Значение слова «статика»

1. Раздел механики, изучающий условия равновесия тел под действием сил.
2. Отсутствие движения, неподвижность. || перен. Отсутствие развития, неизменность в чем-л. Нет никакой статики в нашей жизни. Каждую минуту мы живем в среде сильнейшего, целеустремленного, боевого движения. Макаренко, Литература и общество.
Источник (печатная версия): Словарь русского языка: В 4-х т. / РАН, Ин-т лингвистич. исследований; Под ред. А. П. Евгеньевой. — 4-е изд., стер. — М.: Рус. яз.; Полиграфресурсы, 1999; (электронная версия): Фундаментальная электронная библиотека
СТА’ТИКА, и, мн. нет, ж. [греч. statikē — равновесие]. 1. Отдел теоретической механики, учение об условиях равновесия тел (мех.). 2. Состояние покоя для данного момента; противоп. динамика во 2 знач. (науч.).
Источник: «Толковый словарь русского языка» под редакцией Д. Н. Ушакова (1935-1940); (электронная версия): Фундаментальная электронная библиотека
ста́тика
1. физ. раздел механики, посвящённый изучению условий равновесия материальных тел под воздействием сил ◆ Классическая механика делится на три части — кинематику, динамику, статику.
2. книжн. состояние покоя в какой-либо определенный момент ◆ Описывать явление в статике
3. техн. жарг. то же, что статическое электричество; электрический заряд, накопившийся на каком-то предмете; в отличие от заряда, который поддерживается источником тока ◆ Статикой выбило микросхему.
4. интернет. статичное содержимое HTML-страницы ◆ Статика или динамика: что выбрать с учетом развития сайта?
Делаем Карту слов лучше вместе
 Привет! Меня зовут Лампобот, я компьютерная программа, которая помогает делать Карту слов. Я отлично умею считать, но пока плохо понимаю, как устроен ваш мир. Помоги мне разобраться!
Привет! Меня зовут Лампобот, я компьютерная программа, которая помогает делать Карту слов. Я отлично умею считать, но пока плохо понимаю, как устроен ваш мир. Помоги мне разобраться!
Спасибо! Я обязательно научусь отличать широко распространённые слова от узкоспециальных.
Насколько понятно значение слова кочанный (прилагательное):
Статика

Содержание
Аксиомы статики
Система сил, приложенная к телу или материальной точке, называется уравновешенной или эквивалентной нулю, если тело под действием этой системы находится в состоянии покоя или движения по инерции. [1]
Следствия
Основные понятия
В статике материальные тела считают абсолютно твёрдыми, т.к. изменение размеров тел обычно мало по сравнению с начальными размерами.
Связи
На тело влияют внешние силы, а также другие материальные тела, ограничивающие перемещение данного тела в пространстве. Такие тела называют связями. Сила, с которой связь действует на тело, ограничивая его перемещение, называется реакцией связи. Для записи условия равновесия системы связи убирают, а реакции связей заменяют на равные им силы. [1]
Например, если тело закреплено на шарнире, то шарнир является связью. Реакцией связи при этом будет сила, проходящая через ось шарнира.
Системы сил
Если систему сил, действующих на твёрдое тело, можно заменить на другую систему сил, не изменяя механического состояния тела, то такие системы сил называются эквивалентными.
Для любой системы сил, приложенных к твёрдому телу, можно найти эквивалентную систему сил, состоящую из силы, приложенной в заданной точке (центре приведения), и пары сил. Эта сила называется главным вектором системы сил, а момент, создаваемый парой сил — главным моментом относительно выбранного центра приведения. Главный вектор равен векторной сумме всех сил системы и не зависит от выбранного центра приведения. Главный момент равен сумме моментов всех сил системы относительно центра приведения.
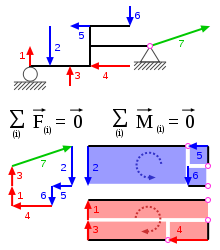

Условие равновесия твёрдого тела

Твёрдое тело находится в равновесии если сумма всех сил, приложенных к данному телу, и их моментов равны нулю. Или, что тоже самое, главный вектор и главный момент системы сил, приложенных к телу, равны нулю. [1]
Условие равновесия системы тел
Из второго закона Ньютона следует, что если геометрическая сумма всех внешних сил, приложенных к телу, равна нулю, то тело находится в состоянии покоя или совершает равномерное прямолинейное движение. В этом случае принято говорить, что силы, приложенные к телу, уравновешивают друг друга. При вычислении равнодействующей все силы, действующие на тело, можно прикладывать к центру масс.
Чтобы невращающееся тело находилось в равновесии, необходимо, чтобы равнодействующая всех сил, приложенных к телу, была равна нулю.
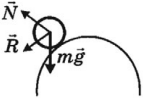
Рисунок 1.14.1. Равновесие твердого тела под действием трех сил. При вычислении равнодействующей все силы приводятся к одной точке C На рис. 1.14.1 дан пример равновесия твердого тела под действием трех сил. Точка пересечения O линий действия сил и не совпадает с точкой приложения силы тяжести (центр масс C), но при равновесии эти точки обязательно находятся на одной вертикали. При вычислении равнодействующей все силы приводятся к одной точке.
Если тело может вращаться относительно некоторой оси, то для его равновесия недостаточно равенства нулю равнодействующей всех сил.
Вращающее действие силы зависит не только от ее величины, но и от расстояния между линией действия силы и осью вращения.
Длина перпендикуляра, проведенного от оси вращения до линии действия силы, называется плечом силы.
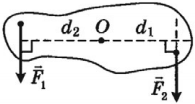
Произведение модуля силы на плечо d называется моментом силы M. Положительными считаются моменты тех сил, которые стремятся повернуть тело против часовой стрелки (рис. 1.14.2).
Правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю:
Связь с другими науками
Статика является базой для науки о сопротивлении материалов.
Основные понятия и определения статики
Определение статики
Статика – это раздел теоретической механики, в котором изучаются условия равновесия материальных тел, находящихся под действием сил, а также методы преобразования сил в эквивалентные системы для упрощения расчетов.
Таким образом, основной задачей статики является установление законов преобразования системы сил в эквивалентные системы с целью упрощения расчетов для решений уравнений равновесия.
Методы статики применяются не только для изучения неподвижных тел, но и для движущихся. Это связано с тем, что если заменить исходную систему сил на эквивалентную, то законы движения тела, или как говорят, кинематическое состояние тела, от этого не изменится. Поэтому методы статики применяются к любым механическим системам, состоящих из точек и твердых тел независимо от того, покоятся они или совершают движение. Эти методы позволяют привести исходную систему сил к эквивалентной с целью упрощения расчетов. Таким образом силы в статике и в теоретической механике являются чисто расчетными величинами. Они могут отличаться от реальных сил, действующих на тела, которые применяются в физике или теории упругости. Все эти методы применяются только к абсолютно твердым телам, пренебрегая возможными деформациями внутри самих тел.
Определения тел
Материальное тело – это некоторое количество вещества, которое заполняет какой-нибудь объем в пространстве и имеет границу.
Заметим, что под это определение подходит и твердое тело, и жидкость, и газ, заключенный в определенный объем.
Материальная точка – это материальное тело, обладающее массой, но размерами которого, в данных условиях, можно пренебречь.
Понятие материальной точки является моделью или упрощением. В одних задачах тело можно считать материальной точкой. В других задачах – это же тело считать точкой нельзя. Например, при изучении движения Земли вокруг Солнца, Землю, и Солнце можно считать материальными точками. Но в задачах, связанных с выведением спутников на орбиту, пренебрегать размерами Земли и строением ее атмосферы уже нельзя.
Твердое тело, или абсолютно твердое тело – это материальное тело, в котором расстояния между любыми точками остаются неизменными, даже при воздействии любых сил.
В статике и теоретической механике, если это особо не оговорено, все тела считаются абсолютно твердыми. Исключение составляют пружины. Но теоретическая механика не изучает состояние их деформации, а лишь использует законы (в частности закон Гука), установленные методами теории упругости и смежных наук.
Механическая система – это совокупность взаимодействующих между собой материальных тел, в котором положение и движение каждого тела зависят от положения и движения других материальных тел этой системы.
Кинематическое состояние
Состояние покоя – это состояние тела, при котором скорости всех его точек, относительно выбранной системы координат, равны нулю. При этом координаты всех точек имеют постоянные, не зависящие от времени значения.
Состояние движения тела – это состояние тела, при котором существуют его точки, которые движутся относительно выбранной системы координат с отличной от нуля скоростью.
Кинематическое состояние тела – это состояние покоя или движения. Два кинематических состояния тела считаются одинаковыми или равными, если закон движения любой точки в первом кинематическом состоянии совпадает с законом движения той же точки во втором состоянии.
Механическое воздействие
Механическое воздействие одного тела на другое – это такое воздействие, в результате которого могут происходить изменения скоростей точек тел без изменения их химического состава. Механическое воздействие может происходить при соприкосновении тел или на расстоянии – в результате действия электромагнитных или гравитационных полей.
Также действие пружины часто рассматривают как действие потенциального поля.
Сила – это мера механического воздействия тел, в результате которого свободное тело получает ускорение относительно инерциальной системы отсчета.
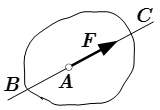
Линия действия силы – это прямая, параллельная вектору силы, проходящая через ее точку приложения.
Связанный вектор – это вектор, приложенный к определенной точке и не допускающий переноса в другие точки.
Скользящий вектор – это вектор, точку приложения которого можно перемещать вдоль линии его действия.
Свободный вектор – это вектор, точку приложения которого можно помещать в любую точку пространства.
Такм образом, если мы изучаем деформации в теле, то все приложенные к нему силы являются связанными векторами.
Но в задачах теоретической механики, мы изучаем скорости движения тел, считая их твердыми. Перемещение точки приложения силы вдоль линии ее действия не меняет уравнений движения. Поэтому силы в теоретической механике являются скользящими векторами.
Момент пары сил и угловая скорость вращения тела являются примерами свободных векторов.
Системы сил
Система сил – это совокупность нескольких сил, действующих на данное тело или систему тел.
Эквивалентные системы сил – это системы сил, под действием которых твердое тело находится в одинаковых кинематических состояниях ⇑.
Равнодействующая сила – это сила, эквивалентная некоторой системе сил.
Система взаимно уравновешивающихся сил – это система сил, которая не меняет кинематическое состояние ⇑ тела.
Внешние силы, действующие на механическую систему – это силы, действующие на тела рассматриваемой системы со стороны тел, не входящих в эту систему.
Внутренние силы, действующие на механическую систему – это силы, действующие на тела рассматриваемой системы со стороны тел, входящих в эту систему.
Например, если в качестве механической системы мы возьмем стол с лежащей на нем книгой, то силы тяжести, действующие на оба тела и сила давления поверхности пола на стол, являются внешними силами. А сила давления книги на стол и сила давления стола на книгу будут внутренними.
Использованная литература:
А. А. Яблонский, В.М. Никифорова, Курс теоретической механики, часть 1, статика, кинематика. Москва, «Высшая школа», 1966.
Статика

Статика – это раздел механики, изучающий условия равновесия тел.
Виды равновесия тел

Момент силы
Момент силы – это физическая величина, равная произведению модуля силы на ее плечо.
Обозначение – \( M \) , единицы измерения – Н·м.

где \( d \) – плечо силы \( F \) .

Плечо силы – это кратчайшее расстояние (перпендикуляр) от оси вращения до прямой, вдоль которой действует сила.
Обозначение – \( d \) или \( l \) , единицы измерения – м.
Знак момента силы
Если сила, приложенная к телу, вращает его по часовой стрелке, то момент силы положителен ( \( M \) > 0):

Если сила, приложенная к телу, вращает его против часовой стрелки, то момент силы отрицателен ( \( M \) Условия равновесия тел
Тело находится в равновесии, если

Центр тяжести – это точка внутри тела или вне его, относительно которой сумма моментов сил тяжести, действующих на отдельные его части, равна нулю.
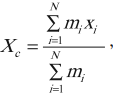
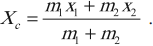
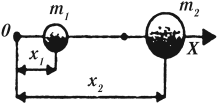
Центр масс – геометрическая точка, положение которой характеризует распределение масс в теле:
Важно!
Для твердого тела центр тяжести совпадает с центром масс.
Простые механизмы
Простые механизмы – это приспособления, служащие для преобразования силы.
Рычаг – это простейшее механическое устройство, представляющее собой твердое тело (перекладину), вращающееся вокруг точки опоры.
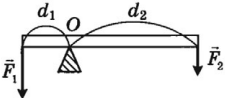
Рычаг дает выигрыш в силе:

Блок — простое механическое устройство, представляющее собой колесо с желобом по окружности, вращающееся вокруг своей оси. Желоб предназначен для каната, цепи, ремня и т. п.
Блок бывает подвижный и неподвижный.
Неподвижный блок – это блок, ось которого закреплена.
Неподвижный блок не дает выигрыша в силе, он используется для изменения направления действия силы.
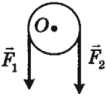
Подвижный блок – это блок, имеющий свободную ось.

Подвижный блок дает выигрыш в силе в 2 раза:
«Золотое правило» механики
При использовании простых механизмов во сколько раз выигрываем в силе, во столько же раз проигрываем в расстоянии, т. е. простые механизмы выигрыша в работе не дают.
Давление жидкости
Давление жидкости – это величина, равная произведению плотности жидкости на модуль ускорения свободного падения и на высоту столба жидкости.

где \( \rho \) – плотность жидкости,
\( h \) – высота столба жидкости.
Сила давления жидкости – это сила, равная произведению давления жидкости на площадь поверхности:



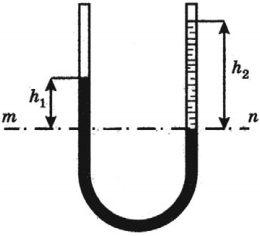
Сообщающиеся сосуды
Сообщающиеся сосуды – это сосуды, соединенные между собой ниже уровня жидкости.
Закон сообщающихся сосудов:
в неподвижных и открытых сообщающихся сосудах любой формы давление жидкости на любом горизонтальном уровне одинаково.
Следствия из закона сообщающихся сосудов:

Важно!
Давление, которое создает жидкость, находящаяся в равновесии при действии на нее силы тяжести, называют гидростатическим. Гидростатическое давление определяется формулой \( p=\rho gh \) .
Давление внутри жидкости на любой глубине складывается из атмосферного давления, или внешнего давления на жидкость, и гидростатического давления:
где \( p_0 \) – атмосферное давление.
Закон Паскаля
Закон Паскаля
Давление, производимое на жидкость или газ, передается по всем направлениям одинаково.
Следствие из закона Паскаля — гидростатический парадокс: давление, производимое на дно сосуда, зависит только от высоты столба жидкости:

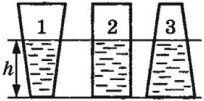
Сила давления жидкости на дно разная, т.к. она зависит от площади дна:

Гидравлический пресс – два сообщающихся сосуда, заполненные жидкостью и закрытые поршнями различной площади.
Гидравлический пресс дает выигрыш в силе, но проигрыш в длине пути поршня:

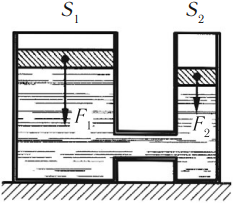
Силы, действующие на поршни гидравлического пресса, пропорциональны площадям этих поршней:

Атмосферное давление – это давление, которое оказывает атмосфера на все находящиеся в ней предметы.
Атмосферное давление уменьшается с увеличением высоты подъема над Землей.
Нормальное атмосферное давление: \( p_0 \) = 10 5 Па.
Приборы для измерения давления:
Закон Архимеда
Архимедова сила – это выталкивающая сила, действующая на тело, погруженное в жидкость или газ.
Причина возникновения выталкивающей силы – разница давлений жидкости или газа на верхнюю и нижнюю грани.
Архимедова сила всегда направлена перпендикулярно поверхности жидкости.
Архимедова сила равна разности веса тела в воздухе и веса тела в жидкости или газе:
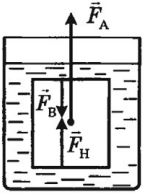
где \( P_1 \) – вес тела в воздухе,
\( P_2 \) – вес тела в жидкости или газе.
Закон Архимеда
На тело, погруженное в жидкость или газ, действует выталкивающая сила, равная весу жидкости или газа, вытесненных телом:

Если тело полностью погружено в жидкость, то

где \( V_m \) – объем тела, погруженного в жидкость.
Если тело не полностью погружено в жидкость, то

где \( V_ <чm>\) – объем части тела, погруженной в жидкость.
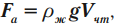
Условия плавания тел
На любое тело, погруженное в жидкость или газ, действуют две силы, направленные в противоположные стороны, – это сила тяжести и архимедова сила. Направление движения тела зависит от того, какая из этих сил больше по модулю.
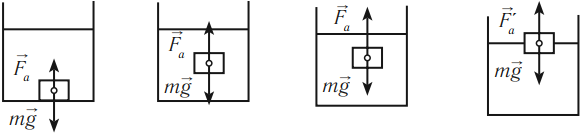
Условия плавания тел




где \( V_1 \) – объем части тела, погруженной в жидкость.
Важно!
Выталкивающая сила действует на тела в жидкостях и газах, потому что сжаты силой притяжения к Земле. В состоянии невесомости эта сила не действует.
Статика – раздел теоретической механики
Определение и роль статики в теоретической механике
Основной задачей статики является установление законов преобразования системы сил в эквивалентные системы. Методы статики применяются не только при изучении тел, находящихся в равновесии, но и в динамике твердого тела, при преобразовании сил в более простые эквивалентные системы.
Под состоянием равновесия, в статике, понимается состояние, при котором все части механической системы покоятся относительно некоторой инерциальной системы координат. Одним из базовых объектов статики являются силы и точки их приложения.
Понятие силы
Единицей измерения силы является один Ньютон:
.
В технике широко используется килоньютон:
.
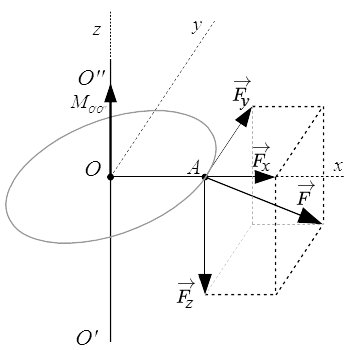
Как следует из определения, сила – это векторная величина, которая, в трехмерном пространстве, имеет три проекции на оси координат. Также задать силу можно с помощью абсолютной величины (модуля) и направления. Для материальной точки, сила приложена к самой точке. Но если мы рассматриваем твердое тело, то кроме вектора силы нам нужно еще указать и точку ее приложения. Таким образом, действие силы на твердое тело характеризуется вектором силы и точкой ее приложения. Если выбрать систему отсчета, то действие силы на твердое тело определяется двумя векторами. Это вектор силы, и вектор, проведенный из начала системы отсчета в точку приложения силы.
Система сил, действующих на тело – это совокупность векторов сил, приложенных к телу, и точек их приложения.
Эквивалентные системы сил Две системы сил являются эквивалентными, если законы движения любых точек твердого тела совпадают при действии любой из этих систем.
Эквивалентное преобразование системы сил – это переход от одной системы сил к эквивалентной ей системе.
Система взаимно уравновешивающихся сил – это система сил, не меняющая уравнений движения или уравнений равновесия твердого тела. То есть это система, эквивалентная отсутствию сил.
Равнодействующая – это одна сила, действие которой эквивалентно действию данной системы сил.
Закрепленные, скользящие и свободные векторы
Поскольку действие силы на твердое тело определяется двумя векторами, то часто под силой подразумевают множество, состоящее из двух векторов – вектора силы, и вектора точки ее приложения относительно выбранной системы координат. Такие множества подразделяются на три класса, для которых вводят специальные термины.
Закрепленный вектор – это множество, состоящее из образующего вектора и точки его приложения. Два закрепленных вектора считаются равными только в том случае, если равны их образующие векторы и совпадают точки приложения. Закрепленный вектор также называют связанным или фиксированным вектором.
Скользящий вектор – это множество, состоящее из образующего вектора и точки его приложения, обладающее тем свойством, что точку приложения можно перемещать вдоль прямой, параллельно образующему вектору. То есть два скользящих вектора считаются равными, если равны образующие векторы и точки их приложения расположены на одной прямой, параллельной образующему вектору.
Свободный вектор – это множество, состоящее из образующего вектора и точки его приложения. Два свободных вектора считаются равными, если равны образующие векторы, не зависимо от точек приложения.
Линия действия силы – это прямая, проведенная через точку приложения силы параллельно ее направлению.
Если мы рассматриваем упругое тело, то сила – это закрепленный вектор. Деформации зависят не только от величин и направлений сил, но и от точек их приложения. Если мы рассматриваем движение или равновесие абсолютно твердого тела, то действующая сила является скользящим вектором. Перемещение ее точки приложения вдоль линии ее действия не меняет уравнений движения или уравнений равновесия. Угловая скорость вращения абсолютно твердого тела является свободным вектором. Она характеризует движение в целом, и ее значение одинаково во всех точках тела.
С математической точки зрения, статика – это алгебра скользящих векторов.
Проекции силы на оси координат
Сила в трехмерном пространстве
Сила на плоскости
Аксиомы статики
Часть аксиом являются основными законами механики. Другая часть относится к законам преобразования сил, действующих на абсолютно твердое тело, и применяется только к задачам теоретической механики. По своей сути, они выражают собой тот факт, что действие силы на тело является скользящим вектором.
1. Аксиома инерции (закон инерции Галилея)
Существуют такие системы отсчета, в которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если тело покоилось в определенный момент времени, то оно будет покоиться и в последующие моменты.
Такие системы отсчета называются инерциальными. В механике, если это особо не оговорено, под системой отсчета подразумевается именно инерциальная система отсчета. Аксиому инерции иногда формулируют так.
1′. Аксиома инерции
В инерциальной системе отсчета, под действием взаимно уравновешивающихся сил, материальная точка находится в состоянии покоя или движется прямолинейно и равномерно, а первоначально покоившееся тело продолжает покоиться и в последующие моменты времени.
2. Аксиома равновесия двух сил
Две силы, приложенные к абсолютно твердому телу, являются уравновешенными тогда и только тогда, когда они равны по модулю, направлены в противоположные стороны и их линии действия совпадают.
3. Аксиома присоединения и исключения уравновешивающихся сил
Кинематическое состояние твердого тела не изменится, если к действующей на него системе сил прибавить или отнять уравновешенную систему сил.
То есть, прибавляя или исключая уравновешенную систему сил, мы получаем эквивалентную систему сил.
Следствие аксиом 2 и 3
Действие силы на твердое тело не изменится, если точку приложения силы перенести вдоль ее линии действия. То есть сила, приложенная к твердому телу, является скользящим вектором. Доказательство
4. Аксиома параллелограмма сил
Две силы, приложенные к телу в одной точке, можно заменить их равнодействующей силой, равной векторной сумме этих сил и приложенной к той же точке.
Верно и обратное. Любую силу можно разложить на две (и более) силы по правилу векторной суммы (по правилу параллелограмма), приложенных в той же точке, что и исходная сила.
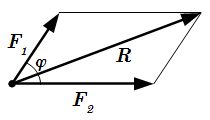
Сложение сил по правилу параллелограмма
5. Аксиома равенства действия и противодействия (3-й закон Ньютона)
Всякому действию соответствует равное и противоположно направленное противодействие.
То есть если мы возьмем все силы, действующие на тело 2 со стороны тела 1, и объединим их с силами, действующими на тело 1 со стороны тела 2, то получим уравновешенную систему сил.
6. Принцип отвердевания
Если деформируемое тело находится в равновесии, то его равновесие не нарушится, если тело считать абсолютно твердым.
Система сходящихся сил
Таким образом, проекции равнодействующей системы сходящихся сил на координатные оси равны алгебраическим суммам проекций этих сил на оси координат:
;
.
Условия равновесия системы сходящихся сил
Если тело или система тел, на которые действует сходящаяся система сил, находится в покое, то равнодействующая этих сил равна нулю:
.
Это дает три уравнения равновесия:
.
Теорема о трех непараллельных силах
Если твердое тело находится в равновесии под действием трех сил, линии действия двух из которых пересекаются в одной точке, то все силы лежат в одной плоскости и являются сходящимися.
Следствие
Если твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то эти силы являются сходящимися.
Параллельные силы
Ранее мы отмечали, что система сходящихся сил имеет равнодействующую. То есть такую систему можно заменить одной силой. Приведем еще важные примеры систем сил, имеющих равнодействующую.
Две силы одного направления
Две противоположно направленные силы
Момент силы относительно точки
Определение
Геометрическая интерпретация
Компоненты момента силы в декартовой системе координат
Свойства момента силы относительно центра
Если точку приложения силы переместить вдоль линии, проходящей через вектор силы, то момент, при таком перемещении, не изменится.
Доказательство
Момент от векторной суммы сил, приложенных к одной точке тела, равен векторной сумме моментов от каждой из сил, приложенных к этой же точке:
.
Доказательство
То же самое относится и к силам, чьи линии продолжения пересекаются в одной точке.
Если векторная сумма сил равна нулю:
,
то сумма моментов от этих сил не зависит от положения центра, относительно которого вычисляются моменты:
.
Доказательство
Теорема Вариньона о моменте равнодействующей
Если данная система сил имеет равнодействующую, то момент равнодействующей относительно любой точки равен векторной сумме моментов сил системы относительно той же точки.
Пара сил
Теорема о независимости выбора центра при вычислении момента пары
Векторная сумма моментов сил, составляющих пару, не зависит от выбора точки, относительно которой вычисляются моменты.
Теорема об эквивалентности пар
Две пары, имеющие равные векторы моментов, эквивалентны. То есть у пары можно менять модуль силы и длину плеча, оставляя неизменным ее момент.
Теорема о возможности перемещения пары
Пару сил можно переносить в любом направлении. Другими словами, если пару сил переместить параллельным переносом в любое положение, то она будет эквивалентна исходной паре.
Теорема о сложении нескольких пар
Система нескольких пар сил эквивалентна одной паре, вектор момента которой равен векторной сумме моментов исходных пар.
Условие равновесия пар
Система, состоящая только из нескольких пар, является уравновешенной, если векторная сумма моментов пар равна нулю:
.
Момент силы относительно оси
Часто встречаются случаи, когда нам нужно знать не все компоненты момента силы относительно выбранной точки, а только проекцию момента на выбранное направление.
Свойства момента силы относительно оси
Момент относительно оси от силы, линия действия которой проходит через эту ось, равен нулю.
Доказательство
Момент относительно оси от силы, параллельной этой оси равен нулю.
Доказательство
Вычисление момента силы относительно оси
Условия равновесия
Главный вектор и главный момент
Подчеркнем, что величина главного момента зависит от выбора центра, относительно которого вычисляются моменты.
Пространственная система сил
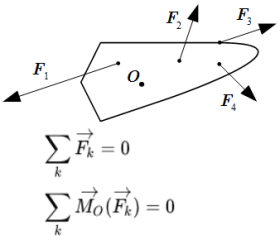
Основная форма условий равновесия
Это основная форма условий равновесия. Точка C может, как принадлежать телу, так и находится за его пределами. Обычно центр C выбирают так, чтобы сделать вычисления более простыми. Спроектировав каждое из этих векторных уравнений на три направления, получим шесть уравнений, из которых можно определить шесть неизвестных величин.
Вторая форма условий равновесия
Третья форма условий равновесия
Плоская система сил
Условия равновесия плоского тела
Основная форма условий равновесия
;
;
.
Вторая форма условий равновесия
;
;
.
Третья форма условий равновесия
;
;
;
.
Связи и их реакции
Определения и свойства
Принцип освобождаемости
Всякое несвободное тело можно рассматривать как свободное, если действие связей заменить их реакциями, приложенными к телу.
Основные типы связей и их реакции
Плоские и пространственные задачи
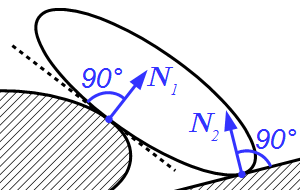
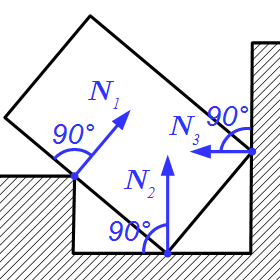
Две гладкие не острые поверхности. Через точку соприкосновения проводим касательную плоскость к этим поверхностям. Реакция является силой, направленной перпендикулярно этой плоскости, то есть, направлена по нормали к обеим поверхностям в точке их соприкосновения.
Одна из гладких поверхностей является острием. Реакция является силой, направленной вдоль нормали не острой поверхности в точке соприкосновения.
Две шероховатые поверхности. То же самое, что и для гладких поверхностей, только в точке соприкосновения добавляем силу трения, лежащую в плоскости касания.
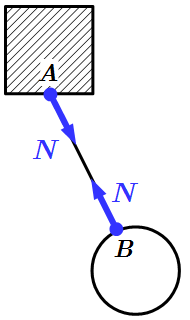
Невесомая нить и стержень. Реакция направлена вдоль нити или стержня. При этом на нить всегда действует сила растяжения. На стержень может действовать как растягивающая, так и сжимающая сила.
Плоские задачи
Следующие связи применяют только в плоских задачах.
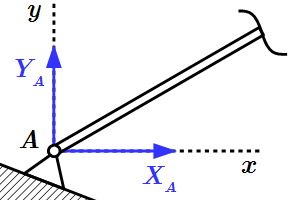
Неподвижный шарнир. Реакция является силой, проходящей через ось шарнира. Обычно ее раскладывают на две составляющие параллельно осям координат.
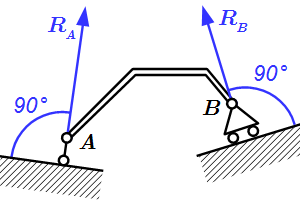
Подвижный шарнир, или опора на катках. Реакция является силой, которая проходит через ось шарнира перпендикулярно опорной поверхности.
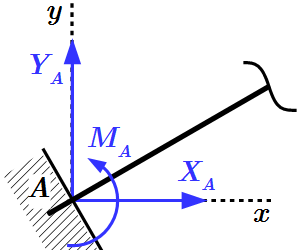
Заделка. Реакция состоит из силы, проходящей через точку соединения и момента относительно оси, проходящей через точку соединения перпендикулярно плоскости фигуры. Силу обычно раскладывают на две составляющие параллельно осям координат.
Пространственные задачи
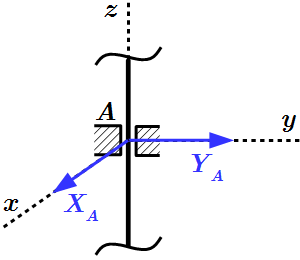
Цилиндрический шарнир или петля. Реакция является силой, проходящей через ось шарнира, перпендикулярно направлению оси. Обычно ее раскладывают на две составляющие параллельно осям координат.
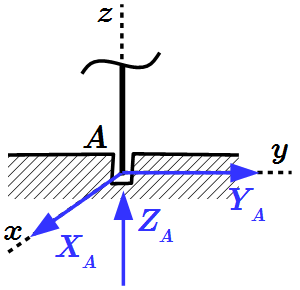
Сферический подшипник или подпятник. Реакция является силой, проходящей через центр подшипника. Обычно ее раскладывают на три составляющие параллельно осям координат.
![]()
Заделка. Реакция состоит из силы, проходящей через точку соединения и момента относительно этой точки. Силу и момент обычно раскладывают на три составляющие параллельно осям координат.
Силы трения
Трение скольжения
Сила трения скольжения – это сила трения, приложенная к точкам соприкосновения движущихся тел и параллельная плоскости их соприкосновения. То есть это сила, препятствующая скольжению одного тела по поверхности другого. При расчетах, под силой трения скольжения понимают равнодействующую всех сил трения, возникающих в точках соприкосновения тел.
Закон Амонта – Кулона
Сила трения скольжения направлена параллельно плоскости соприкосновения тел в сторону, противоположную их движению, которое возникло бы при отсутствии трения. Она не зависит от площади соприкосновения поверхностей, а зависит от силы давления N одной поверхности на другую, перпендикулярную плоскости соприкосновения тел:
.
Трение сцепления
Сила трения сцепления – это сила трения скольжения, когда относительное перемещение соприкасающихся тел отсутствует.
Предельная сила трения – это максимальное значение силы трения сцепления.
Предельное равновесие – это состояние равновесия, при котором значение силы трения сцепления равно ее максимальному значению.
Заклинивание механизма – это явление в механике, при котором система остается в состоянии покоя при любом, сколь угодно большом увеличении модуля внешней силы.
Условие возникновения движения при наличии трения
Для того чтобы тело начало движение, необходимо и достаточно, чтобы равнодействующая внешних сил находилась вне конуса трения.
Трение качения
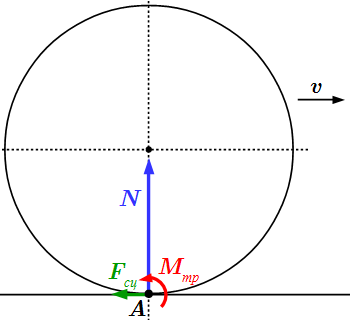
Расчетная схема трения качения.
Центр тяжести тела
Центр тяжести в пространстве
Если бы мы находили равнодействующую сил тяжести, выполняя эквивалентные преобразования сил, то мы бы нашли только линию действия равнодействующей. Далее, если повернуть тело на некоторый угол, то можно найти другую линию действия равнодействующей. При этом все, подобным образом построенные линии, пересекаются в одной точке, которая и является центром тяжести тела.
Центр тяжести твердого тела – это точка, связанная с телом, через которую проходит линия действия равнодействующей сил тяжести частиц тела, при любом положении тела в пространстве.
Вес тела – это абсолютное значение равнодействующей сил тяжести частиц, составляющих тело.
В случае, когда силы имеют другое происхождение, но также имеют одинаковое направление, то мы имеем дело с системой параллельных сил. В этом случае, точка C называется центром параллельных сил.
Центр тяжести плоской фигуры
Однородная фигура
В рассматриваемом нами случае, статические моменты относительно осей x, y определяются по формулам:
.
Статические моменты широко используются при расчете конструкций. Для стандартных профилей, их значения указываются в соответствующих справочниках.
Центры тяжести простейших фигур
Теоремы, применяемые при расчете центра тяжести
Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси.
Если однородное тело имеет плоскость симметрии, то его центр тяжести находится в этой плоскости.
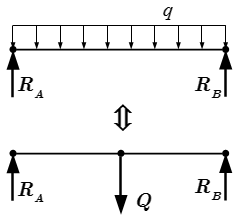
Распределенная нагрузка
Силу тяжести протяженных тел, на схемах, изображают в виде эпюр. Также встречаются подобные силе тяжести параллельные силы, приложенные не в определенных точках тела, а непрерывно распределенные по его поверхности или объему. Такие силы называют распределенными силами или распределенными нагрузками.
Приведение системы сил к центру
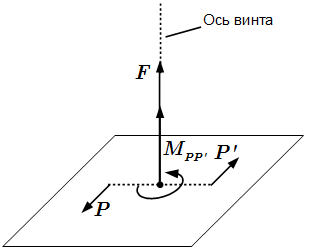
Теорема о параллельном переносе силы (лемма Пуансо)
Сила, действующая на данное тело, эквивалентна силе, полученной параллельным переносом исходной силы в любую точку тела и паре сил с моментом, равным моменту исходной силы относительно новой точки ее приложения.
Статические инварианты
Итак, статическими инвариантами являются следующие величины:
– квадрат модуля главного вектора;
– скалярное произведение главного вектора на главный момент. Инвариантами также являются функции от инвариантов. Например, проекция главного момента на направление главного вектора является инвариантом:
.
Динама
Динама – одна из простейших систем сил.
Из (П1) мы находим, что минимальное значение модуля момента равно модулю его проекции на направление главного вектора:
.
Центральная ось системы сил
Центральная ось системы сил – это прямая, обладающая тем свойством, что при приведении системы сил к любой из ее точек, система сил является динамой. При этом главный вектор и главный момент динамы параллельны этой прямой, а главный момент имеет наименьшее по модулю значение.
Приведение системы сил к простейшему виду
Пара сил
Равнодействующая сила
Динама
Использованная литература:
А. А. Яблонский, В.М. Никифорова. Курс теоретической механики, часть 1, статика, кинематика. Москва, «Высшая школа», 1966.
С. М. Тарг, Краткий курс теоретической механики, «Высшая школа», 2010.



