II Закон Ньютона.Динамические уравнения движения
Система отсчета, относительно которой выполняется закон Ньютона, называется инерциальной.
Второй закон Ньютона: изменение движения пропорционально приложенной силе и происходит в том направлении, в каком действует сила.
Сила – это физическая величина, характеризующая взаимодействие тел, в результате оторого тела приобретают ускорения или деформируются [F]=[Н]=[  ].
].
Но разные тела под влиянием одинаковых сил приобретают разные ускорения, следовательно, ускорение зависит не только от силы, но и от собственных свойств тел. Это свойство называется массой.
Масса – это мера инертности тела [m] = [кг].
Инертность – это способность тела приобретать ускорение.
1Н – сила, сообщающая телу массой 1кг ускорение 1м/с 2 в направлении действия силы.
Запишем второй закон Ньютона
 , (1)
, (1)
но  , следовательно,
, следовательно,
 . (2)
. (2)
Подведем m под знак дифференциала
 , но
, но
 (3)
(3)
импульс (количество движения).
[Р]=[  ] направление импульса совпадает с направлением силы.
] направление импульса совпадает с направлением силы.
Перепишем второй закон Ньютона  ;
;
 . (9)
. (9)
второй закон Ньютона через импульс
Динамические уравнения движения – это второй закон Ньютона, записанный для данного тела. Эти уравнения можно записать в векторном виде и в проекциях на оси координат. Составление и решение таких уравнений – главная задача динамики.
Движение твердого тела можно охарактеризовать двумя видами: поступательным и вращательным (из них состоит любое сложное движение).
При поступательном движении тела все его точки двигаются с одинаковыми скоростями и ускорениями. Если мысленно разбить тело наэлементами с массами Dmi, то по второму закону Ньютона получим
 , (4)
, (4)
где fi – внутренняя сила (сила взаимодействия элементов тела);
Fi – внешняя сила, действующая на каждый элемент.
По третьему закону Ньютона сумма вех внутренних сил равна 0, поэтому, суммируя выражения, получим
 (5)
(5)
 , (6)
, (6)
где  – векторная сумма всех внешних сил;
– векторная сумма всех внешних сил;
 – главный вектор внешних сил.
– главный вектор внешних сил.
Следовательно, рассмотрение поступательного движения твердого тела можно заменить рассмотрением движения одной материальной точки с массой, равной массе тела, и находящейся под действием силы, равной главному вектору внешних сил.
При сложном движении тела все его точки имеют разные скорости и ускорения. Разобьем тело на столь малые элементы, что их скорости и ускорения остаются постоянными
.
Суммируем это равенство fi = 0
 (7)
(7)
главный вектор внешних сил
Однако ускорения всех элементов тела разные, поэтому введем ускорение ас, определяемое равенством
 , (8)
, (8)
где М – масса всего тела.
Умножим левую и правую часть равенства на М, используя  , получим
, получим
 , (9)
, (9)
где ас – ускорение некоторой точкиС, координаты которой
 ;
;  ;
;  , (10)
, (10)
где С – центр масс тела или центр инерции (совпадает с центром приложения равнодействующей сил тяже).
15. Сложение двух гармонических колебаний одинаковой циклической частоты, происходящих вдоль одной прямой.
Пусть  ;
;  ;
;  .
.
Складываемые колебания описываются уравнениями:
 ; (1)
; (1)
 . (2)
. (2)
Так как колебания происходят вдоль одной прямой (вдоль оси  ), то результирующее смещение в любой момент времени равно алгебраической сумме смещений
), то результирующее смещение в любой момент времени равно алгебраической сумме смещений  и
и  :
:
 (3)
(3)
Выполним это сложение геометрически, с помощью векторов амплитуды  и
и  . На рисунке1 изображены положения векторов амплитуды в начальный момент времени. Вектор результирующей амплитуды
. На рисунке1 изображены положения векторов амплитуды в начальный момент времени. Вектор результирующей амплитуды  равен геометрической сумме векторов
равен геометрической сумме векторов  и
и  .
.
Проекции конца вектора  определяет результирующее смещение в начальный момент времени. Так как оба вектора,
определяет результирующее смещение в начальный момент времени. Так как оба вектора,  и
и  , вращаются в процессе колебаний с одной и той же угловой скоростью
, вращаются в процессе колебаний с одной и той же угловой скоростью  , с такой же скоростью будет вращаться и вектор результирующей амплитуды. Следовательно, результирующее колебание представляет собой гармоническое колебание той же частоты и происходит вдоль той же прямой. Из рисунка 1 видно, что
, с такой же скоростью будет вращаться и вектор результирующей амплитуды. Следовательно, результирующее колебание представляет собой гармоническое колебание той же частоты и происходит вдоль той же прямой. Из рисунка 1 видно, что
 ,
,
для произвольного момента времени:
 , (4)
, (4)
где  и
и  — амплитуда и начальная фаза результирующего колебания. Из
— амплитуда и начальная фаза результирующего колебания. Из  по теореме косинусов получаем:
по теореме косинусов получаем:


 (5)
(5)
так как 
 (6)
(6)
Амплитуда результирующего колебания зависит от разности фаз (  ) слагаемых колебаний. Если (
) слагаемых колебаний. Если (  ), где
), где  то
то  и
и  , т.е. если разность фаз равна четному числу
, т.е. если разность фаз равна четному числу  , колебания усиливают друг друга. Если
, колебания усиливают друг друга. Если  , то
, то  и
и  , т.е.
, т.е.
если разность фаз равна нечетному числу  , колебания максимально ослабляют друг друга. В зависимости от разности фаз амплитуда колебания может принимать любые значения, лежащие в интервале:
, колебания максимально ослабляют друг друга. В зависимости от разности фаз амплитуда колебания может принимать любые значения, лежащие в интервале:
 .
.
Динамические уравнения Эйлера


Динамические уравнения Эйлера
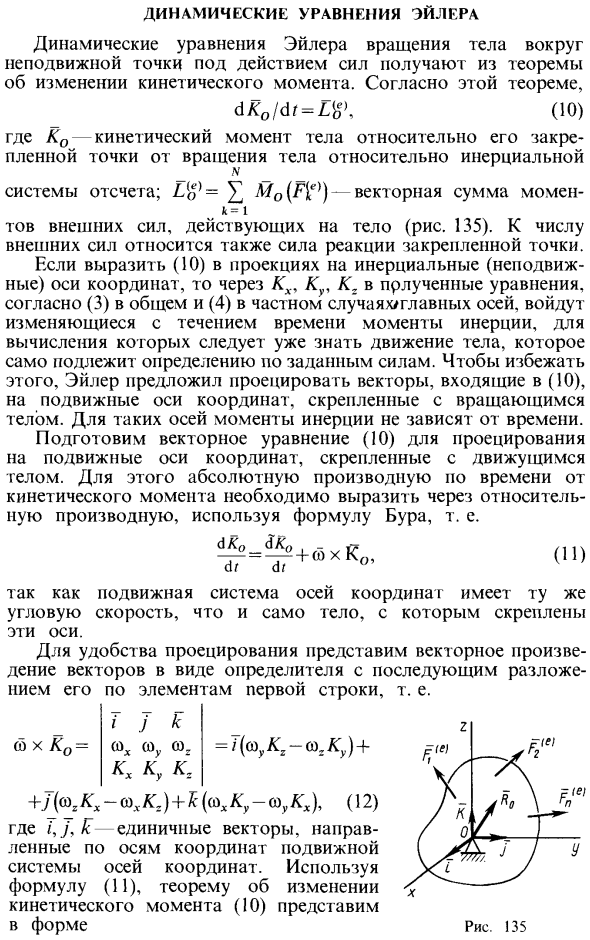
Когда (10) представляется проекцией на инерциальную (фиксированную) координатную ось, моменты, которые меняются со временем, в зависимости от конкретного случая основных (3) и (4) главных осей, через Kx, Ku, K В том числе обычное уравнение инерции. Это расчет, который уже должен знать движение тела, и сам должен определяться силой, данной. Чтобы избежать этого, Эйлер предложил проецировать вектор (10) на движущуюся ось координат, прикрепленную к вращающемуся телу.
Это связано с тем, что система перемещения осей координат имеет ту же угловую скорость, что и само тело, с которым эти оси связаны. Представлено векторное поколение для удобства проецирования Удалить вектор в виде определителя, затем развернуть до элементов первой строки, т.е. | J K I шхко = тсс шу юг = / (шу ^ 1-шхх) + | к * к, кг я + j (azKx-axKz) + H (axKy-ayKx), (12) где i, j и H — единичные векторы, ориентированные вдоль осей координат движущейся системы координат.
В разделе упражнений будет показано, что систему векторов можно всегда привести к таким двум векторам, из которых Ъдин лежит на произвольной прямой, не параллельной главному вектору. Людмила Фирмаль
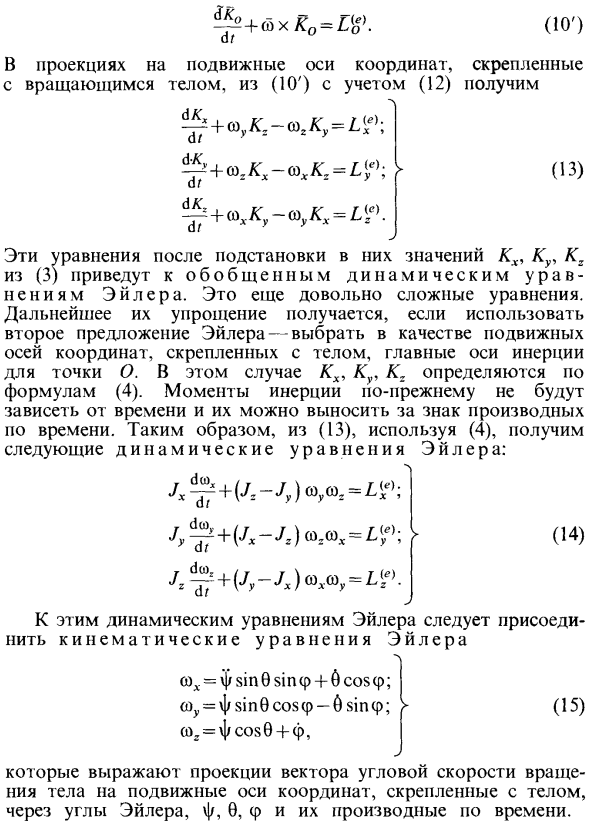
Используйте уравнение (I) для выражения теоремы об изменении момента движения (10) в следующем виде: Рисунок 135 В проекции на ось подвижной координаты, прикрепленной к вращающемуся телу, с учетом (10 ‘) — (12), ^ + — (15) sog = f cos6 4-f, Это представляет проекцию угловой скорости вращения объекта на движущиеся координатные оси, прикрепленные к объекту через углы Эйлера f, 6, f и их производные по времени.
Образовательный сайт для студентов и школьников
Копирование материалов сайта возможно только с указанием активной ссылки «www.lfirmal.com» в качестве источника.
© Фирмаль Людмила Анатольевна — официальный сайт преподавателя математического факультета Дальневосточного государственного физико-технического института
Второй закон Ньютона. Динамические уравнения движения
Второй закон Ньютона – основной закон динамики. Этот закон выполняется только в инерциальных системах отсчета.
Приступая к формулировке второго закона, следует вспомнить, что в динамике вводятся две новые физические величины – масса тела m и сила  а также способы их измерения. Первая из этих величин – масса – является количественной характеристикой инертных свойств тела. Она показывает, как тело реагирует на внешнее воздействие. Вторая – сила
а также способы их измерения. Первая из этих величин – масса – является количественной характеристикой инертных свойств тела. Она показывает, как тело реагирует на внешнее воздействие. Вторая – сила  – является количественной мерой действия одного тела на другое.
– является количественной мерой действия одного тела на другое.
Второй закон Ньютона – это фундаментальный закон природы; он является обобщением опытных фактов, которые можно разделить на две категории:
Обобщая подобные наблюдения, Ньютон сформулировал основной закон динамики:
Сила, действующая на тело, равна произведению массы тела на сообщаемое этой силой ускорение:
|

Это и есть второй закон Ньютона. Он позволяет вычислить ускорение тела, если известна его масса m и действующая на тело сила :
 |
 |
Если на тело одновременно действуют несколько сил (например, 
 и
и  то под силой
то под силой  в формуле, выражающей второй закон Ньютона, нужно пониматьравнодействующую всех сил:
в формуле, выражающей второй закон Ньютона, нужно пониматьравнодействующую всех сил:
 |
 |
Рисунок 1.8.1. Сила – равнодействующая силы тяжести  и силы нормального давления и силы нормального давления  действующих на лыжницу на гладкой горе. Сила вызывает ускорение лыжника действующих на лыжницу на гладкой горе. Сила вызывает ускорение лыжника |
Если равнодействующая сила  то тело будет оставаться в состоянии покоя или равномерного прямолинейного движения. Таким образом, формально второй закон Ньютона включает как частный случай первый закон Ньютона, однако первый закон Ньютона имеет более глубокое физическое содержание – он постулирует существование инерциальных систем отсчета.
то тело будет оставаться в состоянии покоя или равномерного прямолинейного движения. Таким образом, формально второй закон Ньютона включает как частный случай первый закон Ньютона, однако первый закон Ньютона имеет более глубокое физическое содержание – он постулирует существование инерциальных систем отсчета.
Второй закон Ньютона[править | править вики-текст]
Основная статья: Второй закон Ньютона
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этогоускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО).
Современная формулировка[править | править вики-текст]
| В инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе. |
При подходящем выборе единиц измерения, этот закон можно записать в виде формулы:

где  — ускорение материальной точки;
— ускорение материальной точки;
 — равнодействующая всех сил, приложенных к материальной точке;
— равнодействующая всех сил, приложенных к материальной точке;
 — масса материальной точки.
— масса материальной точки.
Второй закон Ньютона может быть также сформулирован в эквивалентной форме с использованием понятия импульс:
В инерциальной системе отсчета скорость изменения импульса материальной точки равна равнодействующей всех приложенных к ней внешних сил.  |
Замечания[править | править вики-текст]
Когда на материальную точку действуют несколько сил, с учётом принципа суперпозиции, второй закон Ньютона записывается в виде:


Второй закон Ньютона, как и вся классическая механика, справедлив только для движения тел со скоростями, много меньшими скорости света. При движении тел со скоростями, близкими к скорости света, используется релятивистское обобщение второго закона, получаемое в рамках специальной теории относительности.
Следует учитывать, что нельзя рассматривать частный случай (при  ) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
) второго закона как эквивалент первого, так как первый закон постулирует существование ИСО, а второй формулируется уже в ИСО.
В уравнении движения динамической системы входит полный набор переменных, определяющий состояние этой системы (например, все координаты и скорости, или все координаты и импульсы), а также их производные по времени, что позволяет, зная такой набор в некий момент времени, вычислить его для момента времени, отстоящего на малый (бесконечно малый) промежуток времени. В принципе, повторяя этот процесс вычисления последовательно большое (бесконечное) количество раз, можно вычислить значение всех этих переменных для момента времени, как угодно далеко [2] отстоящего от начального. С помощью такого процесса можно (выбрав  достаточно малым, но конечным) получить приближённое численное решение уравнений движения. Однако чтобы получить точное [3] решение, приходится применять другие математические методы.
достаточно малым, но конечным) получить приближённое численное решение уравнений движения. Однако чтобы получить точное [3] решение, приходится применять другие математические методы.
В современной квантовой теории термин уравнение движения нередко используется для обозначения именно только классических уравнений движения, то есть как раз для различения классического и квантового случая. В таком употреблении, например, слова «решение уравнений движения» означают именно классическое (неквантовое) приближение, которое может затем так или иначе использоваться при получении квантового результата или для сравнения с ним. В этом смыслеуравнения эволюции волновой функции не называют уравнениями движения, например упомянутые ниже уравнение Шредингера и уравнение Дирака нельзя назвать уравнением движения электрона. Определённую ясность тут вносит дополнение, указывающее на то, об уравнении движения чего идёт речь: так, хотя уравнение Дирака нельзя назвать уравнением движения электрона, его можно, даже в смысле, обсуждаемом в этом абзаце, назвать классическим уравнением движения спинорного поля.
Дата добавления: 2016-01-29 ; просмотров: 4451 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Смысл динамических уравнений
Попытаемся теперь понять, что же означает уравнение (9.12). Пусть в данный момент времени t тело находится в точке х и движется со скоростью vх. Каково будет его положение и скорость спустя небольшой промежуток времени, т. е. в момент t + ε? Если мы сможем ответить на этот вопрос, то проблема решена, так как, исходя из начальных условий, т. е. положения и скорости в некоторый начальный момент времени, можно сказать, как они изменяются в первый момент, а зная положение и скорость в первый момент, можно найти их и в следующий и т. д. Таким образом, шаг за шагом выстраивается вся картина движения. Для большей определенности предположим, что в момент t = 0 положение грузика х = 1, а его скорость vx = 0. Почему вообще движется грузик? Да потому, что на него в любом положении, за исключением положения равновесия х = 0, действует сила. Если х > 0, то эта сила направлена вверх. Следовательно, скорость, которая вначале была нулем, благодаря уравнениям движения начинает изменяться. Но как только скорость начинает возрастать, грузик приходит в движение. Для любого момента времени t при очень малом е можно с достаточно хорошей точностью найти положение в момент t + ε через скорость и положение в момент t:
 |
Конечно, это выражение тем точнее, чем меньше ε, но оно может быть достаточно точным, даже когда интервал ε не исчезающе мал. Что теперь можно сказать о скорости? Чтобы определить скорость в момент t + ε, очевидно, нужно знать, как она изменяется со временем, т. е. нужно знать ускорение. А как узнать его? Вот здесь-то нам на помощь приходят уравнения динамики. Именно они позволяют определить, чему равно ускорение. В нашей задаче уравнение динамики говорит, что ускорение равно —х. Поэтому
 |
Уравнение (9.14) еще кинематическое; оно просто говорит о том, что из-за наличия ускорения скорость изменяется. Однако уравнение (9.15) уже динамическое, потому что оно связывает ускорение с силой. Оно говорит, что в данной частной задаче для данного момента времени ускорение можно заменить на —х (t). Следовательно, если в какой-то момент времени нам известны положение х и скорость vx, то мы знаем и ускорение, которое дает возможность найти скорость в следующий момент, а скорость в свою очередь определяет новое положение и т. д. Вот каким образом действует весь этот динамический механизм! Действующая сила немного изменяет скорость, а скорость приводит к небольшому изменению положения.



