Дифференциальные (Д) регуляторы.
Они бывают двух видов: пропорционально-дифференциальные и пропорционально-интегралодифференциальные.
Такие регуляторы целесообразно применять в тех случаях, когда нагрузка объектов регулирования изменяется часто и быстро, а запаздывания велики.
ПД-регулятор осуществляет регулирование не только по величине отклонения регулируемого параметра, но и по его скорости.
Такое регулирование применяют в тех случаях, когда в САР имеются большие запаздывания, отрицательно влияющие на качество регулирования. Уменьшить это влияние можно, если оказать на объект опережающее (предварительное) регулирующее воздействие с учетом скорости изменения регулируемого параметра.
Устройства, позволяющие выработать это воздействие, называются дифференцирующими, или устройствами предварения. Как правило, ими дополняют П- и ПИ-регуляторы, поэтому их также называют приставками. ПД-регулятор образован П-регулятором и Д-приставкой. Он работает согласно уравнению
где Тд — время дифференцирования (предварения) — настроечный параметр Д-приставки.
Схема регулятора изображена на рис. 5, а применительно к регулированию давления газа. С объектом связаны верхняя и нижняя полости мембранной коробки Д-приставки, причем на входе в нижнюю установлен регулируемый дроссель. Шток выводится через уплотнительный сильфон. Когда давление газа постоянно, а дроссель несколько приоткрыт, это Давление устанавливается в обеих полостях коробки и мембрана уравновешивается сверху и снизу. Если же давление в объекте, а следовательно, и в верхней полости резко снижается, то в первый момент времени мембрана окажется неуравновешенной — дроссель не позволит быстрому снижению давления снизу ее. Под действием возникшего перепада давлений мембрана так же резко прогнется вверх и через шток переместит затвор регулирующего органа в крайнее верхнее положение. В этот же момент начнется медленный переток газа из нижней полости через дроссель, и давление в ней постепенно снизится до величины сверху мембраны, которая вновь уравновесится и вернется в исходное состояние. Затвор, двигаясь обратно вниз, займет положение, в которое его установит П-узел регулятора. Временная характеристика ПД-регулятора показана на рис. 5, б. Из нее видно, что Д-приставка реагирует только на скорость изменения регулируемого параметра, временно увеличивая чувствительность П-регулятора. Поэтому проходное сечение регулирующего органа в момент отклонения регулируемого параметра дополнительно изменяется, что обеспечивает компенсацию запаздывания. В рассмотренном примере время Тд устанавливается дросселем. Чем меньше он открыт, тем больше будет эффект предварения. П-регулятор настраивается известным образом. Д-приставку можно подключать и к ПИ-регулятору тогда получится еще более сложный ПИД-регулятор с тремя настроечными параметрами Кр, Ти, ТД.
Для осуществления непрерывных законов регулирования используются регуляторы и контроллеры с непрерывным стандартным выходным сигналом. За основу алгоритма управления в таких устройствах принимают ПИД-закон, который позволяет, манипулируя настройками, реализовать любой закон регулирования, требуемый в данной САР
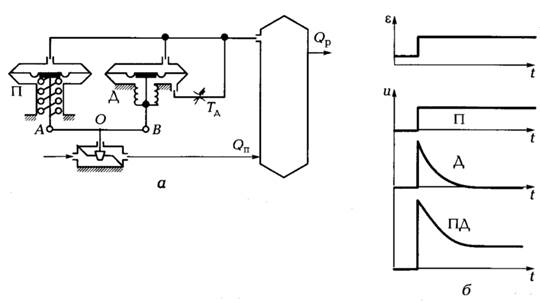
Рисунок 5 – ПД-регулятор
1 Дать определение закону регулирования
2 Какой закон называют П-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример П-регулятора
3 Какой закон называют И-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример И-регулятора
4 Какой закон называют ПИ-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример ПИ-регулятора
5 Какой закон называют ПД-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример ПД-регулятора
6 Какой закон называют ПИД-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример ПИД-регулятора
Дифференциальный регулятор
Дифференциальный регулятор — это прибор для управления технологическим процессом, который используется в методе дифференциального регулирования. Дифференциальные регуляторы не имеют очень широкого применения в промышленности, потому что они не подходят для процессов, подверженных постоянным колебаниям. Тем не менее, существуют области использования, к которым дифференциальные регуляторы хорошо подходят.
 Дифференциальный регулятор
Дифференциальный регулятор
Принцип действия дифференциального регулятора
Такой регулятор добавляет дифференциальное регулирование к пропорциональному. Порция предварения в выходе регулятора отвечает за то, как быстро переменная процесса отклоняется от уставки. Ответ предварения (дифференцирования) принимает форму повышения выхода, что используется для остановки отклонения переменной процесса. Величина повышения зависит от того, как быстро переменная процесса отклоняется от уставки. Если скорость изменения мала, то повышение выхода меньше, чем это было бы при высокой скорости отклонения. Дифференциальный регулятор в действии ожидает какой величины отклонение случится в данный период времени, и повышает свой выход на основе этого предсказания.
Для того, чтобы понять, как регулятор обеспечивает дифференцирование, полезно проследить за тем, что происходит при увеличении входа: входной сигнал подается на входной сильфон и на нижний дифференциальный сильфон в одно и то же время. Нижний дифференциальный сильфон находится ближе к точке опоры чем входной сильфон. При таком устройстве, когда вход увеличивается, сила, приложенная нижним дифференциальным сильфоном, заставляет клапан переместиться ближе к соплу. Не смотря на то, что силы, приложенные обоими сильфонами, одинаковы — сила, прикладываемая нижним дифференциальным сильфоном действует ближе к точке опоры. Это приводит к большему движению балансира на другом конце. В результате, выход немедленно повышается на величину, зависящую от скорости изменения входа.
Дифференциальный регулятор (Д-регулятор)
Интегральный регулятор (И-регулятор).
 |
Принципиальная схема регулятора приведена на рис. 4.26.
Рис. 4.26. Принципиальная электрическая схема И-регулятора
Передаточная функция регулятора
 (4.39)
(4.39)
Переходная характеристика регулятора:
 |
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.27.
Рис. 4.27. Переходный процесс
 |
Функциональная схема интегрального регулятора приведена на рис. 4.28.
Рис. 4.28. Функциональная схема И-регулятора
 |
Принципиальная схема регулятора приведена на рис. 4.29.
Рис. 4.29. Принципиальная электрическая схема Д-регулятора
Передаточная функция регулятора
 (4.40)
(4.40)
Переходная характеристика регулятора:
Переходный процесс в регуляторе будет иметь вид, изображенный на рис. 4.30.
Рис. 4.30. Переходный процесс
Следует отметить, что ограниченная полоса пропускания частот самих операционных усилителей не позволяет реализовать чистое (идеальное) дифференцирование. Кроме того, в силу низкой помехозащищенности дифференциальных регуляторов сложилась практика применения реальных дифференцирующих звеньев, и принципиальные схемы таких регуляторов несколько отличаются от приведенной на рис. 4.29.
Функциональная схема дифференциального регулятора приведена на рис. 4.31.
Рис. 4.31. Функциональная схема
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
ПИД-регулятор
В этом уроке
Видео версия урока
Общие сведения о ПИД-регуляторе:
В прошлом уроке мы разобрались с работой ПД-регулятора.
Пропорциональный регулятор возвращает результат, который
пропорционален текущему значению ошибки.
Это достигается простым умножением текущей ошибки на коэффициент kP:
P = ОШИБКА * kP
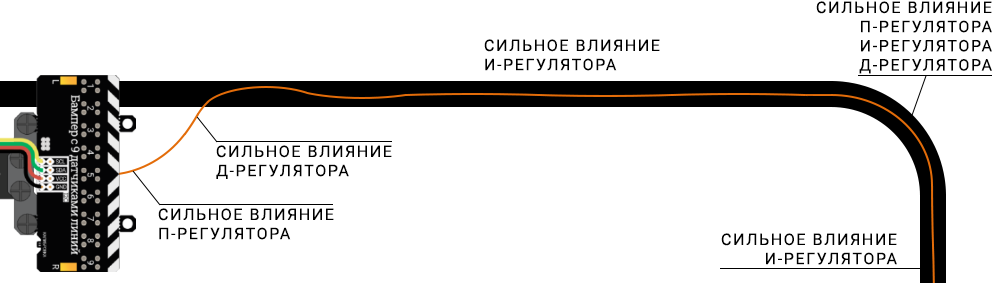
П-регулятор указывает машине повернуть в сторону линии. Чем дальше линия от центра бампера, итем сильнее ошибка отличается от 0, тем круче поворот машины.
Недостатком П-регулятора является то, что он не может работать на больших скоростях.
Для борьбы с указанным недостатком в одном регуляторе совмещают пропорциональную (П) и дифференциальную (Д) составляющую, получается ПД-регулятор.
Дифференциальная составляющая (от лат. differentia – разность) — это разность между текущей и предыдущей ошибкой.
Дифференциальный регулятор возвращает результат, который
зависит от скорости изменения текущей ошибки.
Это достигается умножением разности ошибок на коэффициент kD:
D = (ОШИБКА – предыдущая ОШИБКА) * кD
Ошибки для Д-регулятора берутся через одинаковые интервалы времени, значит разность между текущей и предыдущей ошибкой, является скоростью изменения ошибки.
Чем выше скорость изменения ошибки, тем сильнее влияние Д-регулятора.
Д-регулятор выполняет сразу две задачи: он помогает П-регулятору справиться с резкими поворотами и превращает крутой въезд на линию в более пологим.
Недостатком Д-регулятора является его чувствительность к шумам (некорректным данным).
Недостатком ПД-регулятора является то, что он не может справиться с маленькими ошибками. Это выражается в незначительных отклонениях при движении по прямой линии и отклонении к внешнему краю линии при движении по дугам или поворотам трассы.
Для борьбы с указанными недостатками в одном регуляторе совмещают пропорциональную (П), интегральную (И) и дифференциальную (Д) составляющую, получается ПИД-регулятор.
Интегральная составляющая (от лат. integra – составной) — это сумма нескольких последних ошибок.
Интегральный регулятор возвращает результат, который
зависит от суммы последних ошибок.
Это достигается умножением суммы ошибок на коэффициент kI.
I = СУММА ПОСЛЕДНИХ ОШИБОК * кI
Количество ошибок в сумме определяет скорость реакции И-регулятора:
И-регулятор позволяет исправить статические и слабые ошибки, а также избавиться от нежелательного воздействия шумов на Д-регулятор.
И-регулятор помогает ПД-регулятору выровнять центр бампера с центром линии как на прямых участках, так и на поворотах.
Пример: представим, что машина едет по дуге, и бампер выдаёт ошибку 0,5. П-регулятор слабо доворачивает вправо, — этого хватает для движения по линии, но ошибка сохраняется на прежнем уровне до завершения поворота. Значит, весь путь центр бампера был смещён от центра линии. Сумма из 10 ошибок по 0,5 уже равна 5, и И-регулятор поможет П-регулятору скорректировать путь так, что центр бампера пройдёт по центру линии на протяжении всей дуги.
Пример: предположим, что на линии трассы появилась царапина, — это будет шумом для Д-регулятора, который резко среагирует, и машина «дёрнется» на линии. Но И-регулятор сгладит воздействие Д-регулятора, так как изменение всего 1 из 10 ошибок является незначительным.
ПИД регулятор возвращает результат, который является суммой
пропорциональной, интегральной и дифференциальной составляющих:
PID = P + I + D
Поведение составляющих ПИД-регулятора:
Поведение составляющих ПД-регулятора было рассмотрено в предыдущем уроке. Ниже представлена картинка движения машины по линии с ПД-регулятором:

Как видно из картинки выше, у ПД-регулятора есть два слабых места: на прямой линии машина едет с небольшими отклонениями, и на повороте видно отклонение центра бампера от центра линии.
После добавления интегральной составляющей, картинка станет такой:
И-регулятор накапливает ошибки и оценивает их сумму. Это позволяет ему справляться со статическими или слабыми ошибками. Теперь машина едет по прямой и на повороте ровнее
Код ПИД-регулятора:
Настройка ПИД-регулятора:
Коэффициент регулятора определяет силу воздействия регулятора.
Чем больше коэффициент, тем сильнее меняется выходная величина.
Немного пояснений к коду loop ():
Дополнительное задание.
Попробуйте изменить коэффициент И-регулятора kI и посмотрите на результат.
Скетч для диапазона скоростей:
В предыдущем скетче все коэффициенты были найдены для скорости 60%. Если уменьшить скорость движения машины speed с 60% до 30%, то найденные ранее коэффициенты будут слишком велики, и мы получим перерегулирование.
Выход из положения — найти коэффициенты для минимальной и максимальной скоростей машины, после чего вывести формулы зависимости коэффициентов от скорости. Мы уже так делали в предыдущих уроках с коэффициентами kP и kD. Коэффициент kI обычно столь мал, что не сильно зависит от скорости.
Теперь можно написать скетч, у которого скорость можно менять от 20 до 60%:
Этот скетч отличается от предыдущего только тем, что значения kP и kD определены не числами, а формулами.
При изменении значений скорости speed в пределах от 20% до 60%, будут автоматически пересчитываться коэффициенты kP и kD, и машина продолжит корректно двигаться по линии
Итак, мы получили ПИД-регулятор — зачастую самый оптимальный способ регулирования. При грамотной настройке можно добиться невероятно точной и в то же время быстрой езды. Обязательно «поиграйтесь» с коэффициентами, если Вы этого еще не делали.
Дифференциальное регулирование
Дифференциальное регулирование — это выработка составляющей выходного сигнала регулятора, величина которой зависит от скорости возникновения отклонения регулируемой переменной от уставки срабатывания.
Дифференциальный закон регулирования
Дифференциальный закон регулирования — это процесс регулирования, при котором регулирующее воздействие (выходной сигнал регулятора) пропорционально скорости изменения отклонения регулируемой переменной от заданного значения. При этом, выходной сигнал регулятора мгновенно заставляет регулирующий орган изменить свое положение на большую величину, чем это было бы только с пропорциональным регулированием.
Принцип работы дифференциального регулирования
Если изменение регулируемой переменной процесса происходит быстро, дифференциальный регулятор ответит большой величиной выработанного им управляющего воздействия. Если изменения происходят медленно, величина управляющего воздействия меньше. Если не происходит никаких изменений, никакое управляющее воздействие не вырабатывается.
Как и в случае интегрального регулирования, дифференциальное регулирование не существует непосредственно само по себе: оно всегда объединяется с пропорциональным регулированием. При дифференциальной составляющей, добавленной к пропорциональному регулятору, когда происходит изменение регулируемой переменной, регулятор измеряет скорость изменения и производит мгновенное наращивание пропорционального выходного сигнала.
В действительности, этот режим регулирования противодействует изменению входного сигнала регулятора (регулируемой переменной процесса) и пытается останавливать изменения, как только они обнаружены. Когда изменения входного сигнала прекращаются, корректирующее воздействие, производимое дифференциальным регулятором исчезает, и остается только часть выходного сигнала, выработанная пропорциональным регулятором.
Дифференциальное регулирование особенно эффективно для процессов, которые имеют большие запаздывания. Например, в системе регулирования температуры с большой емкостью, сопротивлением и чистым запаздыванием пройдет немало времени пока возмущение по температуре проявится как рассогласование регулируемой переменной (температуры).



