Что такое полярные координаты?
Человеку всегда было важно понять свое место в окружающем мире. Причем не только в пространстве, но и во времени, и в социуме. Оставим в стороне время и социум, это тема отдельного большого разговора.
Сосредоточимся на пространстве. Как определить свое местоположение, местоположение других людей и окружающих предметов? И, что даже более важно, как сообщить это местоположение другим?
Этюд о координатах
Что определить абсолютное местоположение невозможно люди поняли очень давно. Можно только относительно чего либо, какого либо ориентира. Пример такого относительного позиционирования можно найти у Конан Дойля в «Обряд дома Месгрейвов». Помните?
«Сколько надо сделать шагов?» «На север — десять и десять, на восток — пять и пять, на юг — два идва, на запад — один и один и потом вниз».
В современной терминологии, ориентир и набор условий, которые определяют его использование, называют системой координат. А сами координаты определяют положение объекта в этой системе.
Развитие мореплавания, астрономии, геометрии, других наук, потребовало более точного и единообразного способа задания координат объектов. Давайте повнимательнее посмотрим на некоторые системы координат, их применение, изменение, и взаимосвязь между ними. В этой статье, как всегда, будет математика, но почти не будет физики.
Одномерная система координат
Давайте вспомним статью «Сага о треугольниках». Там я немного касался темы систем координат, когда говорил о прямой и плоскости. Начнем с простейшего случая — координатного луча.
Точку, относительно которой указывается положение, или координата, других точек называют началом координат. Обычно ее обозначают «0». Расстояние от начала координат до точки А (в нашем примере) называют координатой. В данном случае координата может быть только положительной, что кажется лишним, и искусственным ограничением. Это можно изменить
Название «координатная прямая» не совсем верное. Прямая не имеет направления. Луч имеет направление, но при этом имеет начало (как в первом случае). Тем не менее, буду использовать именно термин координатная прямая.
Но для любителей точности могу сказать, что так как точка делит прямую на два луча, то направление одного из них можно принять за положительное, а другого за отрицательное. Направление положительного луча обозначим стрелкой, а направление отрицательного ничем не будет обозначаться.
Точка, разделившая прямую на два координатных луча, относительно которой указывают местоположение (координаты) других точек, точно так же называется началом координат.
В этом примере «координату точки А» можно просто обозначить как «А», и она положительна. Координата точки Б отрицательна и обозначается как «-Б». Расстояние между двумя точками определяется как разность их координат. Исходя из этого получим, для нашего примера, расстояние АБ=А-(-Б)=А+Б.
Несмотря на простоту эта система координат применяется достаточно широко. Посмотрите на обычную линейку. Посмотрите на градусник. И это лишь простейшие примеры того, где она применяется.
Двумерная прямоугольная система координат. Декартова система координат
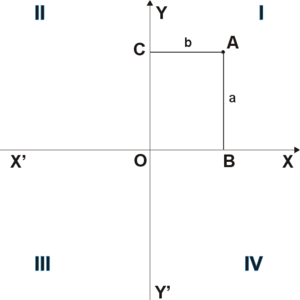
Теперь возьмем две пересекающиеся под прямым углом координатные прямые на плоскости. Мы получим самую широко используемую систему координат Декартову прямоугольную систему координат. Ее знают все еще со школьной скамьи. Ее я тоже упоминал, кратко, в статье «Сага о треугольниках». Давайте посмотрим на нее внимательнее.
Пока все просто, совсем как в школьных учебниках. Теперь координаты точки на плоскости задаются парой чисел. Точка А имеет координаты (Xа,Ya), а точка Б (Хб,-Yб). Координата Х называется абсциссой, а Y ординатой. Расстояние между точками А и Б, или длина отрезка АБ, теперь определяется гораздо сложнее
Откуда взялась эта формула? Если бы отрезок АВ был параллелен оси Х, то его длина была бы равна Хв-Ха, точно так же, как в одномерной системе координат. А если он будет параллелен оси Y, то Yb-Ya. Но у нас отрезок координатным осям не параллелен. А теперь посмотрите на эту же иллюстрацию под несколько другим углом
Видите прямоугольный треугольник? Да, мы опять встретили старого знакомого. И наш отрезок это гипотенуза треугольника. Если вспомнить, что квадрат гипотенузы равен сумме квадратов катетов, то приведенная выше формула становится совершенно очевидной и понятной.
В декартовой системе координат можно задавать не только точки, но и произвольные плоские кривые (мы пока говорим о плоскости). Кривые задаются функциями определяющими зависимость между X и Y. Вот примеры нескольких, хорошо знакомых вам, еще со школы, кривых
Пока ничего особо интересного не было. До сих пор мы не выходили за пределы школьного учебника, но сейчас сделаем небольшой, совсем небольшой, шаг в сторону аналитической геометрии. Не пугайтесь, для понимания будет достаточно знаний геометрии и тригонометрии в рамках школьной программы.
Иногда нужно сменить систему координат, например, для упрощения расчетов. Так координаты вазы на столе можно отсчитывать от угла комнаты, а можно от угла стола. И тут у нас возникает вопрос, а как же изменятся координаты? Другими словами, нам нужны правила преобразования координат между двумя системами координат.
Сначала рассмотрим простейший пример переноса точки начала координат из точки О в точку О1. При этом у нас координатные оси новой системы координат будут параллельны координатным осям старой системы координат
Тут все просто, простейшая арифметика. Мы сдвинули точку начала координат O(0,0) в точку O1(dx,dy). При этом, в новой системе координат точка О1 будет иметь координаты (0,0). Преобразование координат между старой и новой системами будет таким
Но мы можем не только перенести начало координат, но и повернуть новую систему координат.
В этом случае преобразование координат будет сложнее. Я не буду приводить полный вывод формул преобразования координат, что бы излишне не усложнять статью, но покажу, откуда они берутся. Для этого рассмотрим упрощенный случай поворота системы координат без переноса ее начала
Поворот системы координат вокруг своего начала на угол α против часовой стрелки эквивалентен повороту точки А вокруг начала координат на тот же угол, но уже по часовой стрелке. Мы видим два прямоугольных треугольника. Если связать изменение абсциссы и ординаты точки А с углом поворота и добавить сдвиг начала координат, то получим вот такие формулы преобразования
Те, кто знаком с аналитической геометрией, без сомнения, узнали эти формулы. А остальные теперь узнали, откуда они взялись и могут просто применять их, если потребуется.
Давайте вернемся в рамки школьной программы. Кроме замены системы координат возможен и более простой случай преобразования координат. Я говорю об изменении масштаба по осям. По другому это можно назвать деформацией.
Масштаб по осям Х и Y может быть разным. При этом точка начала координат остается на месте. Я не буду приводить формулы преобразований, настолько они просты. Все преобразование будет сводиться к умножению, или делению, на коэффициент масштабирования.
Безусловно, возможно и одновременное выполнение переноса центра координат с поворотом и масштабированием.
Двумерные системы координат. Общий случай
На самом деле, система координат не обязательно требует прямого угла между осями координат. Угол может быть любым. Если при этом оси координат остаются прямыми линиями мы получим аффинную систему координат. Пример аффинной системы можно найти в статье «Сага о треугольниках», правда там я ее так не называл.
Рассмотрение подобных систем координат выходит далеко за рамки статьи, поэтому я ограничусь лишь этим примером.
Трехмерная декартова система координат
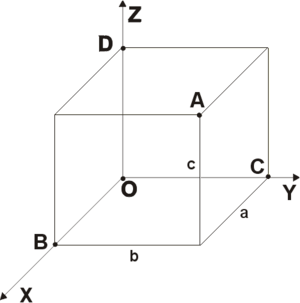
А если мы перейдем в более привычный нам трехмерный мир? К системе координат добавится ось Z. Теперь у нас Х это ширина, Y это высота, а Z это глубина пространства. Если воспользоваться обычным языком, а не математическим. Координата Z называется аппликатой
При этом с направлением оси Z могут быть варианты. Она может идти от нас, как показано на рисунке, или к нам. Это не меняет саму суть системы, но влияет на знак координаты z. Иногда говорят о правосторонней и левосторонней системах координат.
На рисунке я изобразил левостороннюю. Если бы ось Z шла к нам, то система была бы правосторонней. Точки Ayoz, Axoz и Axoy, на рисунке, являются проекциями точки А на соответствующую координатную плоскость.
С трехмерной декартовой системой координат возможны те же самые преобразования, которые мы рассматривали для двумерной. Но сами формулы будут гораздо сложнее и я не буду их приводить. При желании, их можно найти в учебниках аналитической геометрии.
Полярная система координат
Вы когда-нибудь задумывались о том, насколько противоестественной для человека является декартова система координат? Действительно, эта система фактически «взгляд со стороны», тогда как человек чаще всего чувствует центром именно себя.
Вы же не считаете, что, например, дерево расположено от вас в 5 шагах точно направо и 8 шагах точно вперед? Гораздо привычнее сказать, что дерево впереди и немного правее вас и расстояние до него шагов 10.
Этого мало? Посмотрите, например, на свою руку. Она имеет несколько центров вращения — плечо, локоть. И длина костей руки неизменна. Посмотрите на промышленных роботов, например, работающих на сборке автомобиля. Та же самая картина, несколько центров вращения (называемых осями) и сегменты неизменной длины.
Так не проще ли задавать координаты в виде угла поворота относительно центра вращения и расстояния от центра вращения до точки? Пилоты самолетов примерно этим и пользуются. Например, другой самолет на 10 часах и в 100 метрах означает, что он впереди и левее на 60 градусов, а расстояние до него 100 метров.
В математике такая система координат называется полярной. Вместо расстояний по осям в ней задается расстояние от полюса, центра координат, и угол, отсчитываемый против часовой стрелки, от полярной оси.
В полярной системе координаты точки А будут (r,φ). Выглядит непривычно? Между тем, полярная система координат, хоть и менее распространена, чем декартова, среди не математиков, находит широкое применение.
При этом надо отметить, что угол φ обычно лежит в пределах от 0 до 180 градусов. Или, что тоже самое, от 0 до π. Если угол больше 180 градусов, то меняют на угол противоположного знака (отсчет не против, а по часовой стрелке). Уравнениях некоторых кривых в этой системе выглядят проще, чем в декартовой
Да, уравнение окружности, центр которой не расположен в полюсе, выглядит сложноватым. Зато уравнение окружности с центром в полюсе очень простое. А мы ведь всегда можем сменить систему координат перенеся полюс. Прямая линия в полярной системе задается через нормаль, а не двумя точками, но само уравнение достаточно простое.
Кроме механики, я уже говорил о движениях роботов, полярная система находит применение и для работы с комплексными числами. А значит, широко применяется, например, в электротехнике и электронике (помните угол сдвига фазы?). Может использоваться и для векторных вычислений.
Я не буду рассматривать преобразования (сдвиги и вращения) для полярной системы координат. Те, кто в таких преобразованиях нуждаются, аналитическую геометрию и так знают. А для остальных это будет не слишком интересно, Но покажу, как она связана с ранее описанной декартовой системой координат. Да, это опять будут прямоугольные треугольники
Теперь мы можем выразить угол через отношение катетов, то есть координат точки А. А длину вектора r определить через теорему Пифагора. Точно так же легко выполняется и обратное преобразование.
Но давайте посмотрим на эти формулы внимательнее, нет ли тут скрытых проблем? А они есть! Что если наша точка лежит на одной из координатных осей? Увидели? Я специально выделил это красным. Это показывает, что нельзя бездумно применять формулы. Поэтому угол φ обычно вычисляют по другим формулам
В статье приведены формулы вычисления угла в том виде, в каком они приводятся в аналитической геометрии. Однако, в первоначальном варианте я приводил формулы для arcsin и arccos, так как хотел приблизить из вид к «школьному» для упрощения восприятия читателями. Но, как известно, благими намерениями вымощена дорога в ад.
И я упустил из виду, что области значений arcsin и arccos не охватывают всего диапазона от 0 до 360 градусов, так как при этом возникает неоднозначность. Таким образом, использование arcsin и arccos требует отдельного учета знака декартовых координат (номера квадранта), что наоборот усложняет их использование.
И я не указал этой особенности. Спасибо Трушину Виктору, который заметил эту оплошность в х. Это не решает проблему полностью, так как остается еще точка лежащая в начале координат. Но это особый случай, так как эта точка является полюсом. Для полюса невозможно указать угол φ, но сам полюс вполне однозначно определяется условием r=0.
Полярная система координат в пространстве
А что насчет полярной системы координат в трех измерениях? А вот тут возможны варианты. Во первых, мы можем провести ось из полюса перпендикулярную нашей плоскости и отсчитывать дополнительную координату по этой оси. Это даст нам цилиндрическую систему координат
Я уже признавался, что художник из меня плохой, поэтому привожу иллюстрацию из учебника аналитической геометрии кафедры математики физического факультета МГУ.
В цилиндрической системе координат координаты точки М будут (ρ,φ,z).
Но мы может указывать дополнительную координату и как угол к этой оси. Что дает нам сферическую систему координат.
Иллюстрация из учебника кафедры математики физфака МГУ
В этой системе координат точка М будет иметь координаты (r,φ,Θ).
Обратите внимание, что цилиндрическая и сферическая системы координат различаются лишь способом задания и записи координат. Сами системы определяются идентично — плоскостью, в которой лежит полюс и задается угол φ, и ортогональной это плоскости осью.
Я не буду приводить формулы для преобразования между Декартовой трехмерной системой координат и полярными трехмерными системами координат. Что бы не перегружать и не усложнять статью. Желающие могут найти их в учебниках аналитической геометрии.
Заключение
Пожалуй, на этом я остановлюсь. Я не затронул многие другие системы координат. В астрономии используют топоцентрическую, экваториальные, эклиптическую и галактическую системы координат. Координаты объектов на поверхности земного шара (и глобусе) определяются в географической системе координат.
Думаю, все слышали про параллели и меридианы, широту и долготу. Существует геодезическая система координат, учитывающая форму Земли. Есть астрономическая система координат позволяющая определить координаты объектов на поверхности Земли по положению звезд.
Этой системой координат пользовались, например, моряки в своих плаваньях к неизвестным берегам. Эта статья не учебник, это небольшой, и сильно упрощенный, безусловно, далеко не полный, обзор некоторых систем координат использующихся в математике и физике.
И рассчитана она не на корифеев математики, а на интересующихся математикой и физикой обычных людей. Для кого то она слишком проста, для кого то слишком сложна. Ее цель заинтересовать.
Система координат, виды и классификация
Пойдем прямым логическим путем, не отвлекаясь на многие современные международные и отечественные научные термины. Систему координат можно изобразить как некую систему отсчета ориентированную на плоскости двумя направлениями, а в пространстве тремя. Если вспомнить математическую систему, то она представлена двумя взаимно перпендикулярными направлениями, имеющими названия осей абсцисс (X) и ординат (Y). Ориентированы они в горизонтальном и вертикальном направлениях соответственно. Пересечение этих линий является началом координат с нулевыми значениями в абсолютной величине. А местоположение точек на плоскости определяется при помощи двух координат X и Y. В геодезии ориентирование осей на плоскости отличается от математики. Плоскостная прямоугольная система определена осью X в вертикальном положении (в направлении на север) и осью Y в горизонтальном (в направлении на восток).
Классификация систем координат
В геодезии все системы координат можно представить в виде двух групп:
В обеих группах выделяют как плоские (двухмерные), так и пространственные (трехмерные) системы.
К прямолинейным прямоугольным системам относятся цилиндрическая проекция Гаусса-Крюгера, индивидуальные референцные и местные системы координат.
К полярным системам можно отнести географическую, астрономическую и геодезическую, геоцентрические и топоцентрические системы.
Географическая система координат
Замкнутая поверхность внешнего контура Земли представлена сфероидной геометрической формой. За основные направления ориентирования на ней можно принять дуги на поверхности шара. На упрощенно представленном уменьшенном макете нашей планеты в виде глобуса (фигура земли) можно зрительно увидеть принятые линии отсчета в виде Гринвичского меридиана и экваториальной линии.
В этом примере выражена общепринятая во всем мире именно пространственная система географических координат. В ней введены понятия долготы и широты. Имея градусные единицы измерения, они представляют угловую величину. Многим знакомы их определения. Следует напомнить, что географическая долгота конкретной точки представляет угол между двумя плоскостями, проходящими через нулевой (Гринвичский) меридиан и меридиан в определяемой точке расположения. Под географической широтой точки принят угол, образующийся между отвесной линией (или нормалью) к ней и плоскостью экватора.
Понятия астрономической и геодезической системы координат и их различия
Географическая система условно объединяет астрономическую и геодезическую системы. Для того чтобы было понятно какие все-таки существуют различия обратите внимание на определения геодезических и астрономических координат (долготы, широты, высоты). В астрономической системе широта рассматривается как угол между экваториальной плоскостью и отвесной линией в точке определения. А сама форма Земли в ней рассматривается как условный геоид, математически приближенно приравненный к сфере. В геодезической системе широта образовывается нормалью к поверхности земного эллипсоида в конкретной точке и плоскостью экватора. Третьи координаты в этих системах дают окончательное представление в их различиях. Астрономическая (ортометрическая) высота представляет собой превышение по отвесной линии между фактической и точкой на поверхности уровенного геоида. Геодезической высотой считается расстояние по нормали от поверхности эллипсоида до точки вычисления.
Система плоских прямоугольных систем координат Гаусса-Крюгера
Каждая система координат имеет свое теоретическое научное и практическое экономическое применение, как в глобальном, так и региональном масштабах. В некоторых конкретных случаях возможно использование референцных, местных и условных систем координат, но которые через математические расчеты и вычисления все равно могут быть объединены между собой.
Геодезическая прямоугольная плоская система координат является проекцией отдельных шестиградусных зон эллипсоида. Вписав эту фигуру внутрь горизонтально расположенного цилиндра, каждая зона отдельно проецируется на внутреннюю цилиндрическую поверхность. Зоны такого сфероида ограничиваются меридианами с шагом в шесть градусов. При развертывании на плоскости получается проекция, которая имеет название в честь немецких ученых её разработавших Гаусса-Крюгера. В таком способе проецирования углы между любыми направлениями сохраняют свои величины. Поэтому иногда ее называют еще равноугольной. Ось абсцисс в зоне проходит по центру, через условный осевой меридиан (ось X), а ось ординат по линии экватора (ось Y). Длины линий вдоль осевого меридиана передается без искажений, а вдоль экваториальной линии с искажениями к краям зоны.
Полярная система координат
Кроме выше описанной прямоугольной системы координат следует отметить наличие и использование в решении геодезических задач плоской полярной системы координат. За исходное отсчетное направление в ней применяется ось северного (полярного) направления, откуда и название. Для определения местоположения точек на плоскости используют полярный (дирекционный) угол и радиус-вектор (горизонтальное проложение) до точки. Напомним, что дирекционным углом считается угол, отсчитываемый от исходного (северного) направления до определяемого. Радиус-вектор выражается в определении горизонтального проложения. К пространственной полярной системе добавляется геодезические измерения вертикального угла и наклонного расстояния для определения 3D-положения точек. Этот способ практически ежедневно применяется в тригонометрическом нивелировании, топографической съемке и для развития геодезических сетей.
Геоцентрические и топоцентрические системы координат
По такому же полярному методу частично устроены и спутниковые геоцентрическая и топоцентрическая системы координат, с той лишь разницей, что основные оси трехмерного пространства (X, Y, Z) имеют отличные начала и направления. В геоцентрической системе началом координат является центр масс Земли. Ось X имеет направление по Гринвичскому меридиану к экватору. Ось Y располагают в прямоугольном положении на восток от X. Ось Z изначально имеет полярное направление по малой оси эллипсоида. Координатами в ней считаются:
При наблюдении за движением спутников из точки стояния на земной поверхности используют топоцентрическую систему, оси координат которой расположены параллельно осям геоцентрической системы, а ее началом считается пункт наблюдения. Координаты в такой системе:
В современные спутниковые глобальные системы отсчета WGS-84, ПЗ-90 входят не только координаты, но и другие параметры и характеристики важные для геодезических измерений, наблюдений и навигации. К ним относятся геодезические и другие константы:
Прямоугольная система координат
Прямоугольная система координат — прямолинейная система координат с взаимно перпендикулярными осями на плоскости или в пространстве. Наиболее простая и поэтому часто используемая система координат. Очень легко и прямо обобщается для пространств любой размерности, что также способствует ее широкому применению.
Содержание
Прямоугольная система координат на плоскости
Прямоугольная система координат на плоскости образуется двумя взаимно перпендикулярными осями координат  и
и  . Оси координат пересекаются в точке
. Оси координат пересекаются в точке  , которая называется началом координат, на каждой оси выбрано положительное направление.
, которая называется началом координат, на каждой оси выбрано положительное направление.

Положение точки  на плоскости определяется двумя координатами
на плоскости определяется двумя координатами  и
и  . Координата равна длине отрезка
. Координата равна длине отрезка  , координата — длине отрезка
, координата — длине отрезка  в выбранных единицах измерения. Отрезки и определяются линиями, проведёнными из точки параллельно осям и соответственно.
в выбранных единицах измерения. Отрезки и определяются линиями, проведёнными из точки параллельно осям и соответственно.
При этом координате приписывается знак минус, если точка  лежит на луче
лежит на луче  (а не на луче
(а не на луче  , как на рисунке). Координате приписывается знак минус, если точка
, как на рисунке). Координате приписывается знак минус, если точка  лежит на луче
лежит на луче  . Таким образом, и являются отрицательными направлениями осей координат (каждая ось координат рассматривается как числовая ось).
. Таким образом, и являются отрицательными направлениями осей координат (каждая ось координат рассматривается как числовая ось).
Координата называется абсциссой точки , координата — ординатой точки .
Символически это записывают так:


или указывают принадлежность координат конкретной точке с помощью индекса:

Прямоугольная система координат в пространстве
Прямоугольная система координат в пространстве (в этом параграфе имеется в виду трехмерное пространство, о более многомерных пространствах — см. ниже) образуется тремя взаимно перпендикулярными осями координат ,  и
и  . Оси координат пересекаются в точке , которая называется началом координат, на каждой оси выбрано положительное направление, указанное стрелками, и единица измерения отрезков на осях. Единицы измерения обычно (не обязательно [2] ) одинаковы для всех осей. — ось абсцисс, — ось ординат, — ось аппликат.
. Оси координат пересекаются в точке , которая называется началом координат, на каждой оси выбрано положительное направление, указанное стрелками, и единица измерения отрезков на осях. Единицы измерения обычно (не обязательно [2] ) одинаковы для всех осей. — ось абсцисс, — ось ординат, — ось аппликат.
Положение точки в пространстве определяется тремя координатами , и  . Координата равна длине отрезка , координата — длине отрезка , координата — длине отрезка
. Координата равна длине отрезка , координата — длине отрезка , координата — длине отрезка  в выбранных единицах измерения. Отрезки , и определяются плоскостями, проведёнными из точки параллельно плоскостям
в выбранных единицах измерения. Отрезки , и определяются плоскостями, проведёнными из точки параллельно плоскостям  ,
,  и
и  соответственно.
соответственно.
Координата называется абсциссой точки , координата — ординатой точки , координата — аппликатой точки .
Символически это записывают так:


или привязывают запись координат к конкретной точке с помощью индекса:

Каждая ось рассматривается как числовая прямая, т. е. имеет положительное направление, а точкам, лежащим на отрицательном луче приписываются отрицательные значения координаты (расстояние берется со знаком минус). То есть, если бы, например, точка лежала не как на рисунке — на луче , а на его продолжении в обратную сторону от точки (на отрицательной части оси ), то абсцисса точки была бы отрицательной (минус расстоянию ). Аналогично и для двух других осей.
Прямоугольные все системы координат в трехмерном пространстве делятся на два класса — правые (также используются термины положительные, стандартные) и левые. Обычно по умолчанию стараются использовать правые координатные системы, а при их графическом изображении еще и располагать их если можно, в одном из нескольких обычных (традиционных) положений. (На рис. 2 изображена правая координатная система). Правую и левую системы координат невозможно поворотами [3] совместить так, чтобы совпали соответствующие оси (и их направления). Определить, к какому классу относится какая-либо конкретно взятая система координат можно используя правило правой руки, правило винта итп (положительное направление осей выбирают так, чтобы при повороте оси против часовой стрелки на 90° её положительное направление совпало с положительным направлением оси , если этот поворот наблюдать со стороны положительного направления оси ).
Прямоугольная система координат в многомерном пространстве
Прямоугольная система координат может быть использована и в пространстве любой конечной размерности аналогично тому, как это делается для трехмерного пространства. Количество координатных осей при этом равно размерности пространства (в этом параграфе будем обозначать ее n).
Для обозначения координат обычно [4] применяют не разные буквы, а одну и ту же букву с числовым индексом. Чаще всего это:

Для обозначения произвольной i-ой координаты из этого набора используют буквенный индекс:

а нередко обозначение используют и для обозначения всего набора, подразумевая, что индекс пробегает весь набор значений:  .
.
Прямоугольные координаты вектора
Для векторов (направленных отрезков), начало которых не совпадает с началом координат, прямоугольные координаты можно определить одним из двух способов:
2. Вместо этого можно просто вычесть из координат конца вектора (направленного отрезка) координаты его начала.
В прямоугольных координатах очень просто записываются все операции над векторами:


 а отсюда и вычитание и деление:
а отсюда и вычитание и деление: 



(Это верно для любой размерности n и даже, наравне с прямоугольными, для косоугольных координат).

(Только в прямоугольных координатах с единичным масштабом по всем осям).
для любой размерности пространства,
Очевидно, всё это позволяет, если надо, свести все операции над векторами к достаточно простым операциям над числами.
В трёхмерном случае такие орты обычно обозначаются
 ,
,  и
и 
 ,
,  и
и  .
.
Могут также применяться обозначения со стрелками ( ,
,  и
и  или
или  ,
,  и
и  ) или другие в соответствии с обычным способом обозначения векторов в той или иной литературе.
) или другие в соответствии с обычным способом обозначения векторов в той или иной литературе.
При этом в случае правой системы координат действительны следующие формулы с векторными произведениями ортов:
Для более высоких, чем 3, размерностей (или для общего случая, когда размерность может быть любой) обычно для ортов применяют вместо этого обозначения с числовыми индексами, достаточно часто [10] это

Вектор любой размерности раскладывается по базису (координаты служат коэффициентами разложения):


а для ортонормированного базиса координаты еще и очень легко найти через скалярные произведения с ортами:

История
Впервые прямоугольную систему координат ввел Рене Декарт в своей работе «Рассуждение о методе» в 1637 году. Поэтому прямоугольную систему координат называют также — Декартова система координат. Координатный метод описания геометрических объектов положил начало аналитической геометрии. Вклад в развитие координатного метода внес также Пьер Ферма, однако его работы были впервые опубликованы уже после его смерти. Декарт и Ферма применяли координатный метод только на плоскости.
Координатный метод для трёхмерного пространства впервые применил Леонард Эйлер уже в XVIII веке.
Использование ортов восходит, по-видимому, к Гамильтону и Максвеллу.



