Что такое сервопривод, как он работает и как им управлять?
Вряд ли сегодня кого-то можно удивить тем количеством электрических приборов, которые окружают человека в повседневной жизни. Многие из которых давно взяли на себя часть человеческого труда и обязанностей. Повсеместная автоматизация процессов охватила самые разнообразные отрасли, начиная автомобилестроением, и заканчивая устройствами в быту. Львиную долю нагрузки относительно автоматического управления параметрами работы умных машин берет на себя сервопривод.
Что такое сервопривод?
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
Устройство и принцип работы
Устройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства. Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем
Вполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
Назначение
Сервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
По принципу действия выделяют:
По материалу передаточного механизма:
По типу вала двигателя:
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
Способы управления
По способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Их практическое отличие заключается в наличии мертвых зон у аналоговых способов, цифровые лишены этого недостатка, к тому же они быстрее реагируют на изменения и обладают большей точностью. Однако цифровой способ управления имеет большую себестоимость и на свою работу он расходует больше электроэнергии.
На рисунке 8 приведен пример управления сервоприводом с помощью подаваемых импульсов:
 Рис. 8. Схема управления сервоприводом
Рис. 8. Схема управления сервоприводом
Как видите на рисунке, сигнал поступает к генератору опорных импульсов (ГОП), подключенному к потенциометру. Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.
Преимущества и недостатки
К преимуществам сервопривода следует отнести:
К недостаткам следует отнести:
Сервопривод или шаговый двигатель: какова разница и что выбрать?

В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
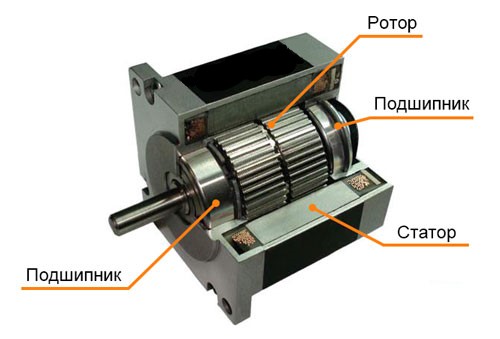
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс | Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене | Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
| Точность перемещений исполнительного органа | ||
| Реакция на принудительную остановку | Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках | Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
| Стоимость | За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену | За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
cnc-club.ru
Статьи, обзоры, цены на станки и комплектующие.

Сообщение odekolon » 16 авг 2018, 14:39
ну про недостатки понятно, момент будет падать от оборотов, с этим ничего не поделаешь
а вот как с достоинствами?
ну пропуска шагов не будет, это понятно,
а вот как с резонансом?
— для борьбы с ним применяют микрошаг, ну и драйвера «умные»
а у «гибридов» как?
вытянет ли «гибрид» большие обороты чем просто шаговик?
кто нибудь подобное испльзовал?

Сообщение MX_Master » 16 авг 2018, 15:28
Пропуски шагов будут, но теперь драйвер будет об этом знать, чтоб в случае чего, сообщить ЧПУ об ошибке. Мелкие пропуски драйвер может решить сам.
Сообщение NikolayUa24 » 16 авг 2018, 15:34
Сообщение odekolon » 16 авг 2018, 15:36
а вот где граница «мелкий»- не мелкий»?
Сообщение MX_Master » 16 авг 2018, 15:42
Сообщение aftaev » 16 авг 2018, 16:00
Сообщение odekolon » 16 авг 2018, 21:38
Сообщение aftaev » 16 авг 2018, 22:02
Сообщение AAN » 17 авг 2018, 07:12

Сообщение Сергей Саныч » 17 авг 2018, 11:10
Что такое гибридный серводвигатель
Каталог продукции
Дополнительно
Руководства и инструкции
Статьи
Кто на сайте?
Сейчас на сайте 121 гость и нет пользователей
Сравнение шаговых и серводвигателей
В работе фрезеров используются два типа двигателя: шаговый – электромеханическое устройство, преобразующее сигналы в угловое перемещение ротора с фиксацией в заданном положении. И серводвигатели – имеющие обратную связь, и которыми можно управлять через цепь контроллера путём увеличения и уменьшения тока. Шаговые имеют меньшую мощность и скорость, и значительно дешевле серводвигателей.
Как правило, шаговый электродвигатель – это электромеханическое устройство, которое преобразует сигналы управления в угловое перемещение его ротора с качественной фиксацией в заданном положении. Сегодня современные шаговые двигатели (ШД), по сути, являются синхронными двигателями, не имеющими пусковую обмотку на роторе, что соответственно объясняется частотным пуском самого ШД. Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
Шаговый двигатель относится к классу так называемых «бесколлекторных» двигателей постоянного тока. Такие двигатели как непосредственно и любые другие бесколлекторные электрические машины, имеют достаточно высокую надежность и весьма внушительный срок службы, что в свою очередь позволяет применять их в самых разных индустриальных сферах. Если сравнивать обычные электродвигатели постоянного тока с шаговыми двигателями, то последние требуют более сложных схем управления, выполняющие абсолютно все коммутации обмоток.
Сегодня существуют три основных типа/вида шаговых двигателей:
Гибридные шаговые двигатели
Считается, что гибридные двигатели совмещают в себе наилучшие черты ШД с переменным магнитным сопротивлением, а также двигателей с постоянными магнитами. У гибридного двигателя ротор имеет зубцы, которые расположены в осевом направлении. Шаговые гибридные двигатели обеспечивают более меньшую величину шага, большую скорость и больший момент, чем двигатели других типов/видов. Обычно, число шагов для гибридных двигателей может составлять от 100 до 400 (при этом угол шага 3.6 – 0.9о).
Строение шаговых двигателей
Шаговый электрический двигатель состоит из статора, где расположены обмотки возбуждения (т. е. катушки электромагнитов) и соответственно ротора с постоянными магнитами (также используются роторы с переменным магнитным сопротивлением – но реже). ШД с магнитным ротором позволяют обеспечивать фиксацию ротора при обесточенных обмотках и получать больший крутящий момент. Именно благодаря этому, шаговые двигатели достаточно часто применяются в станках с ЧПУ.
Достаточно высокая температура, которая создана в катушках, способна легко рассеяться через массу самого двигателя, таким образом, шаговые электродвигатели от нагрева менее подвержены повреждениям.
Принципы работы шагового двигателя
Как правило, в соответствии с тем, какие именно катушки статора выключены или включены, ротор будет вращаться, чтобы так сказать «подстроиться» к магнитному полю. Например, если представить ШД с двумя катушками в статоре, а в качестве ротора постоянный магнит, то когда соответствующие катушки статора достаточно возбуждены, постоянно намагниченный ротор обязательно повернется, чтобы с магнитным полем статора «выстроиться» в линию. Ротор останется в данном положении, если поле соответственно не вращается.
Когда к этой катушке не будет поступать энергия, а будет направлена непосредственно к следующей катушке, то ротор снова повернется, чтобы подстроиться к полю новоиспеченной позиции. При этом абсолютно каждый поворот обязательно соответствует углу шага, который в свою очередь может измениться от 180о до доли градуса (т. е. до 60о). Затем, в то время когда вторая катушка выключена, включается следующая. Это заставит повернуться ротор на следующий шаг, причем в том же направлении. Данный процесс продолжается до тех пор, пока одна катушка включается, а соответственно другая выключается.
Последовательность шести шагов возвратит ротор в то же состояние, какое было в самом начале последовательности. Теперь если представить, что при завершении первого шага, вместо включения одной катушки и выключения второй – обе катушки были бы включены. В таком случае, ротор повернется только лишь на 30о (т. е. всего на половину от 60о), чтобы выровняться в направлении наименьшего сопротивления. Таким образом, если первая катушка включена, в то время когда вторая выключена, ротор должен повернуться еще на 30о. Называется это действием полушага, что непосредственно включает последовательность восьми движений.
Во время противоположной последовательности выключений/включений, ротор будет совершать обороты в противоположном направлении. В промышленности наиболее применим именно шаговый мотор, который продвигается на угол от 1.8о и до 7.5,о при полном шаге. Для того чтобы размер шагов уменьшить, число полюсов необходимо увеличить. Однако при этом есть физический предел, сколько непосредственно полюсов могут использоваться.
Чтобы снизить дискретность перемещения ротора ШД применяется, как правило – микрошаговый режим. Непосредственно сам микрошаг реализуется при автономном управлении током обмоток шагового двигателя. Управляя соотношением токов находящихся в обмотках, ротор можно зафиксировать между шагами в промежуточном положении. Таким образом, можно увеличить плавность вращения ротора, а также достичь высокой точности позиционирования. Кроме того, в микрошаговом режиме разрешающую способность можно получить в 51200 шаг/об, что положительно отразиться на работе оборудования в целом.
Механическая характеристика шагового двигателя
Очень важной особенностью ШД является, конечно же, их механическая характеристика.
Управление шаговым приводом
Управление шаговым двигателем в самом общем виде сводится к задаче отработать обусловленное число шагов в потребном направлении и с необходимой скоростью.
Данные импульсы можно получить непосредственно от компьютера, к примеру, от LPT-порта, от специализированного контроллера управления шаговыми приводами или же задавать сигналы независимо от генератора 5В или источника питания.
Как правило, работой ШД управляет электронная схема, а его питание выполняется от источника постоянного тока. ШД используют для управления частотой вращения, чтобы не применять дорой контур обратной связи. Данный привод применяется в приводе исключительно с разомкнутой цепью.
Серводвигатели
Серводвигатель – это непосредственно двигатель с обратной связью, которой можно управлять, чтобы или достичь требуемой скорости (следовательно, крутящего момента) или же получить необходимый угол поворота. Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении. Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Для этого могут использоваться разные типы/виды датчиков, включая кодирующие устройства, например, такие как: потенциометры, тахометры и резольверы. Если применяется датчик положения типа кодирующего устройства или потенциометра, его сигнал вполне может быть дифференцирован для того, чтобы выработать определенный сигнал о скорости.
На сегодняшний день сервоприводы используются в высокопроизводительном оборудовании, к примеру, в таких производственных отраслях как: изготовление различных стройматериалов, напитков, упаковки, в полиграфии и подъемно-транспортной технике. Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Решающим фактором использования сервоприводов является не только высокая их динамика, но и возможность получить высокостабильное или точное управление, широкий диапазон регулирования скорости, малые габариты и вес, а также помехоустойчивость.
Принципы работы серводвигателя
Серводвигатели функционируют вместе с устройствами, которые называются преобразователи (приводы или драйвера серводвигателей). Данные преобразователи меняют напряжение на обмотке возбуждения (или на якоре) сервомотора в зависимости от непосредственной величины напряжения на входе самого двигателя. Вся эта система, как правило, управляется стойкой ЧПУ (СNC). Далее схематично представлена система с сервомотором. Непосредственно под «усилителем» понимается драйвер серводвигателя.
Математическое обеспечение стойки ЧПУ, как правило, устроено таким образом, что стойка «располагает сведениями», что: расстоянию в 10 мм соответствует, к примеру, 10 000 импульсов от энкодера. Следовательно, пока стойка станка не примет эти 10 000 импульсов, то на вход драйвера будет передаваться напряжение задания, то есть будет вырабатываться – рассогласование. Когда портал станка пройдет заданные 10 мм, стойка станка свои 10000 импульсов получает в полном объеме, поэтому напряжение на входе драйвера серводвигателя станет равным (0) «нулю», двигатель остановится, и станок отлично отработает строго 10 мм (причем при абсолютном отсутствии люфтов).
Если под каким-либо воздействием произойдет смещение портала станка – энкодер сразу выдаст импульсы. Данные импульсы будут сосчитаны стойкой, а затем она выдаст напряжение рассогласования непосредственно на драйвер, который повернет якорь двигателя на очень малый угол, чтобы рассогласование равнялось нулю. Таким образом, портал станка отлично удерживается возле заданной ему точки с достаточно высокой точностью.
Также нужно заметить, что далеко не каждый двигатель может поворачиваться на очень малые углы, обеспечивать нужный крутящий момент, динамику разгона и т. д. Это основная причина из-за чего сервоприводы относятся к дорогостоящим устройствам.
Синхронные серводвигатели
Синхронные серводвигатели – трехфазные синхронные электродвигатели с датчиком положения ротора, (т. е. AC-двигатели) и возбуждением от постоянных магнитов. Основным их достоинством является достаточно низкий момент инерции ротора по отношению к крутящему моменту, что в свою очередь позволяет реализовать высокое быстродействие. Всего лишь за десятки миллисекунд достигается разгон на номинальную частоту вращения и реверс с полной скоростью в пределах 1-го оборота вала двигателя.
Как правило, основная область применения данных двигателей является приводы подач станков, а также технологические установки с временным циклом менее 1 секунды (к примеру, быстродействующие позиционные системы самодействующих складов, производство упаковки).
Для сервоприводов характерны такие показатели как:
Шаговые двигатели или серводвигатели: выбор двигателей для фрезерно-гравировального станка
Прежде всего, нужно сравнить два вида этих моторов по некоторым параметрам:
Срок службы и обслуживания
Шаговые двигатели – бесщеточные, поэтому единственными изнашиваемыми деталями в конструкции являются подшипники (изначально очень надежная конструкция). Это позволяет считать их двигателями высокой надежности и не требующих обслуживания долгий срок.
Дешевые модели сервоприводов коллекторного типа (со щетками) менее надежны, чем шаговые двигатели и требуют замены щеток примерно через 5000 часов непрерывной работы.
Большинство современных бесколлекторных сервоприводов от известных японских производителей отличаются высокой надежностью (близкой к надежности шаговых двигателей).
Порча подшипников происходит очень редко. Может сгореть обмотка статора. Дешевле купить новый двигатель.
Ремонтопригодны только самые дорогие модели. Проще двигатель сразу менять.
При хорошей механике точность не ниже +/- 0.01 мм
У высококачественных сервоприводов точность не ниже +/- 0.002 мкм. Такая точность достижима в случае использования сервоприводов контурного управления (точно обрабатывающих заданную траекторию). Нельзя использовать сервопривода для позиционного управления, так как они иногда дают погрешность значительно превышающую, погрешность в шаговых двигателях!
Скорость перемещения, мощность
В гравировально-фрезерных станках используя шаговые двигатели можно добиться скорости 20 – 25 метров в минуту. При увеличении скорости шаговые двигатели сильно теряют в крутящем моменте.
С использованием сервоприводов в станках с ЧПУ возможно достижение скоростей до 60 м/мин и более.
до 120 об/мин за секунду
до 1000 об/мин за 0,2 секунды
Эффект потери шагов при повышении скорости и нагрузки
На скоростях выше номинальных и повышенных нагрузках начинает проявляться эффект потери шагов (смотрите выше график возможной нагрузки от скорости вращения двигателя – механическую характеристику). Потеря шагов возможна также в случае каких либо внешних воздействий: ударов, вибраций, резонансов и т.п.
Современные системы управления шаговыми двигателями позволяют избавиться от этого общего недостатка шаговых двигателей.
Принудительная остановка (столкновение с препятствием)
Принудительная остановка шагового двигателя не вызывает у него никаких повреждений
В случае принудительной остановки серводвигателя, драйвер мотора должен правильно среагировать на данную остановку. В противном случае по обратной связи подается сигнал на доработку не пройденного расстояния, повышается ток на обмотках, двигатель может перегреться и сгореть!
Шаговые двигатели значительно дешевле серводвигателей, особенно шаговые двигатели китайского производства.
Чисто конструктивно (датчик положение, более сложный, чем у шагового двигателя, драйвер) серводвигатели дороже шаговых. К тому же, я не встречал в своей практике дешевых китайских серводвигателей.
Шаговый двигатель и сервопривод абсолютно не являются конкурентами, так как каждый занимает исключительно свою предопределенную нишу.
Сравнение работы простого Серво и Шагового двигателей:
Для понимания различия между обычным шаговым и серво двигателем давайте рассмотрим работу системы именно с шаговым мотором, на котором непосредственно стоит энкодер (шаговый серводвигатель).
Контроллер выдал команду на какое-то количество шагов – повернуть вал. В обычном шаговом двигателе контроллер не в курсе, насколько конкретно шагов повернулся вал (т. к. у него отсутствует обратная связь). Просто он «считает», что вал повернулся правильно. А ведь бывает, что двигатель не смог повернуть вал или силы не хватило или по другой какой-либо причине. Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
В серводвигателе же подобная проблема полностью отсутствует. Контроллер дал команду вал повернуть настолько-то импульсов и ожидает покуда с энкодера придет сигнал, который подтвердит, что вал повернулся на необходимое число импульсов. При этом если с энкодера поступил, хотя бы на 1 импульс меньше, контроллер все равно будет продолжать подавать команду, пока с энкодера не поступит последний импульс, который выровняет соотношение истинного и заданного количества импульсов. Либо же по истечении заданного периода времени, контроллер выдаст специальный сигнал «Ошибка перемещения».
В сервоприводе удержание осуществляется исключительно за счет тока, протекающего непосредственно через обмотку двигателя. При этом в момент удержания половины периода ток поступает в одном направлении, а вторую половину оставшегося времени в ином направлении. Именно за счет этого происходит удержание якоря. В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
Преимущества шагового двигателя:
— Шаговые двигатели существенно дешевле, нежели серводвигатели.
— Простота конструкции, а значит и простота ремонта.
— Простота системы управления (подходят практически все программы написанные для CNC станков).
Преимущества серводвигателя:
— Бесшумность и плавность работы в некоторых случаях делают сервоприводы единственным возможным вариантом для работы.
— Надежность и безотказность: возможность применения в ответственных устройствах.
— Высокая точность и скорость перемещений доступны также и на низких скоростях.- Способность двигателя может выбираться пользователем непосредственно от того какую конкретно задачу необходимо выполнить.
Выводы:
Ограничением в использовании шаговых двигателей являются мощность и соответственно скорость, однако по практике, их применение целиком оправданно в недорогих станках имеющих систему ЧПУ, предназначенных для обработки дерева, ДСП, МДФ, пластиков, легких металлов и прочих материалов средней скорости, необходимости производителей станков с ЧПУ по точности и по скорости. Если по каким-либо причинам такие параметры не устраивают, то, как правило, используют сервоприводы. Но стоит заметить, что при этом резко и, причем значительно поднимается стоимость конструкции в целом.
Если смотреть с другой стороны, то достичь реальной экономии времени обработки и даже при скоростных сервоприводах, можно за счет экономии на переходах и соответственно оптимизации путей обработки. В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
Достоинства сервопривода таковы, что использовать их можно было бы постоянно, когда только возможно, конечно если бы не два существенных недостатка: цена самого комплекта (т. е. блок управления + сервомотор) и сложность настройки, которая временами делает применение сервопривода совершенно – необоснованным.
В каких случаях необходимы сервоприводы:
В остальных же случаях наиболее чаще приобретают машины именно с шаговыми двигателями – просто это наиболее практичнее.



