Гибкий ротор
D. Nachgiebiger Rotor (Biegee-lastischer Rotor)
Ротор, который сбалансирован на частоте вращения, меньшей первой критической в двух произвольных плоскостях коррекции и у которого значения остаточных дисбалансов могут превышать допустимые на иных частотах вращения вплоть до наибольшей эксплуатационной.
Примечание. Это определение неприменимо к роторам с изменяющейся геометрией
Смотреть что такое «Гибкий ротор» в других словарях:
гибкий ротор — Ндп. упругий ротор нежесткий ротор податливый ротор Ротор, который сбалансирован на частоте вращения, меньшей первой критической в двух произвольных плоскостях коррекции и у которого значения остаточных дисбалансов могут превышать допустимые на… … Справочник технического переводчика
ротор с изменяющейся геометрией — Ротор, у которого при вращении меняется относительное расположение масс. Примечание. Это определение относится также к роторам, имеющим хотя бы один гибкий или упруго закрепленный элемент. [ГОСТ 19534 74] Тематики балансировка вращающихся тел EN… … Справочник технического переводчика
ротор — 3.32 ротор: вращающая часть машины Источник: СТО 17330282.27.140.018 2008: Гидротурбинные установки. Условия поставки. Нормы и требования 3.34 ротор: Вращающаяся часть электрической машины. Источник … Словарь-справочник терминов нормативно-технической документации
Ротор с изменяющейся геометрией — 6. Ротор с изменяющейся геометрией D. Der mechanisch unstabile Rotor Rotor mit veranderlicher Form E. Mechanically unstable rotor F. Rotor a geometric instable Ротор, у которого при вращении меняется относительное расположение масс. Примечание.… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 19534-74: Балансировка вращающихся тел. Термины — Терминология ГОСТ 19534 74: Балансировка вращающихся тел. Термины оригинал документа: 2. n опорный ротор D. n Lagerrotor Е. n support rotor Single support rotor F. Rotor a n support Ротор, имеющий n опор Определения термина из разных документов:… … Словарь-справочник терминов нормативно-технической документации
высокочастотная балансировка (применительно к гибким роторам) — Ндп. высокоскоростная балансировка высокооборотная балансировка Балансировка на такой частоте вращения, при которой балансируемый гибкий ротор уже не может рассматриваться как жесткий. Примечания 1. При высокочастотной балансировке частота… … Справочник технического переводчика
низкочастотная балансировка (применительно к гибким роторам) — Ндп. низкоскоростная балансировка низкооборотная балансировка Балансировка на такой частоте вращения, при которой балансируемый гибкий ротор еще можно рассматривать как жесткий. Примечания 1. При низкочастотной балансировке частота вращения… … Справочник технического переводчика
Высокочастотная балансировка (применительно к гибким роторам) — 86. Высокочастотная балансировка (применительно к гибким роторам) Ндп. Высокоскоростная балансировка Высокооборотная балансировка D. Hochfrequenzanswuchten (Н F Auswuchten) (fur flexible Rotoren) E. High speed balancing (relating to flexible… … Словарь-справочник терминов нормативно-технической документации
Низкочастотная балансировка — 85. Низкочастотная балансировка (применительно к гибким роторам) Ндп. Низкоскоростная балансировка Низкооборотная балансировка D. Niederfrequenzanswuchten (N. F Auswuchten) (fur flexible Rotoren) Е. Low speed balancing (relating to flexible… … Словарь-справочник терминов нормативно-технической документации
испытание — 3.10 испытание: Техническая операция, заключающаяся в определении одной или нескольких характеристик данной продукции, процесса или услуги в соответствии с установленной процедурой. Источник: ГОСТ Р 51000.4 2008: Общие требования к аккредитации… … Словарь-справочник терминов нормативно-технической документации
Виды роторов и виды дисбаланса.
Жесткие роторы на рабочих режимах под действием центробежной силы деформируются незначительно и влиянием этой деформации в расчетах можно пренебречь.
Статический дисбаланс ротора проявляется без вращения ротора, то есть в статике, когда ротор под действием силы тяжести разворачивается «тяжелой точкой» вниз. Пример ротора со статическим дисбалансом приведен на рис.2

рис.2 Статический дисбаланс ротора.
Под действием силы тяжести разворачивается «тяжелой точкой» вниз
Динамический дисбаланс проявляется только при вращении ротора.
Пример ротора с динамическим дисбалансом приведен на рис. 3.

рис.3 Динамический дисбаланс ротора.
Силы Fц1 и Fц2 создают момент, стремящийся развернуть ротор.
Поскольку данный вид дисбаланса проявляется только в динамике при вращении ротора он называется динамическим. Его невозможно устранить в статике балансировкой «на ножах» или другими аналогичными способами. Для устранения динамического дисбаланса необходимо установить два компенсирующих груза, которые создадут момент равный по величине и противоположный по направлению моменту, возникающему от масс М1 и М2. Компенсирующие массы не обязательно должны устанавливаться напротив масс М1 и М2 и быть равными им по величине. Главное, чтобы они создавали момент, полностью компенсирующий момент дисбаланса.
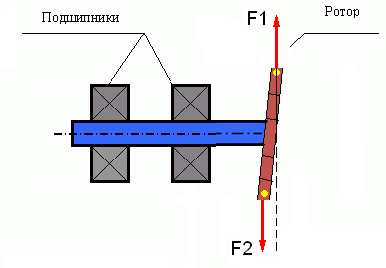
рис.4 Динамический дисбаланс узкого ротора.
Силы F1 и F2 не лежат на одной линии и не компенсируют друг друга.
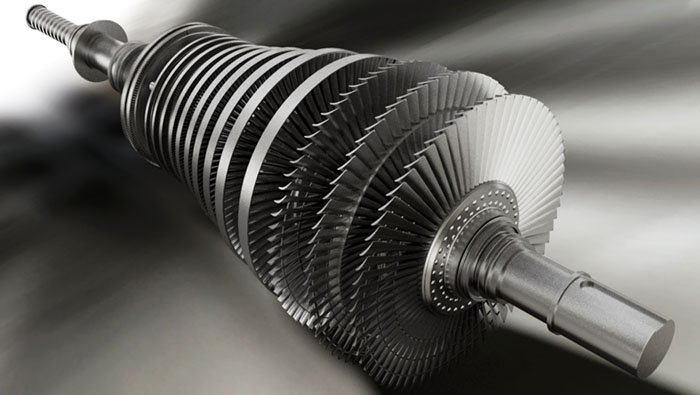
Ротор турбины
Ротор паровой турбины может быть барабанного, дискового или комбинированного типа.
Барабанный ротор применяют при умеренной окружной скорости, большом числе ступеней давления, малых перепадах давлений между ступенями и необходимости очень жесткой конструкции. Эти условия соответствуют особенностям реактивных турбин.
Дисковый ротор применяют при большой окружной скорости, небольшом числе ступеней давления и значительных перепадах давлений между ступенями; все эти условия имеют место в турбинах активного типа.
Комбинированный ротор чаще всего состоит из одного двухвенечного диска в части высокого давления и барабана в части низкого давления; двухвенчатый диск дает возможность уменьшить длину барабана, так как может использовать большой перепад давлений. Ротры этого типа часто устанавливают на активно-реактивные турбины небольшой и средней мощности.

Рассмотрим по отдельности основные части ротра.
Валы. Существует довольно много различных конструкций валов, но их можно разделить на две группы:

Валы изготавливают отковкой из высококачественной стали, после чего проводят соответствующую термическую обработку. Обточка и проверка вала производятся очень тщательно, так как даже почти незаметный изгиб его вызывает вибрацию турбины.
Для вала любой вообще машины существует строго определенное число оборотов, при достижении которого он начинает очень сильно вибрировать; это число оборотов называется критическим числом оборотов вала и зависит от его длины, диаметра и профиля, а также от веса и расположения дисков (распределения нагрузки) и от расположения и типа подшипников.
| Вибрациями в технике, вообще говоря, называют упругие колебания тела, то есть такие колебания, которые возникают под действием какой-либо внешней силы и продолжаются, постепенно затухая, в течении некоторого промежутка времени после того, как действие силы уже прекратилось. Число колебаний тела в единицу времени (например, в 1 сек) называется частотой колебаний, а их размах называется амплитудой колебаний. Каждое тело, имеющее определенную массу и форму и определенным образом закрепленное, будучи выведенным из состояния покоя, имеет известное и всегда постоянное для него число колебаний, которое называется частотой собственный колебаний тела и практически не зависит от величины действующей силы. |
Кроме собственный или свободный колебаний тела, возможны вынужденные колебания его, вызываемые периодически действующими внешними силами. Если внешняя сила действует на тело периодически и частота действия этой силы совпадает с частотой собственных колебаний тела или имеет величину, меньшую частоты собственных колебаний в целое число раз, то наступает резонанс колебаний, причем происходит значительное увеличение их амплитуды, часто разрушающе действующее на тело.
В паровой турбине вынужденные колебания вызываются толчками пара при прохождении лопаток мимо сопел и рядом других причин. Частота этих колебаний зависит от числа оборотов вала. То число оборотов вала, которое равно частоте собственных колебаний вала (в минуту), и является его критическим числом оборотов.
При числах оборотов, больших или меньших критического, вал будет работать спокойно за исключением тех моментов, когда число оборотов оказывается меньше критического в целое число раз. В эти моменты вибрация усиливается, хотя и не достигает такой степени, как при критическом числе оборотов.
Диски. Каждый диск, как уже говорилось выше, несет один или несколько рядов лопаток, вставленных хвостами в проточенные по окружности диска пазы, насаженных на обод диска или насаженных и приклепанных к нему.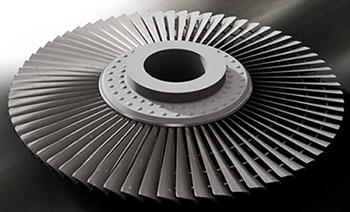
Диски можно выполнять из высококачественной стали, так как они могут быть хорошо прокованы. Поэтому в них и допускают большие напряжения; роторы дискового типа находят широкое применение при больших окружных скоростях.
Материалом дисков служит как простая углеродистая сталь, так и специальные стали (хромоникелевая, хромоникелемолибденовая и другие). Заготовки для дисков тщательно испытывают в заводских лабораториях, и никакие дефекты в них не допускаются; поверхность диска тщательно обрабатывают.
В дисках тех ступеней турбины, которые должны работать без реакции или с малой степенью реакции, обычно сверлят по нескольку отверстий для выравнивания давлений по обе стороны диска.
Посадка дисков на вал производится всегда с значительным натягом, диск насаживают горячим с таким расчетом, чтобы увеличение диаметра отверстия втулки во время эксплуатации турбины было меньше, чем полученное от нагревания при посадке диска.
Дело в том, что во время пуска и в нормальной работе диаметр диска слегка увеличивается за счет нагрева и действия центробежных сил; это вызывает ослабление натяга и посадки диска на валу. Отсутствие натяга при работе может вызвать «болтание» диска, опасную для турбины вибрацию ротора и быть причиной аварии. Рациональное закрепление дисков на валу является поэтому задачей особенно важной.
Существует ряд способов насадки дисков, из которых мы отметим следующие:
Цель этого устройства следующая: если во время работы турбины диск вследствие расширения от нагревания и центробежной силы начнет терять натяг и ослабнет на втулке, то пальцы не позволят диску расцентроваться и болтаться на втулке. Втулка же, плотнго сидящая на валу и имеющая примерно равную с ним температуру и небольшую массу, свой натяг сохранит.
Иногда посадка дисков на вал с помощью пальцевых втулок применяется и в высоконапряженных больших дисках ступеней низкого давления мощных современных турбин.
В настоящее время получили большое распространение роторы, вал которых откован заодно с дисками. Достоинством их являются отсутствие посадок, могущих ослабнуть в эксплуатации турбины, и меньшая длина, так как отпадает необходимость крепления дисков на валу, вследствие чего втулочные части дисков могут быть тоньше. Ввиду того что отковать ротор большого диаметра из одного слитка стали очень трудно, наибольшее применение цельнокованые роторы имеют для частей высокого давления многокорпусных турбин и для быстроходных турбин небольшой мощности. Главный недостаток этих роторов заключается в том, что в случае повреждения одного из дисков приходится заменять весь ротор целиком.
Довольно часто на цельнокованый ротор насаживают один или несколько съемных дисков большого диаметра.
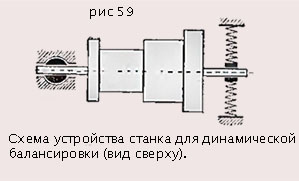
Статическое и динамическое уравновешивание роторов
Для спокойной работы турбины ее ротор перед установкой должен быть безукоризненно отбалансирован (уравновешен) статически и динамически.
Рассмотрим этот вопрос подробнее; допустим, что мы имеем тонкий диск (рис. 56а), центр тяжести которого лежит в точке 2, находящейся на некотором расстоянии от центра вращения 1; причиной этого может быть неоднородность материала диска или неправильная (несимметричная) его обточка. При вращении такого диска появится неуравновешенная центробежная сила, величина которой будет тем больше, чем больше скорость вращения диска, его масса и расстояние центра тяжести от центра вращения. Направление действия этой силы будет лежать на диаметре, проходящем через центр тяжести, причем сила будет направлена наружу (см. стрелку на рис. 56б). На практике величина центробежной силы в быстроходных машинах может достигать нескольких тонн и наличие ее скажется сильными вибрациями вала.
Например, для небольшого диска весом 100 кг с центром тяжести, смещенным всего лишь на 0,1 мм, величина неуравновешенной центробежной силы при 5000 об/мин будет равна 280 кг, то есть почти в 3 раза превысит вес самого диска.
Для того чтобы уравновесить эту силу, достаточно поместить некоторый груз где-либо на том же диаметре, но с другой стороны от центра вращения (например в точке 3 (рис. 56), подобрав его величину так, чтобы возникшая новая центробежная сила имеющая обратное направление, была равна по величине первой силе. В нахождении величины этого груза и места его приложения и заключается статическая балансировка. Практически возможно и другое решение этой задачи, а именно вместо утяжеления стороны, противоположной положению центра тяжести, можно облегчить удалением металла ту сторону, где он находится, и тем сместить его до совпадения с центром вращения. Снимать металл следует по большой поверхности, чтобы не ослабить диска в каком-либо сечении.
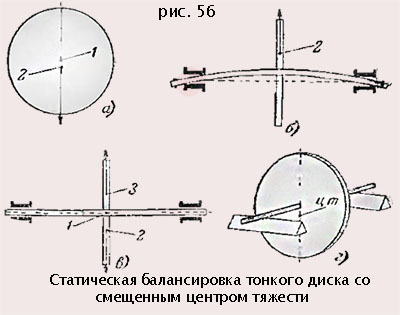
Нахождение плоскости в которой лежит центр тяжести, сравнительно не сложно; если дать возможность диску свободно повернуться на оси, то при остановке его центр тяжести окажется внизу (рис. 56г). Для этой цели вал с диском укладывают на параллельные строго горизонтальные шлифованные призмы из закаленной стали (ножи) или шарикоподошипники, на которых он может поворачиваться с минимальным трением (рис. 57)
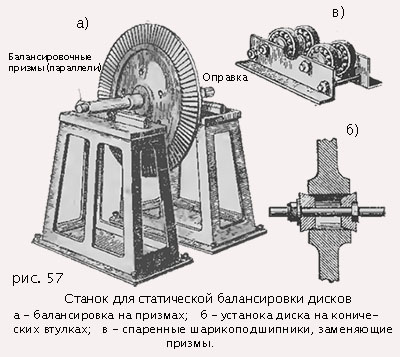
Величину добавляемого груза или количество металла, которое необходимо снять, находят путем постепенных проб; часто для этой цели пользуются какой-нибудь мастикой, кусочки которой налепляют на диск и по достижении его уравновешенности взвешивают. Точно уравновешенный диск, будучи помещен на ножи, должен останавливаться в любом положении.
Особенности балансировки гибкого ротора.
Гибкий ротор, в отличие от жесткого, на высоких частотах вращения, близких к критическим, под действием распределенных по оси вращения центробежных сил может приобретать опасную для эксплуатации изгибную деформацию. Эту деформацию необходимо контролировать и поддерживать в пределах требований, предъявляемых к разным типам роторов в разных условиях эксплуатации /12/.
На каждой из критических частот ротор деформируется определенным образом, с доминирующей формой изгибных колебаний, называемой собственной модой колебаний гибкого ротора.
На рис.6 приведены три основные собственные моды таких колебаний ротора, появляющихся под действием распределенных по длине ротора центробежных сил, для каждого сечения ротора имеющих свои значение и угол. В зависимости от распределения масс и жесткостей по длине гибкого ротора в рабочий диапазон скоростей вращения может попасть до двух критических частот, каждая со своей собственной модой колебаний. Для компенсации опасных изгибных колебаний на частотах вращения, близких к критической, на роторе при проектировании агрегата выделяются дополнительные плоскости коррекции, оптимальные для каждой моды.
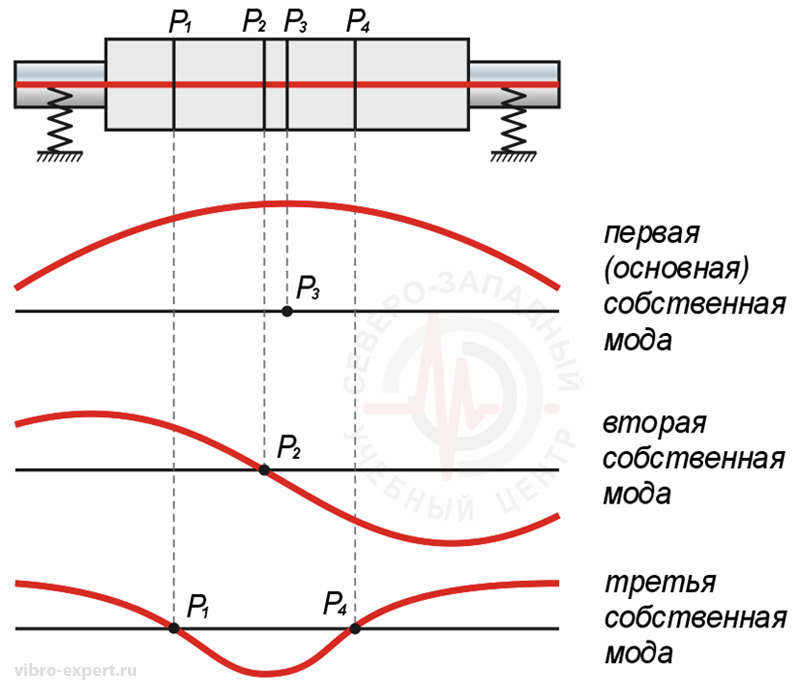
Рис.6. Основные собственные моды изгибной деформации гибкого ротора и возможное расположение плоскостей коррекции на роторе.
На высоких (критических) скоростях вращения гибкого ротора реальные опоры вращения не являются жесткими, т.е. их свойства могут повлиять на величину критической скорости, но влияние жесткости опор на моду пространственных колебаний ротора минимально. Значения собственных частот для каждой из мод рассчитываются при проектировании ротора, а данные о критических скоростях вращения приводятся в документации на ротор (агрегат).
При аксиальной симметрии жесткости опор вращения каждая критическая скорость вращения может «раздваиваться», сохраняя собственную моду колебаний, и иметь из-за разного демпфирования разные величины деформации на раздвоенных резонансных частотах, но это раздвоение при балансировке гибкого ротора обычно не учитывается.
Все вопросы балансировки ротора с учетом собственных мод колебаний обычно решаются на этапе его сборки. Основной способ снижения дисбаланса в разных сечениях ротора заключается в сборке ротора из предварительно сбалансированных деталей, с учетом величины и направления остаточного дисбаланса каждой детали, с компенсацией системного дисбаланса, появляющегося, например, за счет посадки деталей на вал с помощью шпонки /13/.
В особых случаях проводится предварительная низкоскоростная балансировка вала, а затем ротор балансируют после посадки каждого (крупного) узла. Все подобные работы обычно проводят на зарезонансном балансировочном станке (см. ранее).
Во многих практических случаях дальнейшую балансировку ротора на балансировочных станках при высоких скоростях вращения не проводят, ограничиваясь контролем вибрации опор ротора уже собранного агрегата на критических и на номинальных частотах вращения в собственных опорах. Эти измерения обычно выполняются в заводских условиях, на испытательных стендах. Основной причиной отказа от высокоскоростной балансировки ротора является сложность обеспечения высоких скоростей вращения открытого ротора на балансировочном станке.
Основной особенностью балансировки агрегата с гибким ротором на испытательном стенде при частотах вращения выше критической является то, что он балансируется как многорежимный агрегат. При этом пробные массы устанавливаются в плоскостях коррекции таким образом, чтобы на каждом из пробных пусков (при выходе на близкую к критической частоту вращения) возбуждалась преимущественно одна мода изгибных колебаний ротора. В качестве примера для симметричного межопорного ротора на первом пробном пуске пробную массу лучше всего располагать посередине между опорами, которая наиболее сильно изменяет статическую неуравновешенность ротора на низких частотах вращения и дополнительно возбуждает первую моду изгибных колебаний на частотах, близких к первой критической. На втором пуске лучше всего устанавливать кососимметричную пару пробных масс, в плоскостях коррекции, сдвинутых от опор к центру ротора приблизительно на 20% межопорного расстояния. Эта пара масс влияет на моментную неуравновешенность и на второй критической скорости вращения возбуждает вторую моду изгибных колебаний гибкого ротора.
Если в типовых режимах работы агрегата длительное вращение на критических скоростях запрещено, допускаемая величина оборотной вибрации опор при быстром прохождении агрегата через резонанс может быть увеличена, максимально – на 60% (на 4дБ).
Для обеспечения многорежимной балансировки гибкого ротора, например, с помощью балансировочного комплекса КБМ-4, необходимо на каждом пробном пуске агрегата пройти все необходимые режимы, что не всегда удается из-за резкого повышения вибрации несбалансированного ротора на частотах, близких к критической. Причин этого достаточно много, и, прежде всего, – нецентробежные силы с частотой вращения ротора из-за взаимодействия ротора с неподвижными частями через поток воздуха (газа) в высокооборотных турбинах и компрессорах или через электромагнитное поле в электрических машинах.
Выше рассматривались особенности балансировки гибких роторов на балансировочном станке (низкоскоростная балансировка) и на испытательных стендах, с выходом на скорости вращения, близкие к критическим. Балансировка гибких роторов на месте также делится на два вида – низкоскоростную и высокоскоростную, каждая из которых имеет свою специфику.
Первая из задач балансировки на месте – синхронно во всех точках контроля записать исходную вибрацию (и метки с датчика оборотов) агрегата при его выводе из эксплуатации на обслуживание. Если к началу работ по балансировке агрегат не работает, следует разогнать его до максимально возможной скорости, при которой вибрация опор не выходит за порог «опасность» и записать вибрацию в режиме выбега с этой скорости вращения.
Вторая задача – провести пробный пуск (пуски) по алгоритмам балансировки жесткого ротора (группы роторов), разгоняя агрегат до такой же (но безопасной) скорости и провести расчеты компенсирующих масс на нескольких скоростях вращения. Если результаты расчета существенно не изменяются с ростом скорости вращения, рекомендуется закончить первый этап (низкоскоростной балансировки), установив корректирующие массы и произведя пуск агрегата, уже с разгоном до более высокой скорости вращения, но при условии отсутствия опасной вибрации.
Если результаты расчета компенсирующих масс существенно зависят от частоты вращения, это признак появления изгибных колебаний ротора или появления нецентробежных сил взаимодействия ротора с потоком (электромагнитным полем). В этом случае первый этап балансировки чаще всего оказывается недостаточным для вывода агрегата на номинальную скорость вращения и необходимо провести дополнительный пуск агрегата с пробной массой, возбуждающей изгибные колебания первой моды, несмотря на всю сложность установки такой массы на ротор. Далее по коэффициентам влияния, измеренным на каждом пробном пуске, рассчитываются и устанавливаются на ротор корректирующие массы, обеспечивающие минимальную вибрацию агрегата на максимальной из доступных скорости вращения. На этом заканчивается третий этап балансировки, после которого делается попытка выйти на номинальную частоту вращения агрегата.
Следующий этап обычно является завершающим, когда агрегат выходит на номинальный режим работы и по данным измерения вибрации на всех рабочих режимах с использованием полученных коэффициентов влияния производится окончательный расчет параметров компенсирующих масс с последующей их установкой на ротор. Если вывести агрегат на штатные режимы работы не удается, проводится следующий этап балансировки по тому же алгоритму с установкой на ротор пробных масс, возбуждающих изгибные колебания второй моды, и так далее.
Если после выхода на номинальный режим работы агрегата задача достижения требуемых уровней оборотной вибрации опор вращения не решена, проводятся работы по диагностике причины повышенной вибрации (см приложение по диагностике).
Гибкие роторы
Учтем влияние упругой податливости неуравновешенных роторов (валов) на их прогибы и реакции опор. Рассмотрим простейший случай с одной неуравновешенной массой m, смещенной относительно оси вала на величину е (рис. 10.6). При вращении вала на неуравновешенную массу действует сила инерции Fи.
Рис. 10.6. Гибкий вал с одной неуравновешенной массой.
Под действием этой силы Fи ось вала изогнется. В плоскости действия неуравновешенной массы прогиб y равен:
где с – коэффициент жесткости вала.
Прогиб у связан с силой инерции следующим соотношением:
 . (10.7)
. (10.7)
Преобразовывая соотношения (8.6) и (8.7), найдем величину упругого прогиба вала:
 . (10.8)
. (10.8)
Обозначим  , (10.9)
, (10.9)
где  — критическая угловая скорость. Тогда:
— критическая угловая скорость. Тогда:

 (10.10)
(10.10)
Отсюда видно, что при ω > ωк прогиб у→(-е).
Центробежная сила инерции, определяемая выражением (8.7), пропорциональна суммарному дисбалансу (e+y). График зависимости дисбаланса от угловой скорости показан на рис. 10.7. При ω >> ωк сила инерции стремится к нулю.
Для ограничения динамических нагрузок на опоры валов желательно подбирать параметры вала, так, чтобы ω 1,4 ωк .
Рис. 10.7. Зависимость координаты неуравновешенной массы
от угловой скорости ω.
Если на валу укреплено несколько дисков, то колебательная система имеет несколько критических скоростей.
Особенность уравновешивания гибкого ротора состоит в том, что плоскости установки противовесов не могут быть выбраны произвольно.На рис. 10.8 показан гибкий ротор с неуравновешенной массой m, уравновешенный, как жесткий ротор, двумя массами 0,5 m, установленными на боковых дисках.

Рис. 10.8. Статически уравновешенный вал при покое.
Рис. 10.9. Статически уравновешенный вал при движении.
При вращении вала под влиянием упругого прогиба теоретически уравновешенный вал окажется неуравновешенным (рис. 8.17), причем противовесы могут только усугубить неуравновешенность. Поэтому для гибких валов необходимо рассчитывать координаты плоскости установки противовесов по ГОСТ 22061.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет



