Динамический момент.
Возникает при изменении частоты врашения и обусловлен силами инерции всех без исключения движущихся частей электропривода.
Формула динамического момента имеет вид :
М дин = J dω / dt
Динамический момент, возникающий под действием сил инерции, увеличивает времяпереходных процессов, например, время пуска и остановки электропривода.
Для уменьшения динамического момента в двигателях специального исполнения
уменьшают диаметр ротора и одновременно, для сохранения мощности двигателя, увели-
чивают его длину. Такие двигатели применяют в электроприводах грузоподъемных меха-
низмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми ( от грузового крана ).
Уравнение движения электропривола.
Как известно, согласно законам механики, всегда существует зависимость
между силами, вызывающими движение, и силами сопротивления, противодействующими этому движению.
Для вращательного движения этот закон имеет вид :
Подставив в эту формулу значение динамического момента, получим
Уравнение движения электропривода :
Различают естественные и искусственные механические характеристикиЭД.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможе
Механические характеристики ЭД всех типов различаются по степени жесткости.
Режимы работы электропривода, динамический момент




![]()
![]()
Время торможения и изменения скорости электропривода.
Время пуска двигателя в холостом режиме и под нагрузкой.
Уравнение движения электропривода.
Режимы работы электропривода, динамический момент.
ПЛАН ЛЕКЦИИ
Основы механики электропривода
ТЕМА ЛЕКЦИИ 3
Электропривод работает в двух режимах:
1.установившийсяили статическийрежим,это режим при котором скорость приводане изменяется;
2. переходныйили динамический режим, это режим при котором скорость изменяется.
Переходный режим может возникнуть в следующих случаях:
1. при изменении параметров двигателя, например, изменение сопротивления в цепи ротора; изменение числа пар полюсов статора и т.д.;
2. при изменении нагрузки механизма, напримеризменение подачи насоса, изменение величины сил трения якоря по грунту и т.д.;
3. при изменении параметров судовой сети, например, при уменьшении величины напряжения или частоты тока во время включения электродвигателей большой мощности.
В переходном режиме электропривод переходит от одного установившегося режима к другому, при этом изменяются скорость, момент, и ток электродвигателя.
В установившемся режиме электромагнитный момент равен статическому моменту и противоположен ему по направлению,
ипривод работает с постоянной скоростью
В переходном режиме происходит ускорение или замедлениепривода и возникает инерционный илидинамический момент, который двигатель должен преодолеть.
где: суммарный момент инерции всех элементов привода, приведенный к скорости вращения вала двигателя
– угловая скорость; – угловое ускорение.
Появление динамического момента объясняется действием сил инерции всех частей электропривода и исполнительного механизма.
Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря или ротора электродвигателя, шестерней редуктора, барабана лебёдки и т.д..
Динамический момент увеличивает время пуска и остановки электропривода, а так же время достижения установившейся скорости.
Для уменьшениядинамического момента в двигателях специального исполнения уменьшают диаметр ротора и одновременно увеличивают длину ротора, с целью сохранения мощности двигателя. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми (название произошло от грузового крана).
Режимы работы электроприводов. Динамический момент
![]()
![]()
В зависимости от изменения скорости электропривода, различают два режима его работы:
1. установившийсяили статическийрежим, при котором скорость не изменяется;
2. переходный или динамический режим, при котором скорость изменяется.
Переходный режим может возникнуть в таких случаях:
1. при изменении параметров двигателя, например, при регулировании скорости изменением сопротивления в цепи обмотки якоря;
2. при изменении параметров механизма, например, при изменении подачи насоса;
3. при изменении параметров судовой сети, например, при колебаниях напряжения.
В динамическом режиме, в дополнение к ранее рассмотренным электромагнитному моменту двигателя М и статическому моменту механизма М  , на валу двигателя возникает дополнительный, так называемый динамический момент М
, на валу двигателя возникает дополнительный, так называемый динамический момент М  .
.
Появление этого момента объясняется действием сил инерции всех без исключения движущихся частей электропривода. Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря электродвигателя, шестерней редуктора, грузового барабана и самого груза.
Динамический момент, возникающий под действием сил инерции, увеличивает время переходных процессов, например, время пуска и остановки электропривода.
Для уменьшения динамического момента в двигателях специального исполнения уменьшают диаметр ротора и одновременно, для сохранения мощности двигателя, увеличивают его длину. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми ( от грузового крана ).
3. Механические характеристики электродвигателей
Механическая характеристика электродвигателя— это зависимость угловой скорости ЭД от момента на его валу: ω (М). У большинства ЭД (кроме синхронных) с увеличением нагрузки на валу угловая скорость уменьшается. Характер изменения угловой скорости двигателя с изменением момента сопротивления определяет жесткость механической характеристики. По степени жесткости различают механические характеристики трех видов (рис. 3): абсолютно жесткие, жесткие и мягкие.
Абсолютно жесткие характеристики присущи синхронным двигателям (прямая 1). При изменяющемся моменте в пределах перегрузочной способности угловая скорость этих ЭД не изменяется.
Жесткими характеристиками обладают ЭД постоянного тока параллельного возбуждения (наклонная прямая 2) и асинхронные электродвигатели в пределах рабочей части их характеристик (верхняя часть кривой 3). У этих ЭД при значительном изменении момента скорость изменяется в меньшей степени.
Мягкие характеристики свойственны ЭД постоянного тока последовательного (кривая 4), смешанного возбуждения (кривая 5) и
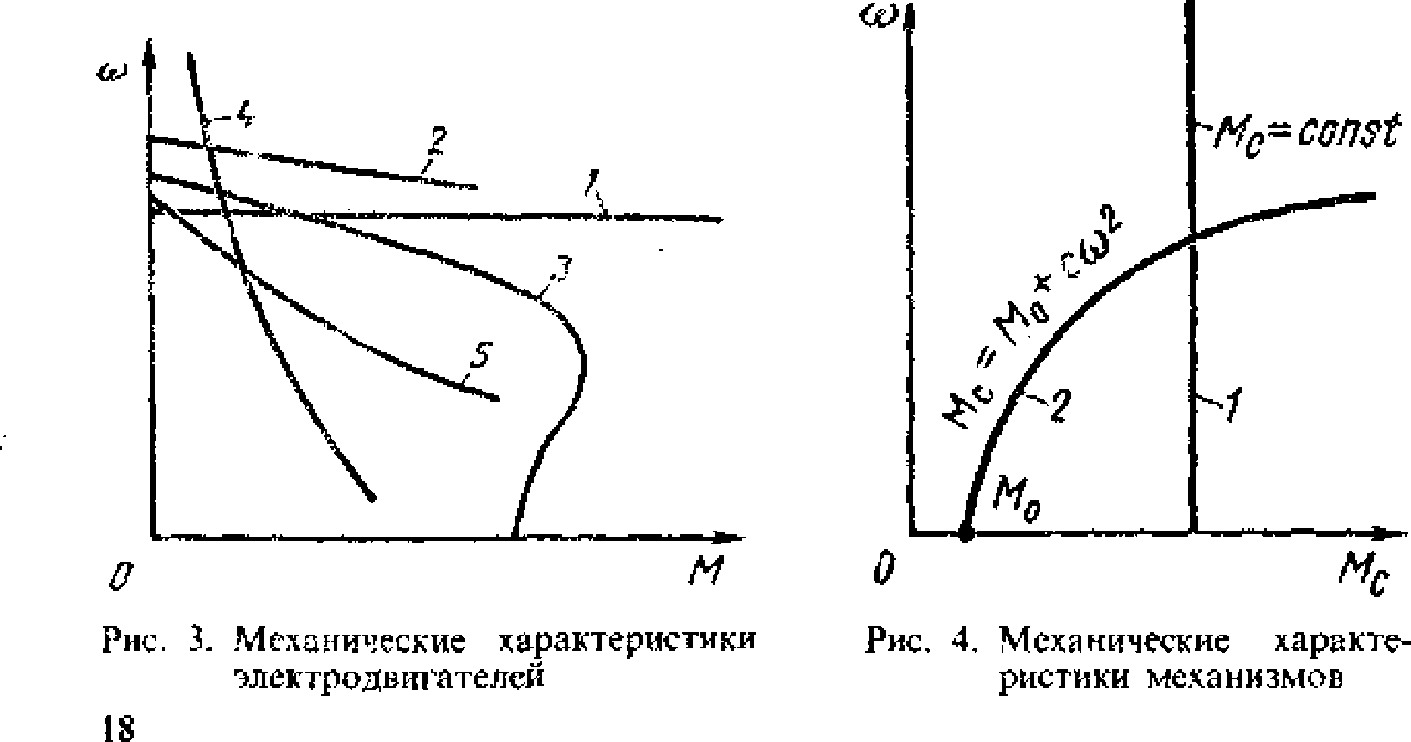
ЭД в системе Г-Д с противокомпаундной обмоткой. Механические характеристики этих ЭД таковы, что при небольшом изменении момента происходит значительное изменение их угловой скорости.
Степень жесткости механической характеристики является одним из основных электромеханических свойств ЭД.
Наряду с механическими характеристиками электромеханические свойства ЭД отражают также электромеханические характеристики, являющиеся одним из видов рабочих характеристик и представляющие собой зависимость угловой скорости ЭД от тока, протекающего по цепи его якоря или ротора: ω(I).
Механические и электромеханические характеристики ЭД разделяют на естественные и искусственные.
Естественной характеристикой называется характеристика, соответствующая работе ЭД при номинальных параметрах питающей сети, нормальной схеме подключения к ней и при отсутствии добавочных сопротивлений в цепях электродвигателя.
Каждому ЭД присуща только одна естественная характеристика.
Искусственные характеристики получаются при питании ЭД от сети с напряжением или частотой, отличающимися от номинальных, или при включении в одну из цепей ЭД добавочного резистора, или если ЭД подключен к источнику тока, по необычной схеме.

Для каждого ЭД можно создать неограниченное количество искусственных характеристик.
Работа на них происходит при пуске, регулировании частоты вращения и торможении ЭД.
4.Механические характеристики механизмов
При рассмотрении работы ЭД, приводящего в движение механизм, необходимо также принимать во внимание механическую характеристику механизма, ибо от степени их соответствия зависят условия эксплуатации двигателя.
Механической характеристикой механизма называется зависимость создаваемого им приведенного статического момента от угловой скорости ЭД: М(ω)
По характеру этой зависимости большинство судовых механизмов можно разделить на две основные группы (рис. 4):
1. Механизмы с не зависящим от угловой скорости статическим моментом (прямая 1). (крановая характеристика).
К этой группе механизмов относятся грузоподьемные лебедки, краны, лифты, поршневые насосы и компрессоры(рис 4).
2. Механизмы, у которых статический момент зависит от квадрата угловой скорости;
Механическая характеристика этих механизмов изображается в виде параболической кривой 2, не проходящей через начало координат. Их начальный статический момент обозначается через М0 и обусловлен трением в подшипниках и другими потерями.
К механизмам, обладающим такой характеристикой, называемой вентиляторной, относятся вентиляторы, центробежные насосы и гребные винты.
Сравнивая механические характеристики, нетрудно увидеть, что для механизмов с характеристикой 1 необходимы ЭД, способные
| Рис, 5, Совмешенные механические характеристики механизмов и электродвигателя |
развивать большой пусковой момент, а для механизмов с характеристикой 2 приводные ЭД могут развивать меньший момент.
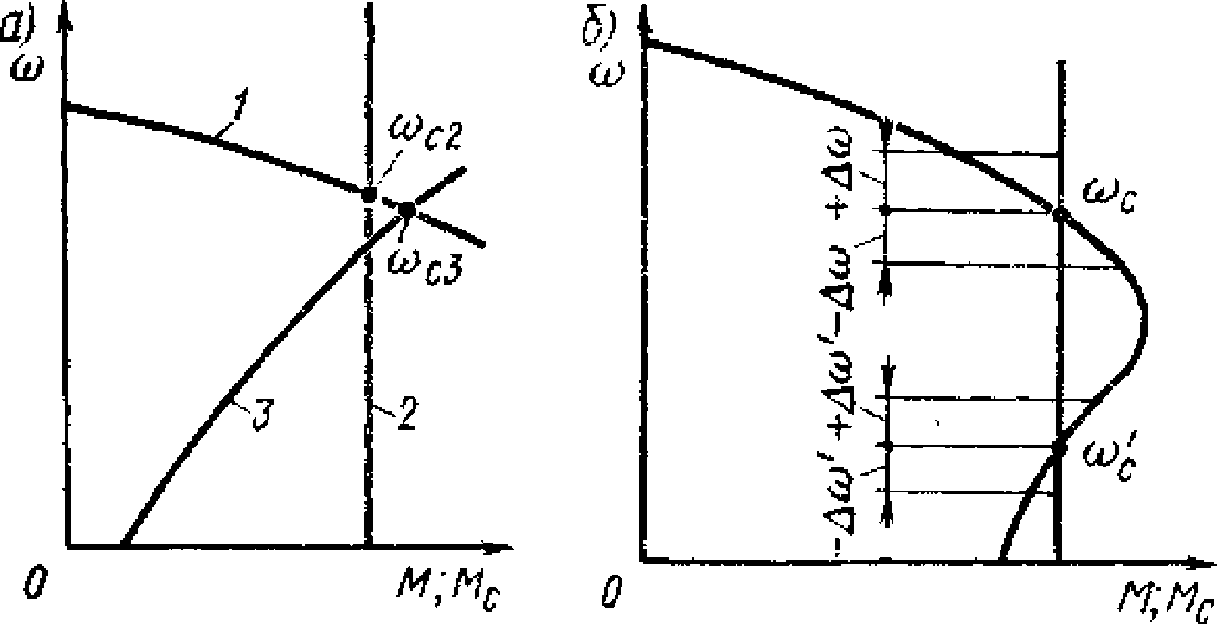
Располагая механическими характеристиками ЭД и механизма, легко найти значение угловой скорости ЭД при установившемся режиме работы привода. Поскольку в этом режиме система привода находится в состоянии равновесия, т.е. М = Мс, очевидно, что установившаяся скорость будет определяться точкой пересечения механических характеристик. Например, для характеристики I двигателя (рис. 5. а) и характеристик 2 и 3 механизмов установившимися скоростями будут ωс2 и ωс3 Если же механические характеристики ЭД и механизма не пересекаются, то установившийся режим работы привода в таком случае невозможен. Следует иметь в виду, что не в любой точке пересечения характеристик работа ЭП может быть устойчивой. Например, на рис. 5,б механические характеристики ЭД и механизма пересекаются в точках установившегося режима ωс и (ωсштрих). Однако точка (ωсштрих) соответствует неустойчивому установившемуся режиму. Положительный динамический момент при уменьшении скорости и отрицательный при ее возрастании обеспечит возврат системы привода в точку ωс.
Таким образом, вид механических характеристик ЭД и механизма существенно влияет на характер переходных процессов, и это необходимо принимать во внимание при эксплуатации ЭП.
3. Способы пуска, регулирования частоты вращения и торможения электроприводов постоянного тока.
Статический и динамический моменты
![]()
![]()
Механическая часть ЭП – ротор (якорь) ЭД, элементы механической передачи (редуктор); ИО рабочей машины.
Движение механической части ЭП подчиняется законом механики. Рассмотрим простейшую схему ЭП:
ЭД вращает точильный круг, находящийся на валу.
М – момент на валу ЭД (вращающий);
Мс – момент сопротивления ИО (создается за счет срезания слоя металла с затачиваемого инструмента) – статический момент.
Статические моменты бывают:
Активный Мс – действует всегда в одном направлении независимо от того, находится ли система в покое или движется в ту или иную сторону.
Например: момент висящего груза (см. рисунок 2.2).
Реактивный Мс – действует только при движении и направлен всегда против движения (см. рисунок 2.3).
Например: момент, создаваемый силами трения, обусловленный резаньем металла.
Чтобы ЭП вращался момент двигателя М должен преодолевать статический момент Мс. Если М≠Мс, то возникает динамический момент :
 , где
, где  – угловое ускорение.
– угловое ускорение.
J = m?r 2 [кг?м 2 ] – момент инерции всех вращающихся масс (m – масса тела, r – радиус инерции); J характеризует инертность привода.
Иногда в справочниках указывается не момент инерции J, а маховый момент (Mм) – произведение веса тела на диаметр инерции:
 , если GD 2 в [кг?м 2 ],
, если GD 2 в [кг?м 2 ],
 , если GD 2 в [Н?м 2 ]
, если GD 2 в [Н?м 2 ]
2.2 Уравнение движения электропривода
1) M>Мс, тогда  (+), →
(+), →  (+), → ускорение ЭП (скорость ω ↑)
(+), → ускорение ЭП (скорость ω ↑)
2) M=Мс, тогда  =0, → ω=const (частный случай ω=0), → ЭП вращается с постоянной скоростью;
=0, → ω=const (частный случай ω=0), → ЭП вращается с постоянной скоростью;
|
3) M механическими характеристиками производственного механизма (рисунок 2.5) :
1 – Mc = const (брус на барабане)
 2 – Mc
2 – Mc
ω (генератор постоянного тока с независимым возбуждением, работающий на R=const)
ω 2 (вентиляторы, компрессоры)
1 – Синхронный двигатель;
2 – ЭД постоянного тока независимого возбуждения;
3 – ЭД постоянного тока последовательного возбуждения;
4 – Асинхронный двигатель;
Если графики 2.5 и 2.6 совместить, то получим точку установившегося режима.
В точке А (рисунок 2.7) Мс=М, значит это точка установившейся работы (со скоростью ωуст)
2.4 Жесткость характеристики
1 – абсолютно жесткая (СД)
2 – жесткая (ДПТ НВ, АД)
3 – мягкая (ДПТ ПВ, АД с добавочным сопротивлением в цепи ротора)
4 – абсолютно мягкая (груз на валу)
2.5 Приведение статических моментов и моментов инерции
Элементы механической части ЭП связаны между собой и оказывают друг на друга воздействие.
Приведение –пересчет входящих в уравнение движения сил, моментов, масс, моментов инерции к элементу, движение которого рассматривается (чаще к валу ЭД).
Для расчетов реальную систему (ЭД, редуктор, барабан, груз – см. рисунки 2.10, 2.12, 2.13) приводят в простейшую (см. рисунок 2.9, 2.11).
ПИМ – приведенный исполнительный механизм.
1) при данной скорости вращения ЭД мощность, требуемая ПИМ должна быть равна мощности реальной системы;
2) при данной скорости ЭД запас кинетической энергии ПИМ должен быть равен реальной системы.
I. Приведение Мс:
1. Вращательное движение ИМ.


– формула приведения момента сопротивления
2. Поступательное движение ИМ.
Р2=mgv – мощность, требующаяся для подъема груза

Приведенный момент сопротивления
 , где
, где  – радиус приведения
– радиус приведения
3. Двигатель через редуктор вращает барабан и поднимает груз.


где  – радиус приведения
– радиус приведения
4. Спуск тяжелых грузов.
Опускание происходит за счет веса груза. Чтобы скорость была постоянной, ЭД должен развивать тормозящий момент. Энергия передается от груза к валу двигателя (т.е. наоборот), → ЭД развивает меньший момент.
Режимы работы электропривода, динамический момент
Дата добавления: 2015-09-15 ; просмотров: 6740 ; Нарушение авторских прав
Работа электромеханической системы электропривод – исполнительный механизм происходит при взаимодействии различных сил и моментов. Один из моментов создаётся электродвигателем, он приводит систему в движение и называется электромагнитным моментом  , другие силы тормозят её (систему) и создают статический момент сопротивления – М
, другие силы тормозят её (систему) и создают статический момент сопротивления – М  . За положительное направление статического момента принимают направление, противоположное моменту двигателя.
. За положительное направление статического момента принимают направление, противоположное моменту двигателя.
Электропривод работает в двух режимах:
1.установившийсяили статическийрежим,это режим при котором скорость приводане изменяется;
2. переходныйили динамический режим, это режим при котором скорость изменяется.
Переходный режим может возникнуть в следующих случаях:
1. при изменении параметров двигателя, например, изменение сопротивления в цепи ротора; изменение числа пар полюсов статора и т.д.;
2. при изменении нагрузки механизма, например изменение подачи насоса, изменение величины сил трения якоря по грунту и т.д.;
3. при изменении параметров судовой сети, например, при уменьшении величины напряжения или частоты тока во время включения электродвигателей большой мощности.
В переходном режиме электропривод переходит от одного установившегося режима к другому, при этом изменяются скорость, момент, и ток электродвигателя.
В установившемся режиме электромагнитный момент равен статическому моменту и противоположен ему по направлению, апривод работает с постоянной скоростью.
В установившемся режиме электромагнитный момент равен статическому моменту и противоположен ему по направлению,

апривод работает с постоянной скоростью

 . (3-1)
. (3-1)
Но в случаях ускорения или замедления привода возникает инерционный илидинамический момент, который двигатель должен преодолеть. Во время преодоления динамического момента двигатель находится в переходном режиме.
В переходном режиме, к электромагнитному моменту двигателя  и статическому моменту
и статическому моменту  добавляется динамический момент
добавляется динамический момент  , равный
, равный
 , (3-2)
, (3-2)
где:  суммарный момент инерции всех элементов привода, приведенный к скорости вращения вала двигателя
суммарный момент инерции всех элементов привода, приведенный к скорости вращения вала двигателя
– угловая скорость;  – угловое ускорение.
– угловое ускорение.
Появление динамического момента объясняется действием сил инерции всех частей электропривода и исполнительного механизма.
Например, в электроприводе лебедки динамический момент появляется вследствие инерции якоря или ротора электродвигателя, шестерней редуктора, барабана лебёдки и т.д..
Динамический момент увеличивает время пуска и остановки электропривода, а так же время достижения установившейся скорости.
Для уменьшениядинамического момента в двигателях специального исполнения уменьшают диаметр ротора и одновременно увеличивают длину ротора, с целью сохранения мощности двигателя. Такие двигатели применяют в электроприводах грузоподъемных механизмов. Их применение позволяет сократить время пуска и остановки электропривода, а значит, повысить производительность грузовых лебедок и кранов.
Серии таких электродвигателей называются крановыми (название произошло от грузового крана).321cп24.01.13



