Что такое пвм вентилятор
Непонимание работы ШИМ или PWM ( Pulse-width modulation ) часто приводит не только к их неправильному использованию, но даже к ошибкам в проектировании устройств использующих ШИМ для управления. Здесь, ограничившись конкретным применением, я попытаюсь рассказать что такое ШИМ, для чего она требуется и как работает.
Сначала, что такое ШИМ.
| Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM)) — управление средним значением напряжения на нагрузке путём изменения скважности импульсов, управляющих ключом. |
Когда нужна ШИМ
Главной причиной применения ШИМ является необходимость обеспечить пониженным постоянным напряжением силовых устройств электроники при сохранении высокого КПД, особенно в управляемых электроприводах.
Во внутренних сетях аппаратуры для питания устройств используется постоянное напряжение ограниченного набора напряжений, которые часто требуется изменить под требования конкретного устройства, стабилизировать или регулировать его. Это могут быть электроприводы постоянного тока, чипы, узлы радиоаппаратуры.
Регулировку можно осуществлять с помощью гасящих напряжение устройств: резисторов, транзисторов (если требуется регулировка). Главный недостаток такого решения потери мощности и повышенное тепловыделение на регулирующих устройствах.
Поскольку известно что выделяемая мощность равна :
P = I x U или P = I 2 x R Вт.
Это относится к гасящим резисторам и полупроводниковым приборам тоже.
Но хорошо известно, что полупроводниковые приборы очень хорошо (с малыми потерями и тепловыделением) работают как ключи, когда имеют только два состояния открыт/закрыт.
Этот режим позволяет снизить потери на коммутирующем полупроводниковом приборе до уровня:
U нас для современных полупроводниковых коммутаторов приближается к 0,3 v и при потребляемых токах 10 А потери мощности будут приближаться к 3 Вт. Это в режиме ключа, а при работе в устройствах ШИМ и меньше.
| В ШИМ в качестве ключевых элементов использует полупроводниковые приборы в ключевом режиме, то есть транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет почти бесконечное сопротивление, поэтому ток в цепи весьма мал, и, хотя всё напряжение питания падает на транзисторе, выделяемая на транзисторе мощность практически равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность также мала. В переходных состояниях (переход ключа из проводящего состояния в непроводящее и обратно) мощность выделяемая в ключе значительна, но так как длительность переходных состояний крайне мала, по отношению к периоду модуляции, то средняя мощность потерь на переключение оказывается незначительной. |
Реализовать преимущества ключевого режима в схемах понижающих и регулирующих напряжение постоянного тока, позволило использование ШИМ.
Повторюсь, широтно-импульсная модуляция — управление средним значением напряжения на интегрирующей нагрузке путём изменения скважности импульсов, с помощью управляющего ключа.
Работа ШИМ на интегрирующую нагрузку показана на рис. 1.
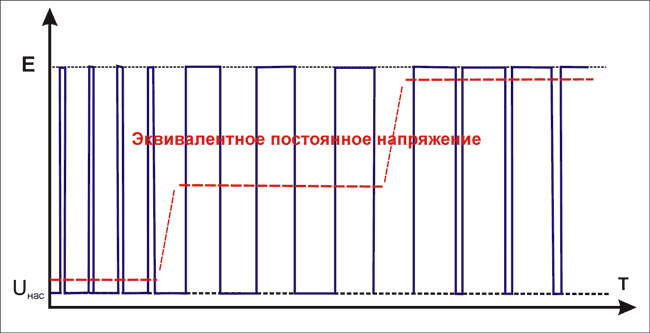
Главным условиям такого применения ШИМ является наличие интегрирующей нагрузки.
Это могут быть интегрирующая RC, LC, RLC или RL цепи и механические интеграторы (например электромотор).
С учетом скважности эквивалентное постоянное напряжение будет равно:
E экв = Q x E Вольт
Мощность выделяемая на управляющем ключе, управляемом ШИМ равна:
Схема подключения нагрузки к ШИМ.
Никаких отличных от схемы включения электродвигателя на постоянном токе (частный случай нагрузки) схемных решений ШИМ не требует. Просто электродвичатель подключается к источнику питания работающего в режиме ШИМ. Разве что, в определенных ситуациях требуется ввести дополнительную фильтрацию помех возникающих на фронтах импульсов. Этот фильтр на рис. 2 в виде конденсаторов и демпфирующего диода.
На рис. 2 показано такое подключение.
Мы видим, что коммутатор (полевой транзистор) можно просто заменить на переменный резистор.
Схема PWM
В данной схеме управление возможно скорее постоянным током +I упр, чем ШИМ сигналом.
Для управления импульсным (ШИМ) сигналом требуется схема изображенная на рис. 4. Да и судя по параметрам транзистора «PWM» он выбирался именно для управления постоянным током. По крайней мере он будет нормально работать в таком режиме с вентилятором до 1,6 Вт.
Основные параметры кремниевого биполярного высокочастотного n-p-n транзистора BC879 от SIEMENS
| Pc max | Ucb max | Uce max | Ueb max | Ic max | Tj max, °C | Ft max |
| 800mW | 100V | 80V | 5V | 1A | 150°C | 200MHz |
Есть другой вариант схемы вентилятора с P WM на форуме Radeon.ru
Данная схема вполне работоспособна и не имеет недостатков схемы показанной на рис. 3.
Вниманию самодельщиков!
Я бы не рекомендовал применение вентиляторов имеющих встроенный PWM (4- pin ) одновременно с какими либо иным регуляторам оборотов вентилятора.
В случае если Вас не устраивает алгоритм управления PWM встроенного на материнскую (системную) плату.
И у Вас есть устраивающий Вас реобас (контроллер управления вентилятором), то используйте вентилятор с 3-pin соединитель.
Но помните применение вентилятора с PWM в любом нештатном режиме не позволит достичь его максимальной производительности.
Заключение
ШИМ позволяет создавать компактные системы регулируемого электропривода постоянного тока большой мощности.
В современных устройствах постоянного тока управляющих напряжением и понижающих стабилизаторах напряжениях обычно регулировки выполняются с помощью ШИМ. Для этого выпускаются контроллеры требующие минимум навесных элементов.
Как и почему необходимо управлять скоростью вращения компьютерных вентиляторов
В последнее время тема использования интегральных схем для контроля скорости вращения вентиляторов в системах активного охлаждения компьютерных комплектующих и прочих электронных систем стала очень актуальна. Вследствие инициатив крупнейших игроков IT-рынка, вентиляторы, применяющиеся для охлаждения разнообразного оборудования более полувека, в последние годы претерпели существенные изменения. В этой статье мы рассмотрим причины и методы данного эволюционного движения.
Сегодняшний вектор развития электроники, особенно направленных на потребительский рынок устройств, задан на создание как можно более функциональных систем в минимально возможном форм-факторе. Это приводит к тому, что на одной и той же площади производители с каждым годом стараются умещать все больше транзисторов для увеличения функциональности и/или производительности чипов. Хорошим примером могут служить ноутбуки и карманные компьютеры, в которых процессорная и графическая мощь лишь возросли при уменьшении геометрических размеров и веса относительно первых представителей соответствующих классов. Естественно, освоение новых, все более тонких и совершенных технологических процессов производства помогает сдержать рост выделяемого при работе подобных полупроводниковых схем тепла, однако необходимость в его эффективном отводе полностью никуда не исчезает. Схожая ситуация возникает и с прочими устройствами, такими, например, как проекторы. Какие бы новые технологии ни внедрялись, без мощного источника света получить качественную картинку невозможно. А для стабильности работы, как и в случае с CPU/GPU и прочими микросхемами, тепло от ламп требуется отводить эффективно и, по возможности, бесшумно.
Действительно бесшумным методом отвода тепла можно считать лишь полностью пассивные системы, состоящие только из радиатора/теплотрубок. К сожалению, область применения таких СО ограничена: потолок по рассеиванию тепловой мощности этих изделий довольно низок, к тому же максимальная эффективность достигается лишь при большой площади рассеивания, а разместить достаточное количество ребер так, чтобы естественный приток воздуха их еще и равномерно омывал, бывает очень сложно, или даже невозможно. Хорошая альтернатива полностью бесшумным пассивным системам – активные кулеры, сочетающие в себе традиционные радиаторы с вентиляторами, создающими направленный воздушный поток. Однако присутствие движущихся частей означает наличие шума от работы. Кроме того, возрастает и общее энергопотребление, что может быть особенно важно при работе устройства от батареи с ограниченным зарядом. Наконец, с точки зрения надежности, добавление еще одного механического устройства несколько снижает общую отказоустойчивость.
Cookies на сайте bequiet.com.
bequiet.com использует файлы cookie (включая таковые третьих лиц) для сбора информации об использовании данного веб-сайта его посетителями. Эти файлы cookie помогают нам максимально улучшить работу нашего веб-сайта, постоянно совершенствовать его и предоставлять содержимое, предназначенное именно для вас. Нажав кнопку «Принять все cookie», вы соглашаетесь с использованием всех файлов cookie. Нажав кнопку «Принять только технические cookie», вы соглашаетесь с использованием только технических необходимых файлов cookie. Для получения дополнительной информации об использовании файлов cookie или для изменения настроек выберите «Информация об использовании файлов cookie».
Локализация сайта
Inside be quiet!
Говоря простым языком, происходит прерывистая подача напряжения на вентилятор, что в сочетании с инерцией массы моторчика и лопастей заставляет вентилятор вращаться быстрее или медленнее – в зависимости от того, насколько продолжительными и частыми являются фазы подачи напряжения. Если частота импульсов низкая, вентилятор будет вращаться медленно, а при росте частоты импульсов скорость вращения увеличивается. Некоторой сложностью этой технологии является необходимость сглаживаний постоянных флуктуаций напряжения. А это значит, что PWM вентиляторы имеют более сложную схему и более дороги, чем их классические аналоги. Внешне Вам будет сложно найти разницу – за исключением разъема подключения: у обычных вентиляторов разъем имеет 3 контакта, у моделей с PWM есть дополнительный четвертый контакт. Материнская плата, соответственно, должна поддерживать возможность управления скоростью вращения таких вентиляторов, что уже много лет является стандартом и может отсутствовать только на самых древних образцах материнских плат.
Вентиляторы с PWM используются повсеместно: для охлаждения процессоров, корпусов или радиаторов СВО. Управление их скоростью вращения может осуществляться с помощью специальных программных инструментов (так называемых утилит) в операционной системе или через BIOS / UEFI, а также с помощью внешних физических регуляторов скорости, если таковые имеются в корпусе Вашего ПК. Более того, Вам нет необходимости отвлекаться на изменение скорости вращениям вручную – современные материнские платы способны отлично справляться с охлаждением компонентов ПК, увеличивая скорость вращения вентиляторов когда это необходимо, или снижая ее для максимально тихой работы в режиме малой нагрузки системы.
PWM vs DC на кулере
17 Aug 2020 в 18:27

17 Aug 2020 в 18:27 #1
Собственно,в названии темы сам вопрос.Да,знаю,что DC-ты регулируешь напряжение,поступающее на крутилятор,а PWM-напрямую им управляешь,но что предпочтительнее,лучше и эффективней?Желательно поподробней,где лучше PWM,а где DC и при каких обстоятельствах.И еще вопрос:Если я поставлю в биосе например 50% оборотов кулера при температуре 50 градусов и 20% оборотов при 20 градусах(это через PWM регулировку естественно),то при температуре в 35 градусов кулер будет вращаться с оборотами 20% или же с усредненным значением тоже в 35%?Что будет,если сделать также,но в DC(Например,5 вольт напруга на кулер при 20 градусах и 8 вольт при 50 градусах,то при 35 градусах какое напряжение будет подаваться на кулер:по прежнему 5 вольт ибо температура не превысила отметку в 50 градусов или же усредненное значение в 6.5 вольт на вентилятор)?

17 Aug 2020 в 21:16 #2
DC-ты регулируешь напряжение,поступающее на крутилятор,а PWM-напрямую им управляешь
но что предпочтительнее,лучше и эффективней?Желательно поподробней,где лучше PWM,а где DC и при каких обстоятельствах.
А хз, честно. Имхо, PWM нужен для регулировки сразу нескольких вентиляторов через хаб, если тыкать каждый вентилятор в фан-разъём материнки, то смысла мало. Но это имхо, мб я не прав, и там есть какой-то особый смысл. Разницы в эффективности охлада нет, т.к. вентилятор в любом случае вращается на определённых оборотах. Плюсом у PWM вентиляторов есть чёткий диапазон скорости вращения (условно 1000-2000 оборотов) и ниже ты не прыгнешь. А вот путём изменения напряжения напрямую, можно снизить скороть вращения ниже 1000. Офк если вентилятор позволяет, т.к. не все вентиляторы работают на пониженном напряжении. Может случится, что двигатель не стартанёт вовсе или будет работать рывками.
И еще вопрос:Если я поставлю в биосе например 50% оборотов кулера при температуре 50 градусов и 20% оборотов при 20 градусах(это через PWM регулировку естественно),то при температуре в 35 градусов кулер будет вращаться с оборотами 20% или же с усредненным значением тоже в 35%?
А у тебя там полосочек графика нет что ли? Будет кривая линия между точками, т.е. на 35С будет 35%.
Что будет,если сделать также,но в DC
(Например,5 вольт напруга на кулер при 20 градусах и 8 вольт при 50 градусах,то при 35 градусах какое напряжение будет подаваться на кулер:по прежнему 5 вольт ибо температура не превысила отметку в 50 градусов или же усредненное значение в 6.5 вольт на вентилятор)?
900 оборотов, хотя PWM 1000-1800 вроде.
Что такое ШИМ-контроллер PWM и для чего он нужен

Любой радиолюбитель, начинающий телемастер или электрик рано или поздно столкнётся с такой штукой, как ШИМ-контроллер. За рубежом он маркируется как PWM. Поэтому сегодня я хочу остановиться на вопросе что такое ШИМ-контроллер, как он работает и для чего нужен. Даже если Вы не планируете заниматься ремонтом электронной техники, всё равно эта статья будет интересна для общего ознакомления.
Широтно-импульсный модулятор — принцип работы
Аббревиатура ШИМ расшифровывается, как широтно-импульсный модулятор. На английском это будет так — pulse-width modulation или PWM. В теле- и радио-технике ШИМ-контроллеры используются для преобразования напряжения, их можно встетить даже в качестве узлов системы управления скоростью электроприводов в бытовых приборах, меняя скорость электродвигателя. PWM-контроллер есть даже в обычных импульсных блоках питания.
Там постоянное напряжение на входе преобразуется в импульсы прямоугольной формы, которые формируются с определенной частотой и с определённой скважностью. На выходе, с помощью управляющих сигналов, получается регулировать работу целого транзисторного модуля большой мощности. Таким образом разработчики получили блок управления напряжением регулируемого типа, который значительно меньше и удобнее старых, которые используют понижающий трансформатор, диодный мост и фильтр помех.
Главные плюсы ШИМ:
В Интернете Вы можете встретить ШИМ-контроллер на Arduino или NE555. Это не совсем контроллер, а скорее уже генератор ШИМ-импульсов, в которых нет возможности подключения цепи обратной связи. Такие устройства подходят больше для регуляторов напряжения, чем для обеспечения стабильного питания приборов, ведь они могут использоваться только для регулирования выходных параметров, но не для их стабилизации.
Стандартная схема ШИМ-контроллера, который используется в теле-, радио- и иной электронной аппаратуре, характеризуется наличием нескольких выходов.
Общий вывод (GND) — контакт подключается к общему проводу схемы питания контролера. Он соединен с аналогичным контактом схемы подачи питания модуля и контроллирует напряжение на выходе схемы, отключая ее при снижении значения ниже пороговой величины.
Вывод питания (VC) — этот вывод ШИМ-контроллера отвечает за энергоснабжение схемы и подключение питания. Как правило, вывод контроля питания и вывод питания располагаются рядом друг с другом. Не перепутайте его с выводом VCC.
Вывод контроля питания (VCC) — следит, чтобы напряжение питания микросхемы было выше определенного значения. Обычно этот контакт соединяют с VC. Если напряжение на этом выводе падает ниже заданного порогового значения для данного PWM-контроллера, то контроллер выключается. Если этого не делать, то при снижении напряжение на выходе схемы, то транзисторы начнут открываться не полностью и будут быстро нагреваться, что приведёт к поломке.
Выход контроллера OUT – это выходное управляющее напряжение, другими словами отсюда подаётся управляющий ШИМ-сигнал для силовых ключей. Тут надо отметить, что микросхемы бывают разные. Например, есть с друмя выходами — двухтактные, которые применяются для управления двухплечевыми каскадами. Да и сам выходной каскад может быть одно- и двухтактным. Тут главное не запутаться!
Вывод VREF — Опорное напряжение. Обеспечивает работу функции формирования стабильно опорного напряжения. Как правило, екомендуется соединять его с общим проводом конденсатором 1 мкФ для повышения качества и стабильности опорного напряжения.
Вывод ILIM — Ограничитель выходного тока. Это сигнал с датчика тока. Если напряжение на этом выводе превышает заданный порог (как правило, это 1 Вольт), то ШИМ-контроллер закрывает силовые ключи. Если же превышается ещё больший порог (обычно 1.5 Вольта), то PWM-контроллер сбрасывает напряжение на ножке мягкого старта и импульсы на выходе прекращаются.
Вывод ILIMREF — задаёт значение ограничения выходного тока на выводе ILIM.
Вывод SS — так называемый «мягкий старт». Напряжение на этом контакте ограничивает максимально возможную ширину импульсов. Сюда ШИМ-контроллер подает ток фиксированной силы.
Вывод RtCt – используется для подключения времязадающей RC-цепи, используемой для определения частоты ШИМ-сигнала.
Вывод RAMP – это ввод сравнения. Рабоает это так. На контакт подаётся пилообразное напряжение. Как только оно превышает значение напряжение на выходе усиления ошибки, вывод OUT появляется отключающий сигнал. Это основа ШИМ-регулирования.
Вывод CLOCK – тактовые импульсы. Используются для синхронизации между собой сразу нескольких ШИМ-контроллеров. В этом случае RC-цепь подключается только к ведущему контроллеру, RT ведомых соединяется с Vref, а CT ведомых соединяюся с общим.
Вывод INV — это инвертирующий вход компаратора. На нём построен усилитель ошибки. Чем больше напряжение на INV, тем длиннее выходные импульсы.
Вывод NONINV – это неинвертирующий вход компаратора. Его обычно подключают к общему проводу — GND.
Вывод EAOUT — выход усилителя ошибки — Error Amplifier Output. С этого вывода осуществляется частотная коррекция усилителя ошибки, путём подачи сигналов на INV через частотозависимые цепи. Дело в том, что PWM-контроллер достаточно медленно реагирует на воздействие через вход усилителя ошибки и потому схема может сгореть из-за возбуждения. Поэтому и применяется вывод EAOUT.
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:



