Введение. Определения (кинематика, динамика, статика, траектория, системы отсчета, уравнение движения).
Вопросы к зачету.
Кинематика.
Обработка и представление результатов измерений (виды погрешностей, оценка случайных величин).
Разница между результатом измерения и истинным значением измеряемой величины называется погрешностью измерения. Выделяют следующие виды погрешностей:1) абсолютная погрешность;2) относительна погрешность;3) приведенная погрешность;4) основная погрешность;5) дополнительная погрешность;6) систематическая погрешность;7) случайная погрешность;8) инструментальная погрешность;9) методическая погрешность;10) личная погрешность;11) статическая погрешность;12) динамическая погрешность. Оценка случайных погрешностей. Случайные погрешности трудно устранить. Они проявляются в рассеивании результатов многократных измерений одной и той же величины. Оценку случайных погрешностей производят с помощью теории вероятности и математической статистики.
Введение. Определения (кинематика, динамика, статика, траектория, системы отсчета, уравнение движения).
Механика— учение о простейшей форме движения материи, которое состоит в перемещении тел или их частей друг относительно друга.
Биомеханика — раздел естественных наук, изучающий на основе моделей и методов механики механические свойства живых тканей, отдельных органов и систем, или организма в целом, а также происходящие в них механические явления.
Кинематика— раздел механики, в котором изучается движение тел без рассмотрения причин, вызывающих движение.
Динамика— раздел механики, посвященный изучению движения материальных тел под действием приложенных к ним сил.
Статика— раздел механики, в котором изучаются условия равновесия механических систем под действием приложенных к ним сил и моментов.
Непрерывная линия, которую описывает точка при своем движении, называется траекторией.
Система отсчёта – это система координат, тело отсчета, с которым связана система координат, и прибор для измерения времени.
Уравнение движения — уравнение или система уравнений, задающие закон эволюции механической или динамической системы (например, поля) во времени и пространстве.
3. Кинематические характеристики движения. Перемещение, скорость (мгновенная, средняя), пройденный путь.
Скорость – это количественная характеристика движения тела. Средняя скорость – это физическая величина, равная отношению вектора перемещения точки к промежутку времени Δt, за который произошло это перемещение. 
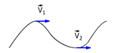 Мгновенная скорость физическая величина, равная пределу, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt: V=lim▲r/▲t=dr/dt. Вектор мгновенной скорости направлен по касательной к траектории движения тела.
Мгновенная скорость физическая величина, равная пределу, к которому стремится средняя скорость при бесконечном уменьшении промежутка времени Δt: V=lim▲r/▲t=dr/dt. Вектор мгновенной скорости направлен по касательной к траектории движения тела.
4. Ускорение, ускорение при криволинейном движении, тангенциальное и нормальное ускорения.
Ускорение— физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от скорости по времени. Ускорение является векторной величиной, показывающей, на сколько изменяется вектор скорости тела при его движении за единицу времени.
Ускорение при криволинейном движении:ускорение равно производной скорости точки по времени. Формула ускорения при криволинейном движении:
a = dv / dt
Ускорение является вектором. Вектор ускорения можно представить в виде суммы векторов:
 a = aτ + an
a = aτ + an
Тангенциальное ускорение характеризует быстроту изменения скорости движения по численному значению и направлена по касательной к траектории.
 Нормальное ускорение характеризует быстроту изменения скорости по направлению.
Нормальное ускорение характеризует быстроту изменения скорости по направлению.
5.  Кинематика вращательного движения. Вращение по окружности с постоянной скоростью.
Кинематика вращательного движения. Вращение по окружности с постоянной скоростью.
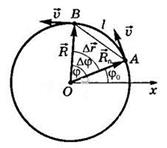
Положение тела на окружности определяется радиусом-вектором, проведенным из центра окружности. Модуль радиуса-вектора равен радиусу окружности R.
6. Поступательное и вращательное движение твердого тела. Угловая скорость, угловое ускорение.
 Движение тела может быть, как поступательным так и вращательным. При поступательном движение любая прямая, проведенная в теле, перемещается параллельно самой себе.
Движение тела может быть, как поступательным так и вращательным. При поступательном движение любая прямая, проведенная в теле, перемещается параллельно самой себе.
 Вращательным движением твёрдого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся _по окружностям, центры которых лежат на одной прямой (ось вращения).
Вращательным движением твёрдого тела вокруг неподвижной оси называется такое движение, при котором все точки тела движутся _по окружностям, центры которых лежат на одной прямой (ось вращения).
Динамика.
7. Динамика материальной точки. Первый закон Ньютона.
Динамика изучает движение тел с учетом причин, вызывающих это движение. Основу динамики составляют законы Ньютона.
Первый закон Ньютона (закон инерции). Тело (материальная точка), не подверженное внешним воздействиям, либо находится в покое, либо движется прямолинейно и равномерно. Свойств тел сохранять состояние покоя или равномерного прямолинейного движения 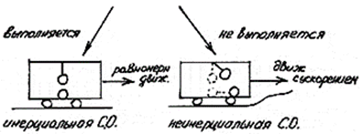 называют инерцией тела. Система отсчета, по отношению к которой выполняется закон инерции, называется инерциальной системой отсчета. Системы отсчета, движущиеся относительно любой инерциальной системы отсчета с ускорением, являются неинерциальными.
называют инерцией тела. Система отсчета, по отношению к которой выполняется закон инерции, называется инерциальной системой отсчета. Системы отсчета, движущиеся относительно любой инерциальной системы отсчета с ускорением, являются неинерциальными.
8. Второй закон Ньютона. Закон сохранения импульса.
 Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и её ускорением. Причиной возникновения ускорения является сила, действующая на тело. Силой называется векторная величина, характеризующая воздействие на данное тело со стороны других тел. F=mw. Единица измерения силы: 1Н=1 кг*м\с2..
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и её ускорением. Причиной возникновения ускорения является сила, действующая на тело. Силой называется векторная величина, характеризующая воздействие на данное тело со стороны других тел. F=mw. Единица измерения силы: 1Н=1 кг*м\с2..

Закон сохранения импульса: векторная сумма импульсов тел, составляющих замкнутую систему, не меняется с течением времени при любых движениях и взаимодействиях этих тел.
9. Третий закон Ньютона.
 Третий закон Ньютонаутверждает, что силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти материальные точки: F1=-F2.
Третий закон Ньютонаутверждает, что силы взаимодействия двух материальных точек равны по модулю, противоположны по направлению и действуют вдоль прямой, соединяющей эти материальные точки: F1=-F2.
10. Система единиц измерений физических величин в механике.
Среди многочисленных физических величин существуют основные базовые, через которые выражаются все остальные с помощью определенных количественных соотношений. Это – длина, время и масса. Рассмотрим подробнее эти величины и их единицы измерения. Длина– мера для измерения расстояния. Метр – единицадлины. Время – мера измерение разных промежутков времени. Секунда – эта единица времени. Если длина и время – фундаментальные характеристики времени и пространства, то масса является фундаментальной характеристикой вещества. Массой обладают все тела: твердые, жидкие, газообразные. Масса характеризует равные свойства материи. Килограмм – единица массы.
11. Динамика системы материальных точек.
Динамика систем материальных точек – основа динамики твердых тел, поскольку последние можно представить в виде системы материальных точек, расстояния между которыми остаются неизменными из-за сил взаимодействия, чрезвычайно быстро возрастающих при отклонении этих точек от своего положения равновесия. Тот факт, что взаимное расположение материальных точек в таких твердых телах остается неизменным, позволяет определить его положение в каждый момент времени заданием всего лишь шести параметров. Такими параметрами могут служить, например, три координаты какой-либо произвольной точки тела и три угла, определяющих его ориентацию относительно некоторой системы координат.
В динамике широко используется понятие центра масс системы материальных точек,который обычно обозначают буквой С. В однородном поле сил тяжести центр масс совпадает с центром тяжести системы. P(c)=V(c)*m- движение центра масс частиц.
12. Второй закон Ньютона для движения системы материальных точек.
 Второй закон Ньютона: скорость изменения импульса материальной точки во времени равна действующей на неё силе
Второй закон Ньютона: скорость изменения импульса материальной точки во времени равна действующей на неё силе
— уравнение движения материальной точки.
13. Виды взаимодействия (сил). Гравитационные силы. Масса инертная и гравитационная.
Физическими называются взаимодействия, приводящие к изменению скорости тел. Физические взаимодействия делятся на 2 типа: фундаментальные и производные. Фундаментальные взаимодействия:
 Сила гравитационного взаимодействия двух материальных точек: F=Gm1m2/r^2.
Сила гравитационного взаимодействия двух материальных точек: F=Gm1m2/r^2.
Пассивная гравитационная масса показывает, с какой силой тело взаимодействует с внешними гравитационными полями — фактически эта масса положена в основу измерения массы взвешиванием в современной метрологии. Активная гравитационная масса показывает, какое гравитационное поле создаёт само это тело — гравитационные массы фигурируют в законе всемирного тяготения. Инертная масса характеризует меру инертности тел и фигурирует в одной из формулировок второго закона Ньютона.
Физика Б1.Б8.
Электронное учебное пособие по разделу курса физики Механика
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
Введение
Механика – это раздел физики, который изучает наиболее простой вид движения материи – механическое движение и причины, вызывающие или изменяющие это движение.
Механическое движение – это изменение во времени взаимного расположения тел или частей одного и того же тела. Причиной, вызывающей механическое движение тела или его изменение, является воздействие со стороны других тел.
Развитие механики началось еще в древние времена, однако, как наука она формировалась в средние века. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564-1642) и английским ученым И. Ньютоном (1643-1727).
Механику Галилея-Ньютона принято называть классической механикой. В ней изучается движение макроскопических тел, скорости которых значительно меньше скорости света с в вакууме. Законы движения тел со скоростями, близкими к скорости света сформулированы А. Эйнштейном (1879-1955), они отличаются от законов классической механики. Теория Эйнштейна называется специальной теорией относительности и лежит в основе релятивистской механики. Законы классической механики неприемлемы к описанию движения микроскопических тел (элементарных частиц – электронов, протонов, нейтронов, атомных ядер, самих атомов и т.д.) их движение описывается законами квантовой механики.
Механика состоит из трех разделов: кинематики, динамики и статики. Кинематика дает математическое описание движения, не касаясь причин, которыми вызвано движение. Динамика – основной раздел механики, она изучает законы движения тел и причины, которыми вывзывается движение и его изменение. Статика изучает законы равновесия системы тел под действием приложенных сил. Мы ограничимся изучением двух основных разделов – кинематики и динамики.
В механике для описания движения в зависимости от условий решаемой задачи пользуются различными упрощающими моделями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело, и т.д. Выбор той или иной модели диктуется необходимостью учесть в задаче все существенные особенности реального движения и отбросить несущественные, усложняющие решение.
Материальная точка – это тело обладающее массой, размеры и форма которого несущественны в данной задаче. Любое твердое тело или систему тел можно рассматривать как систему материальных точек. Для этого любое тело или тела системы нужно мысленно разбить на большое число частей так, чтобы размеры каждой части были пренебрежимо малы по сравнению с размерами самих тел.
Абсолютно твердое тело – это тело, расстояние между любыми точками которого остается неизменным в процессе движения или взаимодействия. Эта модель пригодна, когда можно пренебречь деформацией тел в процессе движения.
Абсолютно упругое и абсолютно неупругое тело – это два предельных случая реальных тел, деформациями которых можно и нельзя пренебречь в изучаемых процессах.
Любое движение рассматривается в пространстве и времени. В пространстве определяется местоположение тела, во времени происходит смена местоположений или состояний тела в пространстве, время выражает длительность состояния движения или процесса. Пространство и время –это два фундаментальных понятия, без которых теряется смысл понятия движения: движения не может быть вне времени и пространства.
Теоретическую механику подразделяют на статику, кинематику и динамику
Главная > Документ
| Информация о документе | |
| Дата добавления: | |
| Размер: | |
| Доступные форматы для скачивания: |
Теоретическую механику подразделяют на статику, кинематику и динамику.
Статика изучает свойства сил и условия равновесия тел под действием сил.
Кинематика рассматривает движение тел как перемещение в пространстве; характеристики тел и причины, вызывающие движение, не рассматриваются.
Динамика изучает движение тел под действием сил.
Tеоретическая механика изучает законы движения некоторых абстрактных абсолютно твердых тел :
материалы и форма тел существенного значения не имеют;
при движении абсолютно твердое тело не деформируется и не разрушается.
В случае, когда размерами тела можно пренебречь, тело заменяют материальной точкой.
Понятие о силе и векторе силы
Сила — это мера механического взаимодействия материальных тел между собой. Силы могут вызвать движение тела, либо (если движение невозможно – например, тело закреплено) его деформацию, т.е. изменение формы тела и размеров.

Для определения величины силы используют динамометры (силомеры):
Величины, встречающиеся в физике, механике и др. смежных с ними дисциплинах, делят на величины скалярные и величины векторные.
Скалярные величины характеризуются только своим численным значением (положительным или отрицательным): температура, время, объем, масса, энергия
Векторные величины характеризуются не только численным значением (модулем), но и направлением: сила, скорость, ускорение и др.

Совокупность сил, действующих на какое-либо тело, называют системой сил.
Уравновешенной (эквивалентной нулю) системой сил называется такая система, которая, будучи приложенной к телу, не изменяет его состояния.

Все теоремы и уравнения статики выводятся из нескольких исходных положений. Эти положения называют аксиомами статики.


Следствие из второй аксиомы: Силу, действующую на твердое тело, можно перемещать вдоль линии ее действия

Третья аксиома статики (правило параллелограмма сил)
Вместо параллелограмма можно построить треугольник сил: силы вычерчивают одну за другой в любом порядке; равнодействующая двух сил соединяет начало первой силы с концом второй.

Четвертая аксиома статики : При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие.
Несмотря на то., что как и в первой аксиоме, силы, с которыми два тела действуют друг на друга, всегда равны по модулю и направлены вдоль одной прямой в разные стороны, они не уравновешиваются, т.к. с илы действующие и противодействующие в данном случае всегда приложены к разным телам, причем в отличие от первой аксиомы, таких сил может быть несколько и, безусловно, они не будут уравновешены.
Задание (у тела есть масса – активная сила )


Задание (у тела есть масса – активная сила )
Введение. Основные разделы термеха: статика, кинематика, динамика.

Курс теоретической механики состоит из трех основных разделов: статика, кинематика, динамика. Иногда еще добавляют аналитическую механику это отдельный раздел термеха, который приближен к динамике.
Основные понятия теоретической механики.
Основным понятием теоретической механики отличающим ее от других наук, является понятие абсолютно твёрдого тела. Абсолютно твердое тело это тело в котором расстояние между любыми точками не меняется при любом воздействии. Такая модель вводится только в том случае когда мы можем пренебрегать деформациями тела, либо они слишком не значительны.
Теоретическая механика из всего раздела механики наиболее приближена к математике, иногда не понятно по математике или по механике решаете задачу, для расчетов в термехе применяют различные математические модели. Казалось бы наука совсем не прикладная, но она очень важна для инженеров, для различных расчетов и для науки в целом. Успехи человечества в освоении космоса напрямую связаны с термехом, потому что до запуска любой ракеты обязательно предшествует расчет всех траекторий и тд., а это как раз таки осуществляется с помощью законов теоретической механики.
Начинается курс изучения со статики. Статика изучает абсолютно твердые тела находящиеся в состоянии равновесия это подразумевает то что на тело могут действовать силы, но этим силам противодействуют другие силы, в результате чего тело остаётся в равновесии, то есть не подвижно. Задача статики заключается в том чтобы при известных силах действия узнать силы противодействующие называемые реакциями, также задачей термеха является определение внутренних силовых факторов.
После изучения раздела статики следует раздел кинематика точки. Кинематика это раздел термеха изучающий движение материальных тел не учитывая причины вызвавшие это движение. Основной задачей кинематики является определение всех величин характеризующих движение, используя законы движения материального тела.
Третий и пожалуй самый сложный раздел из всего курса это динамика. Динамика изучает уравнение свободного и не свободного движения точки. Для изучения этого раздела нужны хорошие знания высшей математики. В заключении можно сказать что термех это фундаментальная наука для инженера, которая даёт базовые знания для изучения дальнейших предметов.
Статика, кинематика, динамика
Моменты силы относительно точки. План скоростей (ускорений) механизма, его кинематический анализ. Поступательное, вращательное движение твердого тела. Принцип Даламбера для материальной точки. Приведение сил инерции точек твердого тела к простейшему виду.
| Рубрика | Физика и энергетика |
| Вид | лекция |
| Язык | русский |
| Дата добавления | 25.09.2017 |
| Размер файла | 704,9 K |

Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Теоретическая часть
1. Статика
1.1 Типы связей и реакций связей
1.2 Принцип освобождаемости от связей
Принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие реакциями. В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного под действием активных (заданных) сил и реакций связей.
Приведенная аксиома дает возможность применить к несвободному телу условия равновесия, справедливые для свободного тела. Для этого следует мысленно отбросить связи, наложенные на тело, заменив их действие соответствующими силами, равными реакциям связей. Затем нужно рассмотреть равновесие несвободного тела как тела свободного, находящегося под действием активных сил и реакций, связей.
Определение модулей и направлений реакций связей имеет первостепенное практическое значение, так как согласно четвертой аксиоме, зная реакции, будем знать и силы давления на связи. А это, в свою очередь, позволит, пользуясь законами сопротивления материалов, рассчитать прочность конструкций или сооружений.
При решении некоторых задач о равновесии тела можно сразу указать направление реакций связей, поэтому остается определить модули реакций связей.
Во многих задачах статики для их упрощения условно пренебрегают силами трения между связью и телом. Связь в таких случаях считают идеально гладкой в отличие от реальной связи, в которой учитывается влияние сил трения.
Таким образом, различают связи без трения (идеальные) и связи с трением (реальные).
кинематический поступательный даламбер инерция
1.3 Пара сил. Момент силы относительно точки
Парой сил называются две параллельные силы, равные по модулю и противоположно направленные.
1. Пара сил не имеет равнодействующую, т.к. силы расположены на параллельных прямых.
2. Действие пары сил на тело не изменяется, если её перенести на какое-либо другое место на плоскости.
3. Две пары оказывают одинаковое действие на тело, если их моменты эквивалентны.
4. Проекции пары сил на две взаимоперпендикулярные плоскости равны.
Плечом называется расстояние между линией действия силы и точкой, взятой по перпендикуляру.
1.4 Теорема Пуансо
Главным моментом системы сил относительно центра называют вектор, равный сумме моментов всех сил системы относительно центра.
Главным вектором системы сил называют вектор, равный сумме всех сил системы
1.5 Теорема Вариньона
Отметим, что к равнодействующей приводятся система сходящихся сил и система параллельных сил, для которых главный момент равен нулю.
За центр приведения может быть выбрана любая точка тела, и поэтому выражения справедливы для любого центра, когда система сил приводится к равнодействующей. Так доказана теорема Вариньона в самом общем виде.
Выражения являются векторными для пространственной системы сил и алгебраическими для плоской системы сил, когда
Теорема Вариньона может быть распространена и на моменты относительно осей, например, для оси OZ, так как момент силы относительно оси равен проекции на эту ось момента относительно центра на оси:
Итак, произвольная система сил приводится к одной силе и паре сил, причем сила является статическим инвариантом системы сил. Эту же систему сил можно привести к динамическому винту, в котором сила и момент пары будут статическими инвариантами. Кроме того, произвольная система сил может быть представлена в простейшем виде, как две силы, не лежащие в одной плоскости.
В частных случаях, когда система сил приводиться к одной силе или равнодействующей, выполняется теорема Вариньона о моменте равнодействующей, справедливая для векторов-моментов, алгебраических моментов и моментов силы относительно оси.
2. Кинематика
2.1 План скоростей
Планом скоростей (ускорений) механизма называют чертеж, на котором изображенные в виде направленных отрезков векторы, которые в масштабе определяют модуль и направление скоростей (ускорений) разных точек звеньев для данного положения механизма. План скоростей (ускорений) механизма является совокупностью планов скоростей (ускорений) отдельных звеньев, которые построены из одного полюса, общего для всех звеньев.
Кинематический анализ механизма проводится в таком порядке:
— сначала определяются кинематические параметры начального звена;
— дальше выполняется кинематическое исследование отдельных структурных групп Ассура в последовательности их присоединения к начальному звену при образовании механизма. При этом, каждое звено механизма рассматривается как таковая, что осуществляет плоское движение; необходимо определить скорость и ускорение по меньшей мере двух ее точек. Этими точками являются центры шарниров вращательных пар и одноименные точки элементов поступательных кинематических пар. Как сказано, построение планов выполняется по структурным группам в порядке их присоединения, начиная с начального звена. В этом случае в каждой группе Ассура будут известные скорости и ускорения внешних кинематических пар, которыми присоединяется данная группа. Исследование каждой группы должно начинаться с определения кинематических параметров внутренней пары, которая является общей для звеньев, которые образуют эту пару. Потом, при потребности, определяются кинематические параметры других характерных точек группы и угловые скорости и ускорения звеньев.
Пусть известны скорости нескольких точек плоского сечения тела (рис.9). Если эти скорости отложить в масштабе из некоторой точки О и соединить их концы прямыми, то получится картинка, которая называется планом скоростей. (На рисунке ).
Свойства плана скоростей.
а) Стороны треугольников на плане скоростей перпендикулярны соответствующим прямым на плоскости тела.
Но на плане скоростей
б) Стороны плана скоростей пропорциональны соответствующим отрезкам прямых на плоскости тела.
то отсюда и следует, что стороны плана скоростей пропорциональны отрезкам прямых на плоскости тела.
Объединив оба свойства, можно сделать вывод, что план скоростей подобен соответствующей фигуре на теле и повёрнут относительно её на 90? по направлению вращения. Эти свойства плана скоростей позволяют определять скорости точек тела графическим способом.
2.2 Мгновенный центр скоростей (МЦС). Примеры определения МЦС
Теорема Эйлера-Шаля доказывает, что любое непоступательное перемещение фигуры в плоскости можно осуществить поворотом вокруг некоторого неподвижного центра. В соответствии с этим легко доказывается, что при плоскопараллельном движении в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нолю. Эту точку называют мгновенным центром скоростей (МЦС). В учебниках эту точку пишут с индексом V, например PV, CV.
При определении положения МЦС скорость любой точки может быть записана:
Из рис. 5 видно, что мгновенный центр скоростей лежит в точке пересечения перпендикуляров, проведенных к скоростям точек, при этом всегда справедливо соотношение
На нижеприведенных рисунках показаны примеры определения положения мгновенного центра скоростей и приведены формулы для расчета скоростей точек.
СV совпадает с точкой В VB=0. Шатун АВ вращается вокруг точки В
3. МЦС лежит в «бесконечности»
В этом случае МЦС находится в «бесконечности», т.е.
Формулы справедливы при отсутствии проскальзывания в точке СV.
2.3 Поступательное движение твердого тела (скорость и ускорение точки)
Поступательным движением твердого тела называется такое его движение, при котором прямая, проходящая через любые две точки в этом теле, будет оставаться параллельной своему первоначальному положению во все время движения. Заметим, что при этом траектории точек тела могут быть любыми и иметь форму прямой, окружности, пространственной кривой и т.д.
Примерами поступательного движения служат движения контактной рейки трамвайного пантографа относительно вагона, кабины колеса обозрения в парке относительно земли, ступеней эскалатора относительно пола в метро и т. д.
Свойства поступательного движения:
1) траектории всех точек тела, совершающего поступательное движение, конгруэнтны, т. е. одинаковы, и могут быть получены одна из другой параллельным переносом;
2) скорости всех точек тела одинаковы;
3) ускорения всех точек тела одинаковы.
Дифференцируя левую и правую части приведенного выше векторного соотношения и учитывая, что
Дифференцируя по времени левую и правую части полученного соотношения для скоростей, находим
На основании вышеизложенного можно сделать следующий вывод: чтобы задать движение и определить кинематические характеристики тела, совершающего поступательное движение, достаточно задать движение одной его любой точки (полюса) и найти ее кинематические характеристики.
Как и материальная точка, тело при его поступательном движении будет иметь одну степень свободы при движении по направляющей, задающей траекторию его точкам; две степени свободы в случае движения на плоскости (при постоянном контакте с ней хотя бы одной точкой) и три степени свободы в общем случае движения в пространстве.
2.4 Вращательное движение твердого тела (скорость и ускорение точки)
Вращательным называют такое движение твердого тела, при котором две какие-нибудь точки принадлежащие телу, остаются во все время движения неподвижными. Прямая, проходящая через эти точки, называется осью вращения. Все точки, лежащие на оси так же неподвижны.
Теперь в любой момент времени положение тела будет определяться углом между плоскостями А и В или углом поворота тела, положительным, если вращение происходит против часовой стрелки, и отрицательным в противном случае. Закон вращательного движения
Угол поворота обычно измеряют в радианах.
Если за промежуток времени
тело совершает поворот на угол
то средняя угловая скорость будет численно равна
Угловая скорость твердого тела является первой производной от угла поворота по времени.
Угловую скорость можно изображать вектором. Вектор угловой скорости направляют по оси вращения в ту сторону, откуда вращение видно против хода часовой стрелки.
Угловое ускорение характеризует изменение угловой скорости тела с течением времени.
Если за промежуток времени
угловая скорость получает приращение
то среднее угловое ускорение равно
Угловым ускорением твердого тела в данный момент времени t называется величина, к которой стремится при стремящемся к нулю
Если направление и совпадает, то вращение ускоренное, если противоположно, то замедленное.
то вращение будет равномерным.
Найдем его закон. Так как
то, интегрируя при начальных условиях t = 0, = 0, получаем
Это и есть закон равномерного вращения.
В технике вращение характеризуют оборотами в минуту n [об/мин]. Угловая скорость и обороты в минуту n связаны следующим соотношением:
Если угловое ускорение тела все время остается постоянным, то вращение называют равнопеременным (= const).
Найдем закон вращения, если в начальный момент t = 0, = 0 и :
Подставляем вместо правую часть, разделяем переменные и, вновь интегрируя, имеем
Это закон равнопеременного вращения.
2.5 Передаточные механизмы
Передаточные механизмы передают движение от одного тела к другому. Параметры движения тел определяются с учетом параметров точек соприкосновения (зацепления) этих тел. На рисунке 14 (а, б, в, г) приведены различные схемы передачи движения от одного тела к другому.
На рисунках 14,а и 14,б зависимости угловых скоростей колес определяются из соотношения Vc=щ1? r1=щ2? r2, т.е.
На рисунке 14,а (внешнее зацепление) колёса вращаются в противоположные стороны, на рисунке 14,б (внутреннее зацепление) колеса вращаются в одну сторону.
VA=щ1? r1=VB=щ2?r2, щ1/щ2=r2/r1.
На рисунке 14,г поступательное движение стержня обеспечивает вращение колеса:
На рисунке 15 изображена фрикционная передача: колесо 1, прижимаясь к торцу колеса 2 в точке C, обеспечивает его вращение вокруг вертикальной оси.
3. Динамика
3.1 Сила инерции материальной точки
В круговом движении точки центробежная сила инерции направлена по радиусу от центра (фиг. 48) и равна
Qц=mRщ2=0,00112GRn2 (G в кг, R в м, n в об/мин.)
В равномерном движении точки имеется только центробежная сила инерции. Сила инерции тела равна массе тела, умноженной на ускорение центра тяжести тела:
Сила инерции тела = Масса *
Ускорение центра тяжести. Сила инерции вращающегося тела передается на подшипники, вызывая дополнительную нагрузку на них.
3.2 Принцип Даламбера
Принцип Даламбера для материальной точки.
Пусть материальная точка массы m совершает несвободное движение относительно инерциальной системы координат Oxyz под действием активной силы Fa и реакции связи R (рис. 17).
численно равный произведению массы точки на ее ускорение и направленный противоположно вектору ускорения. Вектор Fu имеет размерность силы и называется силой инерции (даламберовой) материальной точки.
Принцип Даламбера для материальной точки сводится к следующему утверждению: если к силам, действующим на материальную точку, условно присоединить силу инерции точки, то получим уравновешенную систему сил, т. е.
Вспоминая из статики условие равновесия сходящихся сил, принцип Даламбера можем записать также в следующей форме:
Метод кинетостатики особенно удобен при решении первой задачи динамики.
Пример. Из наивысшей точки гладкого сферического купола радиуса R соскальзывает материальная точка М массы m с пренебрежимо малой начальной скоростью (рис. 18). Определить, в каком месте точка сойдет с купола.
Добавляя эти силы к фактически действующим на точку активной силе mg и реакции купола N, составляем уравнение кинетостатики
Проектируя это векторное уравнение на направления касательной и главной нормали, получаем два уравнения кинетостатики в скалярной форме:
Из второго уравнения находим
Реакция N окончательно найдется после того, как будет определена величина v и подставлена в это выражение.
Для определения v служит первое уравнение, которое является дифференциальным уравнением и требует интегрирования. Однако можно избежать интегрирования, если воспользоваться теоремой об изменении кинетической энергии. Применяя эту теорему для точки М на участке траектории и учитывая, что
(работу совершает только сила тяжести), получаем:
В момент отделения от купола реакция N равна нулю. Следовательно, точка сойдет с купола при
3.3 Приведение сил инерции точек твердого тела к простейшему виду
При поступательном движении силы инерции твердого тела приводятся до одной равнодействующей, проходящей через центр масс тела, и равной по модулю произведению массы тела на модуль ускорения его центра масс и направленной противоположно этому ускорению.
Вращения вокруг центра масс нет, поэтому момент силы инерции равен нулю.
Вращательное движение тела вокруг оси, проходящей через центр масс тела.
Если тело вращается вокруг неподвижной оси проходящей через центр масс тела, то силы инерции приводятся к одной паре сил, лежащей в плоскости перпендикулярной оси вращения.
Поскольку центр масс не движется, главный вектор сил инерции равен нулю.
При плоском движении тела система сил инерции приводится к силе, приложенной в центре масс тела и паре сил. Направление момента силы инерции противоположен угловому ускорению тела.
Размещено на Allbest.ru
Подобные документы
Поступательное, вращательное и сферическое движение твердого тела. Определение скоростей, ускорения его точек. Разложение движения плоской фигуры на поступательное и вращательное. Мгновенный центр скоростей. Общий случай движения свободного твердого тела.
презентация [954,1 K], добавлен 23.09.2013
Обзор разделов классической механики. Кинематические уравнения движения материальной точки. Проекция вектора скорости на оси координат. Нормальное и тангенциальное ускорение. Кинематика твердого тела. Поступательное и вращательное движение твердого тела.
презентация [8,5 M], добавлен 13.02.2016
Аксиомы статики. Моменты системы сил относительно точки и оси. Трение сцепления и скольжения. Предмет кинематики. Способы задания движения точки. Нормальное и касательное ускорение. Поступательное и вращательное движение тела. Мгновенный центр скоростей.
шпаргалка [1,5 M], добавлен 02.12.2014
Решение задачи на определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях. Определение кинетической энергии системы, работы сил, скорости в конечный момент времени. Кинематический анализ многозвенного механизма.
контрольная работа [998,2 K], добавлен 23.11.2009
Вывод формулы для нормального и тангенциального ускорения при движении материальной точки и твердого тела. Кинематические и динамические характеристики вращательного движения. Закон сохранения импульса и момента импульса. Движение в центральном поле.
реферат [716,3 K], добавлен 30.10.2014
Кинетическая энергия вращения твердого тела и момент инерции тела относительно нецентральной оси. Основной закон динамики вращения твердого тела. Вычисление моментов инерции некоторых тел правильной формы. Главные оси и главные моменты инерции.
реферат [287,6 K], добавлен 18.07.2013
Вычисление скорости, ускорения, радиуса кривизны траектории по уравнениям движения точки. Расчет передаточных чисел передач, угловых скоростей и ускорений звеньев вала электродвигателя. Кинематический анализ внецентренного кривошипно-ползунного механизма.
контрольная работа [995,0 K], добавлен 30.06.2012



