Передаточные функции




![]()
![]()
Понятие передаточная функция является наиболее важной категорией в теории автоматического управления и регулирования. Передаточная функция является своего рода математической моделью САР, т.к. полностью характеризует динамические свойства системы.
 Передаточная функция представляет собой отношение изображение по Лапласу выходной величины Y ( S ) к изображению входной величины Х ( S ), т.е.
Передаточная функция представляет собой отношение изображение по Лапласу выходной величины Y ( S ) к изображению входной величины Х ( S ), т.е.
 Учитывая условия
Учитывая условия  для линейных систем уравнение (2.3) запишем в следующем виде:
для линейных систем уравнение (2.3) запишем в следующем виде:
Поскольку для линейных систем можно применить принцип наложения, то будет справедливым выделить следующие два случая:
— сигнал Z ( S ) = 0, тогда 
— сигнал X ( S ) = 0, тогда 
Тогда, для любой САР, имеющей входы по управлению и по возмущению, можно определить две передаточные функции:
 |
 |
Уравнение (2.9) представляет передаточную функцию по управлению, а выражение (2.10) представляет передаточную функцию по возмущению.
Как известно, собственный оператор Q ( p ) может быть записан в следующем виде.
 |
Соответственно оператор управляющего воздействия R1 ( р ) и оператор возмущающего воздействия R2 ( p ) выразим следующим образом:
 |
Следовательно, передаточные функции по управлению и по возмущению представляют собой отношения следующих полиномов:
 |
Для физической реализуемости системы необходимо выполнить условие n>m и n>k.
Если задана структура САР, то можно определить передаточную функцию относительно любых двух точек структуры. При этом необходимо использовать существующие правила и метода структурных преобразований.
Нули и полюса передаточной функции. Что они определяют в поведении системы.
Передаточная функция представляет собой отношение изображение по Лапласу выходной величины Y(S) к изображению входной величины Х(S), т. е.

Передаточные функции содержат особые точки на комплексной плоскости – нули и полюса. Полюса – это те значения S, при которых передаточная функция превращается в бесконечность. Для определения полюсов необходимо собственный оператор (знаменатель передаточной функции) приравнять к нулю и произвести решение алгебраического уравнения относительно S. Нули – это те значения S, при которых передаточная функция равна нулю. Для нахождения нулей числитель передаточной функции приравнивается к нулю, и полученное алгебраическое уравнение решается относительно S. В связи с этим передаточная функция может быть представлена как отношение произведений элементарных сомножителей
 ,
,
где li – полюса передаточной функции; nk – нули передаточной функции.
Звено называется минимально-фазовым, если все нули и полюса его передаточной функции имеют отрицательные или равные нулю вещественные части. Важным свойством минимально-фазовых звеньев является однозначное соответствие амплитудной и фазовой частотных характеристик. Другими словами, по заданной амплитудной характеристике можно определить фазовую и наоборот.
Звено называют неминимально-фазовым, если хотя бы один нуль или полюс его передаточной функции имеет положительную вещественную часть. Неминимально-фазовыми являются также звенья, которые имеют бесконечное число полюсов в левой части комплексной плоскости. Эти звенья известны под названием звенья чистого запаздывания.
Если задана структура САР, то можно определить передаточную функцию относительно любых двух точек структуры. При этом необходимо использовать существующие правила и методы структурных преобразований.
23. Основные принципы регулирования
В современной теории автоматического регулирования различают 4 принципа регулирования:
Задача регулирования заключается в выработке таких управляющих воздействий на объект, которые обеспечили бы равенство выходных переменных некоторым заранее известным, задающим воздействиям. Эта задача еще называется задачей стабилизации.
При конструировании регулятора  в рассматриваемой системе необходимо знать все свойства объекта управления. Только при этом условии и отсутствии возмущений можно правильно предвидеть влияние задающего воздействия на регулируемую величину. Область применения принципа регулирования по нагрузке в «чистом» виде ограничена случаями когда нельзя пренебречь действием возмущений. Неприменим такой подход и в случае неустойчивого или нейтрального объекта управления.
в рассматриваемой системе необходимо знать все свойства объекта управления. Только при этом условии и отсутствии возмущений можно правильно предвидеть влияние задающего воздействия на регулируемую величину. Область применения принципа регулирования по нагрузке в «чистом» виде ограничена случаями когда нельзя пренебречь действием возмущений. Неприменим такой подход и в случае неустойчивого или нейтрального объекта управления.
Регулирование по возмущению. Различают САР с контролируемым возмущением и с косвенной оценкой неконтролируемого возмущения. Структура системы автоматического регулирования в первом случае включает еще один элемент- регулятор по контролируемым возмущениям  , в котором формируется компенсирующее воздействие:
, в котором формируется компенсирующее воздействие: 
Недостатки принципа регулирования по возмущениям:
— как и в предыдущем случае неустойчивые объекты не могут быть стабилизированы с использованием только этого принципа;
— в соответствии с условием компенсации оператор регулятора по возмущениям определяется как:  ; поскольку оператор
; поскольку оператор  моделирует реальный процесс, то обратный оператор не всегда осуществим;
моделирует реальный процесс, то обратный оператор не всегда осуществим;
— в большинстве случаев отсутствует полная информация о  .
.
В обоих случаях – при использовании принципа регулирования по нагрузке или принципа регулирования по возмущениям системы регулирования являются разомкнутыми, в них регулируемая величина не влияет на действие регулятора.
Регулирование по отклонениям. В подавляющем большинстве случаев отсутствует исчерпывающая информация о свойствах объекта управления и действующих возмущений и разомкнутые системы регулирования оказываются неэффективными. Поэтому при синтезе САР прибегают к использованию принципа регулировании по отклонениям (с обратной связью). В этом случае отклонения выходной переменной учитываются при расчете регулирующих воздействий.
Уравнение САР имеет вид:  .
.
Положительными моментами использования принципа регулирования по отклонению является возможность применения для неустойчивых объектов и не предполагается отсутствие или незначительность действующего возмущения. К недостаткам принципа регулирования по отклонениям относится проблема устойчивости САР с большим коэффициентом усиления регулятора.
Регулирование по комбинированному принципу. В этом случае присутствует контур регулирования по контролируемым возмущениям , контур компенсации косвенно оцениваемого возмущения  , контур регулирования по отклонениям
, контур регулирования по отклонениям  и контур реализации задающего воздействия
и контур реализации задающего воздействия  . В конкретных случаях включение или невключение контуров в структуру САР определяется свойствами объекта управления и требованиями, предъявляемыми к качеству регулирования.
. В конкретных случаях включение или невключение контуров в структуру САР определяется свойствами объекта управления и требованиями, предъявляемыми к качеству регулирования.
Основные законы регулирования (П, Пи, ПИД). Изменение поведения систем при использовании регуляторов по временной области
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия U в зависимости от ошибки (отклонения), т.е. U = f(D). Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора. Закон регулирования определяет основные качественные и количественные характеристики систем. Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном виде или в цифровом.
Рассмотрим основные линейные законы регулирования.
В зависимости от вида преобразования ошибки регулирующие устройства можно подразделить на три основных типа:
а также их сочетания. Например, пропорционально-интегральные (ПИ- регуляторы), пропорционально-дифференциальные (ПД-регуляторы) и так далее. Передаточные функции регулирующих устройств имеют следующий вид.
Понятие полюсов и нулей в передаточных функциях
Данная статья объясняет, что такое полюсы и нули, и обсуждает, как полюсы и нули передаточной функции связаны с поведением схем аналоговых фильтров относительно амплитуды и фазы.
В предыдущей статье я представил два стандартных способа представления передаточной функции в s-области для RC фильтра нижних частот первого порядка. Давайте кратко рассмотрим некоторые важные концепции.
Полюсы и нули
Предположим, что у нас есть передаточная функция, в которой переменная s появляется как в числителе, так и в знаменателе. В этой ситуации, по крайней мере, одно значение s приведет к тому, что числитель будет равен нулю, и, по крайней мере, одно значение s приведет к тому, что знаменатель будет равен нулю. Значение, при котором числитель равен нулю, является нулем передаточной функции, а значение, которое приводит к нулю в знаменателе, является полюсом передаточной функции.
Давайте рассмотрим следующий пример:
Полюсы и нули являются определяющими характеристиками фильтра. Если вы знаете расположение полюсов и нулей, то у вас много информации о том, как система будет реагировать на сигналы с разными входными частотами.
Влияние полюсов и нулей
Диаграмма Боде (логарифмическая амплитудно-частотная характеристика, АЧХ) обеспечивает простую визуализацию взаимосвязи между полюсом или нулем и поведением системы при передаче сигнала от входа к выходу.
Частота полюса соответствует угловой частоте, при которой наклон кривой АЧХ уменьшается на 20 дБ/декада, а ноль соответствует угловой частоте, при которой наклон увеличивается на 20 дБ/декада. В следующем примере амплитудно-частотная характеристика представляет собой аппроксимацию амплитудного отклика системы, которая имеет полюс при 10 2 радиана в секунду (рад/с) и ноль при 10 4 рад/с.
 Рисунок 1 – Полюс и ноль на логарифмической амплитудно-частотной характеристике
Рисунок 1 – Полюс и ноль на логарифмической амплитудно-частотной характеристике
Влияние на фазу
В предыдущей статье мы видели, что математическим источником фазо-частотной характеристики фильтра нижних частот является функция арктангенса. Если мы используем функцию арктангенса (точнее, функцию отрицательного арктангенса), чтобы сгенерировать график зависимости фазы (в градусах) от частоты в логарифмическом масштабе, мы получим следующий график:
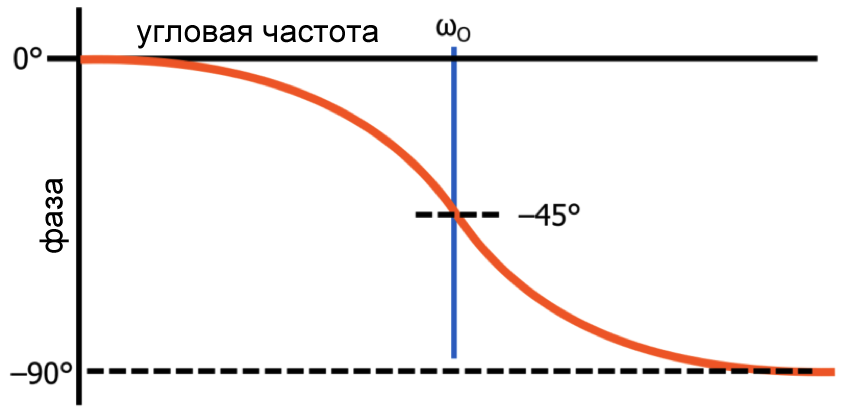 Рисунок 2 – Фазо-частотная характеристика ФНЧ первого порядка
Рисунок 2 – Фазо-частотная характеристика ФНЧ первого порядка
В следующем примере представлена система, которая имеет полюс при 10 2 рад/с и ноль при 10 5 рад/с.
 Рисунок 3 – Полюс и ноль на логарифмической фазо-частотной характеристике
Рисунок 3 – Полюс и ноль на логарифмической фазо-частотной характеристике
Скрытый ноль
Если вы читали предыдущую статью, вы знаете, что передаточная функция фильтра нижних частот может быть записана следующим образом:
У этой системы есть ноль? Если мы применим определение, данное ранее в этой статье, мы сделаем вывод, что его нет – переменная s не появляется в числителе, и поэтому никакое значение s не приведет к тому, что числитель станет равным нулю.
Я попытаюсь дать физическую интерпретацию нуля при ω = ∞ : это указывает на то, что фильтр не может «всегда» продолжать увеличивать ослабление (где «всегда» относится к частоте, а не ко времени). Если вам удастся создать входной сигнал, частота которого продолжает увеличиваться до тех пор, пока она не «достигнет» бесконечности рад/с, то ноль при s = ∞ заставит фильтр прекратить увеличивать ослабление, т.е. наклон амплитудно-частотной характеристики увеличится с –20 дБ/декада до 0 дБ/декада.
Заключение
Мы изучили основные теоретические и практические аспекты полюсов и нулей передаточной функции и увидели, что можем создать прямую связь между частотами полюса и нуля фильтра и его амплитудно-частотной и фазо-частотной характеристиками. В следующей статье мы рассмотрим передаточную функцию фильтра верхних частот первого порядка.
2. Математическое описание систем автоматического управления ч. 2.9 — 2.13
Лекции по курсу «Управление Техническими Системами», читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки», факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность.
Данные лекции только готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В предыдущих сериях:
В это части будут рассмотрены:
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена).
2.10. Весовая и переходная функции звена (системы).
2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции.
2.12. Mетод переменных состояния.
2.13. Переход от описания переменных «вход-выход» к переменным состояния.
Попробуем применить, полученные знания на практике, создавая и сравнивая расчетные модели в разных видах. Будет интересно познавательно и жестко.
2.9. Использование обратных преобразований Лапласа для решения уравнений динамики САР (звена)
Рассмотрим динамическое звено САР изображенное на рисунке 2.9.1

Предположим, что уравнение динамики имеет вид:

где:  — постоянные времени;
— постоянные времени;
 — коэффициент усиления.
— коэффициент усиления.
Пусть известны отображения:

Найдем изображения для производных: 

Подставим полученные выражения в уравнение динамики и получим уравнение динамики в изображениях:

B(s) — слагаемое, которое определяется начальными условиями, при нулевых начальных условиях B(s)=0.
W(s) — передаточная функция.

Передаточной функцией САР (звена) называется отношение изображений выходного сигнала к входному воздействию при нулевых н.у.
После того, как в явном виде найдено изображение для неизвестной выходной величины, нахождение оригинала не представляет сложностей. Либо по формуле Хэвисайда, либо разложением на элементарные дроби, либо по таблице из справочника.
Пример
Построить выходной сигнал звена САР при единичном входном воздействии и нулевых начальных условиях, если уравнение динамики звена имеет следующий вид:


входное воздействие:  — единичное ступенчатое воздействие.
— единичное ступенчатое воздействие.
Выполним преобразование Лапласа:

Подставим в уравнение динамики и получим уравнение динамики в изображениях:

Для получения выходного сигнала из уравнения в изображениях выполним обратное преобразования Лапласа:

2.10. Весовая и переходная функции звена (системы).
Определение: Весовой функцией звена (системы) называется реакция системы при нулевых н.у. на единичное импульсное воздействие.
Определение: Переходной функцией звена (системы) при н.у. называется реакция на единичное ступенчатое воздействие.
На этом месте можно вспомнить, что преобразование Лапласа это интеграл от 0 до бесконечности по времени (см. предыдущий текст), а импульсное воздействие при таком интегрировании превращается в 1  тогда в изображениях получаем что:
тогда в изображениях получаем что:

Передаточная функция играет роль изображения реакции звена или системы на единичное импульсное воздействие.
Для единичного ступенчатого воздействия преобразование Лапласа тоже известно (см. предыдущий текст):

тогда в изображениях получаем, что реакция системы  на ступенчатое воздействие, рассчитывается так:
на ступенчатое воздействие, рассчитывается так:

Реакция системы на единичное ступенчатое воздействие рассчитывается обратным преобразованием Лапласа:

2.11. Определение переходного процесса в системе (САР) (звене) через весовую и переходную функции. Формула Дюамеля-Карсона
Предположим, что на вход системы поступает произвольное воздействие x(t), заранее известное. Найти реакцию системы y(t), если известны входное воздействие x(t) и весовая функция w(t).
Представим, что входное воздействие представляет собой последовательность прямоугольных импульсов до времени t и ступеньки высотой x(t) в момент времени t. см.рис. 2.11 Для каждого импульса мы можем записать реакцию системы через весовую функциию:

где:
 — значение отклика по завершению предыущего импульса;
— значение отклика по завершению предыущего импульса;
 — время завершения текущего импульса;
— время завершения текущего импульса;
 — значение весовой функции в начале текущего импульса.
— значение весовой функции в начале текущего импульса.
Тогда для определения занчения отклика в произвольный момент времени необходимо сложить все импульсы и ступенчатое воздействие в момент времени t:

Переходя к пределам


если перейти от t к бесконечности мы получим формулу интеграла Дюамеля-Карсона, или по другому «интеграла свертки» который обеспечивает вычисление оригинала функции по произвдению изображения двух функций:

где  — вспомогательное время
— вспомогательное время
Для вывода аналогичной зависмости от переходной функции вспомним что изображение весовой и переходной функции связаны соотношением:  запишем выражение изображения для отклика в операторной форме:
запишем выражение изображения для отклика в операторной форме:

Используя интеграл свертки получаем, что при известной переходной функции (h(t)) и известному входному воздействию х(t) выходное воздействие рассчитывается как:

2.12. Mетод переменных состояния.
До этого мы рассматривали системы с одной передаточной функцией, но жизнь всегда сложнее и как правило в системах есть несколько передаточных функций несколько входных воздейстий и несколько реакций системы. (см. рис. 2.12.1)
В этом случае наиболее удобной формой пердставления систем для их анализа и расчета оказался метод переменных состояния. Для этого метода, вместо передаточных функций связывающих вход с выходом используются дополнительные переменные состояния, которые описывают систему. В этом случае можно говорить, что состояние системы — это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно. см. рис. 2.12.2
В методе состояний, производные всех переменных состояния, в общем случае зависит от всех переменных и всех входных воздействия, и могут быть записаны в представленной ниже системы обыкновенных дифференциальных уравнений (ОДУ) первой степени. Эта система уравнений называю системой ОДУ в форме Коши:

Выход из системы зависит от переменных состояния и, в общем случае от входных воздействий и описывается следующей системой уравнений:

где:
n — количество перемнных состояния,
m — количество входных воздействий,
p — количество выходных переменных;
Данная система уравнений может быть записана в матричной форме:

где:
 — вектор входа (или вектор управления);
— вектор входа (или вектор управления);
 — вектор столбец производных переменных состояния;
— вектор столбец производных переменных состояния;
 — вектор столбец переменных состояния;
— вектор столбец переменных состояния;
 — вектор выхода;
— вектор выхода;
 — собственная матрица системы [n x n],
— собственная матрица системы [n x n],
 — постоянные коэффициенты;
— постоянные коэффициенты;
 — матрица входа [n x m],
— матрица входа [n x m],
 — постоянные коэффициенты;
— постоянные коэффициенты;
 — матрица выхода а [p x n],
— матрица выхода а [p x n],
 — постоянные коэффициенты;
— постоянные коэффициенты;
 — матрица обхода [p x m],
— матрица обхода [p x m],
 — постоянные коэффициенты;
— постоянные коэффициенты;
В нашем случае почти всегда все элементы матрицы D будут нулевыми: D = 0.
Такое описание системы позволяет с одной стороны стандартным образом описывать различные технические системы. Явная формула для расчета производных позволяет достаточно просто осуществлять численное интегрирование по времени. И это используется в различных программах моделирования
Другое использование данного представления для простых систем, описанных в переменных «вход-выход», зачастую позволяет устранить технические трудности, связанные с решением ОДУ высокой степени.
Еще одним преимуществом данного описания, является то, что уравнения в форме Коши можно получить из законов физики
Пример решения задачи в форме коши.
Рассмотрим задачу моделирования гидравлического привода, при следующих условиях:
Уравенение движение плунжера:

Где:  – площадь плунжера,
– площадь плунжера,  – жесткость пружины,
– жесткость пружины,  – коэффициент вязкого трения, p – давление в камере.
– коэффициент вязкого трения, p – давление в камере.
Поскольку дифференциальное движения это уравнение второго порядка, превратим его в систему из двух уравнений первого порядка, добавив новую переменную — скорость  , тогда
, тогда 

Уравнение давления в камере, для упрощения принимаем что изменениям объема камеры из-за перемещения плунжера можно пренебречь:

Где: Q – расход в камеру, V — объем камеры.
Расход через дроссель:

Где: f– площадь дросселя,  – давление в источнике, p – давление в камере.
– давление в источнике, p – давление в камере.
Уравнение дросселя не линейное, по условию задачи, давление входное изменяется скачком, от 0 до 200 бар, проведем линеаризацию в окрестности точки давления 100 бар тогда:

Подставляем линеаризованную формул расхода в формулу давления:

Таким образом общая система уравнений в форме Коши, для рис 2.12.3 привода принимает вид:

Матрицы A, B, С, В для матричной формы системы уравнений принимают вид:

Проверим моделированием в SimInTech составленную модель. На рисунке 2.12.13 представлена расчетная схема содержащая три модели:
1 — «Честная» модель со всеми уравнениями без упрощений.
2 — Модель в блоке «Переменные состояние» (в матричной форме).
3 — Модель в динамическом блоке с линеаризованным дросселем.
Все условия задачи задаются как глобальные константы проекта, в главном скрипте проекта, там же расчитываются на этапе инициализации расчета, площади плунжера и проходного сечения дросселя см. рис. 2.12.5:
Рисунок 2.12.5 Глобальный скрипт проекта.
Модель на внутреннем языке программирования представлена на рис. 2.12.6. В данной модели используется описание модели в форме Коши. Так же выполняется учет изменения объема дросселя на каждом шаге расчета, за счет перемещения плунжера (Vk = V0+Ap*x.)
Рисунок 2.12.6 Скрипт расчета модели в форме Коши.
Модель в матричном форме задается с использованием глобальных констант в виде формул. (Матрица в SimInTech задается в виде последовательности из ее столбцов) см. рис. 2.12.7
Результаты расчета показывают, что модель в матричной форме и модель на скриптовом языке в форме Коши, практически полностью совпадают, это означает, что учет изменения объема полости практически не влияют на результаты. Кривые 2 и З совпадают.
Процедура линеаризация расхода через дроссель вызывает заметное отличие в результатах. 1-й график c «честной» моделью дросселя, отличается от графиков 2 и 3. (см. рис. 2.12.8)
Сравним полученные модели, с моделью созданной из библиотечных блоков SimInTech, в которых учитываются так же изменение свойств реальной рабочей жидкости — масла АМГ-10. Сама модель представлена на рис. 2.12.9, набор графиков на рисунке 2.12.10
На графиках видно, что уточненная модель отличается от предыдущих, однако погрешность модели составлят наших упрощенных моделей составляют примерно 10%, в лишь в некоторые моменты времени.
2.13. Переход от описания переменных «вход-выход» к переменным состояния и обратно
Рассмотрим несколько вариантов перехода от описания «вход-выход», к переменным состояния:

Вариант прехода зависит от правой части уравнения с переменными «вход-выход»:

2.13.1. Правая часть содержит только b0*u(t)
В этом варианте, в уравнениях в правой части отсутствуют члены с производными входной величины u(t). Пример с плунжером выше так же относится к этому варианту.
Что бы продемонстрировать технологию перехода рассмотрим следующее уровнение:

Для перехода к форме Коши ведем новые переменные:

И перепишем уравнение относительно y»'(t):

Используя эти переменные можно перейти от дифференциального уравнения 3-го прядка, к системе из 3-х уравнений первого порядка в форме Коши:

Соотвественно матрицы для матричного вида уравнений в переменных сосотяния:

2.13.2. Правая часть общего вида
Более сложный случай, когда в уравнениях есть производные от входных воздействий и уравнение в общем случае выглядит так:
Сделаем преобразования: перейдем к уравнениям динамики в изображениях:

Тогда можно представить уравнение в изображениях в виде:


Разделим уравнение в изображениях на произведение полиномов  , получим:
, получим:

Где:  — некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины
— некоторая комплексная величина (отношение двух комплексных величин). Можно считать, что отображение величины  . Тогда входная величина может быть в изображениях представлена как:
. Тогда входная величина может быть в изображениях представлена как:

Вренемся к оригиналу от изображений получим:  ,
,
где:  — дифференциальный оператор.
— дифференциальный оператор.

А это дифференциальное уравнение n-го порядка мы можем преобразовать к системе из n дифференциальных уравнений первого порядка, как это мы делали выше:

Таким образом, мы получили систему уравнение в форе Коши, относительно переменных состояния  :
:

А регулируемую величину (выход системы) мы так же можем выразить через эти переменные, в изображениях:

Перейдем от изображения к оригиналам:

Если обозначить вектор  , то мы получим уравнения переменных состояниях в матричной форме, где D = 0:
, то мы получим уравнения переменных состояниях в матричной форме, где D = 0:

Пример:
Рисунок 2.13.1 Передаточная функция.
Имеется передаточная функция (рис. 2.13.1) в изображениях :

Необходимо преобразовать передаточную функцию к системе уравнений в форме Коши
В изображения реакция системы связана с входным воздействие соотношением:

Разделим в последнем правую и левую часть на произведения  , и введем новую перменную
, и введем новую перменную  :
:

Полиномы N(s) и L(s) равны:

Перейдем в последнем выражении от изображения к оригиналам и ведем новые переменные (состояния):

Переходим от уравнения третьего порядка к системе трех уравнений первого порядка:

Или в матричной форме:

Для получения второго матричного уравнения воспользуемся соотношением для новых переменных в отображениях:

Перейдем от изображений к оригиналу:

Таким образом второе уравнение матричной системы выглядит так:

Проверим в SimInTech сравнив передаточную функцию и блок переменных состояния, и убедимся, что графики совпадают см. рис. 2.13.2
Рисунок 2.13.2 Сравнение переходного процеса у блока передаточной функции и блока переменных состояния.



