Что такое система кгс на самолете
Курсо-глиссадная система ( сокр. КГС, в английской терминологии — Instrument Landing System, ILS) — радионавигационная система обеспечения захода на посадку по приборам.
Бортовое оборудование ЛА (например Курс-МП, VIM-95 и др.), представляет собой комплекс из двух радиоприёмных устройств с направленными антеннами (курсовая и глиссадная). Для упрощённого рассмотрения принципа работы бортовой части КГС рассмотрим работу курсового канала. В случае, если самолет находится точно на пересечении двух лепестков диаграммы, глубина модуляции обоих сигналов одинакова, а их разность, соответственно равна нулю. Если ЛА отклонился влево или вправо, то один сигнал начинает преобладать над другим. И чем дальше от линии курса, тем больше мощность выходного сигнала. Полярность сигнала показывает в какую сторону отклонение. Глиссадный маяк работает точно по такому же принципу, только в вертикальной плоскости. Выходной сигнал выдаётся на планки командно-пилотажного прибора КППМ, по которому экипаж визуально фиксирует точность захода на посадку.
Рабочий диапазон частот КГС:
Дальность действия в соответствии с нормами ICAO:
Согласно документам ICAO КГС делятся на категории.
Стандартная КГС, которая классифицируется как КГС I категории, позволяет выполнять заходы на посадку при облачности не ниже 60 м над полосой и видимости 700 м (2400 фт), либо при видимости 550 м (1800 фт) если есть освещение осевой линии и зоны посадки.
Более сложные системы II и III категории позволяют выполнять посадку при почти нулевой видимости, но требуют cпециальной дополнительной сертификации самолёта и пилота.
Заходы по II категории позволяют выполнять посадку при высоте принятия решения 30м (100фт) и видимости 400м (1200фт).
При посадке по III категории самолёт приземляется с использованием системы автоматической посадки, высота принятия решения отсутствует, а видимость должна быть не ниже 250 м (700фт) по категории IIIa, либо от 50-250 м по категории IIIb. Каждая КГС, сертифицированная по III категории, имеет свои собственные установленные высоты принятия решения и минимумы. Некоторые КГС имеют сертификацию для посадок в условиях нулевой видимости (категория IIIc).
Системы II и III категорий должны иметь освещение осевой линии, зоны посадки и другие вспомогательные средства.
КГС должна выключаться в случае сбоев. С увеличением категории оборудование должно выключаться быстрее. Например, курсовой маяк I категории должен выключиться через 10 секунд после обнаружения сбоя, а маяк III категории должен выключиться менее чем через 2 секунды.

Курсовой радиомаяк КРМ-90 системы посадки СП-90
Заход по КГС.
Заход по курсо-глиссадной системе выгодно отличается от захода по приводам тем, что пилот имеет возможность наблюдать положение самолета относительно позиционной линии по планкам положения на приборе. По темпу приближения планки курса к индексу ВПП можно своевременно определить изменение угла сноса и внести поправку в курс выхода на ВПП. При этом не следует пренебрегать контролем положения самолета относительно позиционной линии по показаниям АРК: при нахождении вблизи позиционной линии стрелки АРК параллельны или их усредненные показания примерно одинаковы. Надо помнить, что на работу КГС могут оказывать влияние многие посторонние факторы, а АРК, в общем, менее подвержены помехам. Комплексный контроль курса более надежен, и опытный экипаж всегда контролирует работу КГС по радиокомпасам.
При пилотировании по планке курса углы выхода незначительны: 2-3 градуса. Все внимание пилота сосредоточено на выдерживании угла упреждения и контроле и коррекции по курсовой планке. Второй пилот контролирует положение самолета по АРК.
Выдерживание глиссады осуществляется по вариометру. «Уточненная методика» здесь неприемлема, т. к. самолет движется точно по глиссаде, и отклонения от глиссады контролируются по глиссадной планке и сверяются с показаниями вариометра.
Поэтому с момента входа в глиссаду устанавливается расчетная вертикальная скорость, и пилот сверяет показания вариометра с положением самолета относительно глиссады по глиссадной планке. При этом ведется анализ поведения самолета и причин, почему при расчетной вертикальной скорости самолет не идет по глиссаде, а как бы «просит» идти выше или ниже.
Если самолет «просит» увеличить вертикальную скорость, возможен попутный ветер или уменьшение встречного. Если самолет начинает снижаться ниже глиссады и «просит» уменьшить темп снижения, возможно усиление встречного ветра.
Таким образом, по прибору КГС можно анализировать поведение машины более точно, чем по ОСП.
Использование АРК для контроля по направлению позволяет определить высоту пролета дальнего привода и еще раз проконтролировать выдерживание глиссады. Пролет ДПРМ является важнейшим контрольным этапом, и экипаж обязан готовиться к корректирующим действиям в случае, если высота пролета ДПРМ достигнута, а стрелка показывает, что пролета еще не наступило. Если же к моменту достижения высоты пролета ДПРМ звенит маркер и стрелка повернулась на 180о, значит, снижение идет строго по глиссаде, и контрольная система ОСП подтверждает правильную работу КГС.
При подходе к ВПР, а значит, и к БПРМ, показания АРК становятся устойчивыми, и стрелка АРК еще раз подтвердит, что самолет устойчиво идет по курсу. Если же показания стрелки АРК при подходе к БПРМ начинают отличаться от показаний положения самолета по курсовой планке – это повод для сомнения в работе именно КГС, а значит, к ВПР экипаж должен быть насторожен и готов к непосадочному положению и уходу на второй круг.
На ВПР у экипажа должна быть твердая уверенность, что системы КГС и ОСП точно вывели самолет на позиционную линию. И если в этот момент КВС случайно окажется в плену зрительной иллюзии, что ВПП где-то «чуть сбоку», экипаж не должен позволить ему увести самолет с подобранного курса, а особенно – увеличить вертикальную скорость. Надо твердо усвоить: если курс и вертикальная скорость подобраны, самолет не может быть нигде, кроме как на курсе-глиссаде. А значит, ВПП должна быть только строго впереди, и действия КВС по резкому изменению параметров полета на ВПР есть смертельно опасная ошибка, исправить которую можно лишь немедленным и энергичным уходом на второй круг. Практика многочисленных катастроф показала, что для спасения у экипажа остается всего несколько секунд.
Читайте также
Заход по КГС.
Заход по КГС. Заход по курсо-глиссадной системе выгодно отличается от захода по приводам тем, что пилот имеет возможность наблюдать положение самолета относительно позиционной линии по планкам положения на приборе. По темпу приближения планки курса к индексу ВПП можно
Заход в директорном режиме.
Заход в директорном режиме. Заход в директорном режиме отличается от захода по КГС тем, что директорная система выдает на стрелки прибора команды, по которым пилот создает рассчитанный автоматикой оптимальный крен для выхода на траекторию полета и рассчитанную
Заход в автоматическом режиме.
Заход в автоматическом режиме. Автоматический заход на посадку отличается от директорного тем, что функцию удерживания командных стрелок в центре прибора выполняет автопилот. При этом имеется возможность использования автомата тяги для выдерживания приборной
Заход на посадку.
Заход на посадку. Надо выработать твердое правило: вписывание в схему производится на скорости полета по кругу. Это облегчает расчет штурману и позволяет в любой момент выпустить шасси.Второе правило: капитан должен уметь контролировать основные точки схемы захода по
Заход по КГС.
Заход по КГС. Заход по курсо-глиссадной системе выгодно отличается от захода по приводам тем, что пилот имеет возможность наблюдать положение самолета относительно позиционной линии по планкам положения на приборе. По темпу приближения планки курса к индексу ВПП можно
Что такое система кгс на самолете
Ку́рсо—глисса́дная система (КГС, в английской терминологии — Instrument Landing System, ILS) — наиболее распространённая в авиации радионавигационная система захода на посадку по приборам.
Принцип работы
КГС состоит из двух радиомаяков: курсового (КРМ) и глиссадного (ГРМ).
Антенная система КРМ представляет собой многоэлементную антенную решётку, состоящую из линейного ряда направленных антенн метрового диапазона с горизонтальной поляризацией. Для расширения рабочего сектора радиомаяка до углов ±35° часто используется дополнительная антенная решётка. Диапазон рабочих частот КРМ 108—112 МГц (используется 40-канальная сетка частот, где каждой частоте КРМ поставлена в соответствие определённая частота ГРМ). КРМ размещают за пределами взлётно-посадочной полосы на продолжении её осевой линии. Его антенная система формирует в пространстве одновременно две горизонтальных диаграммы излучения. Первая диаграмма имеет один широкий лепесток, направленный вдоль осевой линии, в котором несущая частота промодулирована по амплитуде сигналом суммы частот 90 и 150 Гц. Вторая диаграмма имеет два узких противофазных лепестка по левую и правую сторону от осевой линии, в которых радиочастота промодулирована по амплитуде сигналом разности частот 90 и 150 Гц, а несущая подавлена. В результате сложения сигнал распределяется в пространстве таким образом, что при полёте вдоль осевой линии глубина модуляции сигналов 90 и 150 Гц одинакова, а значит разность глубин модуляции (РГМ) равна нулю. При отклонении от осевой линии глубина модуляции сигнала одной частоты растёт, а другой — падает, следовательно, РГМ увеличивается в положительную или отрицательную сторону. При этом сумма глубин модуляции (СГМ) в зоне действия маяка поддерживается на постоянном уровне. Бортовое пилотажно-навигационное оборудование измеряет величину РГМ, определяя сторону и угол отклонения воздушного судна от посадочного курса.
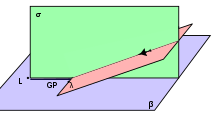
Антенная система ГРМ представляет собой в простейшем случае решётку из двух разнесенных по высоте направленных антенн дециметрового диапазона с горизонтальной поляризацией (решетка «0»). Диапазон рабочих частот ГРМ 329—335 МГц. ГРМ размещают со стороны, противоположной участку застройки и рулёжным дорожкам, на расстоянии 120—180 м от оси ВПП напротив зоны приземления. Удаление ГРМ от порога ВПП определяется таким образом, чтобы при заданном угле наклона глиссады опорная точка (точка над торцом ВПП, через которую проходит прямолинейная часть глиссады) находилась на высоте 15±3 м для радиомаячных систем посадки I и II категории и 15+3−1 м для систем III категории. Диаграмма направленности антенной системы ГРМ формируется в результате отражения радиоволн от поверхности земли, поэтому к чистоте зоны, непосредственно прилегающей к антенной системе ГРМ, предъявляются особые требования. Чтобы уменьшить влияние неровностей подстилающей поверхности на диаграмму направленности, а, следовательно, и искривления линии глиссады, используется антенная решётка из трёх вертикально разнесенных антенн (решетка «M»). Она обеспечивает пониженную мощность излучения под малыми углами к горизонту. ГРМ использует тот же принцип работы, что и КРМ. Его антенная система формирует в пространстве одновременно две вертикальных диаграммы излучения, с одним широким лепестком и с двумя узкими — выше и ниже плоскости глиссады (плоскости нулевого значения РГМ). Пересечение плоскости курса и плоскости глиссады даёт линию глиссады. Линию глиссады можно назвать прямой только условно, т.к. в идеальном случае она представляет собой гиперболу, которая в дальней зоне приближается к прямой, проходящей через точку приземления. Кроме того, из-за неровностей рельефа местности и препятствий в зоне действия радиомаяков реальная линия глиссады подвержена искривлениям, величина которых нормируется для каждой категории системы посадки.
Угол наклона глиссады (УНГ) примерно равен 3°, но может зависеть от местности. Чем меньше УНГ, тем удобнее садиться самолёту, так как ниже вертикальная скорость. В России в аэропортах, где местность не мешает низкому заходу, используется УНГ 2°40′. В горах или если глиссада проходит над городом, УНГ больше. Например, в аэропорту Новосибирск Северный, который находится близко к центру города, глиссада, проходящая над лесом, наклонена под углом 2°40′ (уклон 4,8 %), а заход со стороны города производится под углом 3°40′ (наклон 6,6 %, в 1,5 раза больше). В аэропорту города Кызыла, в горной местности, УНГ равен 4° (7 %).
Курсо-глиссадные системы
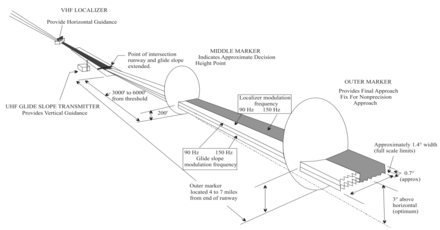
Наземное оборудование системы ИЛС (ILS) состоит из курсового и глиссадного радиомаяка и трех маркерных радиомаяков (в настоящее время ближний маркер устанавливается не во всех аэропортах). В некоторых аэропортах для построения маневра захода на посадку на дальнем маркерном пункте устанавливается приводная радиостанция.
При выполнении международных полетов можно встретить два варианта размещения наземного оборудования.
Курсовые маяки системы ИЛС работают в круговом варианте. В последнее время устанавливаются маяки секторного варианта: угловая ширина сектора по 70° в обе стороны от линии посадки. Основные характеристики зон курса и глиссады ИЛС приведены в разделе наземного оборудования СП-50, поскольку они совпадают с соответствующими характеристиками СП-50 при новой регулировке.
Маркерные маяки системы ИЛС работают на той же частоте (75 Мгц), что и в системе СП-50 и излучают следующие кодовые сигналы: ближний маркер — шесть точек в секунду; средний маркер — поочередно два тире и шесть точек в секунду; дальний маркер (в материалах ИКАО — внешний маркер) — два тире в секунду.
Наземное оборудование системы СП-50 размещается в аэропортах гражданской авиации по единой типовой схеме.
В результате проведенной регулировки оборудования системы СП-50 в соответствии со стандартами ИКАО, принятыми для системы ИЛС, курсовые и глиссадные радиомаяки имеют следующие технические данные.
Зона курсового радиомаяка. Осевая линия зоны курса совмещается с осью ВПП. Линейная ширина зоны на расстоянии 1350 м от точки приземления равна 150 м (в пределах от 120 до 195 м), что соответствует угловому отклонению от продольной оси ВПП не менее 2° и не более 3°.
Дальность действия маяка обеспечивает прием сигналов на расстоянии более 70 км от начала ВПП при высоте полета 1000 м в секторе шириной по 10° с каждой стороны от оси ВПП (см. 91). Для курсового маяка ИЛС дальность действия регламентирована 45 км при высоте полета 600 м.
Зона глиссадного радиомаяка. Оптимальный угол наклона глиссады планирования равен 2°40′. При наличии препятствий в секторе подхода угол наклона глиссады увеличивается до 3°20′ и в исключительных случаях может доходить до 4—5°. При оптимальном угле наклона глиссады снижения 2°40′ самолет при снижении пролетает над дальним и ближним маркерами (при их стандартном расположении) на высотах соответственно 200 и 60 м.
Угловая ширина зоны глиссады при оптимальном угле ее наклона может быть в пределах 0,5—1°4, причем с увеличением угла наклона растет скорость снижения, а ширина зоны повышается для облегчения пилотирования самолета.
Дальность действия глиссадного радиомаяка обеспечивает прием сигналов на расстоянии не менее 18 км от него в секторах по 8® вправо и влево от линии посадки. Эти секторы, в которых обеспечивается прием сигналов, ограничены по высоте углом над горизонтом, равным 0,3 угла глиссады снижения, и углом над глиссадой, равным 0,8 угла глиссады снижения.
Наземное оборудование системы СП-50М предназначено для использования ее при директорном и автоматических заходах на посадку по нормам ИКАО 1-й категории сложности.
Стабильность залегания осевой линии курса обеспечивается более жесткими требованиями, предъявляемыми к аппаратуре.
В случаях когда длина ВПП значительно превышает оптимальную, ширина курсовой зоны устанавливается не менее 1°75′ (полузона).
Все остальные параметры курсоглиссадных маяков регулируются строго в соответствии с техническими нормами ИКАО.
Системы директорного управления заходом ка посадку
В настоящее время на самолетах гражданской авиации с ГТД устанавливаются системы директорного (командного) управления заходом на посадку («Привод», «Путь»). Эти системы являются системами полуавтоматического управления самолетом при заходе на посадку.
Командным прибором в таких системах является нуль-индикатор ПСП-48 или КПП-М.
Под полуавтоматическим управлением следует понимать пилотирование самолета по командному прибору, стрелки которого при заходе на посадку с момента начале четвертого разворота и на посадочной прямой необходимо удерживать на нуле. В отличие от обычного захода по СП-50 нуль-индикатор в данном случае не информирует пилота о положении относительно равносигнальных зон курсового и глиссадного маяков, а указывает ему, какие углы крена и тангажа нужно выдерживать для точного выхода в равносигнальные зоны и следования в них.
Система директорного управления упрощает пилотирование путем преобразования навигационно-пилотажной информации о положении самолета в пространстве и формирования ее в управляющий сигнал, который индицируется на командных приборах. Отклонение командной стрелки является функцией нескольких параметров, которые в обычном заходе на посадку пилот учитывает по отдельным приборам: ПСП-48 системы СП-50, авиагоризонт, компас и вариометр. Поэтому командные стрелки находятся в центре шкалы не только тогда, когда самолет следует строго в равносигнальных зонах курса и глиссады, но и когда осуществляется правильный выход к равносигнальным зонам.
На самолеты, уже находящиеся в эксплуатации, устанавливаются упрощенные системы директорного управления, действующие на базе существующего бортового и наземного оборудования: курсовой радиоприемник КРП-Ф, глиссадный радиоприемник ГРП-2, навигационный индикатор НИ-50БМ или задатчик курса ЗК-2Б, центральная гировертикаль ЦГВ или гиродатчики (АГД, ППС). Кроме того, в комплект входит: вычислитель, блок связи с автопилотом при наличии связи с АП на самолете.
Маневр захода на посадку на самолете, оборудованном системой директорного управления, выполняется таким образом:
1. Получив разрешение на вход в зону аэропорта, оборудованного системой СП-50 или ИЛС, экипаж, действуя в соответствии с утвержденной для данного аэропорта схемой, выводит самолет к месту начала четвертого разворвта; при этом экипаж обязан:
2. Момент начала четвертого разворота можно определить:
3. В момент начала четвертого разворота создать сторону отклонения курсовой планки командного прибора такой крен, при котором она установится на нуль шкалы. В процессе разворота пилот должен удерживать стрелку нуль-индикатора в центре шкалы, уменьшая или увеличивая крен. Крен всегда создается в сторону отклонения стрелки.
В случае раннего начала четвертого разворота для удержания курсовой стрелки в нулевом положении первоначально потребуется создать крен 17—20°, который впоследствии необходимо уменьшить в отдельных случаях вплоть до полного вывода самолета из крена. Однако при подходе к створу ВПП курсовая стрелка командного прибора покажет необходимость создания крена, потребного для плавного вписывания в линию посадки.
При позднем начале четвертого разворота происходит изменение курса на угол, больший чем 90°, и знак крена меняется. При этом весь маневр, включая и учет угла сноса, отрабатывается системой автоматически.
При выполнении четвертого разворота нужно постоянно следить, чтобы бленкеры курса были закрыты на всех нуль-индикаторах.
4. После выполнения четвертого разворота и входа в равносигнальную зону курса следует продолжать полет без снижения, удерживая кренами директорную стрелку командного прибора в центре шкалы. При
этом необходимо следить за стрелкой глиссады, которая после выполнения четвертого разворота будет отклонена вверх. Бленкеры глиссады должны быть закрыты.
Как только стрелка командного прибора приблизится к белому кружку, немедленно начать снижение, удерживая директорную стрелку глиссады в центре черного кружка.
5. По высоте пролета ДПРМ определить возможность продолжения снижения по глиссаде: если над ДПРМ при нахождении стрелки глиссады в пределах белого кружка высота полета будет равна или превышать установленную для данного аэропорта, то можно продолжать дальнейшее снижение по глиссаде; если же при правильном выдерживании глиссады самолет достиг установленной высоты пролета ДПРМ и не последовало сигналов фактического ее пролета, то немедленно прекратить снижение по глиссаде и в дальнейшем после пролета ДПРМ снижение производить по правилам, установленным для системы ОСП.
6. После пролета ДПРМ удерживать директорные стрелки командного нуль-индикатора в нулевом положении, не допуская при этом снижения вне видимости земли ниже установленного для данного аэропорта минимума погоды.
При обнаружении земли (посадочных огней) необходимо перейти на визуальный полет и произвести посадку.
Ошибки в установке курса на автомате НИ-50БМ, превышающие в сумме с углом сноса 15°, вообще не позволят осуществить заход на посадку по системе директорного управления. Во избежание этого перед началом четвертого разворота штурман должен вновь убедиться в правильности установки «Угла карты» на автомате курса НИ-50БМ й в правильности работы курсовой системы. При показаниях магнитного курса, значительно больших фактического курса на посадочной прямой, самолет будет отклоняться вправо от оси равносигнальной зоны курсового радиомаяка, а при заниженных показаниях — влево. Для обеспечения хорошей точности работы системы на посадочной прямой при больших углах сноса штурман должен обеспечить работу курсовой системы с высокой точностью; ошибка не должна превышать ±2°.
Кроме того, точность выхода самолета на ось ВПП и следования вдоль нее зависит также от точности залегания зоны курсового радиомаяка и установки на нуль курсовой стрелки поворотом кнопки на щитке управления СП-50.
.jpg/220px-Lumi%C3%A8res_et_ILS_de_la_piste_06_L_(3083202657).jpg)
Внедрение точных заходов на посадку с использованием недорогих систем GPS приводит к замене ILS. Для обеспечения требуемой точности с помощью GPS обычно требуется только маломощный всенаправленный дополнительный сигнал, передаваемый из аэропорта, что значительно дешевле, чем использование нескольких больших и мощных передатчиков, необходимых для полной реализации ILS. К 2015 году количество аэропортов США, поддерживающих заходы на посадку по LPV, подобным ILS, превысило количество систем ILS, и ожидается, что это в конечном итоге приведет к отмене ILS в большинстве аэропортов.
СОДЕРЖАНИЕ
Принцип действия
Балочные системы
Точность системы обычно составляла порядка 3 градусов. Хотя это было полезно для направления самолета на взлетно-посадочную полосу, оно не было достаточно точным, чтобы безопасно вывести самолет на дальность видимости в плохую погоду; самолет обычно снижается со скоростью от 3 до 5 градусов, и если бы он был на 3 градуса ниже, он бы потерпел крушение. Лучи использовались только для бокового наведения, и одной системы было недостаточно для выполнения посадки в сильный дождь или туман. Тем не менее, окончательное решение о посадке было принято всего в 300 метрах от аэропорта.
Концепция ILS
ILS начинается с смешивания двух модулирующих сигналов с несущей, один с частотой 90 Гц, а другой с частотой 150 Гц. Это создает сигнал с пятью радиочастотами в общей сложности, несущей и четырьмя боковыми полосами. Этот комбинированный сигнал, известный как CSB для «несущей и боковых полос», равномерно передается антенной решеткой. CSB также отправляется в схему, которая подавляет исходную несущую, оставляя только четыре сигнала боковой полосы. Этот сигнал, известный как SBO для «только боковых полос», также отправляется на антенную решетку.
Приемник перед массивом будет принимать оба этих сигнала, смешанные вместе. Используя простые электронные фильтры, исходную несущую и две боковые полосы можно разделить и демодулировать для извлечения исходных сигналов с амплитудной модуляцией 90 и 150 Гц. Затем они усредняются для получения двух сигналов постоянного тока (DC). Каждый из этих сигналов представляет не силу исходного сигнала, а силу модуляции относительно несущей, которая изменяется в шаблоне широковещательной передачи. Это имеет большое преимущество в том, что измерение угла не зависит от диапазона.
Хотя схема кодирования сложна и требует значительного количества наземного оборудования, результирующий сигнал намного более точен, чем более старые системы на основе луча, и гораздо более устойчив к распространенным формам помех. Например, статика в сигнале будет одинаково влиять на оба субсигнала, поэтому не повлияет на результат. Аналогичным образом, изменения общей мощности сигнала по мере приближения воздушного судна к взлетно-посадочной полосе или изменения из-за замирания мало повлияют на результаты измерения, поскольку они обычно одинаково влияют на оба канала. Система подвержена эффектам искажения из- за многолучевого распространения из-за использования нескольких частот, но поскольку эти эффекты зависят от местности, они обычно фиксируются по местоположению и могут быть учтены посредством регулировки антенны или фазовращателей.
Кроме того, поскольку именно кодирование сигнала в луче содержит информацию об угле, а не мощность луча, сигнал не должен быть сильно сфокусирован в пространстве. В более старых системах луча точность равносигнальной области зависела от формы двух направленных сигналов, что требовало, чтобы они были относительно узкими. Схема ILS может быть намного шире. Обычно требуется, чтобы системы ILS можно было использовать в пределах 10 градусов по обе стороны от осевой линии взлетно-посадочной полосы на 25 морских милях (46 км; 29 миль) и 35 градусов с каждой стороны на 17 морских милях (31 км; 20 миль). Это позволяет использовать самые разные пути захода на посадку.
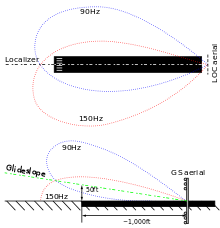
Многие иллюстрации концепции ILS часто показывают, что система работает более похожая на системы луча с сигналом 90 Гц с одной стороны и 150 с другой. Эти иллюстрации неточны; оба сигнала передаются по всей диаграмме направленности, меняется их относительная глубина модуляции.
Использование ILS
Самолет, приближающийся к взлетно-посадочной полосе, управляется приемниками ILS в самолете путем сравнения глубины модуляции. Многие самолеты могут направлять сигналы в автопилот для автоматического выполнения захода на посадку. ILS состоит из двух независимых подсистем. Локализатор обеспечивает боковое наведение; глиссада обеспечивает вертикальное наведение.
Локализатор

Курсор (LOC или LLZ до стандартизации ИКАО) представляет собой антенную решетку, обычно расположенную за пределами взлетно-посадочной полосы и обычно состоящую из нескольких пар направленных антенн.
Курсор позволяет самолету поворачиваться и совмещать самолет с взлетно-посадочной полосой. После этого пилоты активируют фазу захода на посадку (APP).
Склонность скольжения (G / S)


Пилот управляет самолетом таким образом, чтобы индикатор глиссады оставался в центре дисплея, чтобы гарантировать, что самолет следует глиссаде примерно на 3 ° над горизонтом (уровнем земли), чтобы оставаться над препятствиями и достигать взлетно-посадочной полосы в надлежащей точке приземления (т. Е. обеспечивает вертикальное наведение).
Ограничения
Из-за сложности систем курсового радиомаяка ILS и глиссады существуют некоторые ограничения. Системы курсового радиомаяка чувствительны к препятствиям в зоне трансляции сигнала, например, к большим зданиям или ангарам. Системы глиссады также ограничены местностью перед антеннами глиссады. Если местность наклонная или неровная, отражения могут создать неровную дорожку скольжения, вызывая нежелательные отклонения стрелки. Кроме того, поскольку сигналы ILS направляются в одном направлении за счет расположения решеток, глиссада поддерживает только заходы на посадку по прямой с постоянным углом снижения. Установка ILS может быть дорогостоящей из-за критериев размещения и сложности антенной системы.
Вариант
Идентификация
Мониторинг
Важно, чтобы любой отказ ILS обеспечить безопасное наведение был немедленно обнаружен пилотом. Для этого мониторы постоянно оценивают жизненно важные характеристики передач. Если обнаруживается какое-либо существенное отклонение, выходящее за строгие пределы, либо автоматически выключается ILS, либо компоненты навигации и опознавания снимаются с перевозчика. Любое из этих действий активирует индикацию («флаг отказа») на приборах самолета, использующего ILS.
Курс курсового радиомаяка
Маркерные маяки
На некоторых установках предусмотрены маркерные маяки, работающие на несущей частоте 75 МГц. При получении сигнала маркерного радиомаяка на приборной панели пилота включается индикатор, и пилот слышит сигнал радиомаяка. Расстояние от ВПП, на котором должно быть получено это указание, публикуется в документации для этого захода на посадку вместе с высотой, на которой воздушное судно должно находиться, если оно правильно установлено на ILS. Это обеспечивает проверку правильности работы глиссады. В современных установках ILS, DME устанавливается вместе с ILS, чтобы дополнять или заменять маркерные маяки. DME постоянно отображает расстояние самолета до взлетно-посадочной полосы.
Замена DME
Подходящее освещение
Высота решения / высота
Категории ILS
| Категория | Высота решения | RVR |
|---|---|---|
| я | > 200 футов (60 м) | > 550 м (1800 футов) или видимость> 800 м (2600 футов) |
| II | 100-200 футов (30-60 м) | ИКАО:> 350 м (1200 футов) FAA / JAA (EASA):> 300 м (1000 футов) |
| III А | 700 футов (200 м) | |
| III B | Специальные операции CAT II и CAT III |

В отличие от других операций, погодные минимумы CAT III не обеспечивают достаточных визуальных ориентиров, позволяющих совершить посадку вручную. Минимумы CAT IIIb зависят от контроля развертывания и резервирования автопилота, поскольку они дают пилоту достаточно времени, чтобы решить, приземлится ли самолет в зоне приземления (в основном CAT IIIa), и обеспечить безопасность во время развертывания (в основном CAT IIIb ). Следовательно, автоматическая система посадки является обязательной для выполнения операций категории III. Его надежность должна быть достаточной для управления воздушным судном до точки приземления при полетах по категории IIIa и путем перехода на безопасную скорость руления по категории CAT IIIb (и категории IIIc, если это разрешено). Тем не менее, некоторым операторам было предоставлено специальное разрешение на заходы на посадку по CAT III с ручным управлением с использованием наведения на лобовом дисплее (HUD), который предоставляет пилоту изображение, просматриваемое через лобовое стекло, с глазами, сфокусированными на бесконечности, необходимого электронного наведения для приземления. самолет без истинных внешних визуальных ориентиров.
В Соединенных Штатах аэропорты с подходами к посадке по категории III имеют списки категорий IIIa и IIIb или просто категории III на табличке для захода на посадку по приборам (правила терминала США). Минимальные значения RVR категории IIIb ограничиваются освещением ВПП / РД и вспомогательными средствами и соответствуют плану системы управления наземным движением в аэропорту (SMGCS). Для полетов ниже 600 футов RVR требуются огни осевой линии рулежной дорожки и красные огни полосы остановки. Если минимальные значения RVR CAT IIIb на конце взлетно-посадочной полосы составляют 600 футов (180 м), что является обычным показателем в США, подходы по ILS к этому концу взлетно-посадочной полосы с RVR ниже 600 футов (180 м) квалифицируются как CAT IIIc и требуют специального руления. процедуры, освещение и условия разрешения на посадку. Приказ FAA 8400.13D ограничивает CAT III RVR 300 футов или выше. Приказ 8400.13D (2009 г.) допускает подходы к взлетно-посадочным полосам категории II со специальным разрешением без огней приближения ALSF-2 и / или огней зоны приземления / осевой линии, что расширило число потенциальных взлетно-посадочных полос категории II.

Как для автоматических систем приземления, так и для систем HUD требуется специальное одобрение для конструкции оборудования, а также для каждой отдельной установки. В конструкции учтены дополнительные требования безопасности при эксплуатации воздушного судна вблизи земли и способность летного экипажа реагировать на аномалию системы. К оборудованию также предъявляются дополнительные требования по техническому обслуживанию, чтобы гарантировать, что оно способно поддерживать операции в условиях ограниченной видимости.
Конечно, почти вся эта подготовка пилотов и квалификационная работа проводится на тренажерах с разной степенью точности.
Использовать
В контролируемом аэропорту авиадиспетчерская служба будет направлять воздушное судно на курс курсового радиомаяка по заданным курсам, следя за тем, чтобы воздушные суда не подходили слишком близко друг к другу (выдерживали эшелонирование), а также максимально избегали задержек. Несколько самолетов могут находиться на ILS одновременно, на расстоянии нескольких миль друг от друга. Самолет, который повернул на входящий курс и находится в пределах двух с половиной градусов от курса курсового радиомаяка (отклонение на половину шкалы или меньше, показанное индикатором отклонения от курса), считается установленным на заходе на посадку. Обычно воздушное судно устанавливается на расстояние не менее 2 морских миль (3,7 км) до конечной точки захода на посадку (точки пересечения глиссады на указанной высоте).
Отклонение воздушного судна от оптимальной траектории указывается летному экипажу с помощью шкалы дисплея (переход с момента, когда движение аналогового измерителя показало отклонение от линии курса через напряжения, передаваемые с приемника ILS).
Выходной сигнал приемника ILS поступает в систему отображения (проекционный дисплей и проекционный дисплей, если они установлены) и может поступать в компьютер управления полетом. Процедура посадки воздушного судна может быть либо совмещенной, когда автопилот или компьютер управления полетом непосредственно управляет воздушным судном, а летный экипаж контролирует выполнение операции, либо отсоединенной, когда летный экипаж управляет воздушным судном вручную, чтобы держать индикаторы курсового радиомаяка и глиссады по центру.
История

Испытания системы ILS начались в 1929 году в США. Полнофункциональная базовая система была представлена в 1932 году в Центральном аэропорту Берлин- Темпельхоф (Германия), получившая название LFF или « луч Лоренца » по имени ее изобретателя, компании C. Lorenz AG. Совет по гражданской авиации (CAB) США санкционировал установку системы в 1941 году в шести местах. Первая посадка американского пассажирского авиалайнера с использованием ILS состоялась 26 января 1938 года, когда Boeing 247 D Пенсильванской компании Central Airlines вылетел из Вашингтона, округ Колумбия, в Питтсбург, штат Пенсильвания, и приземлился в метель, используя только систему посадки по приборам. Первая полностью автоматическая посадка с использованием ILS произошла в марте 1964 года в аэропорту Бедфорд в Великобритании.
Рынок
Поставщики
Ведущими производителями на рынке систем посадки по приборам являются:
Альтернативы
Будущее
Появление Глобальной системы позиционирования (GPS) обеспечивает альтернативный источник управления заходом на посадку для самолетов. В США глобальная система расширения (WAAS) доступна во многих регионах для обеспечения точного руководства в соответствии со стандартами категории I. Эквивалентная европейская геостационарная навигационная служба (EGNOS) была сертифицирована для использования в приложениях для обеспечения безопасности жизни в марте. 2011. Таким образом, количество систем ILS категории I может быть сокращено, однако в Соединенных Штатах нет планов по поэтапному отказу от каких-либо систем категории II или III.
Система локального расширения (LAAS) находится в стадии разработки для обеспечения минимумов Категории III или ниже. Управление наземной системы дополнения (GBAS) FAA в настоящее время работает с отраслью в ожидании сертификации первых наземных станций GBAS в Мемфисе, штат Теннесси; Сидней, Австралия; Бремен, Германия; Испания; и Ньюарк, штат Нью-Джерси. Все четыре страны установили системы GBAS и участвуют в деятельности по технической и оперативной оценке.
Группа компаний Honeywell и FAA получила одобрение на проектирование системы первого в мире нефедерального одобрения США для LAAS категории I в международном аэропорту Ньюарк Либерти, работающего в сентябре 2009 года, и эксплуатационного одобрения 28 сентября 2012 года.



