Сервосистема. Общие сведения о следящем приводе
Основные преимущества сервосистемы (перед ПЧ+АД):
Механическая характеристика сервопривода:

Эти контуры в зависимости от типа управления могут замыкаться либо в сервоусилителе, либо во внешнем управляющем контроллере.

Цель: обеспечить требуемый момент на двигателе.
Задание: из контура скорости или входа задания тока.
Обратная связь: датчик тока.
Коэффициенты: заданы на заводе-изготовителе.
Выход: управление ШИМ-ом
Цель: обеспечить вращение двигателя на заданной скорости.
Задание: из контура положения или с аналогового задатчика.
Обратная связь: датчик углового перемещения.
Выход: задание на контур тока.
Коэфициенты:
Цель: обеспечить перемещение нагрузки в заданную позицию.
Задание: из управляющего контроллера или серии импульсов.
Обратная связь: датчик углового положения.
Коэффициенты: усиление контура положения.
Выход: задание на контур скорости.
Режимы управления

1. Режим управления моментом (T)
Задача следящего привода – поддерживать заданный ток (и, следовательно, момент). Контур тока замкнут в самом приводе. Контуры скорости и положения замкнуты в управляющем контроллере.
2. Режим управления скоростью (S)
3. Режим управления положением (P или Pr)
Привод управляется серией импульсов (P) или дискретными командами (Pr) с управляющего контроллера. Контуры положения, скорости и тока замкнуты в сервоусилителе. В управляющем контроллере контуры не замыкаются, но есть возможность отслеживать текущую позицию. Все сложные задачи позиционирования выполняются в сервоусилителе, управляющий контроллер только выдает задание на отработку шага.
Области применения следящих приводов
Сервосистемы находят свое применение там, где обычный регулируемый или нерегулируемый привод не может обеспечить требуемую точность, динамичность или не подходит по размерам двигателя. В основном это различные механизмы: Фасовочное и разливочное оборудование, загрузочные агрегаты, металлообрабатывающие станки, электроэрозионные станки, полиграфическое оборудование, вязальные машины, летучие и барабанные ножницы, упаковочное оборудование, текстильное оборудование, аттракционы, а также различные роботы и манипуляторы. Благодаря жесткости механической характеристики сервопривод переменного тока активно заменяет привод постоянного тока, вытесняя его в узкоспециальные ниши.
следящий электропривод
Полезное
Смотреть что такое «следящий электропривод» в других словарях:
следящий электропривод — Электропривод, обеспечивающий перемещение исполнительного органа рабочей машины в соответствии с произвольно изменяющимися задающими сигналами. [ГОСТ Р 50369 92] Тематики электропривод DE Folgeantrieb … Справочник технического переводчика
СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД — обеспечивает воспроизведение механических перемещений контролируемого или управляемого объекта посредством исполнительного электродвигателя. Применяется в системах автоматического управления, передачи информации и измерения … Большой Энциклопедический словарь
следящий электропривод — 26 следящий электропривод: Электропривод, обеспечивающий перемещение исполнительного органа рабочей машины в соответствии с произвольно изменяющимися задающими сигналами Источник: ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал… … Словарь-справочник терминов нормативно-технической документации
следящий электропривод — обеспечивает воспроизведение механических перемещений контролируемого или управляемого объекта посредством исполнительного электродвигателя. Применяется в системах автоматического управления, передачи информации и измерения. * * * СЛЕДЯЩИЙ… … Энциклопедический словарь
СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД — электропривод, имеющий систему автоматич. регулирования, к рая обеспечивает перемещение исполнит. органа рабочей машины в соответствии с перемещением контролируемого объекта. С. э. содержит задающее устройство, датчик положения, устройства… … Большой энциклопедический политехнический словарь
Следящий электропривод — Следящая система, обеспечивающая воспроизведение некоторых механических перемещений на управляемом объекте посредством исполнительного электродвигателя (ИЭ). С. э. включает в себя задающее устройство, Измерительный преобразователь, орган… … Большая советская энциклопедия
Электропривод — электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом Привода. … … Большая советская энциклопедия
Электропривод — электрический привод, совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии по определённому закону. Э. является наиболее распространённым типом Привода. … … Большая советская энциклопедия
ГОСТ Р 50369-92: Электроприводы. Термины и определения — Терминология ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал документа: 3 (электро) двигатель (электропривода): Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.… … Словарь-справочник терминов нормативно-технической документации
электрический привод — (электропривод), совокупность устройств для преобразования электрической энергии в механическую и регулирования потока преобразованной энергии. Первый электропривод был создан в 1838 г. российским учёным Б. С. Якоби, который использовал… … Энциклопедия техники
Следящий гидропривод
Следящий гидропривод — это регулируемый гидропривод, в котором закон движения выходного звена (вала гидромотора или штока (в некоторых случаях корпуса) гидроцилиндра) изменяется в зависимости от управляющего воздействия.
Как правило к функциям слежения в следящем гидроприводе добавляются функции усиления управляющего сигнала по мощности. Поэтому синонимом термина следящий гидропривод считается термин гидроусилитель.
Содержание
Принцип работы гидроусилителя с золотниковым распределителем
Одна из возможных конструктивных схем гидроусилителя показана на рис. 1.



В этой схеме перемещение управляющей рукоятки вправо через механическую связь вызывает смещение золотника также вправо. При этом открываются каналы золотникового гидрораспределителя, в результате чего жидкость от насоса подаётся в правую полость гидродвигателя, в качестве которого применён двухштоковый гидроцилиндр. В этой полости гидроцилиндра создаётся избыточное давление, и, как следствие, выходное звено движется вправо, то есть в том же направлении, что и рукоятка. Поскольку выходное звено жёстко связано с корпусом распределителя, то перемещение выходного звена вызывает такое же по величине перемещение корпуса распределителя (рис. 2). В результате смещения корпуса распределителя, каналы в гидрораспределителе перекрываются поясками золотника и подача жидкости от насоса в полость гидроцилиндра прекращается. Таким образом, и управляющая рукоятка, и выходное звено гидродвигателя движутся синхронно. Однако за счёт того, что усилие на выходном звене создаётся за счёт давления, развиваемого насосом, то это усилие многократно больше чем усилие, прикладываемое к рукоятке оператором. Коэффициент усиления следящих гидроприводов практически неограничен, и мощность входного сигнала может быть уменьшена до ничтожно малой величины (примерно 0,5 Вт).
В рассмотренной конструкции распределителя перемещение золотника может вызываться не только линейным перемещением управляющей рукоятки, но и, при небольших конструктивных изменениях, возможно осуществить входное движение золотника с помощью вращательного движения руля (например, через винтовую передачу).
Профиль поясков золотника
Иногда пояски золотников гидрораспределителей выполняют с небольшой конусностью (6°-10°) (рис. 4). Тогда открытие каналов распределителя происходит более плавно, чем в распределителях с золотниками с цилиндрическими поясками (рис. 5). Соответственно, при открытии каналов более плавно нарастает и подача жидкости в полости гидродвигателя, и поэтому «трогание с места» и остановка выходного звена гидроусилителя также происходит более плавно. Иными словами, при наличии конусности в конструкции золотников чувствительность гидроусилителя снижается.

Рис. 4. Пояски золотника при наличии конусности; при такой конструкции «трогание с места» и остновка выходного звена гидроусилителя происходит более плавно

Рис. 5. Цилиндрические пояски золотника
Гидроусилители с клапанными распределителями
Помимо золотниковых распределителей в конструкциях гидроусилителей иногда применяют клапанные распределители. Одна из возможных конструктивных схем такого гидроусилителя приведена на рис. 6.

В таком гидроусилителе при перемещении ручки управления влево открывается верхний клапан, и жидкость от насоса по каналам внутри гидроусилителя подаётся в левую полость цилиндра. При этом в этой полости создаётся избыточное давление, под действием которого поршень начинает перемещаться влево, то есть в ту же сторону, в которую была перемещена ручка управления. Поскольку поршень жёстко связан с корпусом распределителя, то перемещение поршня вызывает точно такое же по величине и направлению перемещение корпуса распределителя. В свою очередь смещение корпуса закрывает верхний клапан, и подача жидкости в левую полость цилиндра прекращается, и соответственно прекращается движение поршня. Таким образом, выходное звено (шток поршня) движется синхронно с входным звеном (ручкой управления).
При движении поршня влево жидкость из левой полости цилиндра вытесняется в гидроаккумулятор.
Когда ручка управления перемещается вправо, верхний клапан закрыт, но открывается нижний клапан, и жидкость из правой полости цилиндра идёт на слив в бак. Движение поршня при этом происходит вправо под действием давления, создаваемого гидроаккумулятором.
Гидроусилители с клапанными распределителями имеют высокую точность воспроизведения по сравнению с гидроусилителями с золотниковыми распределителями, поскольку в золотниковых распределителях имеется мёртвая зона, обусловленная тем, что ширина поясков золотника обычно делается несколько больше диаметра перекрываемых каналов (положительное перекрытие; абсолютно точного совпадения ширины поясков и диаметров каналов не удаётся достичь по технологическим причинам изготовления деталей). В клапанных распределителях мёртвая зона может быть легко устранена.
Гидроусилитель крутящего момента
Гидроусилитель крутящего момента — вид следящего гидропривода, в котором гидродвигателем служит либо гидромотор, либо поворотный гидродвигатель.
В данном типе гидроусилителей обычно используется гидравлический распределитель с поворотным золотником, выполненным в виде крана, при этом у распределителя имеется отслеживающая втулка.

Струйные усилители
Струйные усилители выполняются на базе струйных распределителей.

По сравнению с гидроусилителями механического типа, струйные усилители обладают высоким быстродействием. Частота переключений газовых струйных усилителей достигает нескольких кГц. Усилители, работающие на маловязких жидкостях, имеют быстродействие на порядок меньше, чем газовые, однако и их быстродействие удовлятворяет практику.
Схема действия одного из видов струйных усилителей показана на рис. 8. При повороте трубки 1 на небольшой угол по часовой стрелки поток Q подаётся в правую полость гидроцилиндра 2. В этой полости создаётся избыточное давление, и корпус будет смещаться вправо до тех пор, пока не восстановится равновесие и поток вновь не будет поделён на две равные части. Таким образом, корпус гидроцилиндра 2 отслеживает движения трубки 1.
Чувствительность гидроусилителей
Не любой сигнал, подаваемый на вход гидроусилителя, вызывает соответствующее движение выходного звена. Например, для гидроусилителя на рис. 1 при некоторых небольших перемещениях рукоятки выходное звено при определённых значениях этого перемещения будет оставаться в покое. Это обусловлено тем, что элементы креплений механической передачи от рукоятки к золотнику имеют люфты. Пока эти люфты не выбраны, золотник будет оставаться в покое. Соответственно, в покое будет оставаться и выходное звено гидроусилителя. Кроме того, по технологическим причинам ширина поясков золотника обычно делается несколько большей, чем диаметр перекрываемых каналов (положительное перекрытие), а значит, на начальном этапе движения золотника каналы распределителя будут перекрыты, и жидкость от насоса не будет поступать к полости гидродвигателя, и поэтому выходное звено будет оставаться в покое. Таким образом, по объективным причинам чувствительность гидроусилителя не может быть абсолютной.
Строго говоря, под чувствительностью понимают комплекс качеств, позволяющих с минимальной ошибкой (по времени и пути) заданные перемещения входа преобразовывать в перемещения выходного звена. При этом ошибка по времени характеризует быстродействие, а по пути — точность гидроусилителя.
Помимо ширины поясков и люфтов механической передачи на чувствительность оказывают влияние утечки рабочей жидкости через зазоры между деталями распределителя, трение в элементах конструкции, упругость деталей и самой рабочей жидкости гидроусилителя, а также нагрузка выхода, влияющая на давление в гидросистеме, а значит, и на утечки.
Чувствительность является одним из основных требований, предъявляемых к следящим гидроприводам.
Применение следящих гидроприводов
Примером следящего гидропривода является гидроусилитель руля, широко применяемый в автомобилях. Следящий гидропривод применяется в тех случаях, когда непосредственное управление тем или иным механизмом требует от человека слишком больших усилий. Кроме автомобилей, следящие гидроприводы устанавливают на тракторах, на судах, используют в авиации, робототехнике и других сферах.
История
См. также
Примечания
Ссылки
Литература

 | Это заготовка статьи о технике. Вы можете помочь проекту, исправив и дополнив её. Это примечание по возможности следует заменить более точным. |
Полезное
Смотреть что такое «Следящий гидропривод» в других словарях:
следящий гидропривод (следящий пневмопривод) — Гидропривод (пневмопривод) с ручным или автоматическим управлением, в котором регулируемый параметр выходного звена изменяется по определенному закону в зависимости от внешнего воздействия, значение которого заранее неизвестно. [ГОСТ 17752 81]… … Справочник технического переводчика
Гидропривод, следящий — Следящий гидропривод Гидропривод с ручным или автоматическим управлением, в котором регулируемый параметр выходного звена изменяется по определенному закону в зависимости от внешнего воздействия, значение которого заранее неизвестно Смотреть все… … Словарь ГОСТированной лексики
ГОСТ 17752-81. ГИДРОПРИВОД ОБЪЕМНЫЙ И ПНЕВМОПРИВОД. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ (СТ СЭВ 2455—80) — Агрегат, насосный Блок гидроаппаратов Блок пневмоаппаратов Вантуз … Словарь ГОСТированной лексики
ГОСТ 17752-81. ГИДРОПРИВОД ОБЪЕМНЫЙ И ПНЕВМОПРИВОД. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ (СТ СЭВ 2455—80) — Агрегат, насосный Блок гидроаппаратов Блок пневмоаппаратов Вантуз … Словарь ГОСТированной лексики
Пневмопривод, следящий — Следящий пневмопривод Пневмопривод с ручным или автоматическим управлением, в котором регулируемый параметр выходного звена изменяется по определенному закону в зависимости от внешнего воздействия, значение которого заранее неизвестно Смотреть… … Словарь ГОСТированной лексики
Золотник, следящий — Ндп. см. Гидрораспределитель, дросселирующий, Пневмораспределитель, дросселирующий Смотреть все термины ГОСТ 17752 81. ГИДРОПРИВОД ОБЪЕМНЫЙ И ПНЕВМОПРИВОД. ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ Источник: ГОСТ 17752 81. ГИДРОПРИВОД ОБЪЕМНЫЙ И ПНЕВМОПРИВОД.… … Словарь ГОСТированной лексики
Усилитель — Усилитель элемент системы управления (или регистрации и контроля), предназначенный для усиления входного сигнала до уровня, достаточного для срабатывания исполнительного механизма (или регистрирующих элементов), за счёт энергии… … Википедия
Гидроусилитель крутящего момента — Гидроусилитель крутящего момента вид следящего гидропривода, в котором гидродвигателем служит либо гидромотор, либо поворотный гидродвигатель. В данном типе гидроусилителей обычно используется гидравлический распределитель с поворотным… … Википедия
Гидроусилитель руля — … Википедия
Гидрораспределитель, дросселирующий — Дросселирующий гидрораспределитель Ндп. Следящий золотник Регулирующий гидроаппарат, предназначенный для управления расходом и направлением потока рабочей среды в нескольких гидролиниях одновременно в соответствии с изменением внешнего… … Словарь ГОСТированной лексики
СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД
Следящим называется электропривод, который обеспечивает с заданной точностью движение исполнительного органа рабочей машины в соответствии с произвольно изменяющимся сигналом управления. Этот сигнал управления может изменяться в широких пределах по произвольному временному закону и иметь как механическую, так и электрическую природу. Чаще всего входной сигнал представляет собой скорость или угол поворота оси или вала. Следящий электропривод применяется для антенн радиотелескопов и систем спутниковой связи, в копировальных станках, для привода исполнительных органов роботов и манипуляторов, в автоматических измерительных устройствах и во многих других случаях.
Структурная схема следящего электропривода представлена на рис. 6.13. Он состоит из датчиков 1 и 2 входного и выходного сигналов, измерителя рассогласования 3, системы управления 4 и электродвигателя с механической передачей 5, который приводит в движение исполнительный орган 6 в рабочей машине.

Датчики входной и выходной величин преобразуют механические величины (скорость или угол поворота вала) в электрические – входной сигнал Uвх и сигнал обратной связи Uо,с. Измеритель рассогласования 3, алгебраически суммируя эти сигналы, вырабатывает сигнал рассогласования UD, поступающий в систему управления электродвигателем 4. Следящий электропривод по своей структуре представляет собой замкнутую автоматическую систему.
Система управления 4 состоит из усилителя (регулятора) и силового преобразователя, которые обеспечивают необходимое преобразование сигнала рассогласования UD в напряжение U, поступающее на двигатель. За счет выбора схем усилителя (регулятора) и преобразователя или введения корректирующих устройств обеспечивается необходимый закон изменения этого напряжения во времени u(t).
Электродвигатель и механическая передача 5 в соответствии с законом изменения u(t) обеспечивают перемещение исполнительного органа 6. Иногда двигатель с механической передачей называют исполнительным механизмом (сервомеханизмом).
Классификация следящего электропривода может быть выполнена по нескольким признакам. Если следящий электропривод предназначен для воспроизведения с заданной точностью скорости движения исполнительного органа, то он называется скоростным, а если положения – то позиционным.
По виду характеристики системы управления 5 различают следящие электроприводы с непрерывным или прерывным управлением; последние, в свою очередь, делятся на релейные и импульсные.
Отличительной особенностью следящих электроприводов непрерывного действия является непрерывное управление электродвигателем, пропорциональное сигналу рассогласования.
Следящий электропривод релейного действия характеризуется тем, что напряжение на двигатель подается только в том случае, когда сигнал рассогласования достигает определенного значения. До этого значения сигнала рассогласования напряжение на двигатель не подается и он неподвижен. Поэтому релейный следящий электродвигатель имеет определенную зону нечувствительности.
Импульсный следящий электропривод отличается тем, что управляющее воздействие на электропривод подается в виде импульсов напряжения, амплитуда, частота или скважность которых изменяется в зависимости от сигнала рассогласования. В этих случаях говорят соответственно об амплитудно-, частотно- и широтно-импульсной модуляции сигнала управления.
В следящем электроприводе используются двигатели переменного и постоянного тока, различные виды усилителей (электромашинные, магнитные, полупроводниковые, пневматические, гидравлические), датчики скорости и положения.
а) Следящий электропривод постоянного тока непрерывного действия с ЭМУ
Схема следящего электропривода этого вида приведена на рис. 6.14. Двигатель постоянного тока независимого возбуждения М приводит в движение рабочую машину РМ через механическую передачу Р. Якорь двигателя М получает питание от электромашинного усилителя поперечного поля (ЭМУ), который в этой схеме выполняет функции силового преобразователя и одного из усилителей системы.
В качестве датчиков входной Qвх и выходной Qвых величин в данной схеме используются сельсины, работающие в трансформаторном режиме. Один из них, называемый сельсином-приемником СП, является датчиком выходной величины Qвых и устанавливается на валу редуктора Р. Другой сельсин, называемый сельсином-датчиком СД, преобразует входной сигнал Qвх в электрический. При показанном на схеме соединении обмоток статоров СД и СП и питании обмотки ротора СД однофазным напряжением переменного тока Uв напряжение  на обмотке ротора СП будет пропорционально разности углов Qвх и Qвых, т. е.
на обмотке ротора СП будет пропорционально разности углов Qвх и Qвых, т. е.
 (6.9)
(6.9)
а фаза этого напряжения будет определяться знаком угла рассогласования Q.
Следовательно, в рассматриваемой схеме включения сельсины СД и СП позволяют выделить сигнал рассогласования т. е. выполняют одновременно функции измерителя рассогласования (элемент 3 на рис. 6.13) и датчиков входной и выходной величин.
Сигнал рассогласования переменного тока поступает на вход фазочувствительного усилителя У1, который усиливает его и преобразует в сигнал постоянного тока, полярность которого определяется фазой сигнала , т. е. знаком разности углов Qвх и Qвых. Далее этот сигнал, пройдя через корректирующее звено (резисторы R1, R2 и конденсатор С1), поступает на вход усилителя У2, который осуществляет дополнительное усиление сигнала рассогласования.
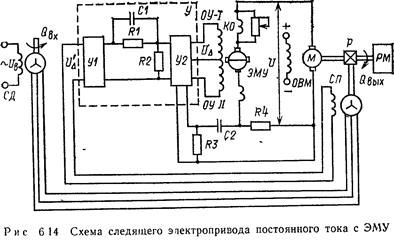
Выходное напряжение усилителя У2, представляющее собой результирующий сигнал управления следящего электропривода UD, подается на обмотки управления ЭМУ ОУ—I и ОУ—II, включенные по дифференциальной схеме с нулевой точкой. В результате такого включения магнитный поток ЭМУ определяется разностью МДС обмоток ОУ—I и ОУ—II, т. е. разностью токов, протекающих по этим обмоткам. Полярность напряжения U на выходе ЭМУ, подаваемого на якорь двигателя М определяется знаком (полярностью) сигнала UD.
Помимо корректирующего звена, состоящего из элементов R1, R2 и С1, в схеме используется дополнительное корректирующее звено, в состав которого входят резисторы R3, R4 и конденсатор С2. Эти корректирующие звенья обеспечивают требуемое качество регулирования выходных координат электропривода Qвых и  в динамических режимах его работы.
в динамических режимах его работы.

Работа следящего электропривода происходит следующим образом.
В исходном, согласованном положении Qвх=Qвых,  и двигатель М неподвижен. При изменении Qвх возникает угол рассогласования Q между положениями роторов сельсинов СП и СД и в соответствии с (6.9) на обмотке ротора СП появляется сигнал . В зависимости от фазы этого сигнала, которая определяется знаком разности
и двигатель М неподвижен. При изменении Qвх возникает угол рассогласования Q между положениями роторов сельсинов СП и СД и в соответствии с (6.9) на обмотке ротора СП появляется сигнал . В зависимости от фазы этого сигнала, которая определяется знаком разности  , на двигатель М будет подано напряжение U такой полярности, при которой вращение двигателя и исполнительного органа рабочей машины РМ будет происходить в направлении, уменьшающем угол рассогласования Q. При достижении углом рассогласования Q нулевого значения и постоянстве Qвх двигатель М отключается и вновь будет находиться в неподвижном состоянии. Таким образом, следящий электропривод работает только при возникновении угла рассогласования между осями датчика и приводного двигателя (исполнительного органа рабочей машины). Процесс работы следящего электропривода сводится к непрерывному автоматическому устранению возникающего рассогласования.
, на двигатель М будет подано напряжение U такой полярности, при которой вращение двигателя и исполнительного органа рабочей машины РМ будет происходить в направлении, уменьшающем угол рассогласования Q. При достижении углом рассогласования Q нулевого значения и постоянстве Qвх двигатель М отключается и вновь будет находиться в неподвижном состоянии. Таким образом, следящий электропривод работает только при возникновении угла рассогласования между осями датчика и приводного двигателя (исполнительного органа рабочей машины). Процесс работы следящего электропривода сводится к непрерывному автоматическому устранению возникающего рассогласования.
Рассматриваемый следящий электропривод с ЭМУ применяется на мощности от нескольких ватт до десятков киловатт. Он отличается высокой перегрузочной способностью, не вносит искажения в форму питающего напряжения, а при торможении двигателя обеспечивает рекуперацию энергии в сеть. Переход из режима двигателя в режим генератора обеспечивается естественными характеристиками электрических машин и происходит без резких изменений момента двигателя, что имеет большое значение для получения требуемых точности и плавности работы следящего электропривода.
Вместе с тем следящий электропривод, в котором используются электромашинные преобразователи и усилители, характеризуется существенными недостатками. Это относительно невысокое быстродействие, значительные массы и габариты силовой части электропривода, невысокий КПД (0,5–0,6), значительный уровень шума за счет вращающихся частей электромашинного агрегата.
В связи со сказанным в современных системах следящего электропривода обычно используются статические полупроводниковые усилители и преобразователи, применение которых позволяет устранить большинство из отмеченных недостатков, свойственных электромашинным преобразователям.
б) Следящий электропривод постоянного тока с тиристорным преобразователем
Схема следящего электропривода с ДПТ, якорь которого питается от реверсивного ТП, приведена на рис. 6.15.
Особенностью данного электропривода является применение измерительной схемы на основе двух синусно-косинусных вращающихся трансформаторов (СКВТ). Один из них – СKВТ-Д является датчиком входного сигнала Qвх, а другой – СКВТ-П – датчиком выходной величины Qвых. СКВТ имеет на статоре и роторе по две взаимно перпендикулярно расположенные в пространстве обмотки, схема соединения которых видна из рисунка. При повороте ротора СKВТ—Д в обмотках ротора наводится переменная ЭДС, амплитуда которой пропорциональна  одной обмотке и
одной обмотке и  – в другой. В остальном принцип измерения угла рассогласования 6=6вх–6вых и выделения сигнала рассогласования Уд е=о такой же, что и в случае применения сельсинов, однако СКВТ обеспечивают большую точность.
– в другой. В остальном принцип измерения угла рассогласования 6=6вх–6вых и выделения сигнала рассогласования Уд е=о такой же, что и в случае применения сельсинов, однако СКВТ обеспечивают большую точность.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет



