Способы оперативного контроля движения судна при плавании вблизи берегов. Метод параллельных индексов.
При плавании в стесненных водах, где судно как правило движется по рекомендованным путям или фарватерам практически непрерывно необходим контроль за движением судна по заданному пути одновременно с наблюдением окружающей обстановки. Непрерывный контроль за движением судна основан на следующих свойствах радиолокационного изображения:
Методы непрерывного контроля основаны на глазомерной оценке положения судна относительно характерных ориентиров навигационных опасностей или ограждающих их изолиний.
1. Ограждающее или опасное расстояние применяется для непрерывного контроля, за положением судна относительно навигационных опасностей при плавании вблизи берегов и в узостях.



Определение и исправление инструментальной поправки секстана. Определение поправки индекса. Порядок выполенения наблюдений небесных светил и вычисления элементов линий положения. Определение вероятного места судна.
При измерении высот светил необходимо учитывать поправку секстанта С, которая включает инструментальную ошибку прибора и личную ошибку штурмана при измерении. Вследствие того, что поправка секстанта зависит от личной ошибки наблюдателя, необходимо, чтобы ее определение производилось тем штурманом, который будет пользоваться данным секстантом.
Величина поправки секстанта с течением времени может изменяться за счет ударов и сотрясений прибора в процессе его эксплуатации. Поэтому поправку секстанта необходимо периодически проверять, но не реже одного раза в три месяца, а также при подготовке к выполнению особо ответственных заданий.
В практике применяются следующие наиболее распространенные способы определения поправки секстанта: измерение высоты светила в момент его кульминации; прокладка астрономических линий положения; сравнение широты места наблюдателя, снятой с карты, с широтой, полученной по измеренной высоте Полярной звезды.
Способы определения контроля движения судна при плавании вблизи берегов. Параллельная индексация в РЛС и САРП




![]()
![]()
При плавании в стесненных водах, где судно, как правило, движется по рекомендованным путям или фарватерам практически непрерывно необходим контроль за движением судна по заданному пути одновременно с наблюдением окружающей обстановки. На большинстве судов для непрерывного контроля движения судна при плавании в стесненных водах можно быть использована судовая РЛС или система САРП. если на экране видны эхо-сигналы характерных объектов (маяки, островки, скалы и т.д.) Непрерывный контроль за движением судна основан на следующих свойствах радиолокационного изображения:
Методы непрерывного контроля основаны на глазомерной оценке положения судна относительно характерных ориентиров навигационных опасностей или ограждающих их изолиний.
1. Ограждающее или опасное расстояние применяется для непрерывного контроля, за положением судна относительно навигационных опасностей при плавании вблизи берегов, а в узостях.
Правила корректуры морских навигационных карт. Учет корректуры карт на судне.
В первую очередь необходимо корректировать карты и пособия на район предстоящего плавания. Это должно быть сделано до выхода судна в море. Остальные карты судовой коллекции также необходимо корректировать, но это может быть сделано позже во время плавания. Журнал учёта корректуры» предназначен для систематизации и учёта вносимых на карты изменений. Карты, входящие в судовую коллекцию, отмечаются в «Журнале» и для каждой из них записывается: номер фолио (Стандартной Адмиралтейской системы фолио); дата публикации действующего издания карты; номера извещений, по которым корректировалась карта. Все записи в «Журнале учёта корректуры» должны делаться карандашом, исключение может быть сделано для записи даты издания карты. При выполнении корректуры карт следует придерживаться следующего порядка действий: проверить, не пропущены ли извещения на данную карту (номер последнего предыдущего извещения, указанный в тексте нового извещения и на кальке (tracing), должен совпадать с последним записанным номером в левом нижнем углу карты); нанести новую информацию на карту, используя текст извещения и кальку (tracing); удалить с карты старую информацию, используя текст извещения и кальку (tracing), проверить сделанные исправления; если исправления сделаны верно, записать год (если это первая корректура в этом году) и номер извещения в левом нижнем углу карты. Для правильного изображения символов и нанесения надписей на карты необходимо использовать издание «Символы и условные обозначения Адмиралтейских карт».
Сведения, содержащиеся в предварительных и временных извещениях, а также сведения об изменениях навигационной обстановки, полученные из источников иных чем Адмиралтейские Извещения Мореплавателям (например по Навигационным Предупреждениям), наносятся на карты только карандашом. Номера предварительных и временных извещении записываются в левом нижнем углу карты также карандашом. Когда подобные извещения аннулируются, корректура по ним должна быть стёрта с карт.
Вся остальная корректура части II Еженедельных выпусков Извещений Мореплавателям (постоянные извещения) наносится на карты водостойкими фиолетовыми чернилами. Для удаления информации с карт (её зачёркивания на картах) рекомендуется изограф с толщиной стержня 0.25 мм, а для нанесения информации — стержень 0,15 мм. При удалении информации с карт запрещается стирать или «замазывать» корректором что-либо на карте.
Планирование навигационного использования РЛС на этапе предварительной прокладки пути судна. Параллельная индексация.
Параллельные индексы Современные радиолокационные станции (РЛС) предназначены для обнаружения надводных объектов и берегов в условиях ограни-ченной видимости, определения места судна, обеспечения плавания в узкостях, расхождения со встречными судами. При плавании вдоль побережья или в стесненных водах необходи-мо особо тщательно контролировать движение судна по линии пути. Этот контроль должен включать периодические определения места судна, которые сочетались бы с непрерывным контролем местополо-жения судна относительно заданной линии пути, т.е. контроль смеще-ния судна под воздействием внешних факторов. Метод параллельных индексов дает возможность непрерывного контроля судна относи-тельно линии пути.

При изображении обстановки в относительном движении место судна на экране РЛС неподвижное в центре развертки, а эхо сигналы
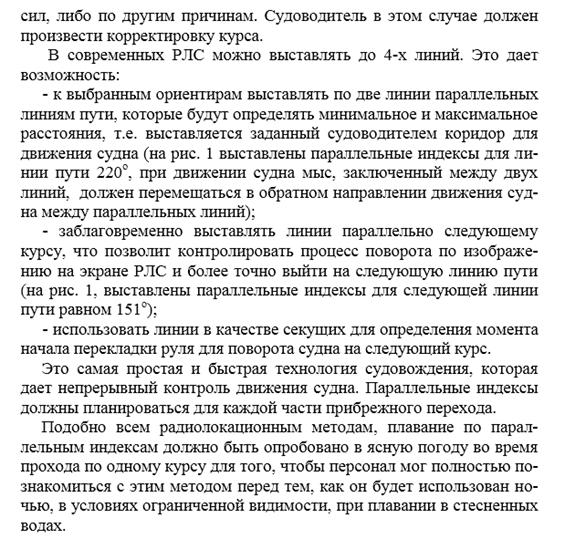
Рис.1. Параллельные индексы на экране РЛС
неподвижных объектов (островов, берегов, буев и т.д.) перемещаются на экране в сторону обратную движению судна, параллельно линии пути и со скоростью равной скорости судна в масштабе экрана.
В режиме относительного движения и ориентации относительно севера используется метод параллельных индексов для непрерывного контроля движения судна. Параллельные индексы – это линии, кото-рые выставляются на экране РЛС параллельно линии пути и на рас-стоянии от центра развертки (судна), равном заданному расстоянию, которое планируется при прохождении ориентира.
Линия, выставленная на экране РЛС, не меняет своего направления
и расстояния относительно центра развертки при смене курса. При движении судна на экране РЛС перемещается ориентир, к которому выставлена линия параллельно курсу и на расстоянии, на котором
планируется его пройти. Если наблюдатель обнаружит на экране РЛС отклонение ориентира от выставленной линии, это означает, что суд-но начинает отклоняться от линии пути под воздействием внешних
сил, либо по другим причинам. Судоводитель в этом случае должен произвести корректировку курса.
В современных РЛС можно выставлять до 4-х линий. Это дает возможность:
— к выбранным ориентирам выставлять по две линии параллельных линиям пути, которые будут определять минимальное и максимальное расстояния, т.е. выставляется заданный судоводителем коридор для движения судна (на рис. 1 выставлены параллельные индексы для ли-нии пути 220о, при движении судна мыс, заключенный между двух линий, должен перемещаться в обратном направлении движения суд-на между параллельных линий);
— заблаговременно выставлять линии параллельно следующему курсу, что позволит контролировать процесс поворота по изображе-нию на экране РЛС и более точно выйти на следующую линию пути (на рис. 1, выставлены параллельные индексы для следующей линии пути равном 151о);
— использовать линии в качестве секущих для определения момента начала перекладки руля для поворота судна на следующий курс.
Это самая простая и быстрая технология судовождения, которая дает непрерывный контроль движения судна. Параллельные индексы должны планироваться для каждой части прибрежного перехода.
Подобно всем радиолокационным методам, плавание по парал-лельным индексам должно быть опробовано в ясную погоду во время прохода по одному курсу для того, чтобы персонал мог полностью по-знакомиться с этим методом перед тем, как он будет использован но-чью, в условиях ограниченной видимости, при плавании в стесненных водах.
Дата добавления: 2015-01-29 ; просмотров: 298 ; Нарушение авторских прав
Как должен выглядеть идеальный Passage Plan в ECDIS
С введением электронных карт появились вопросы, как же должен выглядеть Voyage Plan на ECDIS. И я бы хотел обсудить их и обратить ваше внимание на некоторые нюансы.
Раньше, когда на судах ставили пиратскую версию Transas Navisailor, никого не волновало правильное оформление электронной навигационной прокладки. Рисовали путь, создавая WP, перекидывали информацию о точках в EXCEL, печатали и перекидывали точки на бумажную карту со всем необходимым оформлением.
Сейчас же, ECDIS на многих судах стал официальным навигационным оборудованием и Port State Control, как и всевозможные аудиты с флагами могут попросить показать последний passage plan, в котором уже могут найти замечания, если все сделано на тяп ляп.
1. Линия пути

Да, смешно, но как же это не написать?
В первую очередь необходимо провести путь от А до Я используя всю информацию с лоции и требования капитана. Всё так же, как и с бумажными картами.
2. Проверка вашей прокладки
Есть такая замечательная функция в ECDIS – Route Check или Safety Check, в зависимости какая у вас стоит электронная карта.

Данная функция проверяет весь ваш проделанный млечный путь и выведет на экран замечания, которые необходимо исправить.
Некоторые замечания могут быть абсурдными. Как например на электронной карте MARIS SIMRAD выводятся замечания о входе в Special Area, в моём случае это была зона SECA. И карта сообщает об этом. Что ж, спасибо конечно, может кому-то это и будет полезно. Так же, карта ругалась, если путь проходит через зону военных учений, которые там уже долгое время не проходят.
Подобные замечания можно спокойно скипнуть. А вот на замечания связанные с пересечением shallow contour или land area стоит остановится и исправить. В 95% это будет означать что ваш XTD слишком велик для данной местности и его нужно приуменьшить. В оставшихся 5% этот же XTD наезжает на берег когда судно уже у причала.
После проверки и исправления замечаний подтверждайте навигационную прокладку и переходим к следующему шагу.
3. Параллельное индексирование
Подобное индексирование должно быть отмечено со всех фиксированных объектов на пути с дистанцией до 24 миль. Значит, все фиксированные объекты в радиусе 24 миль от вашего пути помечаем.
Как мы знаем, плавучие объекты в данном случае не учитываются.
И так, мы рисуем линии на карте и помечаем дистанции от навигационной прокладки до них. Это должно выглядеть примерно следующим образом:

4. Зоны NO GO
Да, в ECDISе так же необходимо помечать подобные зоны. Это зоны которые предоставляют опасность для навигации и, в которые нельзя следовать.

На бумажных картах NO GO зоны отмечаются по всей карте. В электронной карте в этом нет никакого смысла. Поэтому необходимо открыть компанейский мануал и поискать там, какие требования у компании к подобному.
Хотя, скорее всего вы этого там не найдёте. Компании не думают обновлять в своих SMS, то что реально необходимо. Куда важнее изменить место под роспись в форме.
В любом случае, спрашивайте у капитана, как он желает видеть NO GO зоны и следуете его приказу.
5. Точка начала поворота
Wheel Over Position помечается на карте при серьезном изменении курса.
Это точка на нашем нынешнем курсе (initial course), в которой необходимо начать изменять курс на следующий с помощью назначенного угла поворота руля.

Как найти необходимый угол поворота руля?
В ECDIS можно все легко прописать и он, конечно, автоматически пометит необходимые точки поворота, а так же Rate of Turn. Это будет выглядеть примерно так:

Если возвращаться к теории, то ROT=Скорость судна/Радиус поворота.
Обычно радиус поворота равен 1 миле.

Но, если мы глянем на наш маневренный буклет судна, то заметим, что судно не сразу слушается руля, а только через какое-то время при определённых условиях.

Когда будем помечать WOP, то учитываем и этот, совершенно маленький нюанс.
Когда рядом с поворот стоит фиксированный объект, то мы, как и с бумажными картами, должны пометить пеленг и дистанцию от WOP до объекта. Вот как наша прокладка должна выглядеть на данный момент:

6. Помечаем Abort Point и Point of no Return.
Abort point – точка возврата. Крайняя точка на прокладке, в которой судно со своей установленной скоростью может развернуться только при помощи поворота руля.
Point of No Return – точка не возврата. Опять же точка, помеченная на прокладке, которая сообщает что судно должно продолжать свой путь только назначенным курсом, так как разворот судна опасен, физически невозможен или слишком сложен.

7. Position Plotting Interval
На каждом плече прокладки необходимо помечать как часто стоит записывать координаты судна.
Всю информацию о PPI берём с SMS. Как правило в открытых водах проверяется позиция судна каждый час. Когда до берега меньше 25 миль, тогда каждые 15 минут. Конечно, никто не будет всю вахту заниматься подобным. Поэтому отталкиваемся от требований капитана.
8. Что еще?
Так же, не забываем записывать следующую информацию в вашем ECDIS:

Как вы могли заметить, идеальная электронная прокладка мало чем отличается от бумажной прокладки. Выполняйте ваши обязанности на высшем уровне и, поверьте, высшее руководство обратит на это внимание.
Средняя оценка 4.6 / 5. Количество оценок 37
Параллельная индексация
Одной из основных предпосылок, предпринимаемых при формулировании подробного плана рейса, является такая — судно будет придерживаться планируемого курса настолько точно, насколько внешние условия (такие как трафик) позволят. Поэтому во время выполнения спланированного рейса, движение судна по предстоящему пути должно внимательно контролироваться и любые отклонения от курса распознаваться и исправляться. Короче говоря, те, кто управляют судном, должны придерживаться курса. Конечно, придерживаться курса является более важной функцией в стеснённых водах, чем в открытых, поэтому мы рассмотрим прием, применяемый во время плавания в стеснённых водах.
Без сомнения вам хорошо рассказывали об умении придерживаться курса. В дополнение, вы, вероятно, предпочитаете определенные приемы и аппаратуру, применяемую в следовании курсу при различных условиях работы, и вы не собираетесь прочитать лекцию по основе судовождения на данном этапе вашей карьеры. Однако в пределах этого курса есть прием судовождения, который заслуживает внимания. Этот прием называется построением параллельного индекса. Некоторые из вас (или все вы) могут использовать, как положено, некоторые аспекты этого приема. Это важный прием и мы здесь выполняем его по двум причинам:
-Построение параллельного индекса позволяет судоводителю непрерывно контролировать положение судна относительно его предстоящего пути и дает возможность воспользоваться в полной мере преимуществами плана рейса.
-Построение параллельного индекса, будучи один раз выполненным, позволяет лицу, не являющемуся напрямую ответственным за судовождение, контролировать положение судна по отношению к предстоящему пути с малыми усилиями или вообще без них. Это является высокоэффективным в организации команды мостика, где ответственность является чертой характера (матрицей) всего персонала на мостике.
Техника приема основывается на том, что при стабилизированном относительном движении на экране, след фиксированного объекта будет двигаться поперек экрана в направлении, которое является точным отображением курса, по которому следует данное судно на скорости, соответствующей скорости судна относительно грунта.
Проведенные параллельные линии по краю указателя пеленга могут быть использованы в качестве вспомогательных при нанесении прямых индекса для дополнения указателя пеленга. Следует помнить, что параллельная индексация — это путь к безопасному судоходству, и она не заменяет требование к определению положения на обычных расстояниях, используя все доступные штурману методы.
При использовании радара для определения положения и контроля, проверьте:
57.общее действие радара;
58.достоверность определенного объекта (-ов);
59.погрешность гироскопа гирокомпаса;
60.точность круга ПКД, визира и курсовой метки.
27.3. Расчет таблицы «WO Position»
Чтобы сделать такую таблицу, используют диаграмму маневренных элементов (ME), на которой в первой четверти окружности циркуляции находят точку касания, соответствующую углу поворота судна. Для малых углов поворота такие таблицы не рассчитывают, зато они весьма полезны для больших изменений курса. Для выполнения табличных расчетов используют транспортир и параллельную линейку, прикладываемых под углом 40 градусов и выше, к первоначальному курсу судна, как к меридиану, и затем их сносят параллельно до касания с кривой окружности. Точки касания будут соответствовать углам поворота. Это выполняют через каждые 10 градусов от 40 до 90. Такие точки определяют упреждение (выдвиг) и прямое смещение (трансфер) для каждого поворота. Графически полученные величины сносят в таблицу. Таких таблиц может быть несколько.
Проверка этой процедуры для судов с винтом левого вращения, а также осуществление расчетов для судов в балласте и с грузом с минимальной и полной скоростью и разными углами перекладки руля являются осуществимыми для судна. Спецификационные таблицы по положению судна должны быть сделаны с коррекцией, основанной на практической циркуляции судна. Таким образом мы получим пригодную таблицу расчетов предварительных поворотов изменяющегося курса судна. После расчета этих параметров важно учесть конструктивные особенности судов, а точнее расстояние между полюсом вращения и глазом наблюдателя на мостике. На судах, где мостик находится на корме (балкера, танкера), такая дистанция может достигать кабельтова.
Расчеты параметров при плавании на течении, влияющим на скорость, определяют с помощью пропорции:
ADV (с): ADV = V (с): V rev
ADV (с) = (ADV X V (с)): V rev.
Образцы таблиц, которые приведены ниже, выполнены с точностью 1/100 масштаба и полностью могут быть применимы практически. Когда судно делает поворот на большой угол, то его путь не всегда будет соответствовать кривой окружности и, следовательно, есть необходимость знать его положение в период поворота.
Но, несмотря на это, наибольшая ценность — это знание места и времени начала перекладки руля. Если кривые циркуляции вправо и влево различны, расчет делают раздельно. Если одинаковы, то можно пользоваться диаграммой одной стороны.
Рекомендуется сделать таблицы раздельно, в грузу и балласте. Это зависит от особенностей судна. Чтобы использовать табличные данные упреждения для вашего водоизмещения, расчитывают прямое смещение и на ее величину сносят параллельно курсу (с которого делают поворот) вспомагательную линию до пересечения с новым курсом. В точке пересечения судно должно быть обязательно. От этой точки прокладываем назад расстояние, равное величине упреждения. Затем в конце дистанций восстанавливаем перпендикуляр до пересечения с начальным курсом. Точка пересечения и будет точкой «\\Ю». Как только вы определили место начала действий, проведите через нее конкретные пеленга или дистанции.
Третья фаза — выполнение. План разработан, обсужден и одобрен. Теперь он принят к исполнению. Это значит, что методы, используемые для выполнения плана, должны быть обеспечены по возможности наилучшими ресурсами. Окончательные подробности должны будут утверждены, когда может быть установлено реальное время перехода. Тактика, необходимая для осуществления плана, затем может быть согласована и должна включать много элементов.
Мониторинг движения судна. Мониторинг удостоверяет, чтосудно продвигается по предопределённому плану перехода, и он является первостепенной функцией вахтенного офицера. Для этого он может быть один, либо иметь поддерживающий вахтенный персонал или действовать в качестве поддержки и источника информации для другого офицера, управляющего судном. Состоит мониторинг из серии функций, анализирующих результаты и действующие на базе таких категорий, как:



