Содержание:
Условия равновесия тел:
Основным признаком взаимодействия тел в динамике является возникновение ускорений. Однако часто бывает нужно знать, при каких условиях тело, на которое действует несколько сил, не движется с ускорением, а покоится или движется равномерно и прямолинейно. В последнем случае мы всегда можем выбрать другую инерциальную систему отсчета, в которой тело покоится, поэтому в дальнейшем будем изучать условия равновесия покоящихся тел.
Раздел механики, в котором изучаются условия равновесия тел, называется статикой.
Все опытные факты, которые мы рассмотрели в предыдущих параграфах, убеждают нас в том, что тело покоится, если равнодействующая всех сил, действующих на него, равна нулю.
Итак, первое условие равновесия тела: векторная сумма всех сил, приложенных к телу, равна нулю.
Если на тело действует n сил 
Из этого условия следует, что и сумма проекций всех сил на любое направление тоже должна быть равна нулю. В частности, сумма проекций сил на оси выбранной декартовой системы координат равна нулю:

Фактически эти три равенства эквивалентны одному векторному равенству ( 1 ). Но с их помощью достаточно просто решать задачи, поскольку проекции сил — скалярные величины.
В повседневной жизни и технике часто встречаются тела, которые не могут двигаться поступательно, но могут вращаться вокруг оси. Примерами таких тел могут служить двери и окна, качели, колеса машин и детали механизмов и т. д.
На рисунке 149, а изображен однородный диск, который может вращаться вокруг закрепленной оси, проходящей через его центр — точку О. Если подвесить к нему тело в точке А, то диск будет находиться в равновесии.
Естественно, что действующая сила  будет уравновешиваться силой упругости
будет уравновешиваться силой упругости  со стороны оси вращения. Если подвесить тело в точке В, то равновесие тоже не нарушится. Отсюда можно сделать вывод, что точку приложения силы натяжения можно переносить вдоль линии действия силы. При этом силы и лежат на одной прямой.
со стороны оси вращения. Если подвесить тело в точке В, то равновесие тоже не нарушится. Отсюда можно сделать вывод, что точку приложения силы натяжения можно переносить вдоль линии действия силы. При этом силы и лежат на одной прямой.
Если же прямая, на которой лежит вектор силы , не проходит через ось вращения, то эта сила не может быть уравновешена силой упругости оси, и тело поворачивается вокруг нее (рис. 149, б).
На рисунке 149, в изображен тот же диск, на который действуют две силы  и
и  . Численные значения этих сил определяются динамометрами. Сила вращает диск против часовой стрелки, а сила — по часовой стрелке. Диск не будет вращаться, если выполняется условие:
. Численные значения этих сил определяются динамометрами. Сила вращает диск против часовой стрелки, а сила — по часовой стрелке. Диск не будет вращаться, если выполняется условие:
 (2)
(2)
где l1 и l2 — кратчайшие расстояния от оси вращения до прямых, на которых лежат векторы сил и .
Итак, мы получили известное вам из курса физики 8-го класса условие равновесия рычага.
Кратчайшее расстояние от оси вращения до линии действия силы называется плечом силы, а произведение модуля силы F на плечо l называется моментом силы М:
M = Fl (3)
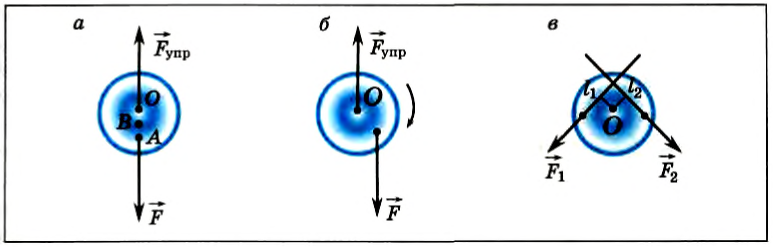
Рис. 149
Следовательно, равенство (2) означает равенство моментов сил F1 и F2. Но момент силы F1 вращает диск против часовой стрелки, а момент силы F2 — по часовой стрелке. Поэтому им нужно приписать различные знаки. Обычно положительным считают момент силы, вызывающий вращение по часовой стрелке, а отрицательным — момент силы, вызывающий вращение против часовой стрелки.
Итак, вторым условием равновесия тела является правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех сил, приложенных к телу, относительно этой оси равна нулю.
Таким образом, тело будет находиться в равновесии, если выполняются два условия: (1) и (4). Например, доска, изображенная на рисунке 150, находится в равновесии.

Рис. 150
Главные выводы:
Условия равновесия тел
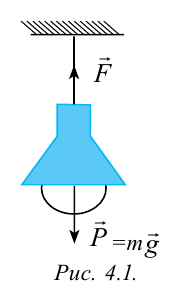
Рассмотрим силы, действующие на подвешенную к потолку лампу (рис. 4.1). Для начала вспомним изученное в 6-м классе понятие «центр масс» тела.
Центр масс – это воображаемая точка, в которой воплощена вся масса тела.
Исходя из этого будем считать, что силы, действующие на тело, приложены к центру масс. На подвешенную лампу действует направленная вниз сила тяжести  . При этом туго натягивается удерживающая ее нить. Возникающая в нити сила натяжения
. При этом туго натягивается удерживающая ее нить. Возникающая в нити сила натяжения  и сила тяжести
и сила тяжести  действуют вдоль одной прямой линии, которая проходит через центр массы и направлены противоположно. Эти силы равны по модулям. Если эти силы сложить по правилу сложения векторов, то результирующая сила становится равной нулю. Поэтому лампа остается в положении равновесия.
действуют вдоль одной прямой линии, которая проходит через центр массы и направлены противоположно. Эти силы равны по модулям. Если эти силы сложить по правилу сложения векторов, то результирующая сила становится равной нулю. Поэтому лампа остается в положении равновесия.
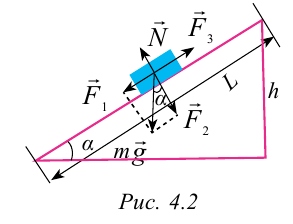
Рассмотрим случай, когда тело покоится в равновесии на наклонной плоскости (рис. 4.2). Рассмотрим действующие относительно центра масс силы в этом случае. На тело действует сила тяжести  .
.
Эту силу разделим на составляющие:  и
и  .
.
При этом сила  стремится сдвинуть тело вниз по наклонной плоскости, сила
стремится сдвинуть тело вниз по наклонной плоскости, сила  представляет силу давления на площадь наклонной плоскости. Эта сила приводит к образованию силы реакции
представляет силу давления на площадь наклонной плоскости. Эта сила приводит к образованию силы реакции  на тело со стороны наклонной плоскости. Также на тело действует сила трения
на тело со стороны наклонной плоскости. Также на тело действует сила трения  в противоположном относительно скольжения направлении.
в противоположном относительно скольжения направлении.
В этом случае векторная сумма всех действующих сил тоже будет равна нулю.
Исходя из вышесказанного можно сделать следующие выводы:
Для того чтобы тело или система тел, не имеющие вращения оси, остались в равновесии, векторная сумма всех действующих на них сил должна быть равна нулю.

Виды равновесия
Если некое тело находится в состоянии равновесия, это не означает, что оно постоянно будет находиться в таком состоянии (рис. 4.3). В реальных условиях тело подвергается неожиданным воздействиям извне, которые невозможно избежать. Главное, что нужно знать – останется ли тело после такого воздействия в равновесии или равновесие будет нарушено. Для этого необходимо учесть направление результирующей силы внешнего воздействия. В зависимости от направления результирующей силы различают три вида равновесия.
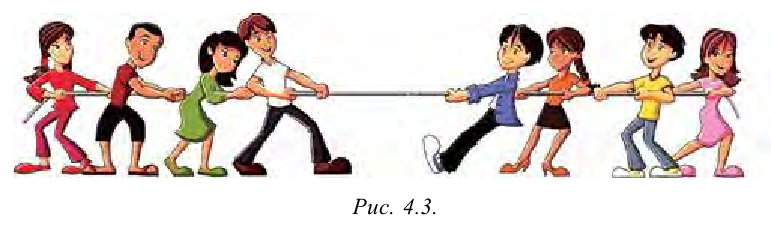
Устойчивое равновесие
При выведении тела из положения равновесия возникают силы, возвращающие тело в прежнее положение, это называется устойчивым равновесием (рис. 4.4а). В данном случае, при небольшом смещении шарика, лежащего на дне сферического углубления, равнодействующая сила возвращает его в положение равновесия.
Неустойчивое равновесие
При выведении тела из положения равновесия возникают силы, удаляющие его от положения равновесия, это называется неустойчивым равновесием (рис. 4.4б). В данном случае шарик находится в верхней точке выпуклой сферической поверхности. При небольшом смещении из положения равновесия равнодействующая сила действующих на него сил удаляет его еще дальше от состояния равновесия.
Безразличное равновесие
Равновесие, при котором смещение тела в любом направлении не вызывает изменения действующих на него сил и равновесие тела сохраняется, называется безразличным равновесием (рисунок 4.4в). Если приложить силу к шарику, находящемуся на горизонтальной поверхности, то он переместится на другое место.
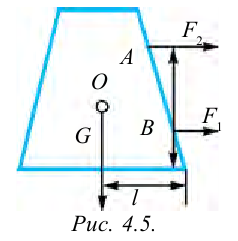
Если на тело, показанное на рисунке 4.5 действует сила  в точке
в точке  ниже центра тяжести (
ниже центра тяжести (  – сила трения), тело приходит в поступательное движение. Не меняя величину силы, приложим ее к точке
– сила трения), тело приходит в поступательное движение. Не меняя величину силы, приложим ее к точке  , при этом тело начинает наклоняться. Начинает уменьшаться расстояние
, при этом тело начинает наклоняться. Начинает уменьшаться расстояние  между крайними точками нижнего основания контура и вектором, направленным вниз из центра тяжести. Если продолжить прикладывать силу, вектор
между крайними точками нижнего основания контура и вектором, направленным вниз из центра тяжести. Если продолжить прикладывать силу, вектор  выйдет за пределы контура тела и оно опрокинется.
выйдет за пределы контура тела и оно опрокинется.
Таким образом, равновесие тела зависит от:

Образец решения задачи
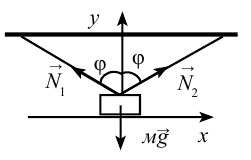
Согласно чертежу, действующие на груз силы  и
и  пересекаются в одной точке.
пересекаются в одной точке.
Следовательно, условие равновесия определяется двумя уравнениями:
После внесения математических изменений получим: 
Ответ: 100 Н.
Определение условия равновесия тела
По I закону Ньютона, нахождение тела в состоянии равновесия означает, что оно находится в покое или движется прямолинейно и равномерно в инерциальной системе отсчета. Ознакомимся с условиями, при выполнении которых тело остается в состоянии равновесия.
Равновесие тела при поступательном движении
Для нахождения тела в состоянии равновесия при его поступательном движении равнодействующая сила (геометрическая сумма всех действующих на тело сил), прикладываемая к телу, должна быть равна нулю:

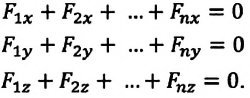
Если геометрическая сумма сил равна нулю, то и сумма проекций этих сил на произвольную координатную ось равна нулю:
Равновесие тела с неподвижной осью вращения
Тело с неподвижной осью вращения находится в равновесии, если алгебраическая сумма моментов действующих на него сил относительно оси вращения равна нулю:

При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
Виды равновесия
Если тело находится в состоянии равновесия, то сумма внешних сил, действующих на него равна нулю, равна нулю и сумма моментов этих сил относительно любой оси.
Виды равновесия. Устойчивое, неустойчивое и безразличное равновесие
Равновесие делят на: устойчивое, неустойчивое и безразличное.
Равновесие тела называют устойчивым, если при небольших смещениях, действующие на него силы, стремятся вернуть его снова в положение равновесия.
Положение равновесия называют неустойчивым, если при малых смещениях силы, оказывающие воздействие на тело уводят его из положения равновесия еще больше.
Если при небольших смещениях из положения равновесия силы, действующие на тело и их моменты, уравновешиваются, как и прежде, то такое равновесие называют безразличным.
Классическим примером типов равновесия служит положение шарика на опорах различной формы. Рис. 1 (а) шарик находится в положении устойчивого равновесия. Рис.1 (б) равновесие тела неустойчивое. Рис.1 (в) положение тела безразличное.
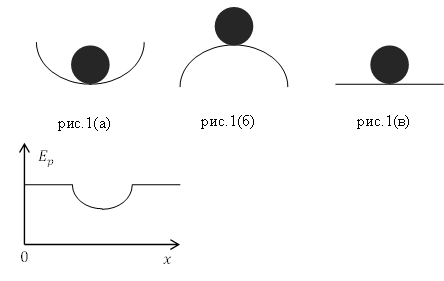
Если тело имеет точку опоры (как шарик на рис.1), и равнодействующая всех сил, приложенных к телу, направлена к положению равновесия, то тело находится в устойчивом равновесии. В том случае, если равнодействующая направлена в сторону противоположную точке равновесия, то тело в неустойчивом равновесии. Если равнодействующая сил, приложенных к телу равна нулю, то равновесие безразличное.
Вид равновесия тела зависит от распределения его массы и положения этого тела относительно других тел.
Принцип минимума потенциальной энергии
Данное свойство применяют для поиска положения равновесия и при исследовании характера равновесия.
Вертикальная колонна стоящая свободно находится в положении устойчивого равновесия, так как при маленьких наклонах ее центр масс увеличивает свое расстояние от опоры (рис.2). Это происходит до того момента пока вертикальная проекция цента масс не выйдет за пределы площади опоры, что означает угол отклонения колонны от вертикали превысил максимальное значение. Получается, что область устойчивости находится в переделах от минимума потенциальной энергии (вертикальное положение) до ближайшего к нему максимума. Если колонна лежит горизонтально, то ее область устойчивости является более широкой, чем у вертикальной колонны.
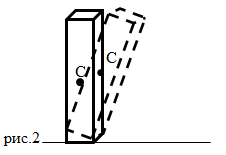
Для тела находящегося на горизонтальной опоре необходимо, чтобы вертикальная линия, проведенная через центр масс тела, пересекала поверхность, которую ограничивает опора, тогда тело будет находиться в равновесии. Угол наклона тела (рис.2), при котором тело еще не падает, определяют: площадь опоры и высота центра тяжести тела. Чем больше площадь опоры и ниже расположен цент тяжести тела, тем оно устойчивее.
Статическое и динамическое виды равновесия тела
Рассматривая равновесие тела, выделяют статический и динамический виды равновесия тела.
Статическим называют равновесие тела, если оно при воздействии на него внешних сил находится в состоянии покоя.
Динамическим равновесием называют состояние тела, при котором оно движется, но конфигурация сил и энергии его не изменяется.
Примеры задач с решением
Задание. Однородная линейка висит на гвозде в состоянии равновесия. Определите тип равновесия, для каждого рисунка.
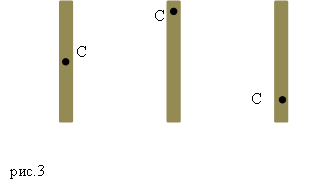
Решение. 1) В первом случае гвоздь проходит через центр тяжести линейки (Из соображений симметрии понятно, что цент тяжести однородной линейки находится на ее середине). Состояние равновесия этой линейки будет безразличным. Так как если ось вращения проходит через центр тяжести, то тело будет находиться в состоянии безразличного равновесия при любом положении тела.
2) Во втором случае ось вращения (гвоздь) находится выше центра тяжести, значит, мы получили устойчивое равновесие тела.
3) В третьем случае имеем неустойчивое равновесие. Ось вращения выше центра тяжести тела.
Задание. Сформулируйте условия равновесия тела 1) с закрепленной осью вращения; 2) тела обладающего точкой опоры; 3) тела имеющего площадь опоры.
Решение. 1) Если тело может вращаться около закрепленной оси, то оно находится в положении равновесия, если ось проходит через центр масс тела (безразличное равновесие). Если центр тяжести тела находится ниже оси вращения (устойчивое равновесие). Если ось вращения ниже центра масс тела, то равновесие будет неустойчивым.
3) Пусть тело имеет площадь опоры. Тогда его равновесие будет устойчивым, если вертикаль, проводимая через центр масс этого тела, пересечет площадь опоры.
Равновесие в физике сценарий фильма
Устойчивое равновесие: когда после малого отклонения от положения тела (относительно источника воздействия), в системе возникают силы, стремящиеся возвратить тело в состояние равновесия, равновесие не нарушается, тело возвращается в положение равновесия, а отклонение от равновесия не возрастает со временем.
На схеме это наглядно видно. Если шар отклонится в сторону. В системе возникнут силы (именно силы) стремящиеся вернуть шарик в исходное положение.
(Анимация) Второй вид равновесия:
Неустойчивое равновесие: когда после малого отклонения положения тела (относительно источника воздействия), равновесие нарушается, тело не возвращается в положение равновесия, а отклонение от равновесия возрастает со временем.
(анимация горка).
И здесь На схеме это наглядно видно. Если шар отклонится в сторону, в системе не возникнут силы (именно силы) стремящиеся вернуть шарик в исходное положение.
Безразличное равновесие когда после малого отклонения от исходного положения тело продолжает находиться в равновесии. равновесие сохраняется в новой точке. (пример шар на плоскости).
Здесь тоже всё наглядно. Шар отклонился в сторону, но продолжает находиться в равновесии. Равновесие сохраняется в новой точке. В системе не возникают силы стремящиеся вернуть шарик в исходное положение.
То есть силы могут обеспечить телу, как устойчивое равновесие, так и неустойчивое
и как частный случай безразличное равновесие.
Рассмотрим подробнее:
Определение равновесия это основной и очень важный текст. Он передает основной смысл того, что во всем научном мире (уточню в НАУЧНОМ) определяется как равновесие.
Равновесие: состояние покоя тела по отношению к другим телам. Равновесие имеет место, когда все действующие на тело силы взаимно уравновешены.
В самом определении надлежит сразу отметить и запомнить два ключевых момента:
Первое: что уравновешены именно СИЛЫ
Не движение не энергии не температура не массы, а именно силы.
Второе, что надо запомнить – это то, что уравновешены именно ВСЕ силы
а не половина или какая-то часть сил.
Почему важно то, что уравновешенны именно все силы?
Проиллюстрируем это:
Анимация финка часть)
Как Вы видите на данной анимации у нас есть устойчивость равновесия вдоль по профилю ( изображено через светящуюся подвижную точку) но нет устойчивости равновесия поперек профиля. В результате мы для данной конструкции не получаем устойчивого равновесия в комплексе. То есть в реальности никакого устойчивого равновесия для данной схемы не будет.
Именно потому, что важно учитывать именно все силы, определение равновесия и содержит прямое указание на учет всех сил.
То есть если мы установим шар на острие иглы и учтем силы только по одной оси (на схеме обозначено красными стрелками), то в плане устойчивости равновесия нам это ровным счетом ничего не даст. Потому что шар элементарно может упасть в любом другом направлении ( на схеме направление обозначено черными стрелками).
Вывод однозначен: устойчивость равновесия зависит именно от ВСЕХ сил
И это научный факт
Ещё раз зафиксируем: Равновесие: состояние покоя тела по отношению к другим телам. Равновесие имеет место, когда все действующие на тело силы взаимно уравновешены.
.
То есть если вы открыли учебное пособие и в определении равновесия не указано что речь идет о ВСЕХ силах, приложенных к телу, то вы держите в руках безграмотный учебник, который согласно действующему законодательству вообще не должен быть допущен в систему образования.
У безграмотных учебников есть только один положительный аспект:
Если учебник безграмотен, если например, в определении равновесия нет прямого указания на все силы, то ваш вуз должен вам денег за предоставление некачественной услуги образования и вы можете эти деньги получить.
Вернемся к определению равновесия и
— зафиксируем второй важный момент.
Он звучит так: все действующие на тело силы взаимно уравновешены
Так устроен научный метод. Если Вас по какой то причине не устраивает общепринятое определение равновесия, и Вы хотите определить равновесие через например движение, энергию или температуру, то научный метод и это предусматривает, но тогда Вы должны сначала ввести соответствующий новый термин например энерговесие/ двиговесие, как угодно и тогда уже дать определение этому понятию через энергию, движение и так далее.
Иное в рамках научного метода недопустимо. И даже если 148 академиков против этого проголосует это ничего не поменяет. Разве что эти академики пополнят список безграмотных чуд.
Не нравится научный метод – пишите и читайте художественную литературу. В науку не суйтесь.
Теперь Давайте рассмотрим примеры устойчивого и неустойчивого равновесия.
(тележка анимация)
Если же мы сферу будем сжимать то сила наооброт – увеличится. Увеличиваться будет до бесконечности.
Что науке известно о притяжении и отталкивании.
Тело движется поступательно (между магнитов). Любое воздействие либо смещение выводит систему из равновесия.
Планетарное неустойчивое равновесие: когда после малого отклонения от положения тела равновесие нарушается, тело не возвращается в положение равновесия, а отклонение от равновесия возрастает со временем.
(примером неустойчивого планетарного равновесия является движение стального шарика по горизонтальной плоскости, вокруг постоянного магнита)
относительный покой тела: состояние покоя относительно избранной системы отсчета, подразумевает возможное изменение геометрического расстояния между центрами масс обоих тел, связанное с продвижением тела по траектории орбиты.
То есть тело движется по орбите и при этом расстояние до центра масс (центра вращения) может меняться.
Первый тип отклонения тела: когда отклонение тела связано с воздействием внешних сил.
(камень упал на спутник и его отклонил).
Второй тип отклонения тела: когда отклонение тела связано с продвижением тела по траектории орбиты (некруговой орбиты).
Если орбита некруговая, то при движении тела по ней происходят цикличные отклонения. Тело то приближается к центру то отдаляется от него.
Применительно к обсуждаемой теме (Небесная Механика) речь идет о планетарном устойчивом равновесии, при котором любые отклонения тела, не вызывает нарушение состояния планетарного равновесия.
Сила как фактор, определяющий равновесие:
У вас есть два материальных объекта расположенных в пространстве.
Как им находиться на расстоянии друг от друга?
Для этого нужны силы.
Между объектами силы уже есть.
Эти силы могут быть либо отталкивания (приталкивания) либо притяжения.
На отталкивании все понятно. Объекты оттолкнулись и друг на друга не падают.
А как обеспечить равновесие на притяжении. Объекты стремятся друг к другу.
Фундаментально равновесие тела на орбите может быть определено только соотношением сил Тяготения и Центробежной силы.
Для спутника сила тяготения как мы знаем направлена условно к Земле, а Центробежная сила от Земли от центра вращения. Практически две встречно направленные силы.
Силовое состояние спутника на орбите может быть устойчивым равновесием, а может быть неустойчивым равновесием
Чтобы силовое состояние спутника было устойчивым равновесием – необходимо, чтобы при единичном смещении возникали силы стремящиеся возвратить систему в состояние равновесия.
Рассмотрим силы, приложенные к спутнику.
В единичном пересечении горизонтальных и вертикальных делений обозначено тело. Оно находится в точке равновесия.
Вниз от тела красной стрелкой обозначена сила тяготения (ситуация соответствует действию силы тяготения на спутник находящийся на орбите).
Поймем как эта сила меняется. Зададим единичное смещение. Приблизим спутник к Земле.
Как Вы видите на схеме центробежная сила направлена вверх от Земли и идентичное первому случаю смещение тела, в сторону Земли дает меньшее приращение центробежной силы.
Зеленая стрелочка количественно, визуально меньше черной стрелки которую мы видели на предыдущей схеме.
Взглянем на неё ещё раз и сравним.
Теперь Совместим обе схемы, оба графика и объединим приращение сил центробежной и тяготения.
далее:
Рассмотрим устойчивость орбиты наглядно
— источник поля установлен на горизонтальную плоскость,
— отметим на плоскости воображаемую устойчивую орбиту.
Уменьшим силы трения путем создания вакуума.
Для стального шарика массой М, согласно заданного радиуса, можно рассчитать требуемую для равновесия скорость.
Таким образом мы получим теоретически предполагаемую орбиту. По круговой версии.
Таким же образом мы можем отметить эллиптическую орбиту.
Форма обоих орбит предполагает равенство сил приложенных к телу, но не учитывает будет это равенство устойчивым или не устойчивым.
Ранее мы зафиксировали, что важны все силы не только повдоль воображаемой траектории движения но и поперек, и если сил требуемой направленности не будет, то воображаемая траектория (воображаемая орбита) не только не совпадет с траекторией реальной, но и вообще не будет никакой орбиты, а будет потеря равновесия.
Иными словами для одной и той же формы воображаемая расчетная орбита может быть как устойчивой так и неустойчивой.
И важно запомнить ещё один важный момент: Если невозможно равновесие в точке
, то и на пути состоящим из таких точек равновесие тоже невозможно.
Фильм снят на деньги зрителей.
Бюджет фильма составил: 540 рублей.
Возможные темы для следующего фильма:
1. Искусственный интеллект.
2. Есть ли Бог?
3. Гравитационное взаимодействие.
4. Внеземная жизнь.
Обсудить тему будущего фильма
(предложить свою) можно здесь:
http://viictor.livejournal.com/
Поддержать съёмку следующего фильма можно через счет:
Вебмани:
R367259574362
или:
Яндексденьги:
41001600256514



