Ответы на любые вопросы
Количество установленных датчиков на современных моделях автомобилей зачастую позволяет называть их «компьютерами на колесах». Дабы привести в порядок управление многочисленными электронными системами, была создана CAN-шина. Что это и каковы принципы ее работы, рассмотрим в данной статье.

Историческая справка
Однако постепенно машины все больше опутывались проводами, и в 1970-м году по степени напичканности различными датчиками они соперничали с самолетами. И чем больше приборов размещалось в автомобиле, тем очевиднее становилась необходимость рационализации цепей электропроводки.
Решение проблемы стало возможным с микропроцессорной революцией и проходило в несколько этапов:

CAN-шина: принцип работы
Шина включает в себя лишь пару проводов, подсоединенных к единственному микрочипу. По каждому кабелю передаются несколько сотен сигналов одновременно на различные контроллеры автомобиля. Скорость передачи данных сравнима с широкополосным интернетом. Кроме того, в случае необходимости сигнал будет усилен до необходимого уровня.
Работу технологии можно разбить на несколько этапов:

Что такое CAN-шина в автомобиле?
В современных автомобилях в единую сеть объединены датчики со следующих устройств:

Применение в других отраслях
Легкость и простота технологии «CAN» раскрывают возможности ее применения не только для «железных коней». Шина используется также в таких областях:

Преимущества и недостатки
«КАН-шина» ценится в машиностроении за такие положительные качества:
Несмотря на обилие преимуществ, технология CAN не лишена и ряда слабых сторон:
Компания «Бош» изобрела не только свечу зажигания и топливный фильтр, но и своеобразный «интернет» для датчиков автомобиля под названием CAN-шина. Что это за стандарт в области связывания воедино всех контроллеров в единую нейросеть, стало известно около 30 лет назад.

Видео: как работает can-шина в авто
В данном ролике механик Артур Камалян расскажет, для чего используется can-шина в автомобиле и как к ней подключиться:
Принцип работы и диагностика CAN-шины в автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
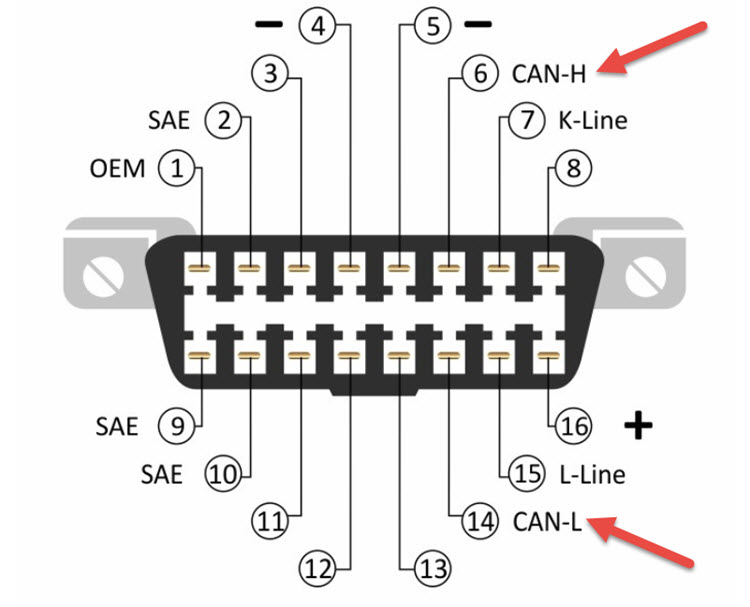
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Что такое CAN-шина в автомобиле (устройство и схема подключения)
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.

Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
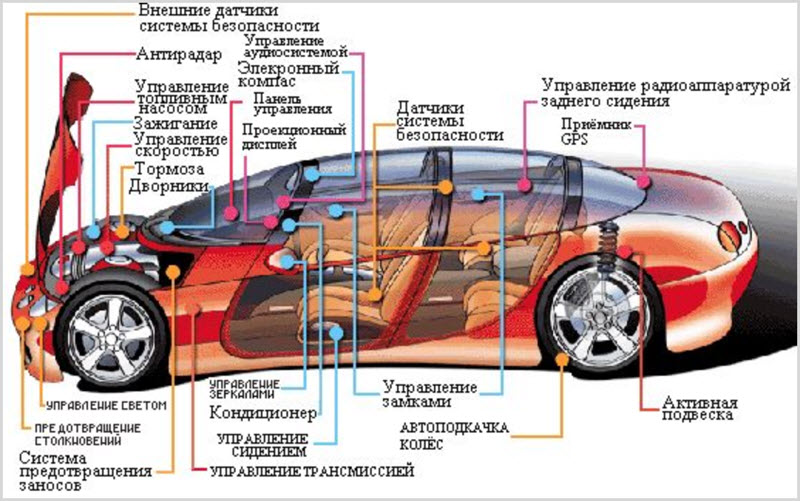
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Схема и место расположения КАН-интерфейса
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.

Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
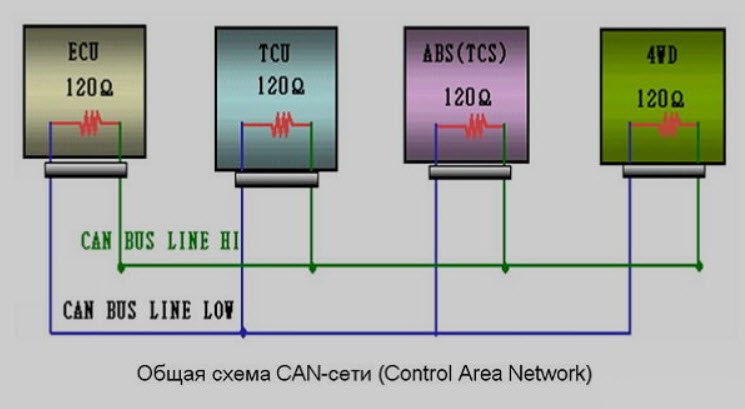
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Can шина принцип работы
Что такое CAN-шина
CAN-шина не имеет никакого отношения к автомобильным покрышкам. Дело в том, что в электронике «шиной» называют систему, по которой передаются данные. Это своего рода река с ручейками, если говорить проще. Что касается аббревиатуры, расшифровывающейся как Controller Area Network (сеть контроллеров), то за ней стоит стандарт промышленной сети для объединения в единую сеть различных исполнительных устройств и датчиков.
Принцип работы CAN-шины
CAN-шина, будучи системой цифровой связи и управления электронными устройствами, позволяет осуществлять обмен информацией между блоками управления. Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
CAN-шина выполняет ряд задач, среди которых ускорение передачи сигналов к разным системам, механизмам и устройствам, уменьшение количества проводов, упрощение подсоединения и работы дополнительных устройств.
Виды CAN-шин
Существует три основных вида.
Силовые обеспечивают синхронизацию и обмен данными между ЭБУ двигателя и основными агрегатами и системами автомобиля – коробкой передач, зажиганием и другими. «Комфортные» нужны, соответственно, для работы опций комфорта. Например, климатической системы, электропривода зеркал и обогрева сидений.
Информационно-командные введены для обмена данными между ЭБУ и такими вспомогательными информационными комплексами как навигационная система.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Схемы CAN-шины
Такая схема подключения устройств называется параллельной схемой подключения. Для достижения максимальной скорости волновые сопротивления блоков должны согласовываться. Если выходит из строя один из блоков (трансмиттеров), этот блок может «завалить» всю шину.
Все сообщения, которые передаются по шине, имеют определенный цифровой код.
Это позволяет производить компьютерную диагностику при помощи опроса блоков по шине.
Диагностическое устройство преобразует цифровые коды и сигнал в абсолютные значения либо коды ошибок.
В спящем режиме CAN-шина полностью не бездействует. Большинство автомобилей используют шину для организации сбора информации дла системы сигнализации и охраны, собирая информацию по шине о датчиках проникновения, контактных устройствах.
Видео «Диагностика авто с помощью CAN шины»
Разновидности функций шин
Существуют разные типы представленного устройства.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.



