Поляризованные электромагнитные реле
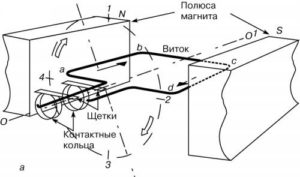
 Поляризованные электромагнитные реле отличаются от нейтральных электромагнитных реле способностью реагировать на полярность управляющего сигнала. Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный магнит 1. Поляризующий магнитный поток Ф0 проходит по якорю 2, разветвляется на два потока Ф1 и Ф2 в воздушных зазорах δ1 и δ 2 и замыкается по сердечнику 4. Для увеличения быстродействия реле сердечник собран из листовой электротехнической стали.
Поляризованные электромагнитные реле отличаются от нейтральных электромагнитных реле способностью реагировать на полярность управляющего сигнала. Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный магнит 1. Поляризующий магнитный поток Ф0 проходит по якорю 2, разветвляется на два потока Ф1 и Ф2 в воздушных зазорах δ1 и δ 2 и замыкается по сердечнику 4. Для увеличения быстродействия реле сердечник собран из листовой электротехнической стали.
Якорь также собран из двух пластинок электротехнической стали и подвешен на стальной пружинке. Поток управления Фу создается двумя намагничивающими обмотками 5, расположенными на сердечнике.
Контактная система 3 реле имеет один переключающий контакт. Положение неподвижных контактов можно регулировать, изменяя настройку реле.
Если в обмотках ток отсутствует, то под действием силы притяжения, созданной потоком Ф0, якорь может находиться в одном из крайних положений, например в левом, как показано на рис. 1, а.
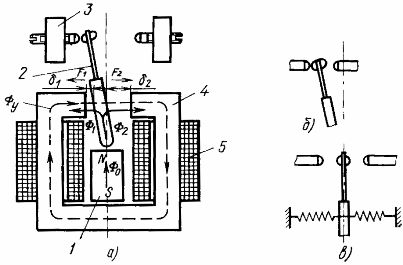
Рис. 1. Поляризованное электромагнитное реле
Потоки Ф1 и Ф2 обратно пропорциональны величине воздушных зазоров δ 1 и δ 2 между якорем и соответствующим полюсом сердечника. В среднем нейтральном положении потоки Ф1 и Ф2 одинаковы, и силы притяжения якоря к обоим полюсам сердечника равны: F1=F2. Однако это промежуточное положение сердечника неустойчиво. При смещении якоря влево поток Ф1 усиливается, а поток Ф2 ослабевает и происходит соответствующее перераспределение силы притяжения между полюсами: F1>F2.
Действие тока управления зависит от его полярности. Для переключения реле необходим ток, который создает в зазоре магнитный поток Фу, совпадающий по направлению с потоком Ф2. Ток обратной полярности усилит поток Ф1 и приведет только к увеличению контактного нажатия.
Для срабатывания реле поток Фу должен превысить максимальное значение потока Ф1 при минимальном значении зазора δ.
По мере движения якоря вправо зазор δ 1 увеличивается, поток Ф1 и его противодействующее влияние уменьшаются. В среднем положении наступает динамическое равновесие, после чего возросший поток Ф2 создает дополнительную силу, ускоряющую якорь. Это повышает быстродействие поляризованных реле. Для возврата контактной системы в начальное положение необходимо опять изменить полярность тока в управляющей обмотке.
Поляризованное реле, имеющее такую настройку, называется двухпозиционным. Оно переключается под действием разнополярных импульсов, причем после прекращения действия управляющего импульса контактная система реле не возвращается в исходное состояние.
В двухпозиционных поляризованных реле с преобладанием один из неподвижных контактов выдвинут за нейтральную линию (рис. 1, б). Такое реле реагирует на управляющие импульсы только определенной полярности и возвращается в исходное положение, когда управляющий импульс снят.
Существуют трехпозиционные поляризованные реле (рис. 1, в), в которых якорь удерживается пружинками в нейтральном положении. В зависимости от полярности управляющего сигнала замыкается левый или правый контакт реле. При прекращении входного сигнала якорь возвращается в исходное нейтральное положение. Такое реле эквивалентно двум поляризованным реле с преобладанием.
Поляризованные реле обладают большой чувствительностью. Мощность срабатывания реле составляет 0,01—5,0 мВт.
Высокое быстродействие допускает работу поляризованных реле с частотой включения 100—200 Гц.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Управление бистабильным поляризованным реле с двумя обмотками постоянным (логическим) уровнем

Как следует из названия, эти реле имеют два стабильных положения якоря. Это означает, что для перевода реле в другое стабильное состояние, на соответствующую обмотку необходимо подать короткий переключающий импульс. В промежутке между переключающими импульсами реле обесточено и энергии не потребляет.
Это относится к реле с двумя обмотками, существуют поляризованные реле с одной обмоткой. У них для перевода реле в другое стабильное состояние требуется кратковременно подать импульс противоположной полярности. Это требует усложнения схемы (применение Н-моста), и в данной статье не рассматривается.
Общим для всех бистабильных поляризованных реле является то, что это реле импульсные. Т.е. управлять ими нужно короткими импульсами. Подача постоянного напряжения на обмотку импульсного реле в течении достаточно долгого времени способна вывести его из строя. Обычно это зафиксировано в паспорте реле. Импульсное же управление зачастую приводит к неоправданому переусложнению схемы устройства.
Ниже приведен схемотехнический прием для управления импульсным реле постоянным уровнем.

Можно заметить, что элементы DD1 включены по схеме «исключающее ИЛИ-НЕ» с выводами от промежуточных элементов и интегрирующей цепью R1C1 на входе обратной связи. Элемент DD1.4 в работе схемы не участвует и служит только о сигнализации о нештатных (аварийных) ситуациях.
Не буду здесь приводить таблицу истинности элемента «исключающее ИЛИ-НЕ», приложу проект Proteus (XOR-NOT.zip), желающие могут составить ее самостоятельно.

О назначении интегрирующей цепи R1C1. На время переключения контактов реле один вход составного элемента «повисает» в воздухе. Это может привести к неработоспособности схемы или паразитной генерации. Поэтому на время переключения этот вход «исключающее ИЛИ-НЕ» удерживается в предыдущем состоянии за счет инерционности С1. Постоянная времени цепи R1C1 влияет только на время перезарядки через контакты реле. А вот постоянная времени С1+«Входное сопротивление двух логических элементов» должна превышать время переключения контактов. Расчитать его проблематично, нужно подбирать на макетке. Но и завышать его не нужно, от него зависит время токопотребления реле. Нагрузочная способность выходов примененных логических элементов тут не влияет, т.к. зарядка/разрядка конденсатора С1 производится через контакты реле.
О необходимости элемента DD1.4. Он нужен только для генерации сигнала ошибки при неисправности реле. Короткие импульсы на время переключения глазом не фиксируются. Если у вас модуль с одиночным реле, сигнализацию можно сделать так (Рис. 1):

Если же модулей несколько, сигнал ошибки можно обьединить (Рис. 2).
Наглядный пример как это работает в Proteus, на входе логический 0:

На входе логический 1:

Хорошо видно, что в обоих случаях обмотки реле обесточены, токопотребление схемы определяется ничтожным статическим током КМОП микросхемы.
Недостаток данной схемы в требовании применения двухкатушечного бистабильного реле с «лишним» переключающим контактом для обратной связи.
Приложены (примеры для Proteus 7):
Xor-not.zip — учебный пример для понимания логики работы элемента «исключающее ИЛИ-НЕ»;
PLBI_Direct.zip — пример применения бистабильного реле в данной схеме;
Поляризованные реле в схемах на микроконтроллере
Механические реле общего применения не требуют, чтобы соблюдалась полярность подаваемого на обмотку рабочего напряжения. Однако имеются реле, у которых на корпусе возле отводов катушки индуктивности отмаркированы знаки «+» и «—». Казалось бы, зачем? Дело в том, что такие реле внутри содержат постоянный магнит и специальную механику. Они обладают повышенной чувствительностью, низким током срабатывания и малыми габаритами. Если «перепутать» полярность подачи напряжения, то контакты реле не переключатся, хотя ток от источника питания по катушке индуктивности будет протекать исправно.
Различают следующие разновидности поляризованных реле (polarized relay):
• однообмоточные одностабильные (monostable);
• двухобмоточные двустабильные (dual coil latching);
• однообмоточные двустабильные (single coil latching).
Одностабильные поляризованные реле аналогичны по логике работы обычным механическим реле, но у нихдолжна соблюдаться полярность подачи напряжения на обмотку. Достоинство — улучшенные параметры и малые габариты.
Двустабильные реле, изменив своё состояние под воздействием входного параметра, после устранения воздействия не изменяют состояния до приложения другого воздействия. Другими словами, такое реле можно переключать коротким импульсом 5…250 мс, после чего оно перестаёт потреблять энергию.
Двухобмоточное реле, по определению, содержит две раздельные поляризованные обмотки. Первая из них (обмотка прямого включения), замыкает, а вторая (обмотка обратного включения) — размыкает контакты. Однообмоточное двустабильное реле имеет специальную конструкцию, которая перебрасывает контакты каждый раз после смены полярности подаваемого рабочего напряжения.
Недостатком двустабильных поляризованных реле является их низкая устойчивость к механическим ударам, от воздействия которых положение «ВКЛ» может случайным образом измениться на положение «ВЫКЛ», и наоборот.
Подача постоянного напряжения на двустабильные поляризованные реле не рекомендуется, однако, если это произошло, то время воздействия должно быть минимальным, например, не более минуты, чтобы не перегрелись обмотки.
На Рис. 2.115, a…r приведены схемы подключения поляризованных реле к MK.

Рис. 2.115. Схемы подключения поляризованных реле к MK:
а) ВЫСОКИМ уровнем на выходе MK включается одностабильное поляризованное реле K1 фирмы FIC. Время воздействия рабочего напряжения не ограничено;
б) на выходе MK формируются прямоугольные импульсы положительной полярности длительностью 1 с и периодом повторения 1.2 с, при этом каждый раз срабатывает двустабильное поляризованное реле Kl (контакты перебрасываются в другое положение). Буферные иверторы DD1.1, DD12 сокращают число требуемых линий MK и защищают порты от всплесков напряжения, которые возникают при коммутации реле. Одна из обмоток реле постоянно включена, поэтому устройство должно быть рассчитано на непродолжительную работу с перерывами;
в) аналогично Рис. 2.115, б, но с повышенным напряжением питания +12 В и с раздельным управлением обмотками реле Kl отдвух выходов MK. Перерывы в работе не требуются;
г) коммутация полярности напряжения, подаваемого на однообмоточное двустабильное поляризованное реле Kl, при помощи мостовой схемы на транзисторах VT1…VT4.
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).
Принцип действия поляризованного реле
В электрических цепях широко используются различные виды реле. Они производят замыкание и размыкание цепи на различных участках при условии изменений электрических, механических и других величин на входе этих устройств. Все приборы этого типа различаются между собой по сигналу управления. Среди них, часто применяется поляризованное реле, принцип действия которого такой же, как и на электромагнитных выключателях.
Основные виды электромагнитных реле
Главным назначением этих устройств является коммутация при больших токах нагрузки. Иначе говоря, они выполняют функции переключателей, которые посредством слабых токов включают цепи с большими токами. Если такую цепь включать напрямую без реле, то проводка и кнопка просто не выдержит высоких токов и расплавится. Реле принимает на себя большую токовую нагрузку и производит коммутацию с помощью мощных контактов.
Электромагнитные выключатели разделяются на две основные группы:
В отличие от нейтральных, электромагнитные поляризованные устройства способны срабатывать в зависимости от полярности управляющего сигнала. Для изготовления сердечника используется электротехническая листовая сталь, что позволяет значительно увеличить быстроту действия прибора.
Действие поляризованных устройств
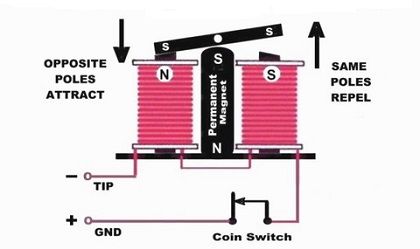
При отсутствии тока в обмотках, устройство находится в исходном положении. Однако в нем уже имеется магнитный поток, создаваемый постоянным магнитом. Происходит замыкание силовых линий на два контура прибора. Первый контур состоит из самого магнита, ярма, левого сердечника, якоря и снова магнита. Другой контур проходит через магнит и ярмо к правому сердечнику и якорю, а затем вновь возвращается в исходную точку.
Между якорем и левым сердечником полностью отсутствует воздушная прослойка. При этом якорь и правый сердечник разделен значительным зазором. Из-за большого сопротивления воздуха значение магнитного потока в правом контуре будет значительно ниже, чем в левом. Поэтому якорь будет притягиваться к левому сердечнику более сильным магнитным потоком.
Таким образом, работает поляризованное реле, принцип действия которого основан на магнитных свойствах. Это позволяет изменять направление тока, подаваемого на обмотку, при прямой и обратной полярности.
Магнитный пускатель: принцип действия

Реле-регулятор напряжения: принцип действия

Герконовое реле: принцип действия
Генератор постоянного тока: устройство и принцип действия
Принцип действия синхронного двигателя
Трансформаторы тока назначение и принцип действия
Что такое поляризованное двустабильное реле
Реле — электрическое или электронное устройство (ключ), предназначенное для замыкания или размыкания электрической цепи при заданных изменениях электрических или неэлектрических входных воздействий.
Обычно под этим термином подразумевается электромагнитное реле — электромеханическое устройство, замыкающее и/или размыкающее механические электрические контакты при подаче в обмотку реле электрического тока, порождающего магнитное поле, которое вызывает перемещения ферромагнитного якоря реле, связанного механически с контактами и последующее перемещение контактов коммутирует внешнюю электрическую цепь.
Основные части электромагнитного реле: электромагнит, якорь и переключатель. Электромагнит представляет собой электрический провод, намотанный на катушку с ярмом из ферромагнитного магнитомягкого материала. Якорь это обычно пластина из магнитного материала, через толкатели воздействующая на контакты.
Рис 1. Принцип действия реле, сверху — нормальное (обесточенное) состояние реле, снизу — включённое состояние реле.
1 — электромагнит (обмотка с ферромагнитным сердечником); 2 — подвижный якорь; 3 — контактная система (переключатель).
1.11.2. Электромагнитное реле постоянного тока.
Электромагнитные реле являются наиболее распространенными из группы электромеханических реле и получили широкое применение в устройствах автоматики, телемеханики и в вычислительной технике.
Если реле используются для переключения мощных цепей тока, то они называются контакторами. Реле и контакторы являются устройствами прерывистого действия. Электромагнитные реле по роду используемого тока делятся:
Реле постоянного тока подразделяются:
Нейтральные реле одинаково реагируют на постоянный ток обоих направлений, протекающий по его обмотке (т. е. положение якоря не зависит от направления тока в обмотке реле). Поляризованное реле реагирует на полярность сигнала. По характеру движения якоря нейтральные электромагнитные реле подразделяются на два типа:
На рисунке изображены реле с угловым перемещением якоря (а) и с втягивающим якорем (б).

Рис 2. Разновидности конструктивных схем реле:
1 – каркас с обмоткой; 2 – ярмо; 3 – выводы обмотки; 4 – колодка; 5 – контактные пружины;
6 – замыкающий контакт ЗК; 7 – подвижный контакт; 8 – размыкающий контакт РК; 9 – якорь; 10 – штифт отлипания; 11 – сердечник
При отсутствии управляющего сигнала якорь удален от сердечника на максимальное расстояние за счет возвратной пружины. В этом случае одна пара контактов замкнута (размыкающие контакты РК), а другая пара разомкнута (замыкающие контакты ЗК).
Принцип действия реле, изображенного на рисунке основан на следующем: при подаче тока в обмотку (катушку) создается магнитный поток, который, проходя через сердечник, ярмо, якорь и воздушный зазор δН(0), создает магнитное усилие, притягивающее якорь к сердечнику. При этом якорь, воздействуя на колодку, перемещает ее таким образом, что контакты ЗК замыкаются, а РК размыкаются. В некоторых конструкциях реле якорь при выключении тока под действием собственного веса возвращается в исходное положение. Таким образом, электромагнитное реле состоит из трех основных частей:
Магнитную цепь составляют сердечник, якорь, ярмо и воздушный зазор между якорем и сердечником.
При детальном рассмотрении работы реле в процессе срабатывания и отпускания наблюдаются четыре этапа.
 .
.
 .
.
 .
.
1.11.3. Поляризованное реле.
В отличие от рассмотренных ранее нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного усилия зависит от полярности сигнала постоянного тока в обмотке. Поляризация таких реле осуществляется при помощи постоянного магнита.
Существует много конструктивных разновидностей поляризованных реле, которые классифицируются по ряду признаков. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями, по числу обмоток управления – одно- и многообмоточные, по способу настройки контактов (по числу устойчивых положений якоря) различают двух- и трехпозиционные.
Поляризованные реле получили большое распространение в маломощной автоматике, особенно в следящих системах при управлении реверсивными двигателями.
К числу достоинств поляризованных реле относятся:
К недостаткам по сравнению с нейтральными электромагнитными реле относятся:
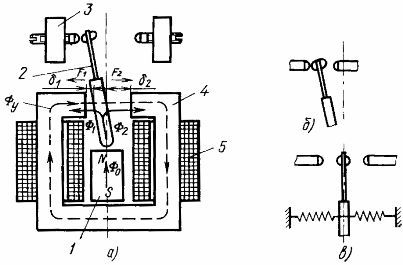
В поляризованных реле, как было отмечено, используют дифференциальные и мостовые схемы магнитных цепей, которые имеют много разновидностей (название цепей связано с типом электрической схемы замещения электромагнитной системы). На рисунке изображено поляризованное реле с дифференциальной схемой магнитной цепи.

Рис 3. Поляризованное реле ( а ) и способы настройки контактов ( б, в ) : 1, 1’ – намагничивающие катушки; 2 – ярмо; 3 – постоянный магнит; 4 – якорь; 5, 5’ – контакты
В данном случае якорь перекинется из левого положения в правое. При выключении сигнала якорь будет находиться в том положении, которое он занимал до выключения сигнала. Таким образом, результирующее электромагнитное усилие, действующее на якорь, будет направлено в сторону того зазора, где магнитные потоки суммируются.
Если теперь в обмотке 1 и 1′ (см рисунок а ) подать управляющий сигнал Iср такой величины, чтобы Фэ=∆Ф (  ), то при незначительном возрастании тока якорь перебросится в правое положение, так как, очевидно, правое усилие будет больше левого.
), то при незначительном возрастании тока якорь перебросится в правое положение, так как, очевидно, правое усилие будет больше левого.
Магнитные потоки до момента переброски якоря будут соответственно равны:


После перехода якоря за нейтральную линию перераспределяющийся поток Ф0(п) создает дополнительное усилие, необходимое для перемещения якоря. Этим и объясняется, что поляризованные реле имеют незначительное время срабатывания, не превышающее нескольких миллисекунд. Кроме того, дополнительное усилие, сжимая контакты, позволяет при очень малой величине управляющего сигнала управлять относительно мощными электрическими цепями, т. е. коэффициент управления имеет значительную величину (до 5000), чего не достигает ни одно нейтральное реле.
Обычно отклонение якоря от нейтрали составляет 0,05–0,1 мм.

Рис 4. Поляризованное реле с мостовой схемой магнитной цепи.
Трехпозиционное реле имеет симметрично расположенные от нейтральной линии неподвижные контакты (рис. в ). Якорь при отсутствии управляющего сигнала удерживается в среднем положении с помощью специальных пружин (с двух сторон) или закрепляется на плоской пружине, упругость которой, создает устойчивое положение равновесия в среднем положении. При подаче сигнала в управляющую обмотку контакт на якоре замыкается с левым или правым контактом (в зависимости от полярности сигнала) и возвращается в нейтральное положение после снятия сигнала.
Поляризованные реле находят широкое применение в схемах автоматики благодаря своим характерным особенностям. Наличие нескольких обмоток позволяет использовать их в качестве логических элементов, небольшая мощность срабатывания – в качестве элементов контроля небольших электрических сигналов, малое время срабатывания и чувствительность к полярности входных сигналов – в качестве амплитудных модуляторов и демодуляторов. Благодаря высокой чувствительности поляризованные реле часто используют в маломощных цепях переменного тока с включением через выпрямитель.
1.11.4. Электромагнитное реле переменного тока.
В тех случаях, когда основным источником энергии является сеть переменного тока, желательно применять реле, обмотки которых питаются переменным током. При подаче в обмотку реле переменного тока якорь будет притягиваться к сердечнику так же, как и при постоянном токе. При одинаковых конструктивных размерах реле и равных значениях максимальной индукции среднее значение электромагнитного усилия у реле переменного тока вдвое меньше, чем у реле постоянного тока.
Электромагнитное усилие меняется (пульсирует) с удвоенной частотой 2ω, обращаясь в нуль дважды за период питающего напряжения. Следовательно, якорь реле может вибрировать, периодически оттягиваться от сердечника возвратной пружиной, что вызывает дрожание якоря и, как следствие, износ оси якоря.
Реле переменного тока имеют худшие параметры, чем реле постоянного тока, так как при одинаковых размерах имеют меньшее электромагнитное усилие и менее чувствительны. Кроме того, они сложнее и дороже, поскольку необходимо иметь шихтованный магнитопровод (набранный из отдельных листов, а также применять специальные меры для устранения вибрации якоря – явление, которое нежелательно, так как может привести к обгоранию контактов, прерыванию электрической цепи и др. поэтому для ослабления вибрации принимают специальные конструктивные меры.

Рис 5. Двухфазное реле переменного тока: 1 – магнитопровод; 2 – катушка; 3 – якорь

Рис 6. Реле переменного тока с короткозамкнутым витком.
1.11.5. Тепловое реле.
Принцип действия тепловых реле
Долговечность энергетического оборудования в значительной степени зависит от перегрузок, которым оно подвергается во время работы. Для любого объекта можно найти зависимость длительности протекания тока от его величины, при которых обеспечивается надежная и длительная эксплуатация оборудования. При номинальном токе допустимая длительность его протекания равна бесконечности. Протекание тока, большего, чем номинальный, приводит к дополнительному повышению температуры и дополнительному старению изоляции. Поэтому чем больше перегрузка, тем кратковременнее она допустима. Кривая 1 на рисунке устанавливается исходя из требуемой продолжительности жизни оборудования. Чем короче его жизнь, тем большие перегрузки допустимы.
При идеальной защите объекта зависимость tср (I) для теплового реле должна идти немного ни-же кривой для объекта.
Для защиты от перегрузок, наиболее широкое распространение получили тепловые реле с биметаллической пластиной.
Время-токовые характеристики теплового реле и защищаемого объекта.
Биметаллическая пластина теплового реле состоит из двух пластин, одна из которых имеет больший температурный коэффициент расширения, другая — меньший. В месте прилегания друг к другу пластины жестко скреплены либо за счет проката в горячем состоянии, либо за счет сварки. Если закрепить неподвижно такую пластину и нагреть, то произойдет изгиб пластины в сторону материала с меньшим. Именно это явление используется в тепловых реле.
Широкое распространение в тепловых реле получили материалы инвар и немагнитная или хромоникелевая сталь.
Нагрев биметаллического элемента теплового реле может производиться за счет тепла, выделяемого в пластине током нагрузки. Очень часто нагрев биметалла производится от специального нагревателя, по которому протекает ток нагрузки. Лучшие характеристики получаются при комбинированном нагреве, когда пластина нагревается и за счет тепла, выделяемого током, проходящим через биметалл, и за счет тепла, выделяемого специальным нагревателем, также обтекаемым током нагрузки.
Прогибаясь, биметаллическая пластина своим свободным концом воздействует на контактную систему теплового реле.

Время-токовые характеристики теплового реле.
Основной характеристикой теплового реле является зависимость времени срабатывания от тока нагрузки (времятоковая характеристика). В общем случае до начала перегрузки через реле протекает ток Iо, который нагревает пластину до температуры qо.
При проверке времятоковых характеристик тепловых реле следует учитывать, из какого состояния (холодного или перегретого) происходит срабатывание реле.
При проверке тепловых реле надо иметь в виду, что нагревательные элементы тепловых реле термически неустойчивы при токах короткого замыкания.
Влияние температуры окружающей среды на работу теплового реле.
Нагрев биметаллической пластинки теплового реле зависит от температуры окружающей среды, поэтому с ростом температуры окружающей среды ток срабатывания реле уменьшается.
При температуре, сильно отличающейся от номинальной, необходимо либо проводить дополнительную (плавную) регулировку теплового реле, либо подбирать нагревательный элемент с учетом реальной температуры окружающей среды.
Для того чтобы температура окружающей среды меньше влияла на ток срабатывания теплового реле, необходимо, чтобы температура срабатывания выбиралась возможно больше.
Для правильной работы тепловой защиты реле желательно располагать в том же помещении, что и защищаемый объект. Нельзя располагать реле вблизи концентрированных источников тепла — нагревательных печей, систем отопления и т. д. В настоящее время выпускаются реле с температурной компенсацией (серии ТРН).
Конструкция тепловых реле.
Прогиб биметаллической пластины происходит медленно. Если с пластиной непосредственно связать подвижный контакт, то малая скорость его движения, не сможет обеспечить гашение дуги, возникающей при отключении цепи. Поэтому пластина действует на контакт через ускоряющее устройство. Наиболее совершенным является «прыгающий» контакт.
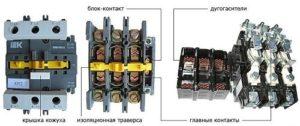
В обесточенном состоянии пружина создает момент относительно точки 0, замыкающий контакты 2. Биметаллическая пластина 3 при нагреве изгибается вправо, положение пружины изменяется. Она создает момент, размыкающий контакты 2 за время, обеспечивающее надежное гашение дуги. Современные контакторы и пускатели комплектуются с тепловыми реле ТРП (одно-фазное) и ТРН (двухфазное).
Тепловые реле ТРП.
Тепловые токовые однополюсные реле серии ТРП с номинальными токами тепловых элементов от 1 до 600 А предназначены главным образом для защиты от недопустимых перегрузок трехфазных асинхронных электродвигателей, работающих от сети с номинальным напряжением до 500 В при частоте 50 и 60 Гц. Тепловые реле ТРП на токи до 150 А применяют в сетях постоянного тока с номинальным напряжением до 440 В.
Тепловые реле РТЛ.
Тепловые реле РТТ Реле тепловое РТЛ предназначено для обеспечения защиты электродвигателей от токовых перегрузок недопустимой продолжительности. Они также обеспечивают защиту от не симметрии токов в фазах и от выпадения одной из фаз. Выпускаются электротепловые реле РТЛ с диапазоном тока от 0.1 до 86 А.
Тепловые реле РТТ.
Реле тепловые РТТ предназначены для защиты трехфазных асинхронных электродвигателей с короткозамкнутым ротором от перегрузок недопустимой продолжительности, в том числе возникающих при выпадении одной из фаз, а также от не симметрии в фазах.
Реле РТТ предназначены для применения в качестве комплектующих изделий в схемах управления электроприводами, а также для встройки в магнитные пускатели серии ПМА в целях переменного тока напряжением 660В частотой 50 или 60Гц, в целях постоянного тока напряжением 440В.



