Ползун (механич.)


Крейцкопф (нем. Kreuzkopf ), ползун — деталь кривошипно-ползунного механизма, совершающая возвратно-поступательное движение по неподвижным направляющим.
Назначение
Крейцкопф предназначен для соединения поршня и шатуна в крейцкопфном кривошипно-шатунном механизме. При таком сочленении поршень жёстко связан с крейцкопфом с помощью штока. Такое сочленение позволяет разгрузить поршень от нормальной силы, так как её действие в таком случае переносится на крейцкопф. Такая схема соединения позволяет создать вторую рабочую полость в цилиндре под поршнем. При этом шток проходит через сальник в нижней крышке цилиндра, который обеспечивает необходимую герметичность.
Смотреть что такое «Ползун (механич.)» в других словарях:
Ползун (механич.) — Ползун, крейцкопф, деталь, совершающая возвратно поступательное движение в прямолинейных направляющих или (реже) качательное движение в дуговых направляющих. П. является звеном кривошипно ползунных, кулисных и некоторых др. механизмов. В… … Большая советская энциклопедия
Пресс (механич.) — Пресс (франц. presse, от лат. Presso давлю, жму), машина статического (неударного) действия для обработки материалов давлением. П. широко применяют в различных отраслях промышленности для обработки металлов, пластических масс, резины, с. х. и… … Большая советская энциклопедия
ползун
Смотреть что такое «ползун» в других словарях:
ползун — задвижка, плунжер; анабас, ползушка, ползунок, крейцкопф, ребенок Словарь русских синонимов. ползун сущ., кол во синонимов: 9 • анабас (4) • … Словарь синонимов
ПОЛЗУН — (крейцкопф) деталь кривошипно ползунного механизма, совершающая возвратно поступательное движение по неподвижным направляющим … Большой Энциклопедический словарь
ПОЛЗУН — ПОЛЗУН, ползуна, муж. 1. Тот, кто ползает (см. ползти в 1 и 2 знач.; разг.). 2. В машинах и двигателях часть, скользящая при работе взад и вперед по какой нибудь поверхности или плоскости (тех.). Толковый словарь Ушакова. Д.Н. Ушаков. 1935 1940 … Толковый словарь Ушакова
ПОЛЗУН — ПОЛЗУН, а, муж. 1. Тот, кто ползёт или ползает. Малыш п. (ползунок). Рыба п. (способная передвигаться на плавниках по суше). 2. Деталь машины, скользящая взад и вперёд по чему н. в прямолинейном направлении (спец.). | жен. ползунья, и, род. мн.… … Толковый словарь Ожегова
ПОЛЗУН — (Slide block) деталь механизма, скользящая по какой нибудь направляющей поверхности, чаще по плоскости (напр. крейцкопф). Самойлов К. И. Морской словарь. М. Л.: Государственное Военно морское Издательство НКВМФ Союза ССР, 1941 … Морской словарь
ПОЛЗУН — лыска, повреждение поверхности катания бандажа или безбандажного колеса, выражающееся в появлении на круговой поверхности катания плоского места, вызванного сильным торможением, при к ром колеса заклиниваются, т. е. перестают вращаться и ползут… … Технический железнодорожный словарь
ползун — Звено рычажного механизма, образующее поступательную пару со стойкой. [Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно технической терминологии. 1984 г.] Тематики теория механизмов и машин… … Справочник технического переводчика
ПОЛЗУН — деталь кривошипно рычажного механизма, образующая поступательную пару со стойкой и совершающая возвратно поступательное движение по неподвижным направляющим … Большая политехническая энциклопедия
ползун — 3 13 ползун: Главный, совершающий возвратно поступательное движение элемент высечных ножниц, на котором крепится инструмент. Источник: ГОСТ 12.2.118 2006: Ножницы. Требования безопасности оригинал документа 3.9 ползун: Главный совершающий… … Словарь-справочник терминов нормативно-технической документации
Ползун — В Викисловаре есть статья «ползун» Ползун то, что ползёт. Ползун стёсанность колеса рельсового транспорта, приводящая к биению Ползун крейцкопф, деталь кривошипно ползунного механизма, совершающая возвратно поступательное движение Рыба ползун … Википедия
ползун — а; м. 1. Разг. Тот, кто ползёт или ползает. Малыш ползун (ползунок). Рыба ползун (способная передвигаться на плавниках по суше). 2. Техн. Деталь механизма, скользящая взад и вперёд по чему л. в прямолинейном направлении. Осмотреть ползуны. ◁… … Энциклопедический словарь
iSopromat.ru

Рассмотрим определения понятий детали и звена механизма:
Деталь
Деталь – составная часть механического устройства, выполненная без применения сборочных операций (например: болт, гайка, вал, станина станка, полученная литьем и т.д.).
Деталь является элементарной составной частью машины. Типы деталей, их расчет, выбор формы, создание рабочего чертежа подробно рассматриваются в курсе «Детали машин и основы конструирования». В теории механизмов и машин в качестве элементарной составной части рассматривается более сложная конструкция – звено.
Звено
Звено – это деталь или группа деталей, представляющих с кинематической точки зрения единое целое (т.е. группа деталей, жестко соединенных между собой и движущихся как единое твердое тело).
На рисунке 1 изображен шатун поршневого двигателя (или поршневого компрессора). Он состоит из относительно большого количества деталей (непосредственно сам шатун, шатунная крышка для присоединения его к коленчатому валу, запрессованные в отверстия бронзовые втулки для уменьшения трения, болты и гайки для соединения шатунной крышки с шатуном – рисунок 1а), но в собранном виде представляет собой жесткую конструкцию, неизменяемую в процессе работы машины (рисунок 1б). Таким образом, шатун является отдельным звеном механизма.
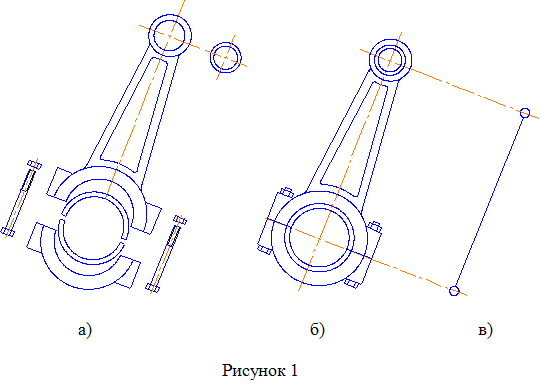
В реальном механизме звенья часто имеют довольно сложную конфигурацию (конструкцию), поэтому при анализе и синтезе механизмов используют кинематические схемы. Кинематическая схема – это условное изображение звеньев и всего механизма, выполненное строго в масштабе.
При составлении кинематической схемы выделяются основные элементы звена, которыми оно присоединяется к другим звеньям механизма (отверстия, направляющие и т.д.). Эти элементы изображаются условно (например, отверстии – в виде окружностей произвольного радиуса) и соединяются жесткими стержнями. На рисунке 1в представлена кинематическая схема шатуна, изображенного на рисунке 1б.
Под масштабом в теории механизмов и машин понимают количество истинных единиц измеряемой величины, заключенное в одном миллиметре чертежа. Другими словами – это «цена» одного миллиметра. Такое понимание масштаба (иногда его называют масштабным коэффициентом) очень удобно при анализе работы механизма, т.к. является универсальным и позволяет представлять в виде отрезка любую физическую величину, что очень важно при использовании графических и графоаналитических методов исследования.
Масштаб в такой интерпретации является размерной величиной. Обычно истинная величина представляется без черты над ее обозначением, а обозначение с чертой (аналогично обозначению вектора) представляет собой отрезок на чертеже в миллиметрах, изображающий данную величину.
AB – истинный размер звена в метрах;
__
AB – отрезок, изображающий звено АВ на кинематической схеме в миллиметрах,
Тогда масштаб длин (масштаб данной кинематической схемы механизма)
Примечание: масштаб обычно обозначают латинской буквой K или греческой буквой μ.
Аналогично можно представлять в виде отрезков любые величины (перемещения звеньев, скорости, ускорения, время, силы и т.д.) на планах, диаграммах, различных графиках и др.
В зависимости от характера движения звенья могут иметь собственные названия. Ниже приведены некоторые из них:
На кинематической схеме стойка обычно изображается в виде отдельных фрагментов в тех местах, где к ней присоединяются другие звенья механизма, что резко упрощает эту схему.
Примечание: в процессе изложения курса могут встретиться другие названия звеньев, которые будут введены по мере необходимости.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Кулисный механизм: виды, схема, принцип работы
Кулисная пара – это разновидность рычажных механизмов. Она преобразует вращательное движение в возвратно-поступательное или наоборот. При этом вращающееся звено может совершать не полный оборот. Тогда его называют качательным. Механизм состоит их двух основных звеньев- кулисы и ползуна. Один конец кулисы закреплен на неподвижной оси.

Кулисный механизм
Кулиса представляет собой прямой или изогнутый рычаг с прорезью, в которой скользит конец другого рычага. Он движется относительно кулисы прямолинейно. Кулисные механизмы бывают качающиеся, вращающиеся и прямые.
Кривошипно-кулисные механизмы способны обеспечивать высокую скорость линейного перемещения исполнительных органов. Характерным примером механизма кулисного типа служит система управления клапанами в автомобильных моторах, устройство управления реверсом парового двигателя и т. д.
Используются кулисные пары в металлообрабатывающих и деревообрабатывающих станках, там, где рабочий орган должен совершать многократные линейные перемещения с возвратным ходом.

Еще одна область применения- аналоговые вычислительные устройства, там кулисные пары помогают определять значения синусов либо тангенсов заданных углов.
Виды кулисных механизмов
В исходя из типа подвижного звена рычажной схемы в установках и подвижных узлах используются следующие виды кулисных пар:

Реже находит применение в транспортных средствах и некоторых измерительных приборах стоящий несколько особняком прямолинейно- направляющий или конхоидальный механизм.
Конструктивные особенности
Устройство является одним из подвидов кривошипно-шатунного механизма. Большинство кулисных пар построены по четырехзвенной кинематической схеме.
Третье звено определяет тип механизма: двухкулисный, ползунный, коромысловый или кривошипный.
Схема содержит как минимум две неподвижные оси и от одной до двух подвижных осей.
В середине кулисы располагается прорезь, по которой перемещается подвижная ось. К ней шарнирно закреплен конец (или другая часть) ползуна, коромысла или второй кулисы.
В зависимости от соотношения длин в каждый момент исполнительный орган может описывать как простые траектории (линейные, круговые или часть окружности), таки сложные в виде многоугольников или замкнутых кривых. Вид траектории определяется законом движения кинематической пары – функцией координат исполнительного органа от угла поворота оси, положения ползуна или от времени.
Принцип действия механизма
Принцип действия основывается на базовых законах прикладной механики, кинематики и статики, описывающий взаимодействие системы рычагов, имеющих как подвижные, так и неподвижные оси. Элементы системы полагаются абсолютно жесткими, но обладающими конечными размерами и массой. Исходя из распределения масс рассчитывается динамика кулисного механизма, строятся диаграммы ускорений, скоростей, перемещений, рассчитываются эпюры нагрузок и моментов инерции элементов.
Силы считаются приложенными к бесконечно малым точкам.
Рычажное устройство, имеющее два подвижных элемента (кулиса и кулисный камень) называют кинематической парой, в данном случае кулисной.
Чаще всего встречаются плоские схемы из четырех звеньев. Исходя из вида третьего звена рычажного механизма, различают кривошипные, коромысловые, двухкулисные и ползунные механизмы. Каждый из них обладает собственным способом преобразования вида движения, но все они используют единый прицеп действия- линейное или вращательное перемещение рычагов под действием приложенных сил.
Траектория движения каждой точки кривошипно кулисного механизма определяется соотношением длин плеч и рабочими радиусами элементов схемы.
Вращающееся или качающееся звено системы рычагов оказывает воздействие на поступательно движущееся звено в точке их сочленения. Оно начинает перемещение в направляющих, оставляющих этому звену только одну степень свободы, и движется до тех пор, пока не займет крайнее положение. Это положение соответствует либо первому фазовому углу вращающегося звена, либо крайнему угловому положению качающегося. После этого при продолжении вращения или качании в обратную сторону прямолинейно движущееся звено начинает перемещение в обратном направлении. Обратный ход продолжается до тех пор, пока не будет достигнуто крайнее положение, соответствующее либо полному обороту вращающегося звена, либо второй граничной позиции качающегося.
После этого рабочий цикл повторяется.
Если кулисный механизм, наоборот, преобразует поступательное движение во вращательное, взаимодействие осуществляется в обратном порядке. Усилие, передаваемое через сочленение от ползуна, прикладывается в стороне от оси вращения звена, обладающего возможностью поворота. Возникает крутящий момент, и вращающееся звено начинает поворачиваться.
Преимущества и недостатки кулисного механизма
Основным достоинством устройства служит его способность обеспечить высокую линейную скорость возвратного движения. Это свойство нашло применение в станках и механизмах, которые по условиям работы имеют холостой возвратный ход. Это прежде всего долбежные и строгальные станки. Применение кулисно-рычажного механизма привода позволяет существенно повысить общую эффективность использования установки, сократив время на непроизводительные такты.
Преимуществом двухкулисных систем, применяемых в аналоговых вычислительных устройствах, служит высокая надежность и стабильность их работы. Они отличаются высокой устойчивостью к таким факторам внешней среды, ка вибрации и электромагнитные импульсы. Это обуславливало их широкое применение в системах сопровождения целей и наведения вооружений.
Недостатком данной кинематической схемы является малые передаваемые усилия. Кривошипно-шатунная схема позволяет предавать в несколько раз большую мощность.

Недостатком аналоговых вычислительных устройств является исключительная сложность или даже невозможность их перепрограммирования. Они могут вычислять только одну, наперед заданную функцию. Для вычислительных систем общего назначения это неприемлемо. С развитием программно- аппаратных средств цифровой техники, повышением ее надежности и устойчивости к воздействиям внешней среды такие вычислительные системы сохраняются в нишах узкоспециальных применений.
Проектирование (производство) кулисного механизма
Несмотря на кажущуюся простоту устройств кулисного механизма, для того, чтобы он работал эффективно, требуется провести большую работу по его расчету и проектированию. При этом рассматриваются следующие основные аспекты:
Учитывая сложность взаимовлияния этих аспектов друг на друга, расчет кривошипно-кулисного механизма представляет из себя многоступенчатую итеративную задачу.

В ходе проектирования проводят следующие виды расчета и моделирования:
Обычно проектирование и расчет разбивается на следующие этапы:

Расчет и проектирование кулисного механизма долгое время представлял собой весьма трудоемкий процесс, требовавший большого сосредоточения и внимательности от конструктора. В последнее время развитие средств вычислительной техники и программных продуктов семейства CAD-CAE существенно облегчил все рутинные операции по расчету. Конструктору достаточно выбрать подходящую кинематическую пару или звено из поставляемых производителем программ библиотек и задать их параметры на трехмерной модели. Существуют модули, на которых достаточно отобразить графически закон движения, и система сама подберет и предложит на выбор несколько вариантов кинематической его реализации.
Область применения
Кулисные механизмы находят применение в тех устройствах и установках, где требуется преобразовать вращение или качание в продольно- поступательное перемещение или сделать обратное преобразование.
Наиболее широко они используются в таких металлообрабатывающих станках, как строгальные и долбежные. Важное преимущество кулисно-рычажного механизма, заключается в его способности обеспечивать высокую скорость движения на обратном ходе. Это дает возможность существенно повысить общую производительность оборудование и его энергоэффективность, сократив время, затрачиваемое на непроизводительные, холостые движения рабочих органов. Здесь же находит применение кулисный механизм с регулируемой длиной ползуна. Это позволяет наилучшим образом настаивать кинематическую схему исходя из длины заготовки.
Механизм конхоидального типа применяется в легком колесном транспорте, приводимом в действие ножной мускульной силой человека- так называемом шагоходе. Человек, управляющий машиной, имитируя шаги, поочередно нажимает на педали механизма, закрепленные на оси с одного конца. Кулисная пара преобразует качательное движение во вращение приводного вала, передаваемое далее цепным или карданным приводом на ведущее колесо.
В аналоговых вычислительных машинах широко применялись так называемые синусные и тангенсные кулисные механизмы. Для визуализации различных функции в них применяются ползунные и двухкулисные схемы. Такие механизмы использовались в том числе в системах сопровождения целей и наведения вооружений. Их отличительной чертой являлась исключительная надежность и устойчивость к неблагоприятным воздействиям внешней среды (особенно- электромагнитных импульсов) на фоне достаточной для решения поставленных задач точности. С развитием программных и аппаратных средств цифровой техники область применения механических аналоговых вычислителей сильно сократилась.
Еще одна важная сфера применения кулисных пар- устройства, в которых требуется обеспечить равенство угловых скоростей кулис при сохранении угла между ними. Муфты, в которых допускается неполная соосность валов, системы питания автомобильных двигателей, устройство реверса на паровом двигателе.
Кривошипно-ползунный механизм: устройство, принцип работы, применение
Кривошипно-ползунный механизм (КПМ) представляет собой частный случай рычажного устройства с четырьмя звеньями. Вращающаяся на валу часть — кривошип — шарнирно соединена с совершающей продольные движения частью- шатуном. Он зафиксирован в направляющих, оставляющих одну степень свободы для линейного движения. Устройство служит для преобразования вращения кривошипного звена в линейное перемещение ползуна. Механизм обратим, то есть и линейное движение ползуна может быть превращено во вращение вала кривошипа. Он широко используется в технике — в автомобильных моторах и паровых машинах, технологических установках и измерительных приборах.

Принцип действия кривошипно-ползунного механизма
Для прямой схемы кривошипно-ползунного механизма принцип работы состоит в следующем:

В случае обратной схемы работы принцип таков:
При построении кривошипно- ползунного механизма, его закона движения, статических и кинематических схем они должны удовлетворять требованиям по ГОСТ 2144-76.
Кинематический анализ кривошипно-ползунного механизма
Целью кинематического анализа КПМ является проектирование взаимных положений, траекторий передвижения, скоростей и ускорений всех его деталей. Для этого реальные физические тела заменяются моделями- рычагами и поверхностями, имеющими абсолютную жесткость, шарнирами и поверхностями с нулевым трением. Масса детали полагается сконцентрированной в условной точке- центре масс, как правило, совпадающей с геометрическим центром моделируемой детали.
Кинематическое моделирование разбивается на следующие основные этапы:
При построении плана скоростей руководствуются следующими рекомендациями:
При построении плана скоростей возникает возможность стоить перпендикуляры и касательные к линии перемещения какой-либо точки кривошипно-ползунного механизма без изображения самой траектории.
Поскольку ускорение является производной от скорости, то векторные изображения ускорений для каждой точки перпендикулярны соответствующим тем же точкам векторам, изображенными на плане скоростей.

В ходе кинематического моделирования проводится также анализ на наличие избыточных связей в кривошипно-ползунном механизме. Под ними понимают связи, которые не добавляют степеней свободы и могут быть исключены из схемы без потери функциональности. Однако к удалению таких связей следует подходить осторожно. Например, дополнительные подшипники или опоры направляющих могут быть необходимы в реальном механизме исходя их больших величин перемещения во время рабочего хода. без них будет невозможно удовлетворить проектные требования по жесткости, прочности, температурной стойкости и т. д.
Статическое уравновешивание кривошипно-ползунного механизма
Во время перемещения звеньев механизма с изменяющимися скоростями (ускоренного движения) в них возникают инерционные силы и моменты. Их называют динамическими нагрузками. Такие нагрузки приводят к появлению вибраций, колеблющиеся детали излучают свои колебания в воздух, вызывая воздушный шум.
Динамические нагрузки приводят также к многократным деформациям деталей, их повышенному износу, накоплению усталости материала и преждевременному разрушению.
Шум и вибрация оказывают также негативное влияние на людей и точные механизмы, находящиеся рядом с источником. И, наконец, на возбуждение колебаний и излучение шума тратится энергия, это снижает КПД кривошипно-ползунного механизма.
Причины возникновения вибрации делятся на:
Виброактивность делится на
Для устранения причин возникновения вибрации проводят статическое уравновешивание кривошипно-ползунного механизма. Механизм должен находиться в равновесии в состоянии покоя, при этом силы трения полагаются нулевыми.
Для этого вычисляют массы всех звеньев и строят график сил, действующих на них в состоянии покоя, прежде всего сил тяжести. Массы звеньев должны быть уравновешены с учетом длины рычагов (расстояния от центра вращения).
В ходе статического уравновешивания массы звеньев полагаются сосредоточенными в геометрическом центре звена.
Если общий центр масс системы совершает ускоренное движение, механизм считают неуравновешенным. Цель процедуры — достижение нулевого значения ускорения центра масс. Для этого к движущимся частям добавляют уравновешивающие массы, сводящие ускорение к нулю.
После статического уравновешивания наступает этап динамического уравновешивания кривошипно-ползунного механизма. При этом расчеты ведутся уже с учетом реальной пространственной конфигурации деталей.
В ходе производства реального изделия из-за дефектов материала, погрешностей отливки, механообработки и сборки возникают дополнительные разбалансировки звеньев. Для их устранения применяется балансировка кривошипно-ползунного механизма. Она заключается в:
Цикл операций повторяется до тех пор, пока подвижные части не будут удовлетворительно уравновешены.
Построение КПМ
Построение эффективно работающих кривошипно- ползунных устройств, несмотря кажущуюся простоту их конструкции, требует большой расчетной и конструкторской работы.
В ее ходе учитывают такие моменты, как:
Поскольку перечисленные аспекты взаимосвязаны и влияют друг на друга, проектирование ползунного четырехзвенного механизма представляет собой многоэтапный итеративный процесс. Зачатую конструктору приходится возвращаться на более ранний этап проектирования рычажного механизма и уточнять параметры схемы по результатам расчетов на более поздних стадиях процесса.
Иногда даже приходится менять вид кривошипно- ползунного механизма. В высокооборотных дизелях требуется снизить скорость движения поршня на некоторых фазах рабочего цикла. Как правило, это требуется при прохождении верхней части цилиндра, чтобы обеспечить более полное сгорание топливной смеси. Для этого применяют дезаксиальную схему кривошипно-ползунного устройства. В ней оси цилиндров расположены со смещением смещена относительно оси коленвала на некоторое расстояние по ходу вращения.
Для лучшего уравновешивания многоцилиндровых V-образных двигателей используют схему двигателя с прицепным шатуном.
В ней прицепного шатун бокового цилиндра сопряжен с шатуном главного цилиндра. Это позволяет снизить вес, размеры и момент инерции части подвижных звеньев.

Построение включает в себя такие расчетно- модельные процедуры, как:
Обязательным этапом является проверка на соответствие нормам безопасности и охраны труда.
Традиционный расчет и построение такого сложного механизма, как кривошипный, представляет собой трудоемкий процесс, требующий от конструктора внимательности и достаточного опыта. Современные элементы программных продуктов семейства CAD — CAE позволяют избавиться от большей части рутинных и однообразных ручных операций, графических построений и расчетов. Конструктору достаточно выбрать из библиотеки трехмерную модель того или иного типа кривошипно- ползунной пары и провести параметрическое моделирование, задав необходимые размеры. Модуль графической симуляции проведет и статическое уравновешивание, и кинематический расчет, и выдаст рекомендации по оптимизации звеньев.
Область применения
Кривошипно-ползунные механизмы впервые стали применять в античности, на римских пильных мельницах. Там вращение колеса, приводимого в действие силой падающей воды, преобразовывалась в возвратно-поступательное движение полотна пилы.
В средние века конструкция была незначительно улучшена. Настоящий расцвет кривошипно-ползунные пары пережили в эпоху паровых машин. Детали стали производить из чугуна и стали, возросла их прочность и надежность. Учены стали разрабатывать методы расчета таких устройств.
В наши дни самым широким полем применения являются поршневые бензиновые и дизельные двигатели. Они используются в каждом автомобиле, тепловозе, большинстве судов, винтовых самолетах и вертолетах. В крупных судовых дизелях применяют как обычную, так и дезаксиальную схему.
Еще одна область использования-поршневые компрессоры для производства сжатого воздуха и других газов. В них используется обратная схема действия кривошипно-шатунной пары.


Такая же схема применяется и в конструкции горизонтально-ковочных установок.
Используются кривошипно-шатунные пары и в разнообразных гидравлических и пневматических инструментах и станках.



