Система отсчета
Система отсчета – это совокупность тела отсчета, со связанной с ним системой координат и прибором для измерения времени.
Что такое система отсчета. Афинная и декартовая системы координат
Если рассматривать все системы отсчета относительно кинематики – они аналогичные. В кинематике не указываются преимущества одной системы отсчета при сравнении с другой. Для удобства решения выбирается наиболее приемлемая система.
Чтобы описать пространство, в котором происходит движение материальной точки, система отсчета связывается с пространственной системой координат.
Системой пространственных координат называют совокупность определений, которая может реализовать метод координат, то есть определение положения точки или тела с помощью чисел или символов.
Числа, способные указать положение выбранной точки в трехмерном пространстве, называются координатами этой точки.
Аффинная система координат – это три линейно независимых вектора (координатных осей), выходящие из одной точки, то есть из начала отсчета.
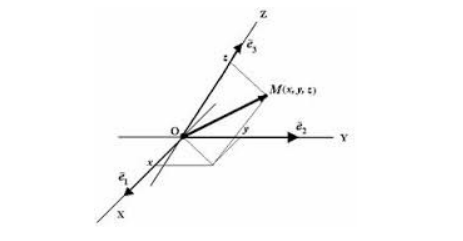
Чтобы однозначно определить положение точки М в пространстве, то предполагают наличие зависимости радиус-вектора r → от параметра t (времени) таким образом, что каждому значению параметра t соответствует одно значение функции:
Данное равенство получило название кинематического уравнения движения материальной точки М в векторной форме.
Цилиндрическая и сферическая системы координат
Чтобы описать криволинейное и аффинное движение, применяют криволинейные системы координат, которые упрощают форму записи законов движения тел для облегчения вычисления. Чаще всего используют цилиндрические и сферические системы координат.
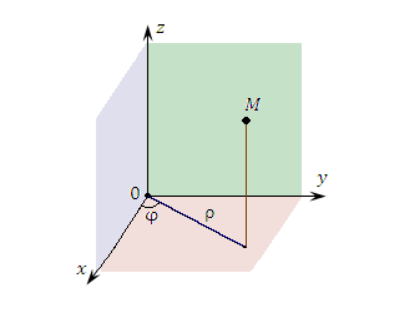
Связь между декартовыми и цилиндрическими координатами может быть задана при помощи формул:
Рисунок 4 показывает, что можно вывести формулы, связывающие сферические и декартовые координаты:
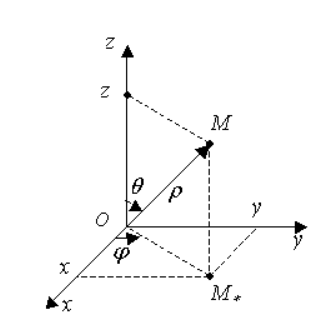
Рисунок 4 . Сферические координаты точки М
Имеются другие системы криволинейных координат, с помощью которых возможно нахождение координат заданной точки: параболические, гиперболические, эллиптические и другие.
Система отсчета выбирается индивидуально относительно каждого случая в отдельности, учитывается особенность движения тела, с помощью которой определяется наиболее простой закон движения заданного тела или точки.
Координаты. Декартова система координат.
Координаты – совокупность данных, на основании которых точно характеризуется местоположение объекта.
Рене Декарт (1596–1650) предложил представлять местоположение точки на плоскости при помощи пары координат.
Для характеристики координат требуются ориентиры. Данными ориентирами на плоскости выступают две числовые оси. Сначала чертят горизонтальную ось, её принято определять как ось абсцисс и подписывать буквой х, указывают, что это ось 0х. Положительное направление на оси абсцисс принято слева на право и указывается стрелкой.
Следующей чертят вертикально ось, её принято определять как ось ординат и подписывать буквой у, указывают, что это ось 0у. Положительное направление на оси ординат принято снизу вверх и указывается стрелкой.
Оси пересекаются под углом 90°, то есть являются взаимно перпендикулярными. Точку их пересечения обозначают как «0». Точку «0» принято считать исходной точкой для отсчёта по каждой из осей.
Система координат — это две взаимно перпендикулярные координатные прямые, которые пересекаются в месте, являющемся началом отсчёта для каждой из них.
Координатные оси — это прямые, формирующие систему координат.
Ось абсцисс (0x) — расположенная горизонтально ось.
Ось ординат (0y) —расположенная вертикально ось.
Координатная плоскость — плоскость, в которой сформирована система координат. Для обозначения данной плоскости применяют x0y.
Цифры, указывающие числовые значения на осях размещают как по правую, так и по левую сторону от оси 0y. Цифры на оси 0x принято указывать внизу под осью.
Чаще всего единичные отрезки по оси 0y и оси 0x одинаковы. Но встречаются ситуации, когда они не равны друг другу.
Оси координат разделяют плоскость на 4 угла, которые обозначают как координатные четверти. Четверть, сформированная положительными полуосями (правый верхний угол), принято считать первой (I). Остальные четверти (координатные углы) располагаем против часовой стрелки.
Механическое движение и его характеристики
теория по физике 🧲 кинематика
Механика — раздел физики, который изучает механическое движение физических тел и взаимодействие между ними.
Основная задача механики — определение положение тела в пространстве в любой момент времени.
Механическое движение — изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение и его виды
По характеру движения точек тела выделяют три вида механического движения:
По типу линии, вдоль которой движется тело, выделяют два вида движения:
По скорости выделяют два вида движения:
По ускорению выделяют три вида движения:
Что нужно для описания механического движения?
Для описания механического движения нужно выбрать, относительно какого тела оно будет рассматриваться. Движение одного и того же объекта относительно разных тел неодинаковое. К примеру, идущий человек относительно дерева движется с некоторой скоростью. Но относительно сумки, которую он держит в руках, он находится в состоянии покоя, так как расстояние между ними с течением времени не изменяется.
Решение основной задачи механики — определения положения тела в пространстве в любой момент времени — заключается в вычислении координат его точек. Чтобы вычислить координаты тела, нужно ввести систему координат и связать с ней тело отсчета. Также понадобится прибор для измерения времени. Все это вместе составляет систему отсчета.
Система отсчета — совокупность тела отсчета и связанных с ним системы координат и часов.
Тело отсчета — тело, относительно которого рассматривается движение.
Часы — прибор для отсчета времени. Время измеряется в секундах (с).
При описании движения тела важно учитывать его размеры, так как характер движения его отдельных точек может различаться. Но в рамках некоторых задач размер тела не влияет на результат решения. Тогда его можно считать пренебрежительно малым. Тогда тело рассматривают как движущуюся материальную точку.
Материальная точка — это тело, размерами которого можно пренебречь в условиях конкретной задачи. Допустимо принимать тело за точку, если оно движется поступательно или его размеры намного меньше расстояний, которые оно проходит.
Виды систем координат
В зависимости от характера движения тела для его описания выбирают одну из трех систем координат:

Способы описания механического движения
Описать механическое движение можно двумя способами:
Координатный способ

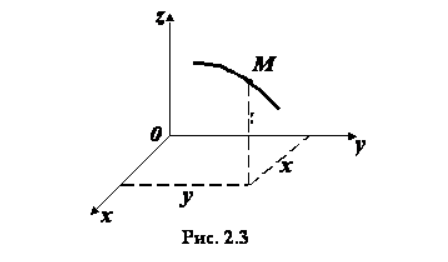
Указать положение материальной точки в пространстве можно, используя трехмерную систему координат. Если эта точка движется, то ее координаты с течением времени меняются. Так как координаты точки зависят от времени, можно считать, что они являются функциями времени. Математически это записывается так:

Эти уравнения называют кинематическими уравнениями движения точки, записанными в координатной форме.
Векторный способ
Радиус-вектор точки — вектор, начало которого совпадает с началом системы координат, а конец — с положением этой точки.

Указать положение точки в трехмерном пространстве также можно с помощью радиус-вектора. При движении точки радиус-вектор со временем изменяется. Он может менять направление и длину. Это значит, что радиус-вектор тоже можно принять за функцию времени. Математически это записывается так:
Эта формула называется кинематическим уравнением движения точки, записанным в векторной форме.
Характеристики механического движения
Движение материальной точки характеризуют три физические величины:
Перемещение


Траектория — линия, которую описывает тело во время движения.
Путь — длина траектории. Обозначается буквой s. Единица измерения — метры (м).
Путь есть функция времени:
Модуль перемещения — длина вектора перемещения. Обозначается как |Δ r |. Единица измерения — метры (м).
Модуль перемещения необязательно должен совпадать с длиной пути.
Пример №1. Человек обошел круглое поле диаметром 1 км. Чему равны пройденный путь и перемещение, которое он совершил.
Путь равен длине окружности. Поэтому:

Человек, обойдя круглое поле, вернулся в ту же точку. Поэтому его начальное положение совпадает с конечным. В этом случае человек совершил перемещение, равное нулю.
Пример №2. Точка движется по окружности радиусом 10 м. Чему равен путь, пройденный этой точкой, в момент, когда модуль перемещения равен диаметру окружности?
Диаметр — это отрезок, который соединяет две точки окружности и проходит через центр. Перемещение равно длине этого отрезка в случае, если один из концов этого отрезка является началом вектора перемещения, а другой — его концом. Траекторией движения в этом случае является дуга, равная половине окружности. А длина траектории есть путь:

Скорость
Скорость — векторная физическая величина, характеризующая быстроту перемещения тела. Численно она равна отношению перемещения за малый промежуток времени к величине этого промежутка.

Скорость характеризуется не только направлением вектора скорости, но и его модулем.
Модуль скорости — расстояние, пройденное точкой за единицу времени. Обозначается буквой V и измеряется в метрах в секунду (м/с).
Математическое определение модуля скорости:
Величина скорости тела в данный момент времени есть первая производная от пройденного пути по времени:
Ускорение
Ускорение — векторная физическая величина, которая характеризует быстроту изменения скорости тела. Численно она равна отношению изменения скорости за малый промежуток времени к величине этого промежутка.

Модуль ускорения — численное изменение скорости в единицу времени. Обозначается буквой a. Единица измерения — метры в секунду в квадрате (м/с 2 ).
Математическое определение модуля скорости:
 v — скорость тела в данный момент времени, v0— его скорость в начальный момент времени, t — время, в течение которого эта скорость менялась.
v — скорость тела в данный момент времени, v0— его скорость в начальный момент времени, t — время, в течение которого эта скорость менялась.
Ускорение тела есть первая производная от скорости или вторая производная от пройденного пути по времени:

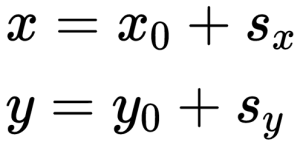
Проекция вектора перемещения на ось координат
Проекция вектора перемещения на ось — это скалярная величина, численно равная разности конечной и начальной координат.

Проекция вектора на ось OX:

Проекция вектора на ось OY:

Знаки проекций перемещения
Проекция вектора перемещения на ось считается нулевой, если вектор расположен перпендикулярно этой оси.
Модуль перемещения — длина вектора перемещения:
Модуль перемещения измеряется в метрах (м).
Вместе с собственными проекциями модуль перемещения образует прямоугольный треугольник. Сам он является гипотенузой этого треугольника. Поэтому для его вычисления можно применить теорему Пифагора. Выглядит это так:
Выразив проекции вектора перемещения через координаты, эта формула примет вид:

Выражение проекций вектора перемещения через угол его наклона по отношению к координатным осям:
Общий вид уравнений координат:
Пример №3. Определить проекции вектора перемещения на ось OX, OY и вычислить его модуль.

Определяем координаты начальной точки вектора:

Определяем координаты конечной точки вектора:
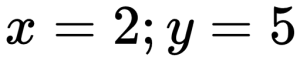
Проекция вектора перемещения на ось OX:

Проекция вектора перемещения на ось OY:

Применяем формулу для вычисления модуля вектора перемещения:

Пример №4. Определить координаты конечной точки B вектора перемещения, если начальная точка A имеет координаты (–5;5). Учесть, что проекция перемещения на OX равна 10, а проекция перемещения на OY равна 5.
Извлекаем известные данные:

Для определения координаты точки В понадобятся формулы:

Выразим из них координаты конечного положения точки:

Точка В имеет координаты (5; 10).
Алгоритм решения
Решение
Записываем исходные данные:
Записываем формулу ускорения:

Так как начальная скорость равна 0, эта формула принимает
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.

Отсюда скорость равна:
Подставляем имеющиеся данные и вычисляем:
pазбирался: Алиса Никитина | обсудить разбор | оценить
Прямоугольная система координат
В повседневной жизни часто можно услышать фразу: «Оставь мне свои координаты». В ответ человек обычно оставляет свой адрес или номер телефона, то есть данные, по которым его можно найти.
Координаты могут обозначаться самыми разными наборами цифр или букв.
Например, номер автомобиля — это координаты, потому что по номеру машины можно определить из какого она города и кто ёё владелец.
Координаты — это набор данных, по которому определяется положение того или иного объекта.
Примерами координат являются: номер вагона и места в поезде, широта и долгота на географической карте, запись положения фигуры на шахматной доске, положение точки на числовой оси и т.д.
Всегда, когда мы по определенным правилам однозначно обозначаем какой-то объект набором букв, чисел или других символов, мы задаём координаты объекта.
Декартова система координат
Французкий математик Рене Декарт (1596–1650) предложил задавать положение точки на плоскости с помощью двух координат.
Для нахождения координат нужны ориентиры, от которых ведётся отсчёт.
Оси взаимно перпендикулярны (т.е. угол между ними равен 90° ) и пересекаются в точке, которую обозначают « O ». Точка « O » является началом отсчёта для каждой из осей.

Система координат — это две взаимно перпендикулярные координатные прямые, пересекающиеся в точке, которая является началом отсчёта для каждой из них.
Координатные оси — это прямые, образующие систему координат.
Ось абсцисс « Ox » — горизонтальная ось.
Ось ординат « Oy » — вертикальная ось.
Координатная плоскость — плоскость, в которой построена система координат. Обозначается плоскость как « x0y ».
Обращаем ваше внимание на выбор длины единичных отрезков по осям.
Цифры, обозначающие числовые значения на осях можно располагать как справа, так и слева от оси « Oy ». Цифры на оси « Ox », как правило, пишут внизу под осью.
Обычно единичный отрезок на оси « 0y » равен единичному отрезку на оси « 0x ». Но бывают случаи, когда они не равны друг другу.
Отсчитываем четверти (или координатные углы) против часовой стрелки.
Система координат
Система координат — комплекс определений, реализующий метод координат, то есть способ определять положение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки.
В математике координаты — совокупность чисел, сопоставленных точкам многообразия в некоторой карте определённого атласа.
В элементарной геометрии координаты — величины, определяющие положение точки на плоскости и в пространстве. На плоскости положение точки чаще всего определяется расстояниями от двух прямых (координатных осей), пересекающихся в одной точке (начале координат) под прямым углом; одна из координат называется ординатой, а другая — абсциссой. В пространстве по системе Декарта положение точки определяется расстояниями от трёх плоскостей координат, пересекающихся в одной точке под прямыми углами друг к другу, или сферическими координатами, где начало координат находится в центре сферы.
В географии координаты — широта, долгота и высота над известным общим уровнем (например, океана). См. географические координаты.
В астрономии координаты — величины, при помощи которых определяется положение звезды, например, прямое восхождение и склонение.
Небесные координаты — числа, с помощью которых определяют положение светил и вспомогательных точек на небесной сфере. В астрономии употребляют различные системы небесных координат. Каждая из них по существу представляет собой систему полярных координат на сфере с соответствующим образом выбранным полюсом. Систему небесных координат задают большим кругом небесной сферы (или его полюсом, отстоящим на 90° от любой точки этого круга) с указанием на нём начальной точки отсчёта одной из координат. В зависимости от выбора этого круга системы небесных координат называлась горизонтальной, экваториальной, эклиптической и галактической.
Наиболее используемая система координат — прямоугольная система координат (также известная как декартова система координат).
Координаты на плоскости и в пространстве можно вводить бесконечным числом разных способов. Решая ту или иную математическую или физическую задачу методом координат, можно использовать различные координатные системы, выбирая ту из них, в которой задача решается проще или удобнее в данном конкретном случае. Известным обобщением системы координат являются системы отсчёта и системы референции.
Содержание
Список наиболее распространённых систем координат
Основные системы
В этом разделе даются разъяснения к наиболее употребляемым системам координат в элементарной математике.
Декартовы координаты
Расположение точки P на плоскости определяется декартовыми координатами с помощью пары чисел  :
:
В пространстве же необходимо уже 3 координаты  :
:
Полярные координаты
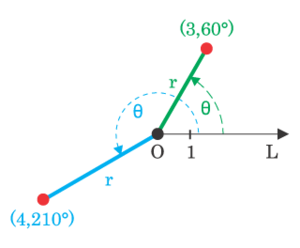

В полярной системе координат положение точки определяется расстояние до центра координат и углом радиус-вектора с осью Ox.
Термин «полярные координаты» используется только на плоскости, в пространстве применяются цилиндрические и сферические системы координат.
Цилиндрические координаты
Цилиндрические координаты — трехмерный аналог полярных, в котором точка P представляется трехкомпонентным кортежем  . В терминах декартовой системы координат,
. В терминах декартовой системы координат,
Полярные координаты имеют один недостаток: значение θ теряет смысл, если r = 0.
Цилиндрические координаты полезны для изучения систем, симметричных вокруг некой оси. Например, длинный цилиндр в декартовых координатах имеет уравнение  , тогда как в цилиндрических оно выглядит как r = c
, тогда как в цилиндрических оно выглядит как r = c
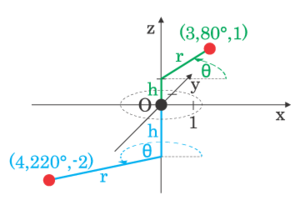
Сферические координаты
Сферические координаты — трехмерный аналог полярных
Обозначения, принятые в Америке
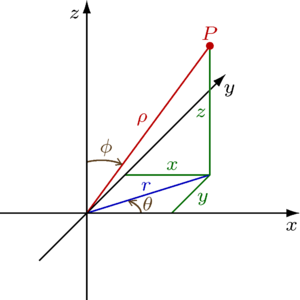
В сферической системе координат, расположение точки P определяется тремя компонентами:  . В терминах декартовой системы координат,
. В терминах декартовой системы координат,
Сферическая система координат также имеет недостаток: φ теряет смысл если ρ = 0, также и θ теряет смысл, если ρ = 0 или φ = 0 или φ = 180°.
Для построения точки по её сферическими координатами, нужно: от полюса отложить отрезок, равный ρ вдоль положительной z-оси, вернуть его на угол φ вокруг оси y в направлении положительной x-оси, и вернуть на угол θ вокруг z-оси в направлении положительной y-оси.
Сферические координаты полезны при изучении систем, симметричных вокруг точки. Так, уравнение сферы в декартовых координатах выглядит как  , тогда как в сферических становится намного проще:
, тогда как в сферических становится намного проще:  .
.
Европейские обозначения
В Европе принято использовать другие обозначения. Положение точки задаётся числами:  , Где r — расстояние от точки до начала координат,
, Где r — расстояние от точки до начала координат,  — полярный угол, который изменяется в пределах от 0 до π,
— полярный угол, который изменяется в пределах от 0 до π,  — Азимутальный угол, который изменяется в пределах от 0 до 2π. То есть, в европейской системе, которая применяется также и в России, обозначения для углов переставлены по сравнению с американской.
— Азимутальный угол, который изменяется в пределах от 0 до 2π. То есть, в европейской системе, которая применяется также и в России, обозначения для углов переставлены по сравнению с американской.
Переход из одной системы координат в другую
Декартовы и полярные







