Что такое стабилизатор самолета? Действия при отказе
В этом видео рассказываю что такое стабилизатор на примере Боинг 737-800 и демонстрирую действия при его отказе.
Вот руль высоты это жесть.
Ну, это в том случае если электроника отказала. А если механически откажет стабилизатор?
В 37 ещё можно успеть пойти учиться в пилоты?


Как я был задержан полицией во время съемки военных самолетов

В целом общение свелось к тому, что полицейский прямо спросил, фотографирую ли я что-либо кроме самолетов. Получив отрицательный ответ, он попросил мою камеру и просмотрел все снимки сделанные в этот день. Поскольку, снимал я «очередями», это заняло у него немало времени, но он старательно пролистал каждый снимок. После этого он вернул мне камеру, взял мое водительское удостоверение, и удалился что-то обсуждать по рации. Тем временем над нами пролетел еще один самолет Ф-18 Хорнет и, пока он говорил по рации, я не стал тратить время, достал фотоаппарат и продолжил свои фотографические упражнения.
(У меня в машине была включена видеокамера и записанный полный разговор можно увидеть в видео, приведенном в конце статьи).
F/A-18 Hornet, заходящий на посадку:

Что интересного можно увидеть, просто прогуливаясь вокруг этой авиабазы?
Если подойти с северо-западной стороны, то оказываешься прямо напротив вертолетных площадок, где постоянно взлетали и садились тяжелые грузовые вертолеты CH-53E Super Stallion.

Также я видел несколько конвертопланов V-22 Osprey. Офис моей работы находится как раз на линии воздушного коридора авиабазы и обычно я каждый день вижу Оспреи пролетающие над головой. В этот день я ожидал заснять их взлет и посадку, но мои ожидания не оправдались. Оспреи ездили туда-сюда, поворачивали свои двигатели, но взлетать наотрез отказались.

Кроме Супер-Сталлиона и Оспреев я видел много Хорнетов Ф-18 в самых разных конфигурациях: одно- и двухпилотные, с одним, двумя подвесными баками и совсем без дополнительных баков.

Хотя, старый Ф-18 по-прежнему остается основной рабочей лошадкой американской морской пехоты, на базе появилась эскадрилья новых самолетов пятого поколения Ф-35.

Воздушный танкер на базе С-130 Геркулес:

В целом, те, кто интересуется военной техникой в действии, а не в музеях, найдут для себя много интересного, просто прогуливаясь вокруг этой авиабазы. Но поскольку самолеты и вертолеты все-таки находятся не совсем на расстоянии вытянутой руки, лучше иметь при себе бинокль или фотоаппарат с длиннофокусным объективом. Я предполагаю, что реакция вояк на чужака с биноклем будет похожей на то, как они отреагировали на мои экскурсы с камерой с большим теле-объективом, так что лучше быть готовым к подобному развитию событий, как на видео ниже.
Стабилизатор самолета
Стабилизатор самолета выступает в качестве несущей хвостовой поверхности и отвечает за продольную устойчивость воздушного судна.
В отличие от крыльев он имеет симметрично выпуклый профиль по двум поверхностям. Таким образом есть возможность управлять рулями высоты в разных условиях их положения. В случае несимметричного профиля обтекание стабилизатора не будет одинаковым, а за ним и рули высоты при опускании или поднятии будут обтекаться неодинаково.
Стоит отметить, что устройство стабилизатора практически ничем не отличается от устройства крыла. Он состоит из двух лонжеронов (заднего и переднего), раскосов, нервюр, передней кромки, расчалок, обода и мелких деталей. Его конструктивная особенность заключается в том, что задний лонжерон выступает в качестве детали, формирующей заднюю кромку. Рули высоты подвешены к заднему лонжерону.
Лонжероны стабилизатора имеют коробчатую форму. Причем на некоторых конструкциях У-2 лонжероны делаются цельными: задний – однотаврового сечения, передний – двутаврового.
Коробчатые лонжероны более легкие, но производить их сложнее. По направлению к консолям сечение лонжеронов уменьшается. В соответствии с профилем стабилизатора задний лонжерон имеет немного большую высоту.

Через задний лонжерон проходит 7 вильчатых болтов, предназначенных для установки стабилизатора и подвески рулевой высоты. Передний лонжерон имеет 2 болта, которые крепят на фюзеляже стабилизатора.
Нервюры устроены точно таким же образом, как и нервюры крыла: основные нервюры коробчатого типа, простые облегчены (они имеют одну стенку с облегчающими прорезями). Полки нервюр стабилизатора в отличие от нервюр крыла состоят не из сосны, а из липы. Другое их отличие состоит в том, что у них нет хвостовой части.
Что касается раскосов стабилизатора самолета, то они представляют собой те же коробчатые нервюры, но поставленные под наклоном. Они сходятся посредине заднего лонжерона в общий узел.
Для жесткости стабилизатор самолета расчален четырехмиллиметровой проволокой.
Обход стабилизатора, как и обход крыльев, состоит из кольчугалюминиевых швеллерных полос, имеющих толщину в 0,8 мм. Обход – это продолжение передней кромки стабилизатора самолета и составляет с ним единое целое.
Стабилизатор устанавливается в щели между фюзеляжем и нижней частью киля. В центральной части его переднего лонжерона для крепления стабилизатора установлены 2 вертикальных вильчатых болта, которые соединяются на верхних лонжеронах фюзеляжа ушковыми болтами. Задний лонжерон крепится 1 горизонтальным вильчатым болтом, который прикрепляется на отверстии металлической гребенки, установленной на лонжероне киля.
В местах соединения раскосов с лонжеронами помещены все 3 вильчатых болта.
Снизу стабилизатор поддерживается с помощью четырех подкосов (по 2 с каждой стороны). Они сделаны из стальной трубы и имеют эллипсовидное сечение. Подкосы крепятся на стабилизаторе под основными нервюрами, где на всех сторонах стабилизатора сформировались два пролета, а к нижнему лонжерону на узлах последнего полета. У самолетов 1936 года выпуска усиленные ушки подкосов.
На конце подкосов находится вильчатый болт, с помощью которого регулируется их длина во время установки на фюзеляж стабилизатора.
Передние подкосы короче задних, что соответствует сужению хвостовой части, и имеют на обоих концах регулировочные болты, в то время как на переднем подкосе есть только 1 регулировочный болт, находящийся на верхнем конце.
Стабилизатор неуправляемый в полете, но на земле его можно отрегулировать и установить под определенным установочным углом. В лонжероне киля для установки стабилизатора имеется гребенка с отверстиями.
Установка стабилизатора на конкретный угол в лонжероне киля осуществляется через гребенку с отверстиями. То или иное отверстие для установки выбирается с учетом нагрузки самолета, тем самым создавая необходимые для равновесия самолета условия.
Киль – орган путевой устойчивости, который позволяет воздушному судну самостоятельно сохранять заданное ему направление полета. В том случае, если самолет во время полета отклонится в какую-то сторону (к примеру, из-за сильного порыва ветра), то киль, восприняв давление воздуха боковыми стенками, будет стремиться вернуть лайнер к прямолинейному полету. Хвост противодействует стремлению самолета сбиваться с курса и «рыскать» в стороны.
Киль поставлен неподвижно и находится в плоскости продольной симметрии воздушного судна. Один его лонжерон поставлен вертикально, другой – под наклоном. Также он состоит их трех нервюр, раскосов, стрингеров и обшивки (материи и фанеры).
Изменять положение киля ни на земле перед полетом, ни в полете нельзя, поскольку лонжерон киля выступает замыкающей стойкой фюзеляжа.
Наклонно поставленным лонжероном образована передняя часть киля. На нижнем конце лонжерона надета обжимка из стали, выступающая в роли переднего узла крепления.
Вертикальный лонжерон представлен в виде сплошного бруска. Верхняя его часть крепит детали киля, а нижняя связывает фермы задней части фюзеляжа.
Вертикальный и наклонный лонжероны соединены тремя горизонтальными нервюрами, которые образуют форму профиля киля. Основание киля составляет нижняя нервюра, по этой причине она более широкая. Срезанную форму имеет киль в верхней части, что сделано для прохода компенсатора руля направления.
Внизу вертикального лонжерона для присоединения к фюзеляжу надеты две обоймы, выступающие узлами крепления.
К вертикальному лонжерону подвешен руль направления посредством 4 шарниров точно такого же устройства, какое имеют рули высоты.
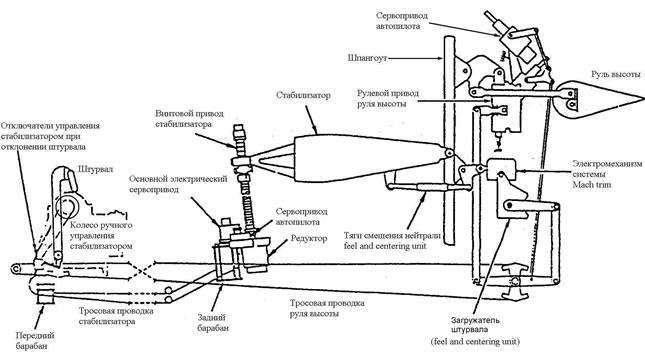
Управление стабилизатором
Также обеспечена механическая связь со стабилизатором с помощью колеса управления и тросовой проводки. На случай заклинивания любого из электродвигателей предусмотрена муфта, разъединяющая проводку управления стабилизатором от электродвигателей. Чтобы сработала муфта, надо приложить усилие к колесу управления и сделать примерно пол-оборота.
Диапазон работы автопилота ограничен 0,25 – 14 units (0.05 – 14.5 на NG).
Управление от переключателей на штурвале еще более ограничено: 0,25 – 12,5 (0.05 – 14.5 на NG) при выпущенных закрылках и 2,5 – 12,5 (3.95 – 14.5 на NG) при убранных.
Управление электродвигателем ручного триммирования выполняется от нажимных переключателей на штурвалах пилотов. Один из переключателей отвечает за направление триммирования, а второй включает питание электродвигателя.
Нажатие этих переключателей при подключенном автопилоте приводит к его отключению.
При отклонении штурвальной колонки от нейтрали срабатывают выключатели, прерывающие цепь управления стабилизатором в сторону противоположную отклонению. Например, при взятии штурвала на себя невозможно отклонить стабилизатор на пикирование. Чтобы отключить данное ограничение на центральном пульте есть выключатель «OVERRIDE». Его нужно использовать при заклинении проводки рулём высоты, чтобы управлять самолётом по тангажу с помощью только одного стабилизатора.
Автопилот управляет стабилизатором с помощью сервопривода автопилота. Скорость перекладки также зависит от положения закрылков. При выпущенных закрылках она равна скорости ручной перекладки с убранными закрылками, а при убранных – в два раза меньше.
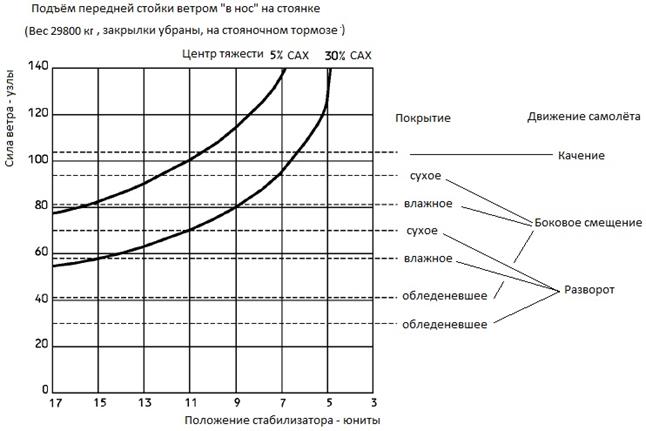
При постановке самолёта на стоянку на длительный период следует стабилизатор отработать полностью на пикирование. В зимний период это связано с предотвращением затекания противообледенительной жидкости и растаявшего снега/слякоти в полости балансировочных панелей руля высоты. В остальной период это имеет смысл для предотвращения подъёма передней стойки самолёта на стоянке от порыва встречного ветра (особенно пустого, незаправленого самолёта).
Ниже приведён график зависимости силы ветра, способного опрокинуть самолёт на хвост в зависимости от положения стабилизатора, а также пунктирными линиями показана сила ветра, приводящая к смещению самолёта.
Система улучшения устойчивости по скорости на малых скоростях
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS) и работает только при отключенном автопилоте.
Система управляет стабилизатором с помощью сервопривода автопилота для обеспечения устойчивости по скорости. Её срабатывание возможно вскоре после взлета или при уходе на второй круг. Условиями, способствующими срабатыванию, являются малый вес, задняя центровка и высокий режим работы двигателей.
См. ( http://aviacom.ucoz.ru/Principleflight2.doc ) стр. 17-18, 23
Система улучшения устойчивости по скорости применяется в области полетов на скоростях 90 – 250 узлов. Если компьютер улавливает изменение скорости, то система автоматически включается при выпущенных закрылках (на 400/500 независимо от закрылков), оборотах двигателей N1 более 60%. При этом должно пройти более 5 секунд после предыдущего ручного триммирования и не менее 10 секунд после отрыва от ВПП.
Принцип работы заключается в перекладывании стабилизатора в зависимости от изменения скорости самолета, таким образом, чтобы при разгоне самолет имел тенденцию к задиранию носа и наоборот. (При разгоне 90 – 250 узлов стабилизатор автоматически перекладывается на 8 градусов на кабрирование). Кроме изменений скорости компьютер учитывает обороты двигателей, вертикальную скорость и приближение к сваливанию. Чем выше режим двигателей, тем быстрее начнет срабатывать система. Чем больше вертикальная скорость набора высоты, тем больше стабилизатор отрабатывает на пикирование. При приближении к углам сваливания система автоматически отключается.
При торможении самолёта стабилизатор автоматически перекладывается на пикирование.
Система двухканальная. При отказе одного канала полет разрешается. При двойном отказе вылетать нельзя. Если двойной отказ произошел в полете, QRH не требует никаких действий, но логично было бы повысить контроль за скоростью на этапах захода на посадку и ухода на второй круг.
Согласно отчета, самолет при заходе на посадку потерял скорость до 82 узлов (20 узлов менее VREF), вышел на режим сваливания. Экипаж при выводе самолета из сваливания вывели двигатели на режим превышающий полную взлетную мощность. При этом, кабрирующий момент от двигателей был так велик, что для его парирования не хватило полной отдачи штурвальной колонки от себя и тангаж самолета увеличился до 44 градусов.
AAIB подчеркнуло в своем отчете, что в QRH (Quick Reference Handbook) не отражен тот факт, что для вывода самолета из сваливания может потребоваться использование стабилизатора для противодействия кабрирующему моменту двигателей и что экипажи должны быть предупреждены об этом.

Путевое управление самолетом обеспечивается рулем направления. Перемещения педалей управления по тросовой проводке передаются на вертикально расположенную трубу (torque tube) в киле самолета. Вращение этой трубы через тяги связи передается на главный рулевой привод (main PCU) и резервный рулевой привод (standby PCU). К этой же трубе снизу прикреплен загружатель педалей (feel and centering unit), который имитирует аэродинамическую нагрузку на педалях и обеспечивает фиксированное положение руля направления при работе рулевого привода.
На руле отсутствует сервокомпенсатор, то есть отклонять руль направления в полете мускульным усилием практически невозможно.
Главный рулевой привод работает от гидросистем А и В. Резервный привод питается от резервной (standby) гидросистемы. Работа любой из трех гидросистем полностью обеспечивает путевое управление.
В главный рулевой привод встроен исполнительный механизм демпфера рысканья. (см. Боковая устойчивость и управляемость.) Он запитан от гидросистемы В.
Триммирование руля направления с помощью ручки на центральном пульте осуществляется смещением нейтрали механизма триммерного эффекта. Там же находится шкала с указателем отклонения руля направления в units.
На самолетах серии 300-500 производилась модификация схемы управления рулем направления (RSEP modification). RSEP –Rudder System Enhancement Program. Внешний признак выполнения данной модификации – дополнительное табло «STBY RUD ON» в левом верхнем углу панели FLIGHT CONTROL.
Модификация должна быть выполнена на всех самолетах до ноября 2008 года. Причиной явились две катастрофы и инцидент, в которых предположительной причиной назван отказ рулевого привода руля направления.
Первая катастрофа произошла 3 марта 1991 года с Боингом 737-200 в районе города Colorado Springs в США. (Источник информации: NATIONAL TRANSPORTATION SAFETY BOARD
WASHINGTON, D.C. 20594 AIRCRAFT ACCIDENT REPORT)
За 6 дней до катастрофы на этом самолете в полете возникло правое скольжение, которое экипаж устранил, выключив демпфер рыскания. Техсостав провел работы по демпферу, но скольжение повторилось через два дня снова. Опять демпфер был выключен и на земле были выполнены работы. В дальнейших полетах, вплоть до катастрофы, замечаний не было.
3 марта в 9.37 утра второй пилот доложила, что полосу наблюдает, и получила разрешение на визуальный заход на полосу 35. Ветер был 320 градусов 16 порывы 29 узлов. Также диспетчер доложил, что предшествующий борт докладывал о сдвиге ветра на глиссаде.
В 9.41 диспетчер дал команду после посадки не пересекать полосу 30, которая занята взлетающими бортами. Второй пилот подтвердила прием информации. Это была последняя передача экипажа.
В процессе разворота на посадочный с креном 20 градусов второй пилот доложила «1000 футов». В последующие 4 секунды темп разворота резко усилился. Она сказала «О, бог», тяга двигателей стала возрастать, поступила команда командира «Закрылки 15», что говорило о попытке уйти на второй круг.
Тем не менее, вращение продолжалось, скорость выросла до 200 узлов и перегрузка до 4. При столкновении самолет пикировал с углом тангажа 80 градусов.
Вторая катастрофа произошла 8 сентября 1994 года с Боингом 737-300 в районе города Aliquippa в США.
Инцидент произошел 9 июня 1996 года в районе города Richmond в США.
Предположительной причиной этих происшествий был самопроизвольный уход руля направления в крайнее положение. Это приводило к неконтролируемому кренению самолёта.
Главный рулевой привод руля направления до модификации RSEP имел двойной золотник (внутренний и внешний). Если они были слишком плотно подогнаны и имели значительное трение между собой, а пилот, по каким – либо причинам, допускал резкое движение педалями, то золотник мог уйти в крайнее положение и, соответственно, открыть путь гидрожидкости к полному неконтролируемому отклонению руля.
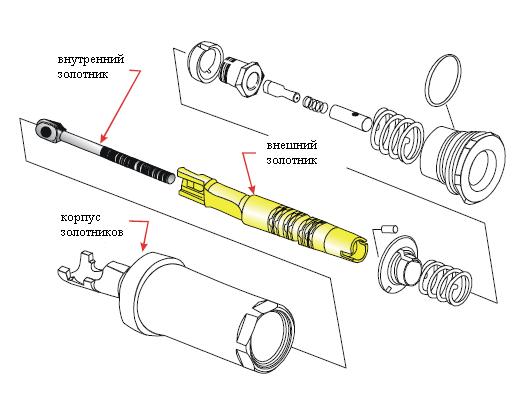
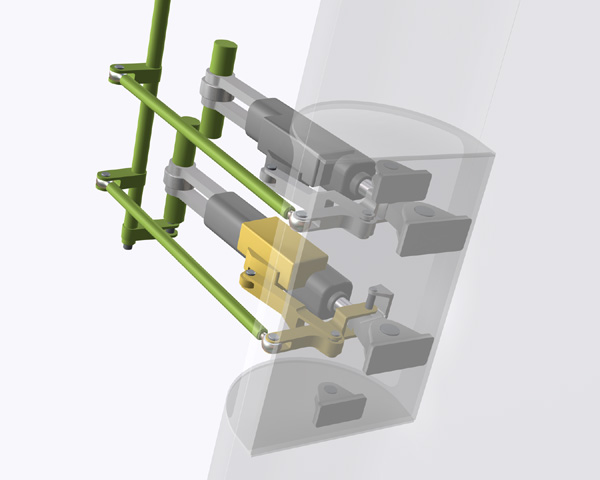
После модификации RSEP в главном рулевом приводе руля направления стало два независимых золотника, работающих от системы А и В. Соответственно к каждому из них подходит независимый рычаг управления. См. рисунки: вверху до модификации, внизу – после.
Поскольку полное отклонение руля высоты может потребоваться только на этапах взлёта, посадки и ухода на второй круг для парирования разворачивающего момента при отказе двигателя, а на остальных этапах полёта это не нужно и даже опасно, то в системе управления рулём направления предусмотрено ограничение давления подаваемой гидрожидкости.
На «классике» это ограничение включается при наборе высоты более 1000 футов и отключается при снижении ниже 700 футов. На «NG» это происходит, соответственно, при разгоне скорости более 135 узлов и при торможении менее 135 узлов. У пилотов нет ни какой индикации работы системы ограничения давления, за исключением – на «классике», если в гидросистеме А прошла команда на увеличение давления, а оно не увеличилось, то загорается лампа “LOW PRESSURE” на пульте FLT CONTROL «A».
Система связи штурвального колеса с рулём направления
На самолётах модификации «NG» установлена новая система, автоматически отклоняющая руль направления при отклонении командирского штурвального колеса по крену WTRIS (wheel to rudder interconnect system). Данная система включается в работу, когда оба переключателя FLT CONTROL находятся в положении STB RUD и включен YAW DAMPER, то есть когда самолёт управляется вручную мускульными усилиями пилотов. При этом резервный рулевой привод отклоняет руль направления для облегчения управления самолётом по крену.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Что такое стабилизатор в автопилоте
СТАБИЛИЗАТОРЫ С ИЗМЕНЯЕМЫМ УГЛОМ УСТАНОВКИ
Стабилизатор с изменяемым углом установки приме¬няется в следующих целях:
а) для облегчения пилотирования при широком диапазоне
изменения центровки;
б) для облегчения пилотирования при широком диапазоне
изменения скоростей полета;
в) для преодоления значительных изменений балансировки
самолета, которые могут иметь место при работе средств увели¬
чения подъемной силы крыла, без ограничения отклонения руля
высоты;
г) для уменьшения балансировочного лобового сопротивления
до минимума.
Как указывалось выше, для реактивных самолетов необхо¬димы более широкие диапазоны изменения центровки и скоростей, чем для самолетов с ПД. Если для типичного самолета с ПД ско¬рость VNE равняется, скажем, 520 км/ч, тодля реактивного само¬лета скорость VM0 = 700 км/ч является вполне обычной ско¬ростью. Каждое из указанных выше требований, взятое в от¬дельности, вряд ли оправдало бы применение стабилизатора с изменяемым углом установки, но при совокупности требований его применение становится безусловно необходимым, особенно при таком сочетании требований, когда в одном случае нужно увеличить отклонение стабилизатора вверх, а в другом — вниз.
.
Заключение
При использовании стабилизатора с изменяемым углом уста¬новки не следует забывать о его очень большой эффективности. Поскольку при этом руль высоты в сбалансированном состоянии всегда находится в нейтральном положении и его возможности не ограничены расходами на балансировку, площадь руля высоты может быть меньшей, чем при неподвижном стабилизаторе. Это происходит потому, что задача создания основной части управ¬ляющего момента тангажа, необходимой для балансировки само¬лета, возлагается на стабилизатор и только остальная часть управ¬ляющего момента обеспечивается с помощью руля высоты.
Чрезмерно большая эффективность стабилизатора с изменяе¬мым углом установки при правильной работе системы является хорошим помощником, однако при неправильной работе это его свойство становится чрезвычайно опасным. Нормальные ма¬невры должны выполняться только с помощью руля высоты, ‘ а к использованию стабилизатора следует прибегать лишь для того, чтобы снять усилия со штурвальной колонки по окончании маневра. Если в крайних случаях все же придется использовать стабилизатор в помощь рулю высоты при выполнении маневров, то отклонять его следует медленно, осторожно, короткими им¬пульсами, особенно на больших скоростях, и все время проверять, какое действие это оказывает на самолет. Прежде чем дальше изменить угол отклонения стабилизатора, необходимо осознать результат предыдущего его отклонения.
Если перед взлетом стабилизатор был установлен очень неточно, то существует большая вероятность того, что усилия, возникаю¬щие на штурвальной колонке, будут слишком велики, чтобы с ними можно было справиться. Если же пилоту и удастся их преодолеть, то самого полного отклонения руля высоты может оказаться недостаточно для управления самолетом. Поэтому очень важно, чтобы установка стабилизатора перед взлетом была выполнена точно в соответствии с положением ц. т. самолета.
Описанные выше трудности обычно возникают в системе, состоящей из стабилизатора, отклоняемого силовым приводом, и руля высоты, отклоняемого вручную. Отклонять такой руль высоты на большие углы крайне трудно, не говоря уже о том, что в проводке управления будут происходить большие потери хода из-за упругих деформаций. В результате эффективный ста¬билизатор будет полностью доминировать над рулем высоты с пониженной эффективностью. (Подобного рода снижение эффек¬тивности руля высоты может произойти под влиянием числа М на систему ручного управления, например, при очень больших числах М.)
Этих трудностей можно избежать, если снабдить руль высоты бустерным управлением, при котором можно отклонять руль на большие углы, прикладывая умеренные усилия. Кроме того, при бустерном управлении рулем высоты неправильная установка стабилизатора на взлете, хотя и нежелательна, но не так опасна по своим последствиям. При таком руле становится возможным осуществлять взлет с неправильно установленным стабилиза¬тором в любом положении «взлетного диапазона» углов установки стабилизатора и на первых 60 метрах набора высоты управлять самолетом одной рукой.
Дэвис
«Пилотирование больших реактивных самолетов»
Дедушка так и сказал:
. Нормальные маневры должны выполняться только с помощью руля высоты, ‘ а к использованию стабилизатора следует прибегать лишь для того, чтобы снять усилия со штурвальной колонки по окончании маневра.
В чем проблема если назвать это триммированием?



