Методы настройки промышленных регуляторов




![]()
![]()
Параметры настройки регуляторов должны быть выбраны такими, чтобы в замкнутой автоматизированной системе регулирования (АСР) был обеспечен заданный запас устойчивости; при этом выбранный показатель качества регулирования должен быть не хуже требуемого (или должен иметь экстремальное значение).
Поскольку в теории автоматического регулирования запас устойчивости может быть оценен по-разному, а также используются различные показатели качества регулирования, в инженерных расчетах применяются несколько методов определения оптимальных параметров настройки регуляторов.
Ниже рассмотрены наиболее распространенные из них.
Формульный метод определения настроек регулятора
В практике наладочных работ широко используют приближенные формулы для определения оптимальных параметров настройки регуляторов. Метод используется для быстрой, приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования. Метод применим как для статических объектов с самовыравниванием (таблица 1), так и для объектов без самовыравнивания (таблица 2).
| Регулятор | Типовой процесс регулирования | ||
| Апериодический | С 20% перерегулированием | Jmin | |
| И |  |  | |
| П |  |  |  |
| ПИ |  |  |  |
| ПИД |  |  |  |

 , (3)
, (3)
где Kp – коэффициент усиления регулятора;
Tи – постоянная интегрирования регулятора;
Tд – постоянная дифференцирования.
Таблица 2 – Формульный метод определения настроек регулятора для статических объектов без самовыравнивания.
| Регулятор | Типовой процесс регулирования | ||
| Апериодический | С 20% перерегулированием |  | |
| П |  |  | — |
| ПИ |  |  |  |
| ПИД |  |  |  |
Оптимальная настройка регуляторов по номограммам
В отличие от формульного метода, метод расчета по номограммам позволяет более точно определить настройки регулятора, т.к. учитывает наличие нелинейной зависимости между параметрами настройки регулятора и величиной отношения τ/Т.
Существуют номограммы для расчета настроек ПИ- и ПИД-регуляторов для объектов первого и второго порядков с запаздыванием.
Номограмма для настроек ПИ-регулятора представлена на рисунке 12.
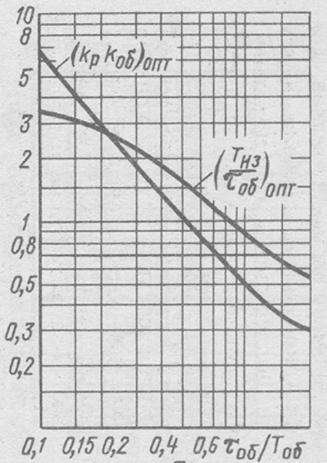
Рис. 12 – Номограмма для расчета настроек ПИ-регулятора.
Предположим, что объект управления описывается звеном первого порядка с запаздыванием, а оптимальный процесс регулирования – это процесс с 20%-ным перерегулированием. Следует иметь в виду, что современные электронные и микропроцессорные регуляторы реализуют ПИ- и ПИД-законы регулирования с зависимыми настройками, а пневматические регуляторы – с независимыми настройками вида
 . (4)
. (4)
Дифференциальная составляющая промышленных регуляторов обычно реализуется в виде
 , (5)
, (5)
где Kpд – коэффициент усиления регулятора по дифференциальной составляющей (выбирается в диапазоне 1 – 10);
Tf – постоянная времени фильтра.
Эти параметры определяются из соотношения
 . (6)
. (6)
Чем выше уровень помех в выходном сигнале объекта, тем меньше рекомендуется брать величину Kpд. Это будет способствовать уменьшению величины средней квадратичной ошибки регулирования.
Расчет настроек по частотным характеристикам объекта
Существует специальная аппаратура для экспериментального определения амплитудно-фазовой характеристики АФХ объекта управления. Эту характеристику можно использовать для расчета настроек ПИ-регулятора, где главным критерием является обеспечение заданных запасов устойчивости в системе.
Запасы устойчивости удобно характеризовать показателем колебательности системы M, величина которого в системе с ПИ- регулятором совпадает с максимумом амплитудно-частотной характеристики замкнутой системы. Для того чтобы этот максимум не превышал заданной величины, АФХ разомкнутой системы не должна заходить внутрь окружности с центром P0 и радиусом R, где
 ,
,  . (7)
. (7)
Можно доказать, что оптимальными, по минимуму среднеквадратичной ошибки регулирования настройками будут такие, при которых система с показателем колебательности М ≤ Мз будет иметь наибольший коэффициент при интегральной составляющей, чему соответствует условие Kp / Tи → min.

В связи с этим расчет оптимальных настроек состоит из двух этапов:
1. Нахождение в плоскости параметров Kp и Tи границы области, в которой система обладает заданным показателем колебательности Мз.
2. Определением на границе области точки, удовлетворяющей требованию Kp / Tи → min.
Методика расчета настроек ПИ регулятора по АФХ объекта
1. Строится семейство амплитудно-фазовых характеристик разомкнутой системы при Kp = 1 и различных значениях Tij (5-6 значений).
 . (8)
. (8)
2. Задаются значением показателя колебательности M, из диапазона 1.55 ≤ M ≤ 2.3 (рекомендуется М = 1.6). Из начала координат проводят прямую OE под углом
 , (9)
, (9)
3. Строится семейство окружностей, касающихся АФХ0j прямой OE под углом β, причем центр окружностей все время лежит на отрицательной действительной оси. В результате построения определяются радиусы этих окружностей Rj.
4. Для каждой окружности вычисляют предельное значение Kp .
5. По значениям Kpj и Kij строят границу области заданного показателя колебательности.
6. На этой границе определяют точку, для которой отношение Kp / Tи максимально.
Экспериментальные методы настройки регулятора
Для значительного числа промышленных объектов управления отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики. В то же время, проведение экспериментов по снятию этих характеристик весьма дорого и трудоемко. Экспериментальный метод настройки регуляторов не требуют знания математической модели объекта. Однако предполагается, что система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора.
Метод незатухающих колебаний
В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (Tи = ∞, Tд = 0), т.е. система переводится в П-закон регулирования. Путем последовательного увеличения Kp с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом Kkp. Это соответствует выведению системы на границу колебательной устойчивости.
При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора Kkp и периода критических колебаний в системе Tkp. При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям Kkp и Tkp рассчитываются параметры настройки регулятора:
Расчет настроек регулятора можно производить по критической частоте собственно объекта управления ωkp. Учитывая, что собственная частота ωkp объекта управления совпадает с критической частотой колебаний замкнутой системы с П-регулятором, величины Kkp и Tkp могут быть определены по амплитуде и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводиться на критический режим работы.
Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором, путем последовательного увеличения Kp добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D = 1/4.
Далее определяется период этих колебаний Tк и значения постоянных интегрирования и дифференцирования регуляторов Tи и Tд
После установки вычисленных значений Tи и Tд на регуляторе необходимо экспериментально уточнить величину Kp для получения декремента затухания D = 1/4. С этой целью производится дополнительная подстройка Kp для выбранного закона регулирования, что обычно приводит к уменьшению Kp на 20 ÷ 30%. Аналогичный метод настройки используется в адаптивных регуляторах американской фирмы «Фоксборо».
Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
В настоящее время разработан новый метод настройки замкнутых систем управления, основанный на подаче пробных синусоидальных колебаний на вход регулятора. По амплитуде и фазе колебаний выходного сигнала объекта управления осуществляется расчет настроек ПИ-регулятора, исходя из условия обеспечения заданного показателя колебательности M и максимума отношения Kp / Tи.
Настройка ПИД-регуляторов: так ли страшен чёрт, как его малюют? Часть 1. Одноконтурная система

Эта статья открывает цикл статей, посвященных автоматизированным способам настройки ПИД-регуляторов в среде Simulink. Сегодня разберемся, как работать с приложением PID Tuner.
Введение
Наиболее популярным типом применяемых в промышленности регуляторов в системах управления замкнутыми системами можно считать ПИД-регуляторы. И если структуру и принцип действия контроллера инженеры помнят еще со студенческой скамьи, то его настройка, т.е. расчет коэффициентов регулятора, до сих пор является проблемой. Существует огромное количество литературы, как зарубежной (например, [1, 2]), так и отечественной (например, [3, 4]), где настройка регуляторов объясняется на достаточно непростом языке теории автоматического управления.
В этой серии статей будут описываться автоматизированные способы настройки ПИД-регуляторов с помощью инструментов среды Simulink, таких как:
В качестве объекта системы управления будет выступать электропривод на базе двигателя постоянного тока с возбуждением от постоянных магнитов, работающий совместно с редуктором на инерционную нагрузку, со следующими параметрами:
Параметры нагрузки и редуктора:
Статьи практически не содержат математических формул, однако желательно, чтобы читатель обладал базовыми знаниями в теории автоматического управления, а также имел опыт моделирования в среде Simulink для понимания предлагаемого материала.
Модель системы
Рассмотрим линейную систему управления угловой скоростью следящего электропривода, упрощенная структурная схема которой представлена ниже.
В соответствии с приведенной структурой в среде Simulink была построена модель такой системы.
Модели электропривода (подсистема Electric actuator) и инерционной нагрузки (подсистема Load) созданы с помощью блоков библиотеки физического моделирования Simscape:
Модели электропривода и нагрузки также включают подсистемы датчиков различных физических величин:
Перед настройкой параметров ПИД-регулятора запустим модель на расчет, приняв передаточную функцию регулятора  . Результаты моделирования при отработке входного сигнала 150 об/мин показаны ниже.
. Результаты моделирования при отработке входного сигнала 150 об/мин показаны ниже.
Из анализа приведенных графиков видно, что:
Пусть реакция системы на единичный импульс должна соответствовать следующим требованиям:
Кроме того, регулятор должен ограничивать напряжение, подаваемое на обмотку двигателя, до значения напряжения питания.
Настраиваем контроллер
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен непосредственно в окне параметров блока PID Controller.
Приложение запускается нажатием на кнопку Tune…, расположенную на панели Automated tuning. Стоит отметить, что до выполнения этапа настройки параметров контроллера необходимо выбрать его вид (П, ПИ, ПД и др.), а также его тип (аналоговый или дискретный).
Поскольку одним из требований является ограничение его выходной координаты (напряжения на обмотке двигателя), то следует задать допустимый диапазон напряжений. Для этого:
Корректная работа блока регулятора в составе системы предполагает использования методов, направленных на борьбу с интегральным насыщением. В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
Можно заметить, что внешний вид блока регулятора изменился: появился знак насыщения рядом с выходным портом блока.
Далее, приняв все изменения нажатием кнопки Apply, возвращаемся во вкладку Main и нажимаем кнопку Tune…, в результате чего откроется новое окно приложения PIDTuner.
В графической области окна отображаются два переходных процесса: при текущих параметрах регулятора, т.е. для ненастроенного регулятора, и при значениях, подобранных автоматически. Новые значения параметров можно посмотреть, нажав на кнопку Show Parameters, расположенную на панели инструментов. При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
Как видно из значений второй таблицы, автоматически рассчитанные коэффициенты регулятора удовлетворяют всем требованиям.
Настройка регулятора завершается нажатием на кнопку с зеленым треугольником, расположенной справа от кнопки Show Parameters, после чего новые значения параметров автоматически изменятся в соответствующих полях в окне настройки параметров блока PID Controller.
Результаты моделирования системы с настроенным регулятором для нескольких входных сигналов показаны ниже. При больших уровнях входных сигналов (голубая линия) система будет работать в режиме с насыщением по напряжению.
Отметим, что инструмент PID Tuner подбирает коэффициенты регулятора по линеаризованной модели, поэтому при переходе к нелинейной модели требуется уточнять его параметры. В этом случае можно воспользоваться приложением Response Optimizer.
ПИД-регулятор. Методика настройки
2020-07-10  Промышленное
Промышленное  12 комментариев
12 комментариев
ПИД-регулятор (пропорционально-интегрально-дифференциальный) — устройство, с обратной связью, применяемое в автоматических системах управления для поддержания заданного значения параметра. Благодаря своей универсальности они широко применяются в различных технологических процессах.

Выходной сигнал регулятора определяется по следующей формуле:
u (t) = P + I + D = Kp e (t) + Ki ∫e (t) dt + Kd de (t)/dt
u (t) – выходной сигнал регулятора;
P – пропорциональная составляющая;
I – интегрирующая составляющая;
D – дифференцирующая составляющая;
Ki — интегральный коэффициент
Kd – дифференциальный коэффициент
e (t) – ошибка рассогласования
Задачи ПИД-регулятора в системах АСУ ТП
Основная задача ПИД регулятора состоит в поддержании определенного значения параметра технологического процесса на заданном уровне. То есть говоря простым языком, задача ПИД-регулятора заключается в том, чтобы учитывая полученные значения с датчиков (обратная связь) воздействовать на объект управления, плавно подводя регулируемое значение к заданным уставкам. Применение ПИД регуляторов целесообразно, а зачастую и единственно возможно в процессах, где необходима высокая точность переходных процессов, непрерывный контроль и регулирование заданных параметров, недопустимы значительные колебания в системе.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Составляющие ПИД-регулятора
В стандартном ПИД-регуляторе есть три составляющие и каждая из них по своему воздействует на управление.
Пропорциональная — P (t) = Kp * e (t)
Учитывает величину рассогласования заданного значения и фактического. Чем больше отклонения значения, тем больше будет выходной сигнал, то есть пропорциональная составляющая пытается компенсировать эту разницу.
Однако пропорциональный регулятор не способен компенсировать полностью ошибку рассогласования. Всегда будет присутствовать так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. При увеличении коэффициента пропорциональности Kp статическая ошибка уменьшается, но могут возникнуть автоколебания и снижение устойчивости системы.
Интегральная – I (t) = Ki ∫e (t) dt
Интегральная составляющая используется для устранения статической ошибки. Она складывает значение предыдущих ошибок рассогласования и компенсирует их, можно сказать, что учится на предыдущих ошибках. То есть ошибка рассогласования умножается на коэффициент интегрирования и прибавляется к предыдущему значению интегрирующего звена. При выходе системы на заданный режим, интегральная составляющая перестает изменяться и не оказывает какого-либо серьезного воздействия на систему. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами c большой чувствительностью.
Дифференциальная – D (t) = Kd de (t)/dt
Дифференциальная составляющая учитывает скорость изменения регулируемой величины, противодействуя предполагаемым отклонениям, вызванными возмущениями системы или запаздыванием. И чем больше будет величина отклоняться от заданной, тем сильнее будет противодействие, оказываемое дифференциальной составляющей. То есть она предугадывает поведение системы в будущем. При достижении величины рассогласования постоянного значения дифференциальная составляющая перестает оказывать воздействие на управляющий сигнал.
На практике какая-либо из составляющих может не использоваться (чаще всего Д-дифференциальная) и тогда мы получаем П-регулятор, ПИ-регулятор.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)

Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.
3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Вывод
Благодаря достаточно высоким получаемым результатам ПИД-регуляторы нашли широкое применение в системах автоматического управления.
При этом важно подчеркнуть, что настройка ПИД-регулятора является процессом довольно трудоемким и требует определенных знаний и индивидуального подхода для различных объектов управления.



