Полунатурное моделирование
7.1.1. Общие положения
Организация испытаний САУ на основе полунатурного моделирования отвечает поэлементному комплексированию устройств в систему так, что можно провести оценку каждого устройства в отдельности, прежде чем они будут объединены с другими.
При этом одновременно используются адекватные математические модели части устройств наряду с ее реальной аппаратурой, макетами, образцами.
Испытания САУ с участием в контуре человека, например, САУ летательного аппарата (ЛА), позволяет оценить взаимодействие САУ с человеком – оператором, построить тренажер для отработки действий оператора.
Программа летных испытаний САУ ЛА обычно на этапе ее проектирования ограничена несколькими летными экспериментами, поэтому применение полунатурного моделирования позволяет достичь оптимального распределения работ между испытателями САУ ЛА с использованием моделей и натурными (летными) испытаниями.
Практика показывает, что за счет полунатурного моделирования удается сократить натурные испытания на 30%.
Важным принципом, закладываемым при организации испытаний САУ с помощью полунатурного моделирования, является принцип испытаний на основе комплексного воздействия возмущений.
Оценка результатов комплексных испытаний проводится обычно на основе суперпозиции реакций на отдельные возмущающие воздействия.
Эти воздействия воспроизводятся при так называемых частных испытаниях. Важно иметь в виду, что весьма сложно оценить степень приближения таких испытаний к реальным условиям работы САУ, когда все возмущения действуют одновременно.
Комплексные испытания иногда проводят по схеме простого механического соединения динамических моделирующих стендов.
Однако в такой схеме невозможно практически оценить достоверность испытаний из-за неконтролируемого взаимодействия отдельных механических элементов испытательного оборудования и сложность соблюдения условий подобия.
В то же время комплексные испытания оказываются возможными на основе динамических моделирующих комплексов.
7.1.2. Автоматизация испытаний на основе полунатурного моделирования
Автоматизация испытаний на основе полунатурного моделирования сводится:
— к формированию возмущающих воздействий, задаваемых на реальную аппаратуру;
— к измерению сигналов состояния САУ;
— сбору и накоплению данных испытаний, обработке результатов и изготовлению проектных документов.
Отсюда, соответственно, возникает необходимость разработки сразу нескольких базовых инструментов испытателя.
— во-первых, инструмент для формирования возмущающих воздействий;
— во-вторых, инструмент для обработки результатов испытаний и;
— в-третьих, инструмент для управления испытаниями.
Алгоритмы формирования воздействий
Алгоритм формирования детерминированных воздействий
Алгоритм формирования детерминированных воздействий, составленный с учетом собственного движения ДМС, имеет вид:
 (7.1)
(7.1)
где  ,
,  ,
,  — начальные значения входного сигнала ДМС
— начальные значения входного сигнала ДМС  , его скорости
, его скорости  и ускорения
и ускорения  ;
;
 ,
,  ,
,  — импульсная переходная функция ДМС и ее производные.
— импульсная переходная функция ДМС и ее производные.
Алгоритм формирования случайных воздействий
Алгоритм формирования случайных испытательных сигналов задается в виде многомерного случайного процесса
 , (7.2)
, (7.2)
нестационарного относительно заданных математических ожиданий
 , (7.3)
, (7.3)
 , (7.4)
, (7.4)
и стационарного относительно нормированной корреляционной матрицы
 , (7.5)
, (7.5)
которой соответствует заданная спектральная матрица
 . (7.6)
. (7.6)
 (7.7)
(7.7)
где  — некоррелированные нормированные случайные процессы с единичной спектральной плотностью и нулевым математическим ожиданием (составляющие “белого шума”);
— некоррелированные нормированные случайные процессы с единичной спектральной плотностью и нулевым математическим ожиданием (составляющие “белого шума”);
 — передаточная матрица формирующего фильтра;
— передаточная матрица формирующего фильтра;
 — центрированные и нормированные случайные процессы с единичным СКО;
— центрированные и нормированные случайные процессы с единичным СКО;
 — центрированные случайные процессы, нестационарные относительно дисперсий
— центрированные случайные процессы, нестационарные относительно дисперсий

Методы и алгоритмы обработки результатов испытаний
Методы и алгоритмы обработки результатов испытаний обеспечивают определение оценок вероятностных характеристик в ДМК как нестационарных случайных процессов.
Методы и алгоритмы управления испытаниями
Методы и алгоритмы управления испытаниями служат для управления процессами испытаний в реальном масштабе времени, т.е. в темпе реальной аппаратуры.
Характеристика проблем и методов моделирования объектов
Под моделированием какого-либо объекта (системы, явления) обычно понимается воспроизведение и исследование другого объекта, подобного оригиналу, в форме, удобной для исследования, и перенос полученных результатов на моделируемый объект. При этом объекты считаются подобными, если характеристики происходящих в них процессов отличаются вполне определенными и постоянными в течение данного процесса коэффициентами. Модель изучаемого объекта при этом может быть иной физической природы, отличной от природы оригинала. Это обстоятельство открывает широкие возможности для применения моделирования в проектировании объектов, обусловленные применением таких эффективных средств, как ЭВМ, динамические стенды, имитаторы, тренажеры.
В основе моделирования лежат информационные процессы, поскольку в процессе реализации модели получают информацию о данном объекте, одновременно в эксперимент с моделью вводится управляющая информация, далее происходит обработка полученных результатов, т.е. информация лежит в основе всего процесса моделирования.
В настоящее время получили применение системы моделирования, отличающиеся высокой степенью автоматизации процесса моделирования, когда наряду с программными средствами управления вычислительным экспериментом используется возможность диалогового общения исследователя с процессом моделирования. Степень автоматизации процесса моделирования тесно связана с управляемостью модели. В этом смысле наличие многих управляемых параметров и переменных модели в реализованной системе моделирования дает возможность поставить широкий эксперимент и получить обширный спектр результатов.
Характеризуя проблему моделирования в целом, необходимо учитывать, что от постановки задачи моделирования до интерпретации полученных результатов существует большая группа сложных научно-технических проблем. К основным из них можно отнести:
— идентификацию реальных объектов;
— выбор вида моделей;
— получение реализаций переменных объекта;
— построение моделей и их реализацию на ЭВМ;
— взаимодействие исследователя с моделью в ходе вычислительного эксперимента;
— проверку правильности полученных в процессе моделирования результатов и выявление основных закономерностей.
В зависимости от объекта моделирования и вида используемой модели эти проблемы могут иметь разную значимость.
В одних случаях наиболее сложной оказывается идентификация, в других — проблема реализации модели на ЭВМ, особенно в случае имитационного моделирования сложных систем.
Для исследования объектов и систем управления используются различные методы моделирования:
— математическое моделирование на ЭВМ;
Каждый из этих методов имеет свои достоинства и недостатки. Применение того или иного метода определяется в каждом конкретном случае в зависимости от исследуемой системы и условий ее работы. При этом необходимо иметь набор правил и условий, выполнение которых обеспечивает требуемую точность изучения реального объекта по его модели. Эти правила и условия формулируются в теории подобия.
При использовании физического моделирования процессы, протекающие в модели и в оригинале, имеют одинаковую иногда и различную физическую природу. Физическая модель может отличаться от оригинала размерами, скоростью протекания и физической природой процессов или материалами, из которых она изготовлена. Примерами такого моделирования может служить изучение аэродинамических свойств самолета при помощи его макета в аэродинамической трубе, изучение механических колебаний с помощью электрической схемы.
Физическая модель может наиболее полно воспроизводить такие свойства оригинала, которые при теоретическом изучении не могут быть учтены в полной мере. Теоретической базой физического моделирования является теория подобия.
Теория подобия позволяет пересчитать количественные характеристики, полученные при изучении модели, в количественные характеристики оригинала.
При физическом моделировании необходимо для каждого конкретного объекта создать свою модель. Так как изготовление сложных объектов обходится, как правило, очень дорого, требует больших материальных и трудовых затрат, то изменение параметров модели часто нецелесообразно. Поэтому, несмотря на определенные преимущества, физическое моделирование находит ограниченное применение при исследовании сложных объектов и систем управления. Для этой цели широко применяется математическое моделирование.
При математическом моделировании исследование объекта осуществляется посредством модели, сформулированной на языке математики и реализованной, как правило, на ЭВМ с использованием тех или иных математических методов.
При моделировании на ЭВМ в качестве объекта моделирования (оригинала) выступает исходные уравнения, представляющие математическую модель реального объекта, а в качестве модели — процессы, протекающие в соответствии с этими уравнениями и воспроизводимые на ЭВМ в виде “машинных решений” путем реализации программ.
Математическое моделирование объектов и систем управления осуществляется на АВМ и ЦВМ, поэтому часто такие способы называют аналоговым и цифровым моделированием.
В математическом моделировании выделяют имитационное моделирование, под которым понимается воспроизведение объектов с имитацией случайными величинами и случайными процессами элементов оригинала, которые не удается представить определенными математическими моделями. При этом процесс функционирования объекта (системы) представляется в виде определенного алгоритма, который реализуется на ЭВМ.
На некоторых тактах работы имитационной модели используются параметры, выбираемые исследователем, так называемые управляющие воздействия. Выбор управляющих воздействий осуществляется из некоторого множества и обычно имеет критерий качества этого выбора, т.е. функцию, которую следует оптимизировать. Тогда перед тем как вводить управляющие воздействия в имитационную модель, решается оптимизационная задача по их отысканию, и лишь после этого найденные оптимальные значения вводятся в имитационную модель. В этом случае имитация позволяет моделировать отклик системы на оптимальные управления ею. Если множество управляющих воздействий не слишком богато, то все они могут быть перепробованы в имитационной системе. Результаты имитационного моделирования в таком случае позволит провести оценку управляющих воздействий — отбросить заведомо плохие, упорядочить и т.п.
Таким образом, имитационное моделирование рассматривают так же, как управляемый эксперимент, производимый на ЭВМ. В таком эксперименте определенные математическими моделями части объекта моделирования взаимодействуют с имитирующими возмущающие воздействия и некоторые части объекта генераторами случайных величин. Это взаимодействие проводится по определенным в эксперименте правилам, а результаты моделирования подвергаются статистической обработке.
Результаты имитационных экспериментов могут влиять на вид модели после завершения серии прогонов ее на ЭВМ (исключение малозначимых параметров и входов и т.д.).
Полунатурное моделирование — это моделирование с реальной аппаратурой, при котором часть системы моделируется, а остальная часть является реальной.
Применение такого метода моделирования становится необходимым в тех случаях, когда не удается описать работу некоторых элементов системы математически. Например, при исследовании радиолокационных (РЛ) САУ летательных аппаратов в условиях помех процесс приема и передачи антенной отраженного сигнала трудно поддается математическому описанию. Поэтому приходится РЛ и другую аппаратуру, не поддающуюся математическому описанию, воспроизводить в натуре, а остальные звенья САУ — математически на ЭВМ. Естественно работа всей замкнутой схемы моделирования должна проходит в натуральном масштабе времени. Такое моделирование системы управления позволяет анализировать как всю систему в целом, так и отдельные ее элементы, исследовать влияния кинематики и динамики элементов реальной аппаратуры на работу САУ, несмотря на то, что их математическое описание отсутствует.
В процессе полунатурного моделирования удачно сочетаются достоинства математического и натурного моделирования и может быть достигнуто оптимальное взаимодействие между вычислительными и натурными экспериментами. В настоящее время методы полунатурного моделирования эффективно применяют при проектировании разнообразных автоматических управляющих систем.
Необходимость применения таких методов возникает, если:
— объект управления находится еще в стадии проектирования, а элементы устройства управления реально существуют;
— объект не может испытываться в лабораторных условиях;
— элементы устройства управления имеют нелинейные характеристики, трения, помехи, которые при составлении их уравнений не учитывались;
— проведение натурных экспериментов по настройке устройства управления на объекте дорого или вообще недопустимо.
Для проведения полунатурного моделирования необходимо иметь сопрягающие устройства для связи модели (ЭВМ) с внешними реальными элементами.
Структура полунатурного моделирования системы управления представлена на рис. 4.12. Система включает также модель генератора возмущающих воздействий для выполнения имитационных экспериментов и устройство сопряжения с объектом (УСО), т.е. преобразующие элементы для связи модели объекта с реальной аппаратурой. Включение в схему моделирования дополнительных преобразующих элементов искажает результаты моделирования реального процесса. Поэтому основные свойства этих элементов должны быть учтены при обработке результатов моделирования или же при организации самого процесса моделирования. Например, если преобразующие элементы инерционны, то можно хотя бы частично скомпенсировать инерционность введением в модель объекта форсирующих звеньев.
Цель моделирования при проектировании САУ — выбор структуры и параметров отдельных устройств автоматической системы, отвечающих требованию выполняемых ею функций и заданным показателям качества ее работы. При выбранной структуре автоматической системы моделированием определяется лишь оптимальные значения параметров устройства управления, в наибольшей степени влияющих на заданные показатели качества.
Моделирование применяется также для исследования спроектированной автоматической системы с целью выяснения ее надежности, устойчивости, чувствительности и поведения при отказе тех или иных элементов, при различных (в том числе аварийных) возмущающих и задающих воздействиях.
При изучении процессов в реальных системах и их математических моделях различают три типа времени:
1. Реальное, во время которого протекают процессы в реальных условиях и системах;
2. Модельное (системное), во время которого протекают процессы в модели системы. Использование модельного времени позволяет анализировать процессы в моделях в ускоренном или замедленном темпе, а также останавливать решение для изучения процессов в какой-то момент времени;
3. Машинное, во время которого происходит моделирование системы на ЭВМ, оно регистрируется таймером ЭВМ.
Дата добавления: 2016-06-22 ; просмотров: 10492 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Стенды полунатурного моделирования
Испытание изделия (продукции) – это экспериментальное определение количественных и (или) качественных характеристик свойств объекта испытаний (изделия), для фиксации и измерения результатов воздействия на него различных внешних факторов, при его функционировании или моделировании, с целью оценки этих характеристик или проверки их соответствия установленным требованиям. Процесс испытаний регламентируется определенным набором стандартов, технических условий или ГОСТов. Основой классификации испытаний являются цели испытаний, их организационный уровень, место проведения испытаний (лаборатория, полигон, натурные, эксплуатационные испытания), состояние испытываемого образца (макет, модель, натурный образец), этапы разработки и освоения (доводочные, предварительные, квалификационные), этапы производства изделия (предъявительские, приемо-сдаточные и т. д.).
Испытания изделий Испытания проводят с учетом назначения (определения использования) объекта или изделия. Примерная схема проведения испытаний (согласно техническому заданию на разработку для вновь создаваемых изделий) включает в себя несколько этапов: эскизное и техническое проектирование, изготовление опытной партии, серийных изделий. Схема испытаний в процессе проектирования технического изделия
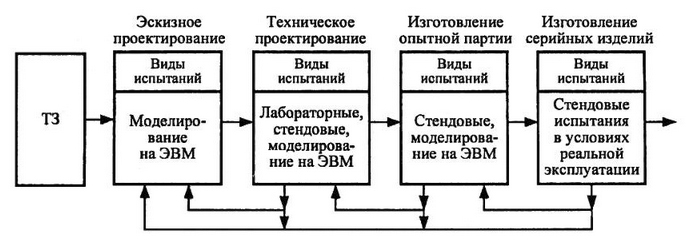
Из приведенной схемы понятно, что в результате действия обратных связей происходит последовательное уточнение параметров изделия и приближение его характеристик к оптимальным значениям. Приведённая схема наглядно показывает взаимосвязь испытаний с процессом проектирования и ее определяющую роль в процессе оптимизации параметров изделия. При этом на всех этапах создания и испытаний важнейшую роль играет вычислительная техника (ЭВМ). Для каждой стадии проектирования характерен свой метод, например, для начальных стадий разработки, наиболее эффективен способ математического моделирования, так как он позволяет узнать некоторые особенности системы в первых циклах моделирования и заранее внести необходимые корректировки. Напротив, на заключительной стадии, проектирование проходят полунатурные и натурные испытания системы. Данные математические модели в последующих этапах изучают с использованием методов вычислительной математики на основе современных мощностей вычислительной техники.
Полунатурные методы моделирования
Полунатурные методы моделирования занимают промежуточную стадию проектирования, когда опытные образцы изделия уже физически изготовлены, но они еще не готовы к натурным (реальным) испытаниям в силу своей незаконченности, неточности и некоторой неизвестности по ряду параметров. При натурных испытаниях уточнения функциональности системы (изделия), при различных входных воздействиях и производятся отладки алгоритмов работы всей системы (полного изделия). Так же полунатурные испытания, в силу своей комплексности (сложности) натурных и математических моделей, позволяют проводить моделирование тех ситуаций, когда натурное моделирование невозможно, например: моделирование функциональности навигационного оборудования, космических спутников и т. п.
Отличия и особенности полунатурных методов моделирования
С помощью стенда полунатурного моделирования, моделирующего внешние определяющие воздействия и физической модели критического элемента (изделия), можно исследовать режимы работы данного изделия во всех требуемых диапазонах возможных изменений, необходимых параметров, сымитировав необходимые внешние воздействия. Так же, методы полунатурного моделирования позволяют исключить неопределенность, которая проявляется при имитационном (математическом) моделировании, в виду невозможности точного и достаточного построения математической модели работы системы. Таким образом, использование методов полунатурного моделирования при проектировании сложных современных технических систем имеет важное самостоятельное значение.
Преимущества полунатурных методов моделирования
Опорно-Поворотное Устройство (ОПУ) с высокомоментными поворотными двигателями (Разработано и произведено в компании “Сервотехника”, http://www.servotechnica.ru). Переход на проектирование корпусных деталей стендов ПМ из различных композиционных материалов позволит, снизив инерцию, существенно улучшить их эксплуатационные характеристики, а также решить проблемы, связанные с отражением радиоволн от металлических корпусных частей стендов ПМ.
Узнать более подробно про динамические моделирующие стенды >>

Заказать или разработать стенд полунатурного моделирования >>
*Приведены схематичные изображения из чертежной документации компании Сервотехника, а также фотографии и схематичные рисунки от различных производителей из открытых источников сети интернет и публичных сайтов компаний. Видеофрагменты предоставлены из архивов компании Сервотехника.
Путеводитель по созданию стендов полунатурного моделирования (HIL) оборудования самолётов

За время работы в отрасли авиастроения у меня и коллег накопился большой опыт по разработке и созданию стендов полунатурного моделирования бортового оборудования самолётов (Hardware-In-the-Loop, HIL) и стендов быстрого прототипирования (Model-In-the-Loop, MIL). Данная публикация — это попытка свести наш опыт в одну публикацию. Получившийся текст оказался довольно подробным, но вырезать что-то рука не поднимается. К тому же при сокращении местами может пропасть причинно-следственная связь. Итак, здесь будет рассказываться:
Кому интересно — добро пожаловать под кат.
Предыстория вопроса
Мы — группа инженеров с большим опытом работы в гражданской авиастроительной отрасли.
У нас за плечами работа над созданием бортового оборудования, стендов, тренажеров для самолетов SSJ-100 Sukhoi Superjet, MC-21, ДА-42Т, Л-410УВП-Е20.
С самого первого стенда мы столкнулись с отсутствием методичек для тех, кто собирается построить испытательный стенд с десятками тысяч проводов, сотнями тысяч сигналов и постоянно меняющейся структурой. По причине той старой тоски по знаниям мы с коллегами и решили поделиться наработками — вдруг кто-то прямо сейчас идёт по нашим любимым граблям?
По нашим сегодняшним представлениям у любого стенда есть следующие особенности:
Часть 1. Инструменты разработки
В этом разделе мы опишем два из трёх основных инструментов: ПО dBricks и программную среду имитационного комплекса ADS2R4. Третий элемент цепочки инструментов — Simulink в представлении и описании, пожалуй, не нуждается. Также важно упомянуть, что эти три продукта при правильном подходе можно тесно друг с другом интегрировать и упростить большинство процессов разработки стендов.
dBricks применяется для:
ADS2R4 – это среда выполнения тестов и моделирования в реальном времени, специально созданная для задач разработки, испытаний и валидации архитектуры бортового оборудования, которая отвечает требованиям как целостности, так и универсальности.
Про инструмент dBricks
dBricks – это основной инструмент, который применяется для ускорения разработки и комплексирования сложного бортового оборудования. Инструмент представляет собой базу данных для обработки следующих проектных данных:
Сам инструмент dBricks имеет функционал доступа по API, который используется для формирования собственных скриптов генерации документов, а также может использоваться для заполнения и обновления содержимого базы данных.
Применение dBricks гарантирует разработчикам стендов:
Про подключение оборудования в dBricks на физическом уровне
Описание каждого устройства в dBricks включает коллекцию аппаратных портов.
Аппаратные порты устройств позволяют устройствам подключаться физически между собой с помощью проводов в пределах проекта. К свойствам порта относятся:

Рис. 1: Модель данных проводки
На уровне проекта порты устройств быть соединены шинами. Обладая данными о распиновке портов и связей, между портами можно сформировать, например, схемы подключений.
Рис. 2: Подключение портов и распределения контактов
В проводке летательного аппарата за этапом определения того, что с чем должно быть соединено, идёт существенная работа по определению фактической реализации: зоны прокладки, технологические соединители, места размножения проводов и т.д. На стенде, т.к. он не летает, можно существенно упростить топологию кабельной сети. Подробности — ниже в описании подхода к проектированию стендов полунатурного моделирования. Пока лишь скажем, что при использовании dBricks и подхода, описанного ниже, можно:
Про модель информационного обмена dBricks
Описание каждого устройства в dBricks включает в себя коллекции функций и наполнений портов. Функции устройства определяют назначение и информационные потоки устройства. Каждая функция описывает одно из возможных назначений устройства.
Своя функция есть у каждого устройства, входящего в комплекс оборудования. Функция определяется собственно смысловым назначением и возможностями взаимодействия с функциями других устройств. В отсутствие назначения устройство становится ненужным. В отсутствие взаимодействия с другими устройствами устройство не должно входить в комплекс.
Функции могут содержать коллекцию параметров функций. Каждый параметр функции в первом приближении обладает следующими свойствами:
Про имитационный комплекс на базе ADS2
ADS2 – это комплексная, легко адаптируемая программная среда и аппаратная платформа реального времени для прототипирования, интеграции, тестирования, валидации и верификации бортового оборудования в аэрокосмической отрасли, разработанная компанией TechSAT.
Принципиальное устройство системы ADS2 включает в себя следующие компоненты:
Про аппаратуру ADS2
Типовой состав системы ADS2 состоит из следующих основных компонентов:
Базовый состав системы ADS2 легко масштабируем от небольшой настольной до большой распределенной системы. В случае необходимости наращивания функционала или изменения конфигурации системы ADS2 не потребуется изменение программного обеспечения самой системы за счет применения в ней однородной аппаратной и программной среды. Это очень важно учитывать в самом начале создания стенда. По нашему опыту в процессе эксплуатации необходимость изменения конфигурации системы возникает в самый неподходящий момент, поэтому не стоит недооценивать данный аспект.
Про структуру программного обеспечения ADS2
На схеме показаны основные компоненты программного пакета системы ADS2.
Рис. 4: Архитектура ПО ADS2
Как организован обмен данными посредством CVT в среде реального времени
CVT – таблица текущих значений, она определяет отдельные фрагменты данных, используемых различными частями системы, которыми в свою очередь обмениваются все приложения разного типа (пользовательские или внутренние приложения ADS2). Точки CVT — это наборы переменных, где каждая отдельная переменная имеет определенный набор атрибутов, которые характеризуют переменную и отражают ее предполагаемое использование. CVT и точки CVT — единственные средства, с помощью которых приложения могут обмениваться данными между собой. Точки CVT имеют сквозные названия для всей системы, таким образом, каждая точка имеет одно определение в данный момент времени. Каждая точка имеет следующие атрибуты:
Для приложений совершенно прозрачны функции других приложений, получают ли или передают ли другие приложения данные, и что именно они отправляют или ожидают получить. Приложения просто читают или записывают значения точек. Программное обеспечение ядра ADS2 отвечает за доставку данных туда, где они необходимы. При обмене точками CVT, помимо фактического значения, передаются и становятся доступными для приложений дополнительные данные: каждый элемент данных содержит метку времени, которая указывает, когда эти данные были созданы, и порядковый номер, указывающий, сколько раз они были созданы.
Само программное обеспечение ADS2 использует CVT для отображения определенных состояний системы и информации. Приложения драйвера ввода/вывода предоставляют определенные предустановленные точки CVT, которые единообразно используются во всех драйверах ввода/вывода для предоставления определенной информации подписавшимся приложениям.
Рис. 5: Обмен данными через CVT
Про организацию информационного обмена плат ввода/вывода и их конфигурацию
Архитектура системы ADS2 позволяет развязать между собой приложения (в т.ч. модели) и аппаратуру ввода/вывода (I/O channels). То есть приложения никогда не взаимодействуют непосредственно с физическим интерфейсом платы. Приложения общаются только с точками CVT. Взаимодействие точек CVT с физическими входными/выходными параметрами происходит автоматически под управлением ADS2. Настройка взаимодействия осуществляется с помощью конфигурационных таблиц (I/O map configuration). ADS2 поддерживает следующие виды плат ввода/вывода:
Рис. 6: Доступ к оборудованию через схему ввода/вывода (таблица конфигурации)
Фактический доступ к аппаратуре ввода/вывода производится приложениями с помощью драйверов с использованием конфигурационных таблиц, содержащих настройки конвертации данных от реальных интерфейсов устройств в точки CVT и обратно. В настоящий момент система поддерживает следующие драйверы:
Как применяется dBricks для конфигурации ADS2
Программный продукт dBricks используется для генерации следующих данных, необходимых для начала работы системы ADS2:
Точки CVT генерируются для всех входных и выходных параметров функции.
Пример: Функция «Flight Warning Application» блока «СС1» имеет три входных параметра и один выходной параметр:
Рис. 7: Пример конфигурации CVT
Связи точек CVT формируются на основе связей между параметрами функций в dBricks. Например, входной параметр «In_IRU1_Roll» приложения «Flight Warning Application» связан с выходным параметром «Out_Roll_Angle» функции «Main» блока «IRU1»:
Рис. 8: Связи точек CVT
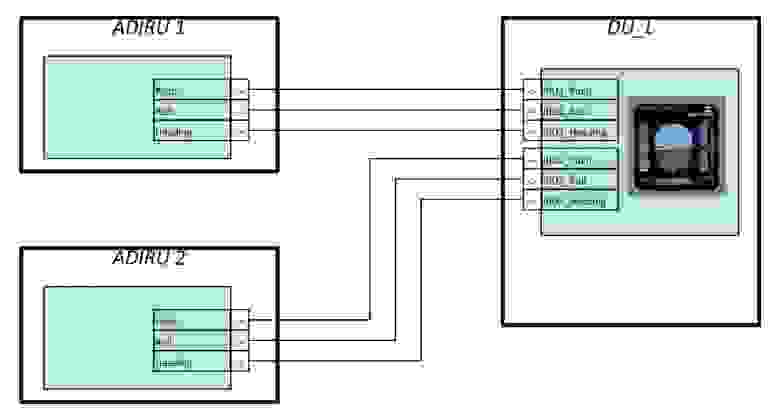
Конфигурационные таблицы ввода/вывода генерируются на основании «наполнения портов» в dBricks. Например, параметр Out_Roll_Angle передаётся посредством шины ARINC429 в слове 325, типа BNR (фиксированная точка), с младшим разрядом контейнера 11, размером контейнера 14, ценой старшего разряда 90, со знаком, время обновления 10мс. Такого описания достаточно для формирования файла конфигурации входов/выходов.
Рис. 9: Пример подключения объекта испытаний
Таким образом, на основании данных в dBricks пользователь может сформировать набор настроечных файлов, необходимых для создания конфигурации ADS2, которая будет состоять из сотен моделей и каналов входов/выходов, менее чем за 1 час.
Возможны и другие способы формирования конфигурационных таблиц CVT и таблиц CVT. Вышеуказанный способ часто используется и хорошо иллюстрирует предлагаемый подход.
Как применяется Simulink в ADS2
Simulink — это мощное программное средство, широко используемое в аэрокосмической отрасли. В системе ADS2 реализовано удобное и понятное взаимодействие с Simulink для разработки компьютерных моделей комплектующих изделий. В сочетании с использованием dBricks для хранения данных протоколов информационного взаимодействия, возможно создание интегрированной цепочки инструментов, существенно ускоряющей процесс разработки и отладки.
Широкое совместное применение Simulink и ADS2 возможно на основании следующих фактов:
Процесс разработки математических моделей реального времени с использованием Simulink выглядит следующим образом:
Часть 2. Стенды
Стенд полунатурного моделирования комплекса бортового оборудования (HIL Testing)
В соответствии с требованиями программы стенд может решать одну, несколько или все следующие задачи:
Какой имитационный комплекс применять
В качестве имитационного комплекса мы предлагаем применять решение на базе системы ADS2, поскольку это дает следующие возможности:
Одна из наиболее трудоемких задач при разработке стенда БРЭО – это конфигурация моделей систем и плат ввода/вывода. С помощью dBricks эта задача решается в течение часа. Единственное, что необходимо будет сделать — это назначить, какая из плат ввода/вывода системы ADS2 будет отвечать за какой канал имитируемого оборудования. После все необходимые конфигурационные файлы могут быть сформированы автоматически.
Про интеграцию сторонних имитаторов
Некоторые поставщики систем обеспокоены своим ноу-хау и отказываются предоставлять данные, необходимые для создания моделей их систем. Хороший пример — двигателисты. Обычно поставщики двигателей предоставляют свои имитаторы для обеспечения работы стенда. Эти имитаторы, как правило, подключаются к центральной системе моделирования стенда через Ethernet или в худшем случае через некоторые специальные интерфейсы, такие как «Reflective Memory». В любом случае ADS2 может поддержать любой интерфейс.
При проектировании стенда следует обратить внимание на то, какая именно послепродажная поддержка покрывается контрактом на поставку имитаторов. Поскольку разработчик стенда не может дорабатывать или ремонтировать эти имитаторы, то необходимо заручиться долгосрочным (10-15 лет) послепродажным обслуживанием и поддержкой поставляемых моделей (включая модернизацию, доработки и т.д.). Эта поддержка должна также учитывать такие проблемы, как стоимость запасных частей, стоимость и сроки ремонта, управление устареванием использованного оборудования, возможность обеспечить удаленную техническую поддержку, выезд полевого представителя, наличие системы обращений заказчика и т.д..
Как разработать кабельную сеть стенда полунатурного моделирования
Кабельная сеть – это одна из наиболее важных составляющих любого стенда. Подходы и инструменты, используемые для разработки и изготовления кабельной сети, могут иметь значительное влияние на график разработки и производство стенда. Мы применяем подход, который доказал свою эффективность в ряде различных проектов, вот его основные принципы:
Мы советуем применять в качестве разрывных коробок простейшие широко распространённые клеммные колодки WAGO 2002-1871 (или аналогичные с возможностью разрыва линии) с возможностью монтажа на DIN рейку.
Рис. 12: РК на базе клеммных колодок WAGO
Решение на базе клеммных колодок позволяет просто размножать соединения, если объединить несколько клеммных колодок WAGO в группу, как показано ниже:
Рис. 13.а: Пример конфигурации РК с применением колодок WAGO
Рис. 13.б: Пример конфигурации РК с применением колодок WAGO
Рис. 14: Пример подключения имитационного комплекса к двум типам разрывных коробок
Как создать макет кабины экипажа
Макет кабины экипажа, как правило, должен:
Первоначальный макет кабины экипажа
Первоначальный макет кабины экипажа может быть разработан на основании первоначального представления о кабине экипажа. При этом незначительные изменения штатной компоновки допускается не распространять на первоначальный макет кабины. Одновременно с этим конструкция первоначального макета кабины должна предоставлять технологический доступ к задним панелям устройств. Ниже приведен пример подобного первоначального макета кабины, следует отметить, что все боковые панели легкосъемные, а в целом конструкция – модульная.
Рис. 15: Первоначальный макет кабины экипажа
При возможности мы рекомендуем не применять поднятую платформу, хотя и есть как минимум две весомых причины её использовать для макета кабины:
Окончательный макет кабины – особенности сертификации воздушного судна
Окончательный макет кабины должен соответствовать размерам реальной кабины экипажа для соответствия сертификационным требованиям. В зависимости от состава проверок и подхода властей может возникнуть необходимость в создании дополнительного «окончательного» макета кабины экипажа, воспроизводящего реальную кабину. Для этой задачи рекомендуется применение реальных частей фюзеляжа с реальными местами установки оборудования, креслами пилотов и т.д. Например, для стенда «Электронная птица» программы SSJ-100 был применен образец реальной кабины экипажа, первоначально использовавшийся для отладки сборочной линии. Его невозможно было применить в реальном самолете, поскольку он не отвечал формальным требованиям производства, но полностью подходил для задач испытательного стенда.
Рис. 16: Макет кабины экипажа SSJ-100 на стенде «Электронная птица»
Какую систему имитации внешней визуальной обстановки использовать
Существует большое количество коммерчески доступных решений в области имитации внешней визуальной обстановки для летных тренажеров и испытательных стендов. Решения варьируются от простых дисплеев до высококлассных коллиматорных систем. По нашему опыту применение системы имитации внешней визуальной обстановки может потребоваться всего в двух ситуациях:
Большинство сертификационных испытаний проводится в наихудших возможных условиях видимости, что, как правило, означает применение правил полета по приборам и нулевой видимости. Единственный тип сертификационных испытаний, где действительно имеет значение качество системы имитации внешней визуальной обстановки, – это оценка минимумов взлёта/захода на посадку. Выполнение этих испытаний на стенде позволяет сэкономить 20-40 испытательных полетов. По нашему опыту, официальные органы не требовали применения высококлассной системы имитации для использования результатов стендовых испытаний в качестве средства подтверждения соответствия. В любом случае следует проконсультироваться с сертифицирующими органами, если эти испытания планируется проводить на стенде.
В реальной жизни инженеры почти не используют систему визуализации, поскольку они сосредоточены на поведении оборудования. Летчиков-испытателей обычно устраивает простейшая система имитации внешней визуальной обстановки. Система визуализации внешней обстановки может быть полезна для маркетинговой деятельности компании и формирования различных публикаций в прессе.
Таким образом, логичным представляется выбор решения с применением цилиндрической или сферической проекционной системы, что позволит обеспечить:
Как размещать объекты испытаний на стенде
Мы предлагаем применять коммерчески доступные телекоммуникационные стойки (серверные стойки) для размещения оборудования, которое штатно располагается вне кабины экипажа. Единственная сложность может быть вызвана необходимостью размещения оборудования, требующего принудительного охлаждения. Эта проблема может быть решена несколькими путями:
Как создать систему распределения энергии
Система распределения энергии предназначена для распределения электропитания ОИ. Она копирует систему СЭС установленную на летательном аппарате.
Преобразование 115В переменного тока в 28В постоянного и 115В 400 Гц не представляет сложности, поскольку на рынке доступно большое количество готовых решений. Поэтому это не является предметом данного описания.
Мы применяем следующий подход:
Стенд быстрого прототипирования бортового оборудования (MIL Testing)
Какой имитационный комплекс применять
В качестве имитационного комплекса для стенда быстрого прототипирования мы предлагаем применять решение на базе системы ADS2 по тем же причинам, что и для стенда полунатурного моделирования.
Как разрабатывать математические модели
Любой испытательный стенд развивается по мере продвижения проекта. Следовательно, никто не может предложить «полный» или «лучший» набор моделей для разработки. Чтобы стенд быстрого прототипирования был полезен на протяжении всего срока проекта и при этом требовал разумных трудовых вложений, надо проявить гибкость и попытаться использовать подход в стиле принципа Парето. Тем не менее, мы попытаемся привести примеры «начального» и «расширенного» набора моделей, чтобы проиллюстрировать усредненный случай.
Первоначальный набор моделей в нашем примере предназначен для поддержания следующих работ:
| № | Модель | Средство разработка | Размещение модели в имитационном комплекса | Описание |
| 1 | Модель движения летательного аппарата | Simulink | ПЭВМ РВ | Простая жесткая модель ЛА. Опыт показывает, что решения, подобные XPlane, недостаточно точны для построения соответствующих законов управления. Простая модель Simulink должна быть основана на тщательном численном моделировании аэродинамики в сочетании с результатами испытаний в аэродинамической трубе. |
| 2 | Модель атмосферы | Simulink | ПЭВМ РВ | Включает стандартную атмосферу, моделирование ветра, простое моделирование атмосферных аномалий. |
| 3 | Упрощенная модель двигателя | Simulink | ПЭВМ РВ | Прямая связь между ручкой управления и тягой. |
| 4 | Упрощенная электроника управления полетом | Simulink | ПЭВМ РВ | Без резервирования, без кворумирования сигналов, без дополнительных датчиков (например, гидравлики). |
| 5 | Упрощенные приводы поверхностей управления полетом | Simulink | ПЭВМ РВ | Отсутствие зависимости от источника энергии (гидравлики и электричества), отсутствие обратной связи от аэродинамических сил |
| 6 | Упрощенные датчики систем воздушных сигналов и пространственной ориентации | Simulink | ПЭВМ РВ | Без резервирования, без моделей ошибок. |
| 7 | PFD simulation | C++ или Python | ПЭВМ имитации органов управления и индикаторов | Без избыточности, без контроля работоспособности, без реконфигурации, без навигации, без данных TAWS или TCAS |
«Продвинутый» набор моделей должен поддерживать следующие работы:
Для плавного перехода между начальным и расширенным набором моделей должны быть соблюдены следующие критерии для систем моделирования:
Как создать макет кабины
Как правило мы использовали следующий подход для макета кабины стендов MIL:
Рис. 17 Концепция макета кабины
Конструкция стенда очень проста, когда понимаешь, почему то или иное решение было принято. Данный материал создан на основании многолетнего труда, а также опыта применения удачных и неудачных технических решений.
Прямо сейчас мы активно участвуем в создании стенда полунатурного моделирования для небольшого летательного аппарата. Для данного проекта в качестве основы имитационного комплекса было предложено использовать новую отечественную разработку РИТМ производства одноименной компании. Опыта работы с РИТМ у нас нет, но ведь всё бывает впервые.
Вот что нам известно на текущий момент об этом решении:
По результатам нашей работы мы обязательно поделимся своим опытом применения РИТМ в реальном проекте.



