Прямоугольная система координат на плоскости и в пространстве
При введении системы координат на плоскости или в трехмерном пространстве появляется уникальная возможность описания геометрических фигур и их свойств при помощи уравнений и неравенств. Это имеет иное название – методы алгебры.
Данная статья поможет разобраться с заданием прямоугольной декартовой системой координат и с определением координат точек. Более наглядное и подробное изображение имеется на графических иллюстрациях.
Прямоугольная декартова система координат на плоскости
Изображение прямоугольной системы координат на плоскости.
Оси абсцисс и ординат имеют одинаковую единицу изменения и масштаб, что показано в виде штрихе в начале координатных осей. Стандартное направление О х слева направо, а O y – снизу вверх. Иногда используется альтернативный поворот под необходимым углом.
Прямоугольная система координат получила название декартовой в честь ее первооткрывателя Рене Декарта. Часто можно встретить название как прямоугольная декартовая система координат.
Прямоугольная система координат в трехмерном пространстве
По направлению координатных осей делят на правую и левую прямоугольные системы координат трехмерного пространства.
Аналогично образуется левая система координат. Обе системы совместить невозможно, так как соответствующие оси не совпадут.
Координаты точки в декартовой системе координат на плоскости
Имеющееся число x M называют координатой точки М на заданной координатной прямой.
Координаты точки в прямоугольной системе координат в трехмерном пространстве
Системы координат. Системы отсчета
Все механические процессы происходят в пространстве и времени. Это находит отражение в любом механическом законе.
Положение тела в пространстве может быть определено только по отношению к другим телам. Тело отсчета – тело (система неподвижных тел), которое служит для определения положения интересующего нас тела.
Кроме тела отсчета нужна система, которая обеспечивала бы «адреса» других тел. С этой целью вводится система координат. Система координат позволяет определить положение тела в пространстве. Но нужна еще совокупность тела отсчета, связанных с ним координат и синхронизирующих часов – это система отсчета.
Заметим, что удачный выбор системы координат существенно облегчает решение задачи. Рассмотрим основные типы систем координат:
 1. Прямоугольная Декартова:
1. Прямоугольная Декартова:
2. Цилиндрическая система координат:

Задание: Найти координаты точки (1,1,1) в цилиндрической системе координат.
3. Сферическая система координат:
Задание: Найти координаты точки (1,1,1) в сферической системе координат.
Формулы, связывающие координаты точки в одной системе отсчета с координатами в другой системе, называют формулами преобразования координат.
Скалярные, векторные величины. Действия над ними. Вычисление компонент вектора. Орты.
Для удобства координаты точки в любой системе координат будем обозначать одной буквой:



Вектор – направленный отрезок прямой, у которого один конец называется началом, а другой конец – концом. Модуль, направление, точка приложения, нулевой вектор.
Два вектора равны, если они имеют одинаковые модули и направление.
Противоположным вектору  называют вектор
называют вектор  .
.
Действия над векторами:
a. Правило треугольника  ;
;
b. Правило прямоугольника;
Если при действии над векторами результат не изменяется при перестановке векторов, то говорят, что вектора обладают свойством коммутативности относительно этого действия.
2. Разность векторов  или
или  ;
;
3. Умножение вектора на число  ;
;
4. Скалярное произведение векторов:
Скалярным произведение векторов называют произведение модулей этих векторов на косинус угла между ними. Т.е. результат скалярного произведения – скаляр.
 .
.
Обладает свойством коммутативности.
Пример:  .
.
5. Векторное произведение:
В результате векторного произведения получается вектор, модуль которого равен произведению модулей перемножающихся векторов на синус угла между ними. Результирующий вектор направлен перпендикулярно плоскости перемножаемых векторов и направлен в сторону движения правого винта, если вращать его от первого вектора ко второму по кратчайшему пути.
Модуль вектора C равен площади параллелограмма, построенного на A и B.
Компоненты векторных величин.


Скалярное и векторное произведение орт:
Скалярные произведения одноименных орт равны 1, разноименных – 0.
Векторное произведение одноименных орт равно 0. Модуль векторного произведения разноименных орт равен 1.
Действия над векторами в координатной форме.
Компонент суммы двух векторов – сумма компонент слагаемых.


Радиус вектор – вектор, проведенный из начала координат в данную точку.
Перемещение и скорость в векторной и координатной формах.
Траектория – линия, вдоль которой движется тело.
Путь – расстояние вдоль траектории.
Перемещение – кратчайшее расстояние.
Вектором мгновенной скорости называют вектор, равный производной радиус-вектора по времени (направлен по касательной).
При прямолинейном движении  .
.
Абсолютное значение скорости (модуль):

 В общем случае при прямолинейном движении
В общем случае при прямолинейном движении
Если  , то через параметры траектории:
, то через параметры траектории: 

Ускорение в векторной и координатной формах.

вектор среднего ускорения (скорость изменения скорости)
Изменение линейной скорости по направлению (меняется только направление).
Вектор ускорения – вторая производная вектора перемещения по времени.
Кинематика вращательной точки. Угловая скорость.


Т – период (время одного оборота).
 — линейная частота.
— линейная частота.
Модуль  равен углу поворота и направлен по оси вращения так, что направление поворота отвечает правилу винта.
равен углу поворота и направлен по оси вращения так, что направление поворота отвечает правилу винта.
 — угловое ускорение.
— угловое ускорение.
a) При равноускоренном движении вектор направлен в ту же сторону что и  .
.
b) При равнозамедленном – в обратную.
Вектора r, v и a называют естественными или полярными векторами.
Вектора  — аксиальными.
— аксиальными.
Аксиальные вектора введены для объяснения физических процессов при вращательном движении. Они, так же как и полярные вектора подчиняются правилу сложения векторов.
Связь между линейными и угловыми величинами.
 , r – радиус-вектор.
, r – радиус-вектор.
По определению векторного произведения  .
.



an=aц – изменение скорости по направлению за единицу времени.

at – изменение скорости по модулю за единицу времени. При равномерном движении at=0.
Преобразование координат и компонент векторов.
Формулы, связывающие координаты точки в одной системе координат с координатами в другой называются преобразование координат.
 | (1) |
Для определения компоненты x умножим скалярно (1) на i:
Тогда (2) запишем для случая ax=0 (поворот):
Пример: Преобразование координат для двухмерного случая.
Значение скалярной величины определяется одним числом.
Значение вектора определяется тремя числами, которые называют компоненты вектора.
Более общее определение вектора:
Вектор – это упорядоченная совокупность трех чисел, зависящих от системы координат и преобразующихся при повороте системы отсчета так же, как преобразуются компоненты вектора.

При параллельном переносе компоненты вектора не изменяются:
Вектор тот же, но системы разные.
 означает в координатной форме равенство компонент.
означает в координатной форме равенство компонент.

Величины, значения которых не изменяются при преобразованиях, называются инвариантами.
Вращение вокруг неподвижной оси.
Для точки mi имеем:

Рассмотрим момент импульса относительно оси 0. Общий момент импульса равен:

 — двойное векторное произведение.
— двойное векторное произведение.





Аналогично преобразуем Nz .
Введем инерциальные коэффициенты или моменты инерции:
 ,
,  ,
,  .
.

Здесь обозначения аналогичные.
Совокупность величин  образует тензор инерции.
образует тензор инерции.
Тензор симметричный, т.е.  и т.д. Таким образом тензор инерции определяется 6 числами.
и т.д. Таким образом тензор инерции определяется 6 числами.
Главные оси тензора инерции.
Симметричный тензор можно представить наглядно в виде эллипсоида, в данном случае эллипсоида инерции.
Тензор (второго ранга) – упорядоченная система 9 чисел, которые связывают два вектора.
Вектор (тензор первого ранга)– упорядоченная система трех чисел, которые преобразуются при изменении системы координат.
Скаляр (тензор нулевого ранга)– число, не изменяющееся при изменении системы координат.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Прямоугольная система координат
Прямоугольная система координат — прямолинейная система координат с взаимно перпендикулярными осями на плоскости или в пространстве. Наиболее простая и поэтому часто используемая система координат. Очень легко и прямо обобщается для пространств любой размерности, что также способствует ее широкому применению.
Содержание
Прямоугольная система координат на плоскости
Прямоугольная система координат на плоскости образуется двумя взаимно перпендикулярными осями координат  и
и  . Оси координат пересекаются в точке
. Оси координат пересекаются в точке  , которая называется началом координат, на каждой оси выбрано положительное направление.
, которая называется началом координат, на каждой оси выбрано положительное направление.
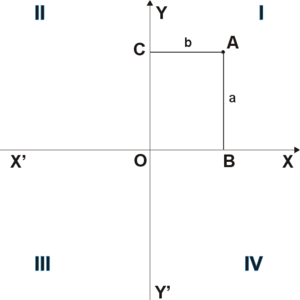

Положение точки  на плоскости определяется двумя координатами
на плоскости определяется двумя координатами  и
и  . Координата равна длине отрезка
. Координата равна длине отрезка  , координата — длине отрезка
, координата — длине отрезка  в выбранных единицах измерения. Отрезки и определяются линиями, проведёнными из точки параллельно осям и соответственно.
в выбранных единицах измерения. Отрезки и определяются линиями, проведёнными из точки параллельно осям и соответственно.
При этом координате приписывается знак минус, если точка  лежит на луче
лежит на луче  (а не на луче
(а не на луче  , как на рисунке). Координате приписывается знак минус, если точка
, как на рисунке). Координате приписывается знак минус, если точка  лежит на луче
лежит на луче  . Таким образом, и являются отрицательными направлениями осей координат (каждая ось координат рассматривается как числовая ось).
. Таким образом, и являются отрицательными направлениями осей координат (каждая ось координат рассматривается как числовая ось).
Координата называется абсциссой точки , координата — ординатой точки .
Символически это записывают так:


или указывают принадлежность координат конкретной точке с помощью индекса:

Прямоугольная система координат в пространстве
Прямоугольная система координат в пространстве (в этом параграфе имеется в виду трехмерное пространство, о более многомерных пространствах — см. ниже) образуется тремя взаимно перпендикулярными осями координат ,  и
и  . Оси координат пересекаются в точке , которая называется началом координат, на каждой оси выбрано положительное направление, указанное стрелками, и единица измерения отрезков на осях. Единицы измерения обычно (не обязательно [2] ) одинаковы для всех осей. — ось абсцисс, — ось ординат, — ось аппликат.
. Оси координат пересекаются в точке , которая называется началом координат, на каждой оси выбрано положительное направление, указанное стрелками, и единица измерения отрезков на осях. Единицы измерения обычно (не обязательно [2] ) одинаковы для всех осей. — ось абсцисс, — ось ординат, — ось аппликат.
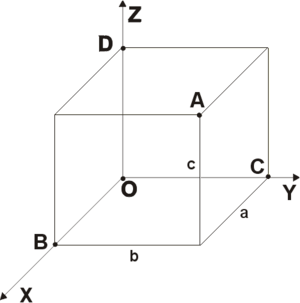
Положение точки в пространстве определяется тремя координатами , и  . Координата равна длине отрезка , координата — длине отрезка , координата — длине отрезка
. Координата равна длине отрезка , координата — длине отрезка , координата — длине отрезка  в выбранных единицах измерения. Отрезки , и определяются плоскостями, проведёнными из точки параллельно плоскостям
в выбранных единицах измерения. Отрезки , и определяются плоскостями, проведёнными из точки параллельно плоскостям  ,
,  и
и  соответственно.
соответственно.
Координата называется абсциссой точки , координата — ординатой точки , координата — аппликатой точки .
Символически это записывают так:


или привязывают запись координат к конкретной точке с помощью индекса:

Каждая ось рассматривается как числовая прямая, т. е. имеет положительное направление, а точкам, лежащим на отрицательном луче приписываются отрицательные значения координаты (расстояние берется со знаком минус). То есть, если бы, например, точка лежала не как на рисунке — на луче , а на его продолжении в обратную сторону от точки (на отрицательной части оси ), то абсцисса точки была бы отрицательной (минус расстоянию ). Аналогично и для двух других осей.
Прямоугольные все системы координат в трехмерном пространстве делятся на два класса — правые (также используются термины положительные, стандартные) и левые. Обычно по умолчанию стараются использовать правые координатные системы, а при их графическом изображении еще и располагать их если можно, в одном из нескольких обычных (традиционных) положений. (На рис. 2 изображена правая координатная система). Правую и левую системы координат невозможно поворотами [3] совместить так, чтобы совпали соответствующие оси (и их направления). Определить, к какому классу относится какая-либо конкретно взятая система координат можно используя правило правой руки, правило винта итп (положительное направление осей выбирают так, чтобы при повороте оси против часовой стрелки на 90° её положительное направление совпало с положительным направлением оси , если этот поворот наблюдать со стороны положительного направления оси ).
Прямоугольная система координат в многомерном пространстве
Прямоугольная система координат может быть использована и в пространстве любой конечной размерности аналогично тому, как это делается для трехмерного пространства. Количество координатных осей при этом равно размерности пространства (в этом параграфе будем обозначать ее n).
Для обозначения координат обычно [4] применяют не разные буквы, а одну и ту же букву с числовым индексом. Чаще всего это:

Для обозначения произвольной i-ой координаты из этого набора используют буквенный индекс:

а нередко обозначение используют и для обозначения всего набора, подразумевая, что индекс пробегает весь набор значений:  .
.
Прямоугольные координаты вектора
Для векторов (направленных отрезков), начало которых не совпадает с началом координат, прямоугольные координаты можно определить одним из двух способов:
2. Вместо этого можно просто вычесть из координат конца вектора (направленного отрезка) координаты его начала.
В прямоугольных координатах очень просто записываются все операции над векторами:


 а отсюда и вычитание и деление:
а отсюда и вычитание и деление: 



(Это верно для любой размерности n и даже, наравне с прямоугольными, для косоугольных координат).

(Только в прямоугольных координатах с единичным масштабом по всем осям).
для любой размерности пространства,
Очевидно, всё это позволяет, если надо, свести все операции над векторами к достаточно простым операциям над числами.
В трёхмерном случае такие орты обычно обозначаются
 ,
,  и
и 
 ,
,  и
и  .
.
Могут также применяться обозначения со стрелками ( ,
,  и
и  или
или  ,
,  и
и  ) или другие в соответствии с обычным способом обозначения векторов в той или иной литературе.
) или другие в соответствии с обычным способом обозначения векторов в той или иной литературе.
При этом в случае правой системы координат действительны следующие формулы с векторными произведениями ортов:
Для более высоких, чем 3, размерностей (или для общего случая, когда размерность может быть любой) обычно для ортов применяют вместо этого обозначения с числовыми индексами, достаточно часто [10] это

Вектор любой размерности раскладывается по базису (координаты служат коэффициентами разложения):


а для ортонормированного базиса координаты еще и очень легко найти через скалярные произведения с ортами:

История
Впервые прямоугольную систему координат ввел Рене Декарт в своей работе «Рассуждение о методе» в 1637 году. Поэтому прямоугольную систему координат называют также — Декартова система координат. Координатный метод описания геометрических объектов положил начало аналитической геометрии. Вклад в развитие координатного метода внес также Пьер Ферма, однако его работы были впервые опубликованы уже после его смерти. Декарт и Ферма применяли координатный метод только на плоскости.
Координатный метод для трёхмерного пространства впервые применил Леонард Эйлер уже в XVIII веке.
Использование ортов восходит, по-видимому, к Гамильтону и Максвеллу.



