История создания лунного ровера
В 1964 году в NASA начали задумываться об отправки астронавтов на Луну, а также о том, какой аппарат для изучения поверхности послать вместе с ними. Первые варианты были нелепые и странные, но в 1969 году ученые всерьез взялись за разработку лунохода для миссии «Аполлон». И менее, чем через два года, он был на Луне.
Первые роверы
Ученые NASA из Центра космических полётов имени Джорджа Маршалла (George Marshall Space Flight Center) были первыми, кто задумался об отправке астронавтов на Луну. Было очевидно, что потребуется специальный аппарат, которые будет помогать при исследовании спутника. Главным претендентом был проект транспорта весом в три тонны, с закрытой кабиной для двух человек и максимальной скоростью до 100 (!) километров в час, что позволяло изучить большую площадь. Назывался проект MOLAB.

Некоторые инженеры пошли дальше: предлагали в будущем дать возможность подобным аппаратам ходить, ползать, прыгать и даже летать вокруг Луны. Идея наличия в луноходе экипажа так и не была реализована до 1969 года. 7 апреля, чуть более, чем за три месяца до старта миссии «Аполлон-11», Вернер фон Браун (Wernher von Braun) создал в Центре космических полетов Маршалла команду по разработке лунного ровера — Lunar Roving Task Team.
В начале работы фон Браун признался, что наличие такого транспорта у астронавтов значительно усложнит запуск миссии — увеличится вес дополнительного оборудования, а значит увеличится стоимость и риски проекта. Но в то же время руководитель команды отмечал, что с помощью лунохода астронавтам будет легче исследовать поверхность Луны — ездить на ровере куда удобнее, чем передвигаться в громоздких скафандрах.
»
Проект невозможно было завершить в срок, к дате запуска «Аполлона-11», однако авторы верили, что в следующих миссиях «Аполлон» будет использоваться их луноход.
Разработка лунного ровера
В начале 1970 года NASA заключила договор с Боингом на создание лунохода. В ходе работы стало понятно, что ровер не будет являться полноценной мобильной лабораторией, имея только минимальный исследовательский функционал. Кроме того проект усложнялся тем, что на Луне отсутствует атмосфера, большие перепады температур, слабая сила притяжения и неизвестная поверхность. Поэтому ровер должен был быть мощным, тяжелым и надежным.

Устройство и характеристики лунного ровера
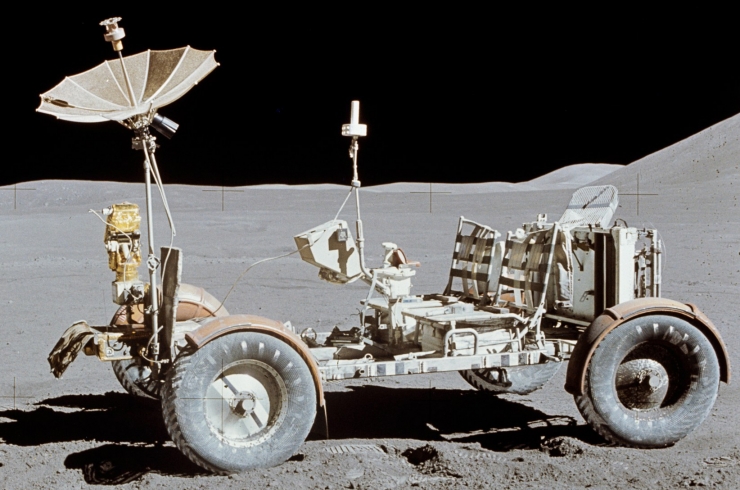
Вес аппарата составлял 210 кг, грузоподъемность в условиях лунного притяжения — 490 кг, длина — 3 м, колесная база — 2,3 м. Питался ровер от двух 36-вольтовых неперезаряжаемых серебряно-цинковых батарей, которые были снабжены системой пассивного охлаждения. У каждого колеса был свой двигатель, что избавляло аппарат от переключения скоростей. Колеса могли поворачиваться, поэтому радиус поворота был всего три метра. Кроме того ровер мог преодолевать препятствия в виде камней диаметром до 70 см. Покрышка была выполнена из плетеной стальной проволоки, что минимизировало возможность застрять в лунном грунте.
Чтобы экипаж не заблудился в незнакомой местности, у ровера была навигационная система, которая состояла из гирокомпаса и одометра, а также устройство для определения азимута движения по тени штыря-гномона. В целом система навигации позволяла астронавтам ориентироваться на поверхности Луны относительно какой-то точки отсчета, например места посадки. Кроме того, NASA с Земли могла отслеживать передвижения лунохода: для связи использовалась остронаправленная сетчатая параболическая антенна, а также ненаправленная антенна. На борту были установлены цветная телевизионная камера и 16-мм кинокамера, а также 70-мм фотокамера. Система тепловой защиты не позволяла высоким температурам воздействовать на оборудование.
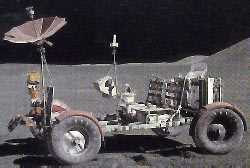
Первый лунный ровер в 1971 году, миссия «Аполлон-15»:
Человеческий фактор
Одним из главных вопросов оставался: смогут ли астронавты в громоздких скафандрах и в условиях лунной силы притяжения водить ровер? Для ответа на этот вопрос инженеры NASA проводили многочисленные тесты и эксперименты, симулируя на Земле условия лунной поверхности. В процессе доработок конструкции участвовали и астронавты, которые помогли улучшить ровер: например были добавлены ремни безопасности и спроектированы более удобные сиденья для экипажа.
На Луне
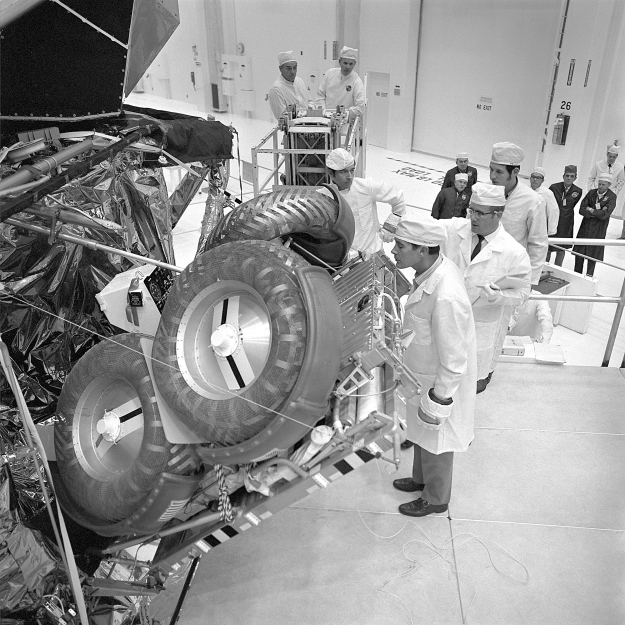
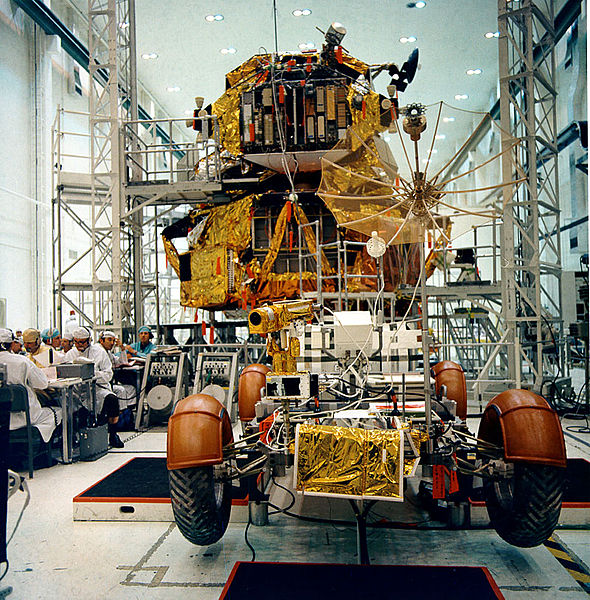
Для транспортировки ровер крепился к посадочной ступени лунного модуля. Процесс сборки:
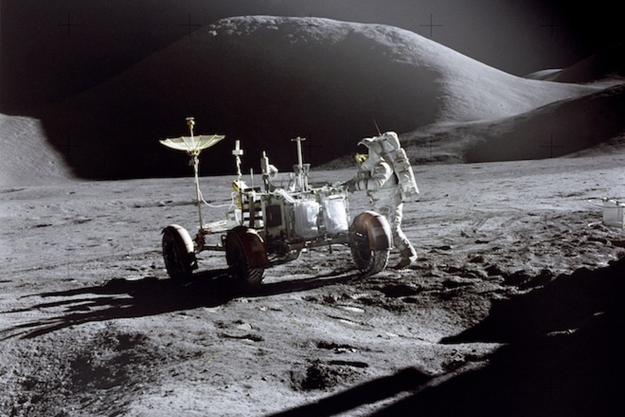
Впервые луноход оказался на Луне в ходе миссии «Аполлон-15». 31 июля 1971 года. Астронавты Дейв Скотт (Dave Scott) и Джим Ирвин (Jim Irwin) аккуратно опустили ровер на поверхность, попутно проверяя работоспособность всех узлов, затем автоматически развернулись колеса. После этого астронавтам оставалось лишь смонтировать сиденья экипажа. За процессом в прямом эфире наблюдал центр управления NASA.
Благодаря роверу астронавты могли намного больше отдаляться от лунного модуля: в ходе миссий Аполлон-17 аппарат был на расстоянии до 7,6 км от точки посадки, в отличие от «пеших» миссий, когда астронавты отходили лишь на полтора километра. Кроме того, с помощью ровера были собраны разнообразные образцы лунного грунта.
Интересные факты
Во время второй лунной экспедиции «Аполлон-17» Юджин Сернан (по другим данным, Хариссон Шмитт, геолог экспедиции) неся в кармане скафандра молоток, случайно зацепил его рукояткой крыло «луноровера», в результате чего оно почти отвалилось; эта небольшая (по земным меркам), проблема превратилась в весьма значительную для астронавтов.
Во время движения «луноровера» поднималось очень много пыли, а со сломанным крылом пыль попадала и на скафандры, и на элементы средства передвижения, а так как пыль практически черная, это создавало условия для перегрева (не зря скафандры выполнены в белых цветах). Инженеры НАСА всю ночь работали над решением проблемы, и утром сообщили астронавтам инструкции, в результате крыло было приклеено клейкой лентой.
UPD: kbtsiberkin добавил фото крыла, заклеенного с помощью скотча и комплекта карт (Источник):
Луномобиль
Хиви НАСА. Вопросы продолжают поступать:
— На фото, приведённом в австрийском журнале «Format», удивляет мощная конструкция луномобиля (рис. 124). В спускаемых на Луну аппаратах каждый грамм веса — дороже золота (обратите внимание на чертежи и фото реальных посадочных модулей, на колёса советских «луноходов» — тонкие лапки и обод на спицах). К чему лу-номобилю значительного размера крылья над огромными колёсами? К чему массивная конструкция: мощный швеллер на раме, толстые трубы? Будь эта махина для Луны, она выглядела бы совсем иначе и походила бы больше на четырехколесный велосипед с тонкими трубчатыми конструкциями. Но настоящую лунную конструкцию нельзя использовать на Земле: она разрушится под действием земного веса, и режиссёрам «высадок» пришлось довольствоваться земными конструкциями.

Ю. И. МУХИН. Это ещё анекдот. Пальцы перчаток астронавтов были настолько грубые, что они не могли работать с фотоаппаратом и его жёстко крепили на груди астронавтов. Как же они такими пальцами отлепили клейкую ленту от рулона? И на хрена они брали с собой карту? Лучше бы запасное крыло. Или в Голливуде его не нашлось?
Хиви НАСА. А весила эта штука всего 209 кило на Земле, около 35 кило, соответственно, на Луне. На фотографии из журнала «Format» LRV (lunar roving vehicle) показан в нагруженном состоянии, а «голый» он выглядит так (рис. 126).
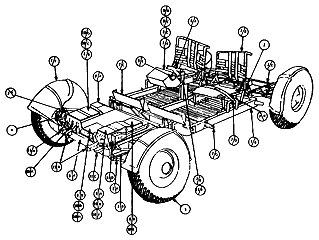
Не сказал бы, что это особо тяжёлая конструкция.
Кроме того, «не следует смешивать статику с динамикой, господин профессор, — это приводит к серьёзным ошибкам». Масса астронавта в полном лунном снаряжении — примерно полторы сотни килограмм, двух астронавтов — три центнера. Следовательно, на Луне пара астронавтов весит в сумме 50 кг. Если два астронавта усядутся на свой неподвижно стоящий на Луне луномобиль, то статическая нагрузка на его конструкцию будет вшестеро меньше, чем если бы они проделали это на Земле. Но, как только они покатят по лунным булыжникам и кратерам со скоростью свыше 10 км/ч (на сегодня рекорд скорости для Луны равен 17 км/ч и был показан астронавтами «Аполлона-16» на небольшом склоне), картина изменится. Когда колесо попадёт на очередной ухаб, то вверх подскочит (выражаясь по-научному, «испытает направленное вверх ускорение») масса в полтонны (триста килограммов массы астронавтов и двести — самого луномобиля). А сила, с которой масса сопротивляется ускорению, не зависит от веса — она одинакова и на Земле, и на Луне, и в космосе, где предметы не весят вообще ничего. Поэтому динамические нагрузки на конструкцию луномобиля (т. е. нагрузки от ударов и толчков при его движении) будут примерно такими же, как и на Земле.
А советскому Луноходу запас прочности с учётом динамических нагрузок был ни к чему. Хоть его масса и составляла свыше 700 кг (т. е. несколько больше, чем у американского луномобиля с двумя астронавтами), но его максимальная скорость — чуть больше одного километра в час. А фактически он двигался в несколько раз медленнее: ведь управляли-то им по радио, глядя на картинку на телеэкране. Картинка эта запаздывала на секунду с лишним, и сигнал управления с Земли шёл обратно к луноходу за такое же время. Поэтому оператор вёл Луноход очень осторожно, не спеша.
— Стоп-стоп! Поглядите-ка снова на фотографию луномобиля — ту, где у него к крылу приклеена карта! А где колеи от колёс? Следов от ног астронавтов сколько угодно, а от колеса — нет! Ни спереди, ни сзади! Как луномобиль оказался на этом месте, не оставив следов своего прибытия? Не иначе, по воздуху прилетел. А скорее всего, это просто макет — его принесли на руках и поставили на место, как декорацию. А о следах забыли. Есть и другие фотографии, на которых следов от колёс нет.
— Астронавты не просто катались на луномобиле. Доехав до места очередной остановки, они сходили с него, собирали образцы грунта, делали фотографии — тоесть вовсю топали вокруг луномобиля. При этом поднятая их ногами пыль засыпала следы от колёс. Не забудьте, что на Луне пыль летит в несколько раз дальше, чем на Земле.
Эта фотография сделана, когда астронавты сделали на этой стоянке всё, что намечали, и собирались в дальнейший путь — один из них уже уселся на сиденье. Судя по отпечаткам ног в пыли, вокруг этого колеса они потоптались немало. Так что следов от колёс в данном случае нет как раз потому, что есть много следов от ног.
Кстати, ваше предположение о том, что луномобиль могли просто принести на руках, отчасти справедливо. На Луне он весит менее 40 килограммов, поэтому один человек вполне может приподнять его за один край и развернуть на двух колёсах. Порой астронавтам было проще и быстрее именно таким способом развернуть его в нужном им направлении, чем поворачивать: радиус поворота у четырехколесной тележки довольно значительный. В некоторых случаях отсутствие следов от колёс может быть вызвано именно этим.
Ю. И. МУХИН. Такое впечатление, что насовцы до сих пор никак не могут придумать основные параметры используемой техники. Хиви считают, что луномобиль с двумя астронавтами весил 500 кГс, а в сборнике «Космическая техника» написано: «Вес при полной нагрузке 725 кГс». При этом хиви НАСА как-то необычно рекламируют этот автомобиль — делают упор на скорость и молчат о его мощности. А ведь реально скорость — это производная от мощности двигателя, и она будет разной на разных дорогах (асфальтовых, грунтовых, с подъёмом и т. д.). Поэтому давайте немного поговорим о мощности этого луномобиля поскольку, судя по «съёмкам с Луны», он очень резвый — легко трогается с места, быстро набирает скорость.
Советская энциклопедии «Космонавтика» даёт о нём такие сведения: «Американские космонавты в 1971…72 при трех последних лунных экспедициях на космических кораблях „Аполлон-15“, „Аполлон-16“ и „Аполлон-17“ использовали для передвижения по поверхности Луны в районе посадки лунный самоходный аппарат „Ровер“, доставляемый на Луну в одном из отсеков лунной кабины. Двухместный лунный самоходный аппарат — четырехколесный, рассчитан на управление космонавтами. Проектная максимальная скорость 13…км/ч, фактически была достигнута скорость 18…км/ч (при спуске со склона). Ресурс хода 65 км (фактический пробег составил: при полёте корабля „Аполлон-15“ — 27,2 км, „Аполлон-16“ — 27,1 км, „Аполлон-17“ — 35,7 км). Радиус разворота 6 м, тормозной путь
3 м. Лунный самоходный аппарат рассчитан на преодоление склонов крутизной до 20°, препятствий высотой до 0,3 м и трещин шириной до 0,7 м. Максимальный, допустимый крен и дифферент 45°. Тормоза должны удерживать лунный самоходный аппарат на склоне крутизной до 35°.
Масса нагружённого лунного самоходного аппарата 725 кг (в т. ч. собственно „Ровер“ — 211, космонавты с ранцевыми системами жизнеобеспечения — 364, научные приборы — 54, съёмочное и связное оборудование — 69, образцы лунных пород и пр. — остальное). Длина лунного самоходного аппарата 3,1 м, ширина 2,1 м, вые. 1,1 м, ширина колеи 1,83 м, ширина каждого из четырех колёс 0,23 м, диаметр колеса 0,81 м. Рама лунного самоходного аппарата и кресла космонавтов трубчатой конструкции из алюминиевого сплава, сиденья и спинки из нейлона. Полосы клейкого материала на спинке позволяют фиксировать ранцевую систему жизнеобеспечения; предусмотрены также привязные ремни из ребристого нейлона и пылезащитные крылья. Подвеска колёс торсионная. Все колёса ведущие. Ободья сплетены из проволоки диаметром 0,84 мм с цинковым покрытием. К ободу приклёпаны полосы из титанового сплава для защиты от истирания и улучшения сцепления с грунтом. В ступицу вмонтирован электродвигатель мощностью 183,9 Вт, связанный с одноступенчатым редуктором (передаточное число 80:1). Дополнительно имеются передний и задний электродвигатели (по 73,5 Вт, передаточное число редуктора 257:1), соединённые с колёсами специальными тягами и обеспечивающие разворот. Для электропитания лунного самоходного аппарата служат две не-подзаряжаемые серебряно-цинковые батареи, ресурс каждой 121 А·ч, мощность 150 Вт, номинальное напряжение 36 В, рабочая температура 4-52 °С. В целях теплозащиты верхняя поверхность батарей, бортовой ЦВМ и пульта управления лунного самоходного аппарата облицованы зеркальными пластинами из спечённой двуокиси кремния. На пульте размещены: спидометр (градуированный от 0 до 20 км/ч); индикатор дифферента и крена (градуированный от + 25° до —25°); индикатор курса с азимутальным лимбом и цифровыми указателями азимута, пройденного пути и удаления от лунной кабины по прямой; панель аварийной системы сигнализации о выходе из строя батарей, электродвигателей и др. Для управления „Ровером“ служит штурвальная колонка самолётного типа, расположенная между креслами, чтобы ею мог управлять любой космонавт. Отклонением колонки вперёд — назад регулируется скорость хода, поворотом относительно оси — поворот лунного самоходного аппарата. Кнопка в основании колонки служит для переключения с переднего на задний ход. Торможение лунного самоходного аппарата производится изменением направления тока в электродвигателях. В качестве запасных средств используются тормозные колодки и барабанный тормоз. Извлечение лунного самоходного аппарата, установка его на грунт и приведение в рабочее положение обеспечиваются одним космонавтом.
На „Ровере“ размещена остронаправленная антенна с параболическим отражателем диаметром 96,5 см для передачи ТВ изображения непосредственно на Землю, а также малонаправленная антенна для голосовой связи с Землёй и передачи телеметрической информации. Остронаправленная антенна используется только во время стоянки лунного самоходного аппарата и требует предварительного наведения на Землю с помощью телескопического прицела (визира). Передача ТВ во время движения не ведётся. В передней части лунного самоходного аппарата смонтирована ТВ камера, кино-и фотокамеры. Управление ТВ камерой (включение и выключение, наведение по азимуту и углу места, панорамирование, изменение фокусного расстояния) может осуществляться космонавтами и по командам с Земли. ТВ камера „Ровера“ использовалась для съёмки старта взлётной ступени лунной кабины с Луны, а после отлёта космонавтов — для астрономических наблюдений и регистрации взрывов сейсмических зарядов, оставленных космонавтами на Луне».
Первое, что сразу бросается в глаза, — это мизерная мощность луномобиля. Все четыре двигателя на его колёсах в сумме дают как раз одну лошадиную силу. Но это исполнительные двигатели, они бы такую мощность может быть и взяли, да кто же им даст? Ведь суммарная мощность двух батарей 300 Вт, т. е. всего 0,4 лошадиной силы. Масса этой «шайтан-арбы» как у «Запорожца» и всего на центнер меньше, чем у «Жигулей», а мощность 0,4 л.с. Не многовато ли? Я поискал в доме бытовой прибор с мощностью, как у американского луномобиля. Дрель — 750 Вт, кстати, на рынке самая маломощная дрель — 420 Вт. Принтер — 700 Вт, мясорубка — 420 Вт, наконец, нашёл в углу одного из кухонных шкафов старую кофемолку, которой редко пользовались, — 115 Вт. Вы можете себе представить «Запорожец», который ехал бы по сухому песку с двигателем не в 30 кВт, а 0,3 кВт? У меня был «Запорожец», и я себе такого представить не могу. Хиви мне скажут, что я ничего не понимаю в луномобилях, что на Луне «Ровер» быстро ездил по песку, оставляя глубокие колеи, лихо взбирался на горки и т. д. Я это тоже видел. Но это же кино! А я говорю «за жизнь».
Возьмите секундомер и рулетку и взбегите на один пролёт лестничного марша как можно быстрее. Замерьте время, которое вам понадобилось, и высоту пролёта. Затем свой вес (в кг) умножьте на высоту пролёта (в метрах) и разделите на время (в секундах), и на 75. Уверен, что результат (ваша мощность в лошадиных силах) у вас будет больше единицы. И в этом нет ничего странного: любой человек без проблем может развить мощность в одну лошадиную силу, тренированные люди развивают мощность в несколько лошадиных сил, а спортсмен — и до десятка. Спросите себя: на хрена было тащить на Луну телегу массой в 210 кг, т. е. в полтора раза больше, чем масса обоих астронавтов, если каждый из них может длительно развивать мощность (скажем, при ходьбе) большую, чем мощность этой телеги?
Велосипедист-любитель без проблем развивает скорость 30 км/час, при скорости луномобиля (10 км/час) велосипедист тратит энергии столько же, сколько и при обычной ходьбе, при скорости 5 км/час — в 4 раза меньше. То есть если бы дело действительно шло о Луне, то американские инженеры соединили бы вместе два велосипеда и заставили бы астронавтов крутить педали, при этом тележка была бы в 10 раз легче «Ровера», а мощность её в 10 раз больше.
Но теперь понятно, такое сооружение не впечатлило Стенли Кубрика, ему требовалось показать автомобильную мощь США. Но, чтобы придать этой телеге мощность хотя бы в 4 лошадиные силы, на неё нужно было грузить 300 кг батарей. Вот американские жулики и выкрутились: батарей загрузили 30 кг, а эфир заполнили болтовнёй о бешеной скорости этого агрегата.
И ещё по поводу пояснений хиви, что луномобиль при скорости свыше 10 км/час наскакивает на булыжники, и если у него колёса будут как у велосипеда, то они не выдержат динамических нагрузок. Должен сказать, что у велосипедистов, в отличие от хиви НАСА, есть головы, и они им нужны и для того, чтобы не наскакивать на скорости на булыжники.
И с т о р и я к о с м о н а в т и к и
Галерея







Луноход «Ровер»
Луноход «Ровер»
Американские космонавты в 1971-1972 гг. при трех последних лунных экспедициях на космических кораблях «Аполлон-15», «Аполлон-16» и «Аполлон-17» использовали для передвижения по поверхности Луны в районе посадки луноход «Ровер», доставляемый на Луну в одном из отсеков лунной кабины. Двухместный луноход — четырехколесный, рассчитан на управление космонавтами. Проектная максимальная скорость 13 км/ч, фактически была достигнута скорость 18 км/ч (при спуске со склона). Ресурс хода 65 км (фактический пробег составил: при полете корабля «Аполлон-15» — 27,2 км, «Аполлон-16» — 27,1 км, «Аполлон-17» — 35,7 км). Радиус разворота 6 м, тормозной путь
3 м. Луноход рассчитан на преодоление склонов крутизной до 20°, препятствий высотой до 0,3 м и трещин шириной до 0,7 м, Максимальный допустимый крен и дифферент 45°. Тормоза должны удерживать луноход на склоне крутизной до 35°.
 На «Ровере» размещена остронаправленная антенна с параболическим отражателем диаметром 96,5 см для передачи ТВ изображения непосредственно на Землю, а также малонаправленная антенна для голосовой связи с Землей и передачи телеметрической информации. Остронаправленная антенна используется только во время стоянки лунохода, и требует предварительного наведения на Землю с помощью телескопического прицела (визира). Передача ТВ во время движения не ведется. В передней части лунохода смонтирована ТВ камера, кино- и фотокамеры. Управление ТВ камерой (включение и выключение, наведение по азимуту и углу места, панорамирование, изменение фокусного расстояния) может осуществляться космонавтами и по командам с Земли. ТВ камера «Ровера» использовалась для съемки старта взлетной ступени лунной кабины с Луны, а после отлета космонавтов — для астрономических наблюдений и регистрации взрывов сейсмических зарядов, оставленных космонавтами па Луне.
На «Ровере» размещена остронаправленная антенна с параболическим отражателем диаметром 96,5 см для передачи ТВ изображения непосредственно на Землю, а также малонаправленная антенна для голосовой связи с Землей и передачи телеметрической информации. Остронаправленная антенна используется только во время стоянки лунохода, и требует предварительного наведения на Землю с помощью телескопического прицела (визира). Передача ТВ во время движения не ведется. В передней части лунохода смонтирована ТВ камера, кино- и фотокамеры. Управление ТВ камерой (включение и выключение, наведение по азимуту и углу места, панорамирование, изменение фокусного расстояния) может осуществляться космонавтами и по командам с Земли. ТВ камера «Ровера» использовалась для съемки старта взлетной ступени лунной кабины с Луны, а после отлета космонавтов — для астрономических наблюдений и регистрации взрывов сейсмических зарядов, оставленных космонавтами па Луне.
«Ровер» показал общую высокую эксплуатационную надежность (мелкие неполадки, например выход из строя рулевого управления передних колес пли поломка пылезащитного крыла, сравнительно легко устранялись космонавтами, использовавшими рекомендации специалистов, находившихся на Земле). Луноход расширил возможности обследования района посадки и значительно облегчил работу космонавтов на Луне.
NASA отправит на Марс аппарат Perseverance для производства кислорода
Вот уже несколько лет мир наблюдает за историей создания марсохода с необычным названием “Настойчивость” (англ. Perseverance). Дело в том, что аппарат должен дополнить данные, полученные ранее с помощью других марсоходов, но для этого Настойчивости предстоит преодолеть трудности, вызванные ограничениями научного оборудования, установленного на роверах Spirit, Opportunity и Curiosity. Однако эта миссия NASA отличается от предыдущих не только названием – наибольший интерес сегодня представляет надежно спрятанная внутри корпуса золотая коробка – “Мокси” – с помощью которой Настойчивость попытается преобразовать небольшое количество атмосферного углекислого газа Марса в чистый, пригодный для дыхания кислород. Согласитесь, это будет по-настоящему уникальная миссия. Настойчивость отправится на Красную планету 17 июля текущего года.
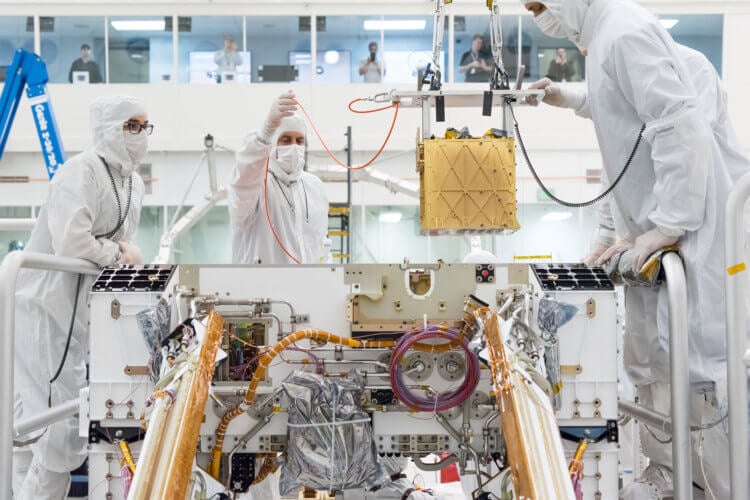
Установка “Мокси” на аппарат NASA “Настойчивость”
Ровер — космический аппарат, который способен передвигаться по поверхности других планет. На данный момент на Марсе находится ровер «Curiosity», который был посажен на поверхность планеты 6 августа 2012 года.
Есть ли жизнь на Марсе?
Дать имя новому марсоходу специалисты NASA попросили школьников всей страны. В результате, оценив 28 000 вариантов, инженеры выбрали название Настойчивость, которое предложил семиклассник по имени Александр Мэтер из Вирджинии. Запуск состоится летом текущего года. В общей сложности полет займет 8 месяцев – Настойчивость приземлится на Марс в феврале 2021 года. Как сообщается на официальном сайте американского национального агентства, как и все предыдущие исследовательские миссии, Настойчивость столкнется с трудностями и совершит множество удивительных открытий. Напомним, что недавно с помощью еще одного аппарата NASA Insight, ученые смогли доказать сейсмическую активность Красной планеты.
Чтобы всегда оставаться в курсе новостей из мира популярной науки и высоких технологий, подписывайтесь на наш новостной канал в Telegram
Запуск Настойчивости состоится на ракете Atlas V, о которой в своем материале рассказывал мой коллега Николай Хижняк. Марсоход будет оснащен новыми исследовательскими инструментами, включая бортовую лабораторию для отбора проб марсианских пород, 23 оптических датчика и камеру самого высокого разрешения. Более того, новый ровер усовершенствован автономным вертолетом на солнечной энергии, задача которого – поиск новых мест для исследований. Отметим, что ни один аппарат не взлетал в атмосфере другой планеты. С помощью встроенного мини-вертолета NASA хочет узнать, как будет вести себя летательный аппарат на Марсе и сможет ли летать вообще, так как атмосфера Красной планеты в 100 раз менее плотная, чем на Земле. Когда Настойчивость достигнет поверхности Марса, то должен приземлиться в марсианском кратере Езеро, в котором, по мнению специалистов NASA, возможно, в какой-то момент истории планеты, существовала жизнь. Сбор образцов, проведенный в этих краях, должен открыть сокровищницу информации, которая может помочь исследователям в их непрекращающихся поисках лучшего понимания того, был ли Марс когда-то обитаемой планетой или нет.
Запуск Настойчивости состоится на ракете Atlas V, о которой в своем материале рассказывал мой коллега Николай Хижняк.
Как Perseverance будет получать кислород?

Так выглядит сборка Настойчивости специалистами NASA
Несмотря на то, что все вышеперечисленные задачи Настойчивости несколько поражают воображение – даже знаменитый писатель-фантаст Рэй Брэдбери не предсказал нечто подобное в своих “Марсианских хрониках” – золотая коробка Мокси, созданная для преобразования атмосферного углекислого газа Красной планеты в пригодный для дыхания кислород, превзошла всех. Мокси устроено довольно сложно – устройству предстоит отделять атомы кислорода из существующих молекул углекислого газа, в результате чего образуется монооксид углерода, кислород и другие побочные продукты.
Еще больше увлекательных статей о том, как ученые всего мира изучают Красную планету, читайте на нашем канале в Google News
Атмосфера Марса состоит примерно на 95% из углекислого газа, поэтому его количества достаточно для того, чтобы превратить его в кислород. К сожалению, Мокси вырабатывает лишь небольшое количество кислорода – около шести граммов в час – а это ровно столько, чтобы сохранить жизнь маленькой собаке. Кроме того, Мокси не будет работать все время, так как Настойчивости требуется энергия для других не менее важных научных операций. В случае успеха, ученые смогут раз и навсегда доказать, что на Марсе можно производить достаточно кислорода для поддержания человеческой жизни. Думаем, эти данные будет невозможно недооценить – в конце-концов мы собираемся отправить людей на Красную планету и будет просто невероятно, если там можно будет дышать длительное время. Также, будет крайне интересно посмотреть, как работает Мокси и как его процессы повлияют на исследование Марса в будущем.



