Принцип работы и основы программирования ПЛК
Программируемые логические контроллеры (ПЛК)
До появления твердотельных логических схем разработка систем логического управления основывались на электромеханических реле. По сей день реле не устарели в своем предназначении, но все же в некоторых своих прежних функциях они заменены контроллером.
В современной промышленности существует большое количество различных систем и процессов, требующих автоматизации, но теперь такие системы редко проектируются из реле. Современные производственные процессы нуждаются в устройстве, которое запрограммировано на выполнение различных логических функций.
В конце 1960-х годов американская компания «Bedford Associates» разработала компьютерное устройство, названное MODICON (Modular Digital Controller). Позже название устройства стало названием подразделения компании, спроектировавшей, сделавшей и продавшей его.
Другие компании разработали собственные версии этого устройства, и, в конце концов, оно стало известно как ПЛК, или программируемый логический контроллер. Целью программируемого контроллера, способного имитировать работу большого количества реле, была замена электромеханических реле на логические элементы.

ПЛК имеет набор входных клемм, с помощью которых можно контролировать состояние датчиков и выключателей. Также имеются выходные клеммы, которые сообщают «высокий» или «низкий» сигнал индикаторам питания, электромагнитным клапанам, контакторам, небольшим двигателям и другим самоконтролируемым устройствам.
ПЛК легки в программировании, так как их программный язык напоминает логику работы реле. Так обычный промышленный электрик или инженер-электрик, привыкший читать схемы релейной логики, будет чувствовать себя комфортно и при программировании ПЛК на выполнение тех же функций.
Подключение сигналов и стандартное программирование несколько отличаются у разных моделей ПЛК, но они достаточно схожи, что позволяет разместить здесь «общее» введение в программирование этого устройства.
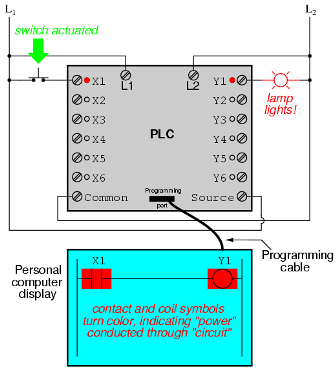
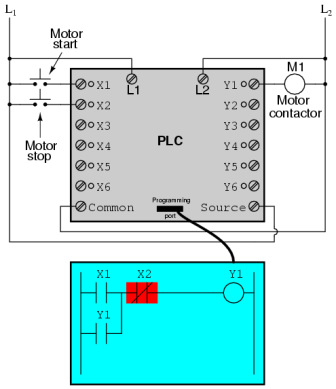
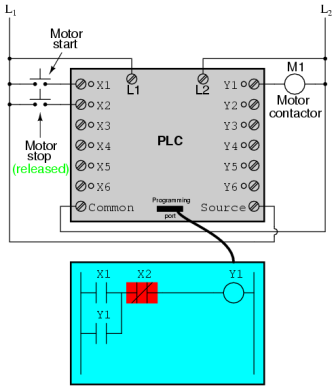
Следующая иллюстрация показывает простой ПЛК, а точнее то, как он может выглядеть спереди. Две винтовые клеммы, обеспечивающие подключение для внутренних цепей ПЛК напряженим до 120 В переменного тока, помечены L1 и L2.
Шесть винтовых клемм, расположенных с левой стороны, обеспечивают подключение для входных устройств. Каждая клемма представляет свой входной канал (Х). Винтовая клемма («общее» подключение ) расположенная в левом нижнем углу обычно подключается к L2 (нейтральная) источника тока напряжением 120 В переменного тока.
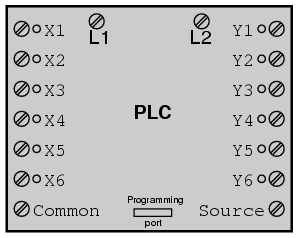
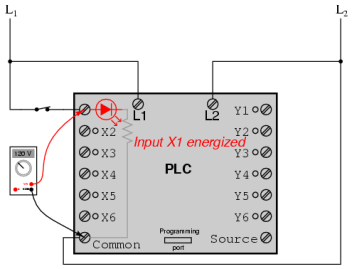
Внутри корпуса ПЛК, связывающего каждую входную клемму с общей клеммой, находится оптоизолятор устройства (светодиод), который обеспечивает электрически изолированный «высокий» сигнал для схемы компьютера ( фототранзистор интерпретирует свет светодиода), когда 120-тивольтный переменный ток устанавливается между соответствующей входной клеммой и общей клеммой. Светодиод на передней панели ПЛК дает возможность понять, какой вход находится под напряжением:
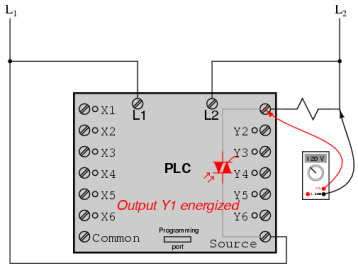
Выходные сигналы генерируются компьютерной схемотехникой ПЛК, активируя переключающее устройство (транзистор, тиристор или даже электромеханическое реле) и связывая клемму «Источник» (правый нижний угол) с любым помеченным буквой Y выходом. Клемма «Источник» обычно связывается с L1. Так же, как и каждый вход, каждый выход, находящий под напряжением, отмечается с помощью светодиода:
Таким образом, ПЛК может подключаться к любым устройствам, таким как переключатели и электромагниты.
Основы программирования ПЛК
Современная логика системы управления установлена в ПЛК посредством компьютерной программы. Эта программа определяет, какие выходы находятся под напряжением и при каких входных условиях. Хотя сама программа напоминают схему логики реле, в ней не существует никаких контактов переключателя или катушек реле, действующих внутри ПЛК для создания связей между входом и выходом. Эти контакты и катушки мнимые. Программа пишется и просматривается с помощью персонального компьютера, подключенного к порту программирования ПЛК.
Рассмотрим следующую схему и программу ПЛК:
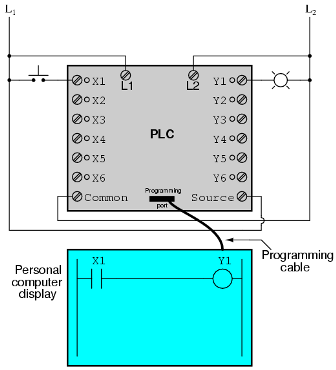
Когда кнопочный переключатель не задействован (находится в не нажатом состоянии), сигнал не посылается на вход Х1. В соответствие с программой, которая показывает «открытый» вход Х1, сигнал не будет посылаться и на выход Y1. Таким образом, выход Y1 останется обесточенным, а индикатор, подключенный к нему, погасшим.
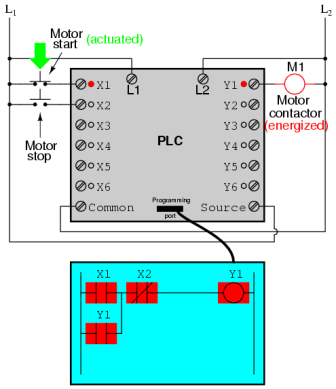
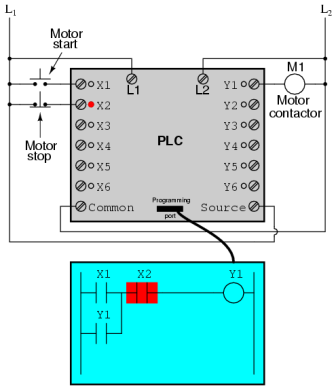
Если кнопочный переключатель нажат, сигнал будет отправлен к входу Х1. Все контакты Х1 в программе примут активированное состояние, как будто они являются контактами реле, активированными посредством подачи напряжения катушке реле, названной Х1. В этом случае открытый контакт Х1 будет «закрыт» и отправит сигнал к катушке Y1. Когда катушка Y1 будет находиться под напряжением, выход Y1 осветится лампочкой, подключенной к нему.
Не менее важно понять, что компьютер, используемый для написания и редактирования программы, не нужен для дальнейшего использования ПЛК. После того, как программа была загружена в программируемый контроллер, компьютер можно отключить, и ПЛК самостоятельно будет выполнять программные команды. Мы включаем монитор персонального компьютера в иллюстрации для того, чтобы вы поняли связь между реальными условиями (замыкание переключателя и статусы лампы) и статусы программы (сигналы через виртуальные контакты и виртуальные катушки).
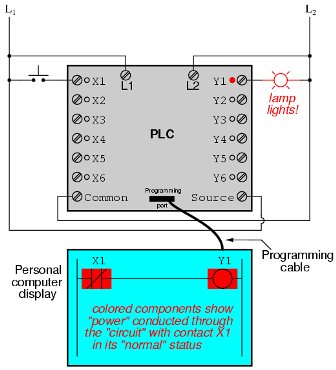
Истинная мощь и универсальность ПЛК раскрывается, когда мы хотим изменить поведение системы управления. Поскольку ПЛК является программируемым устройством, мы можем изменить, команды, которые мы задали, без перенастройки компонентов, подключенных к нему. Предположим, что мы решили функцию «переключатель – лампочка» перепрограммировать наоборот: нажать кнопку, чтобы выключить лампочку, и отпустить ее, чтобы включить.
Решение такой задачи в реальных условиях заключается в том, что выключатель, «открытый» при нормальных условиях, заменяется на «закрытый». Программное ее решение – это изменение программы так, чтобы контакт Х1 при нормальных условиях был «закрыт», а не «открыт».
На следующем изображении вы увидите уже измененную программу, при не активизированном переключателе:
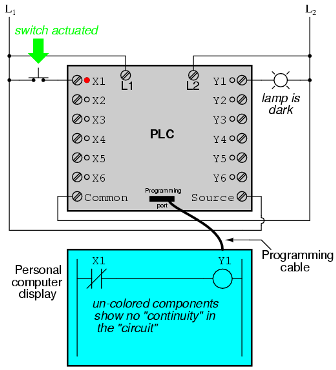
А здесь переключатель активизирован:
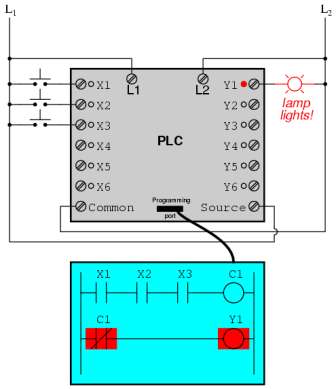
Одним из преимуществ реализации логического контроля в программном обеспечении, в отличие от контроля с помощью оборудования, является то, что входные сигналы могут быть использованы такое количество раз, какое потребуется. Например, рассмотрим схему и программу, разработанной для включения лампочки, если хотя бы два из трех переключателей активизированы одновременно:
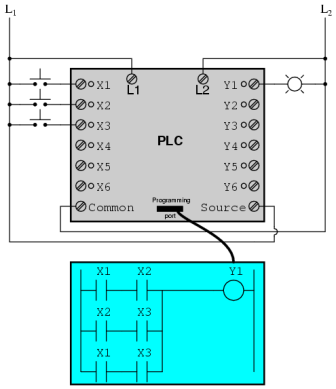
Чтобы построить аналогичную схему, используя реле, потребуются три реле с двумя открытыми контактами при нормальных условиях, каждый из которых должен быть использован. Однако используя ПЛК, мы можем без добавления дополнительного оборудования запрограммировать столько контактов для каждого «Х» входа, сколько нам хотелось бы (каждый вход и выход должен занимать не больше, чем 1 бит в цифровой памяти ПЛК) и вызывать их столько раз, сколько необходимо.
Кроме того, так как каждый выход ПЛК занимает не более одного бита в его памяти, мы можем вносить контакты в программу, приводя Y выход в не активизированное состояние. Для примера возьмем схему двигателя с системой контроля начала движения и остановки:
Если нажать кнопку «Старт», то по «закрытому» контакту Х1 пройдет ток ток и он отправит 120 В переменного токак к контактору двигателя. Параллельный контакт Y1 также «закроется», тем самым замкнув цепь:
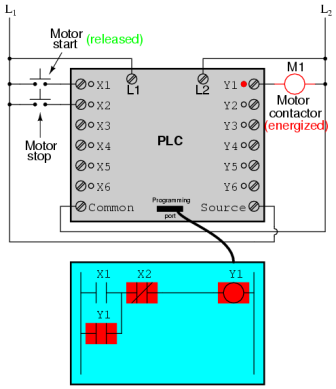
Если мы теперь нажмем кнопку «Старт», контакт Х1 перейдет в «открытое» состояние, но двигатель будет продолжать работать, потому что замкнутый контакт Y1 все еще будет держать катушку под напряжением:
Чтобы остановить двигатель, нужно быстро нажать кнопку «Стоп», которая сообщит напряжение входу Х1 и «открытому» контакту, что приведет к прекращению подачи напряжения к катушке Y1:
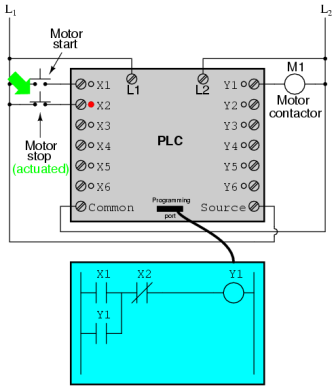
Когда вы нажали кнопку «Стоп», вход Х1 остался без напряжения, вернув тем самым контакт Х1 в его нормальное «закрытое» состояние. Двигатель ни при каких условиях не станет работать снова, пока вы снова не нажмете кнопку «Старт», потому что печать в контакте Y1 была потеряна:
Очень важна отказоустойчивая модель устройств контроля ПЛК, так же, как и в устройствах контроля электромеханического реле. Нужно всегда учитывать влияние ошибочно «открытого» контакта на работу системы. Так, например, в нашем случае, если контакт Х2 будет ошибочно «открыт», то не будет никакой возможности остановить двигатель!
Решением этой проблемы является перепрограммирование контакта Х2 внутри ПЛК и фактическое нажатие кнопки «Стоп»:
Когда кнопка «Стоп» не нажата, вход ПЛК Х2 находится под напряжением, т.е. контакт Х2 «закрыт». Это позволяет двигателю начать работу, когда контакту Х1 сообщается ток, и продолжать работу, когда кнопка «Старт» отпущена. Когда вы нажимаете кнопку «Стоп», контакт Х2 переходит в «открытое» состояние и двигатель прекращает работу. Таким образом, вы можете увидеть, что функциональной разницы между этой и предыдущей моделью нет.
Тем не менее, если входной контакт Х2 был ошибочно «открыт», вход Х2 может быть остановлен нажатием кнопки «Стоп». В результате двигатель немедленно отключается. Эта модель безопаснее, чем предыдущая, где нажатие кнопки «Стоп» сделает невозможным остановку двигателя.
В дополнение к входам (Х) и выходам (Y) в ПЛК есть возможность использовать «внутренние контакты и катушки. Они используются так же, как и промежуточные реле, применяемые в стандартных релейных схемах.
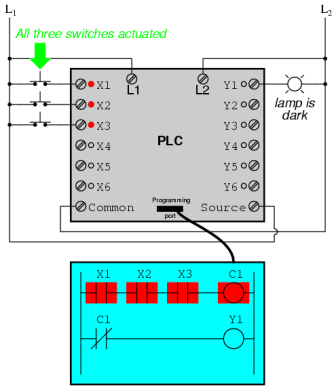
Чтобы понять принцип работы «внутренних» схем и контактов, рассмотрим следующую схему и программу, разработанную по принципу трех входов логической функции AND:
В данной схеме, лампа горит, до тех пора пока какая-либо из кнопок не нажата. Для того чтобы выключить лампу следует нажать все три кнопки:
В этой статье, посвященной программируемым логическим контроллерам, иллюстрирована лишь небольшая выборка их возможностей. Как компьютер ПЛК может выполнять и другие расширенные функции с гораздо большей точностью и надежностью, чем при использовании электромеханических логических устройств. Большинство ПЛК имеют больше шести входов и выходов. Следующая иллюстрация показывает один из ПЛК компании Allen-Bradley:

С модулями, каждый из которых имеет 16 входов и выходов, этот ПЛК имеет возможность управлять десятком устройств. Помещенный в шкаф управления ПЛК занимает мало места (для электромеханических реле, выполняющих те же функции, понадобилось бы гораздо больше свободного пространства).

Structured Text
Книга «Изучаем Structured Text МЭК 61131-3»: Ссылка на книгу
Программируемые логические контроллеры
Структура и устройство ПЛК
С чего начиналась промышленная автоматика? А начиналось все с контактно-релейных схем управления промышленными процессами. Кроме жуткого «шелестения», контактно релейные схемы имели фиксированную логику работы, и в случае изменения алгоритма, необходимо основательно переделать монтажную схему
Бурное развитие микропроцессорной техники, привели к созданию систем управления технологическими процессами на базе промышленных контроллеров. Но это не означает, что реле изжили себя, у них просто своя ниша для применения.
ПЛК – программируемый логический контроллер, представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени.

Принцип работы ПЛК несколько отличается от «обычных» микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть это системное программное обеспечение. Проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, взаимосвязи составляющих частей, внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. ПЛК работают циклически по методу периодического опроса входных данных.
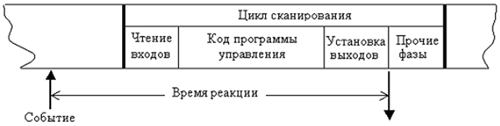
Рабочий цикл ПЛК включает 4 фазы:
1. Опрос входов
2. Выполнение пользовательской программы
3. Установку значений выходов
4. Некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.).
Выполнение 1 фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной программе, той программе, которую вы сами записали в память, по этой программе контроллер делает то что вы пожелаете, а по ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами. Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах
Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рисунке:
Обладая памятью, ПЛК в зависимости от предыстории событий, способен реагировать по-разному на текущие события. Возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень в отличие от простых комбинационных автоматов.
Рассмотрим входа и выхода ПЛК. Существует три вида входов дискретные, аналоговые и специальные
Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. Все дискретные входы (общего исполнения) контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА.
Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т. д.
Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля.
Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например, требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов.
Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот – поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. Здесь желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать, необходимые для прикладной задачи величины.
Вторым распространенным типом специализированных входов являются входы способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы – входы прерываний.
Дискретный выход также имеет два состояния – включен и выключен. Они нужны для управления: электромагнитных клапанов, катушек, пускателей, световые сигнализаторы и т.д. В общем сфера их применения огромна, и охватывает почти всю промышленную автоматику.
Конструктивно ПЛК подразделяются на моноблочные, модульные и распределенные. Моноблочные имеют фиксированный набор входов выходов

В модульных контроллерах модули входов – выходов устанавливаются в разном составе и количестве в зависимости от предстоящей задачи

В распределенных системах модули или даже отдельные входа-выхода, образующие единую систему управления, могут быть разнесены на значительные расстояния
Языки программирования ПЛК
При создании системы управления технологического процесса, всегда существует проблема по взаимопониманию программиста и технологов. Технолог скажет «нам надо немного подсыпать, чуть подмешать, еще подсыпать и чуть нагреть». И мало когда следует ждать от технолога формализованного описания алгоритма. И получалось так, что программисту нужно долго вникать в тех. Процесс, потом писать программу. Зачастую при таком подходе программист остается единственным человеком, способным разобраться в своем творении, со всеми вытекающими отсюда последствиями. Такая ситуация породила стремлении создание технологических языков программирования, доступные инженерам и технологам и максимально упрощающим процесс программирования
За последнее десятилетие появилось несколько технологических языков. Более того, Международной Электротехнической Комиссией разработан стандарт МЭК-61131-3, концентрирующий все передовое в области языков программирования для систем автоматизации технологических процессов. Этот стандарт требует от различных изготовителей ПЛК предлагать команды, являющиеся одинаковыми и по внешнему виду, и по действию.
Стандарт специфицирует 5 языков программирования:
Язык LAD или KOP (с немецкого Kontaktplan) похожи на электрические схемы релейной логики. Поэтому инженерам не знающим мудреных языков программирования, не составит труда написать программу. Язык FBD напоминает создание схем на логических элементах. В каждом из этих языков есть свои минусы и плюсы. Поэтому при выборе специалисты основываются в основном на личном опыте. Хотя большинство программных комплексов дают возможность переконвертировать уже написанную программу из одного языку в другой. Так как некоторые задачи изящно и просто решаются на одном языке, а на другом придется столкнуться с некоторыми трудностями
Наибольшее распространение в настоящее время получили языки LAD, STL и FBD.
Большинство фирм изготовители ПЛК традиционно имеют собственные фирменные наработки в области инструментального программного обеспечения. Например такие как «Concept» Schneider Electric, «Step 7» Siemens.
Программный комплекс CoDeSys
Открытость МЭК стандартов привели к созданию фирм занимающихся исключительно инструментами программирования ПЛК.
Наибольшей популярностью в мире пользуются комплекс CoDeSys. CoDeSys разработан фирмой 3S. Это универсальный инструмент программирования контроллеров на языках МЭК, не привязанной к какой-либо аппаратной платформе и удовлетворяющим всем современным требованиям.
Основные особенности:
— полноценная реализация МЭК языков
— встроенный эмулятор контроллера позволяет проводить отладку проекта без аппаратных средств. Причем эмулируется не некий абстрактный контроллер, а конкретный ПЛК с учетом аппаратной платформы
— встроенные элементы визуализации дают возможность создать модель объекта управления и проводить отладку, т.е. дает возможность создавать человеко-машинного интерфейса (HMI)
— очень широкий набор сервисных функции, ускоряющий работу программиста
— существует русская версия программы, и русская документация
Литература:
Современные технологии промышленной автоматизации: учебник / О. В. Шишов. Саранск : Изд-во Мордов. ун-та, 2007. – 273 с. ISBN 5-7103-1123-5
Программируемый логический контроллер и его применение
Любое промышленное оборудование, способное выполнять автономно какие-либо операции, имеют в своем устройстве контроллер.
ПЛК – что это такое?
Структура и устройство ПЛК
Контроллер можно образно предоставить в формате мини-компьютера, но очень компактного и с особенностями. ПЛК, как и ПК, состоят из оперативной памяти, процессора, вспомогательного периферийного оборудования. Однако, дело еще и в том, что промышленные контроллеры должны выполнять не только расчетные задачи, как ПК, но и заниматься сбором информации от массы устройств – это датчики, сенсоры. Также контроллер и выдают сигналы в цепи.
Сейчас выпускаются контроллеры в различных форм-факторах. Это:
Первые модели встречаются очень часто, однако, они рассчитаны на эксплуатацию в малых объектах и системах, где нужно обрабатывать малое количество сигналов.
Второй вид контроллеров используют в промышленности гораздо шире – производства с полнофункциональными АСУ требуют значительно большего числа сигналов, которые требуется обрабатывать. Если производство масштабное, то удобнее разнести модули вводы вывода по территории с объединением в единую сеть, которая подчиняется отдельному логическому контроллеру. Такие сети называют полевыми сетями или fieldbus. К этой седи подключаются датчики, исполнительные системы, которые являются интеллектуальными, так как имеют эту возможность.
Существует масса видов полевых сетей. Стандарт IEC61158 (МЭК61158) включает в себя 8 видов сетей. А до введения этого стандарта каждый производитель придумывал и использовал свою полевую сеть.
В структуре ПЛК имеется базовые компоненты:
Процессорный модуль оснащен встроенной памятью. Имеются разъемы для программатора, удаленных устройств, для подключения к сетям. Питание реализовано в виде отдельного блока. Модули могут быть дискретными либо аналоговыми.
В зависимости от того, сколько каналов для ввода и вывода и какой тип процессора, модули ввод/вывод могут быть установлены на одном шасси с ЦП или на нескольких. До конца 80-х годов модули для ввода и вывода данных располагались отдельно от процессора. В стандартном контроллере современного типа модуль входов и выходов находится на одном шасси с микропроцессором. Некоторые ПЛК позволяют устанавливать более одного микропроцессора.
Принцип действия ПЛК
В отличие от микропроцессорной техники принцип действия ПЛК немного другой. Софт делится на две части. Первая часть представляет собой блок системных программ. Если провести аналогию с ПК, то системное ПО контроллера выступает в роли операционной системы, ответственной за работу низкоуровневых процессов. Системная часть ПО устанавливается в постоянной памяти в любой момент вступает в работу.
Когда ПЛК включается, то уже через мгновение запускается операционная система. Выполнение пользовательской программы циклическое. Цикл работы состоит из четырех фаз:
Первая фаза цикла полностью обеспечивается системным ПО управления ПЛК. Затем управление берет на себя прикладное ПО – созданный оператором алгоритм. По данной программе контроллер будет выполнять то, что от него хотят. По завершению выполнения этих команд работа опять передается системному ПО. Процесс составления управляющей прикладной программы ПЛК максимально упрощен – программист не должен задумываться, как управлять аппаратными возможностями. Оператор лишь должен указать, какой сигнал будет на входе и как нужно на него реагировать на выходе.
Входы и выходы
В любом контроллере реализованы входы трех типов – дискретные, аналоговые, специальные.
Дискретный вход
Если состояние приборов не удается описать в 1 бит, тогда для работы такого оборудования применяют несколько дискретных входов.
Системное ПО обязательно оснащено драйвером. Он считает физические значения каждого входа в ОЗУ. За счет этого программистам нет нужды понимать, как устроен контролер внутри. Дискретный вход – биты, которые можно читать и изменять из оперативной памяти устройства.
Аналоговый вход
Специальный вход
Обыкновенные входы способны удовлетворить практически все нужды. Необходимость в в спец. входах появляется при трудностях в обработке сигналов.
ПЛК оснащены специализированными входами, позволяющие измерять длительность, фиксировать фронты, подсчитывать импульсы. К примеру, для определения положения валов, используют датчики, способные выдавать импульсы на один оборот. Частота может быть очень высокой. Даже на мощных процессорах процесс занимает много времени. В таких ситуациях и нужны спец. входы, способные первично обрабатывать информацию.
Второй тип таких входов – это входы, которые могут мгновенно запускать команды пользователей с прерываниями на выполнения основного ПО.
Дискретный выход
С одним выходом можно коммутировать только один сигнал. В качестве нагрузки на выходы могут использоваться различные исполнительные устройства.
Типы ПЛК
Устройства квалифицируются следующим образом:
По числу каналов для ввода/вывода ПЛК делят на классы:
По тому, как располагаются модули, контроллеры различают на:
По способу монтажа промышленные контроллеры можно разделить на:
По языкам программирования выделяют модели, программируемые на языке ПЛК систем МЕК 61131-3 и на классический языках, таких как С, C#, Visual Basic, Scala.
Ограничения ПЛК
ПЛК, как и любая цифровая техника имеет ограничения. Устройства ограничены:
Также в моделях ограничено время срабатывания и на восстановление после сбоев.
Место программируемого логического контроллера в системе управления
Устройства установлены в самых нижних звеньях АСУ ТП. ПЛК – это первый шаг в строительстве АСУ. Автоматизация дает очень рост экономики, позволяет существенно повысить качество производства, избежать чрезмерно тяжелой либо рутинной работы.
Назначение переменных в ПЛК
Как и в любом языке программирования, переменная – именованная или же адресуемая другим способом область памяти, адрес которой можно использовать, чтобы получить доступ к данным. Переменные позволяют также различным образом менять данные, с которыми работает программа.
С помощью переменных ПЛК может обрабатывать сигналы и реагировать на них. При помощи алгоритмов запускаются и останавливаются технологические процессы.
Основы программирования ПЛК. Реле и контроллер
Логика загружается в ПЛК при помощи программного обеспечения. Это ПО определяет, какие из выходов будут под напряжением и какие входные условия нужны для любых изменений. Управляющая программа аналогична схеме работы физического реле, но физически нет ни реле, ни проводов, ни катушек. Все эти элементы – мнимые. ПО разрабатывается и просматривается на ПК, соединенном с интерфейсом контроллера.
Есть кнопка, контроллер и индикатор. Когда кнопка не задействована, сигнал на вход контроллера отправлен не будет. ПО, показывающее открытый вход, не отправит сигнал на выход. Так, на выходе ток отсутствует и лампа не будет гореть.
Если кнопку нажать, то на входной канал отправиться соответствующий сигнал. Контакты переведутся в активное состояние, как физическое реле. В данном случае контакт контроллера, открытый ранее, закроется и программа отправит сигнал на выход. Когда выходной контакт будет под напряжением, то индикатор загорится.
Контакты с индикатором соединены физическим способом. А сигнал виртуальный. Однако, все элементы существуют только в компьютерном ПО, а как физические – нет. Но принцип реле здесь используется. Также в программе можно задавать условия, которые будут проверятся и выполнятся контроллером.
Чтобы создать такую же схему, но на основе физических железных компонентов, понадобится три реле, где два открытых контакта – каждый из них будет использоваться. Но с помощью ПЛК можно не добавляя лишнего оборудования использовать столько контактов на каждый вход, сколько захочется.
Управляющие команды на языке релейной логики просты и понятны для инженеров-электриков. На графическом интерфейсе видны все логические операции. Это электрическая ц3епь с замкнутыми либо разомкнутыми контактами. Если по цепи протекает ток, что это истина. Если ток не протекает, тогда состояние – ложь.
Основой управляющей программы служат логические выражения, состоящие из операндов и переменных. Также программа состоит из операторов. Операторы – это команды языка программирования.
Инженер-программист ПЛК – это сегодня больше инженер, чем программист. Сейчас не нужны сложные языки, писать ассемблерные вставки. Достаточно использовать стандартные функциональные блоки.
Среда программирования
Стандартом для программирования ПЛК является языки МЕК. В начале 90-х годов для этих задач на рынке появилась ПО «CoDeSys». Продукт соответствует стандарту МЕК 61131-3 для работы с ПЛК. ПО пользуется большим спросом по причине бесплатной лицензии.
Сейчас этот программный пакет серьезно вырос. Кроме стандартных интегрированных в систему редактора кода, отладчика и компилятора также в состав включен конфигуратор для контроллеров, промышленных сетей, редактор для составления мнемосхем, отладочных сервер, серверы OPC и DDE. Многие производители ПЛК предлагают эту среду, как базовый инструмент для работы.
Языки программирования ПЛК
Управляющие программы для контроллеров разрабатывают при языков, которые созданы не для программистов в современном понимании, а для инженеров по АСУ ТП.
Самым простым и популярным инструментом считается набор готовых модулей и конфигуратор, позволяющий собрать модули в управляющую цепь. Еще совсем недавно у каждого производителя ПЛК был свой язык. Но к середине 90-х ситуация изменилась. Языки стандартизировали.
Стандарт IEC 1131.3 определяет пять языков:
Удаленное управление и мониторинг
Контроллеры имеют гибкие возможности для коммуникации с другим оборудованием. Эти возможности позволяют удаленно управлять устройствами, а также интегрировать ПЛК в системы автоматизированного управления и сбора данных.
Операторская панель или HIM – это устройство для визуализации. Она может быть встроенной или подключаться кабелем. Существует масса различных типов таких решений – от простых цифровых с кнопками до серьезных сенсорных с функцией оперативного мониторинга и коррекции параметров.
SCADA – это аббревиатура означает систему диспетчеризации и сбора данных. Это программные пакеты, которые позволяют разрабатывать приложения в режиме реального времени. Также пакет имеет инструменты сбора и обработки данных, архивирования и отображения или управления.
Веб-интерфейс позволяет получать доступ к ПЛК по локальным или глобальным сетям. В зависимости функциональности контроллер может не иметь операторской панели, но есть порт для подключения ПЛК к Ethernet. Тогда устройство можно настраивать удаленно по веб-интерфейсу или с ноутбука.
Более продвинутое решение реализовано в семействе ПЛК Siemens – встроенный веб-сервер. Он позволяет выполнять мониторинг, а также управлять системой. Сегодня в ПЛК реализованы функции подключения к облакам для осуществления удаленного контроля.
Применение контроллеров
Логические контроллеры встречаются в большом количестве на автоматизированных линиях и сборочных конвейерах. Устройства можно встретить на системах стендовых испытания двигателей, на прессовом оборудовании, токарных автоматических станках, установка для сварки, резки металла. Управляющие устройства также встречаются в автоматизации технологических процессов и быту.
Производители ПЛК
Российские производители ПЛК :
На что обращать внимание при покупке
Все зависит от типа производства и задач, которые нужно будет решать, но существуют и универсальные решения. Важнейшие моменты:
Самый главный пункт здесь – это первый пункт. Не стоит пытаться отыскать самое доступное оборудование на рынке – процесс переподготовки специалистов сведет к нулю всю возможную экономию. Стоить выбрать нескольких производителей и сотрудничать только с их продукций.
Другие специалисты утверждают, что самое главное это ПО. Различий в комфорте использования программных продуктов значительно больше, чем в железе ПЛК.



