Управление, основные понятия и определения. Классификация объектов управления. Основные свойства и характеристики объектов и систем. Исследование устойчивости нелинейных систем с помощью фазовых портретов. Абсолютный критерий Попова. Оптимальные системы АУ. САУ с эталонной моделью
Страницы работы

Содержание работы
Под управлением понимается совокупность действий выработанных на основании полученной информации и направленных на поддержание или улучшение функционирования объекта в соответствие с поставленной целью и алгоритмом управления.
Алгоритмом управления – называется совокупность предписаний определяющих характеристическое управляющее воздействие на объект для выполнения алгоритма функционирования.
Алгоритм функц.- совокупность предписаний ведущих к правильному выполнению технологического процесса.
Предмет изучения ТАУ явл объект управления и система управления.
 Объекты ТОУ характериз. след. параметрами: входными и выходными режимами
Объекты ТОУ характериз. след. параметрами: входными и выходными режимами
Входными параметрами наз. материальные и входные и энергетические потоки. Если есть возможность изменить или измерить вх. параметр, то он называется вх. воздействием.
Режимными параметрами наз. параметры характеризующие протекание процесса внутри объекта или оборудования.
Вых. процессами наз. характеризуют качественное и количественное состояние готовой продукции на выходе из объекта.
1 по типу технологического процесса бывают: гидравлические, тепловые, энергетические, механические и химические.
4 по количеству уравнений статистические и динамические, существуют одномерные и многомерные объекты, когда одна вых. вел-на и объект управл. описываются одним ур-ем. статики и одним ур-ем динамики
Многомерные объекты когда несколько вых вел-н и число ур-ий статики и динамики соответствует числу выходов.
Бывают объекты с независимыми вых параметрами, когда одна вых вел-на влияет только на одну выходную.
Бывают объекты с независимыми вых параметрами, когда одна вых вел-на влияет только на одну выходную.
И объекты у которых одна выходная вел-на зависит от нескольких входных
5 по характеру параметров управления бывают объекты со средоточенными параметрами, когда регулируемая вел-на имеет регулируемые числовые значение и объекты с распределенными параметрами когда регулируемая вел-на имеет регулируемые числовые значения.
3. 3. Свойства объектов управления
Основными свойствами объекта являются: самовыравнивание, емкость, запаздывание.
1) Самовыравнивание – хар-ет его устойчивость и определяется как св-во объекта самостоятельно устанавливаться в равновесное состояние после любого изменения вх вел-ны. То есть изменение вх вел-ны приводит к изменению вых со скоростью уменьшающейся до 0.
Количественно самовыравнивание выражается степенью самовыравнивания под которой понимают отношение изменения вх вел-ны к изменению вых вел-ны объекта по достижению им равновесного состояния.(r=Dх/Dy)
Чем больше степень самовыравнивания тем он более прост с точки зрения управления.
2) Емкость объекта присуще всем динамическим или реальным объектам и хар-ет их инерционность(степень влияния вх вел-ны на изменение вых).
Под емкостью понимают такое изменение вх вел-ны, которое приводит к изменению вых вел-ны объекта на единицу за единицу времени. C=X/(dy*k/t)
Чем больше С тем труднее объект в управлении.
3) запаздывание объекта выражается в том, что его вых вел-на начинает изменяться не сразу после возмущения, а через некоторый промежуток времени который называется временем запаздывания и обозначается t (t=l/s)
4. 4. Основные свойства и характеристики объектов и систем
Делятся на статические и динамические.
1)Статической называют зависимость вых параметра от вх в установившемся режиме. X=f(t)
Статистические характеристики бывают линейные и нелинейные. Линейные описывают описываются линейными алгебраическими уравнениями.(y=kx+b)Нелинейные статические хар-ки описывают нелинейными алгебраическими выражениями.(y=x 2 )
Динамической характеристикой называется зависимость выходных параметров от входных с течением времени. Y(t)=f[x(t)]. Динамические характеристики бывают временные и частотные.
Временные и частотные динамические хар-ки.
Переходная ф-ия или процесс это реакция объекта на возмущение типа скачек.
Скачком называется ф-ия Хевисайда и описывается ур-ем
Объекты управления и их свойства




![]()
![]()
Объекты управления являются теми основными элементами системы управления и регулирования, в которых при помощи технических средств автоматики должен осуществляться заданный или предписанный алгоритм функционирования. Объектом управления может быть машина, набор машин или сооружение, которые предназначены для выполнения технологического процесса, целью которого является получение определенной продукции или энергии. В состав объекта управления может также входить внешняя среда, если она оказывает существенное влияние на состояние объекта. Особенность объекта управления заключается в том, что в нем происходит преобразование, передача или накопление энергии или вещества.
Подведенная из вне энергия или вещество изменяют состояние объекта, которое прежде всего характеризуется изменением его параметров.
Для изменения подводимой энергии или вещества к объекту, последний обязательно имеет регулирующий орган.
Объект можно считать управляемым, если он характеризуется следующими признаками:
а) в нем происходит преобразование, передача или накопление энергии или вещества;
б) если он имеет регулирующий орган для изменения потока энергии или вещества;
в) приток энергии или вещества изменяет состояние объекта, которое характеризуется изменением одного или нескольких параметров, определяющих алгоритм функционирования и составляющих цепь управления.
Воздействие на объект управления может осуществляться как на стороне поступления энергии или вещества, так и на выходе их из объекта. Обычно воздействие на объект управления определяют как управляющим или как возмущающим.
Параметры объекта управления обычно характеризуют качество управления и их называют переменными управления или выходными величинами управляющего объекта.
Объект управления характеризуется определенными свойствами, которые влияют на работоспособность объекта и качества протекающих в цепи процессов.
К основным свойствам объекта управления относят самовыравнивание, запаздывание и аккумулирующую способность.
Под самовыравниванием понимают способность объекта самостоятельно приходить в новое состояние равновесия при изменении управляющего или возмущающего воздействия. Свойством самовыравнивания обладают не все объекты управления. Объекты управления которые описываются интегральными или интегрирующими звеньями не обладают самовыравниванием. Такие объекты называются астатическими, а обладающие самовыравниванием – статические.
Объекты без самовыравнивания очень трудно поддаются управлению. Самовыравнивание может быть положительным и отрицательным. В первом случае равновесие восстанавливается без участия регулятора. В случае отрицательного самовыравнивания, восстановление равновесия осуществляется только при участии регулятора. Это объясняется тем, что возникшее нарушение в объекте стремится к накоплению. При отрицательном самовыравнивании объект называется неустойчивым статическим, а при положительном – устойчивым статическим объектом.
Количественно самовыравнивание описывается коэффициентом самовыравнивания, который равен отношению производной от приращения внешнего воздействия к производной от управляемой величины
 1.89
1.89
 – приращение возмущения;
– приращение возмущения;
 – приращение управляемой величины.
– приращение управляемой величины.
Чем больше коэффициент ρ, тем легче осуществляется процесс автоматического управления, т.к. меньше отклонение управляемой величины, а следовательно процесс управления протекает быстрее и качественнее.
Объект с отрицательным самовыравниванием и объект без самовыравнивания не могут работать без регуляторов.
Большинство объектов управления в той или иной мере присуща инерционность, которая вызывает запаздывание во времени между изменением управляющего воздействия и соответствующим изменением управляемой величины. Такое запаздывание в объектах управления может быть переходным и транспортным.
Переходное запаздывание появляется из-за сопротивления перехода вещества из одной емкости в другую или энергии из одного состояния в другое, и всегда наблюдается в тех объектах, где имеются емкости, индуктивности, вращающиеся массы и т. д. Оно определяется как промежуток времени от момента возмущения до начала изменения управляемой величины в результате преодоления имеющихся сопротивлений. Переходное сопротивление отрицательно влияет на процесс управления.

Транспортное запаздывание присуще тем объектам, у которых между управляющим органом и выходом объекта имеются транспортные каналы (трубопроводы, ЛЭП и т. д.). Для прохождения такого канала требуется время, равное отношению длинны канала к скорости движения вещества или энергии.
Разным объектам управления присущи различные запаздывания:
1) одноемкостным объектам присуще только переходное запаздывание
2) двухемкостным и многоемкостным объектам присуще транспортное и переходное запаздывание
3) безъемкостным объектам, запаздывание вообще не присуще
Полное запаздывание объекта определяется суммой всех видов запаздываний в нем.
Опасно влияние любого вида запаздывания на процесс управления в объекте без самовыравнивания.
Любой технологический процесс в том или ином объекте управления связан с притоком, расходом, накоплением и преобразованием некоторой материальной среды или энергии. Многие объекты в процессе работы могут запасать внутри себя рабочую среду, что характеризует аккумулирующую способность рассматриваемого объекта. Аккумулирующая способность достаточно серьезно влияет на регулировочные свойства объекта. Саму эту способность оценивают по емкости объекта, под которым понимают запасенные объектом материал, вещество или энергию. Чем меньше емкость объекта, тем он более чувствителен к возмущающим воздействиям.
Количественно оценить емкость объекта можно при помощи коэффициента емкости, под которым понимают то количество энергии или вещества, которое необходимо подвести к объекту управления или отнести от него чтобы принять управляемую величину на единицу измерения
 1.90
1.90
y – управляемая величина;
С – емкость объекта.
Значение емкости характеризует запас управляемой величины или среды внутри объекта.
Изменение управляемого параметра во времени, представленное графически, называют кривой разгона. Кривые разгона объектов с различными свойствами
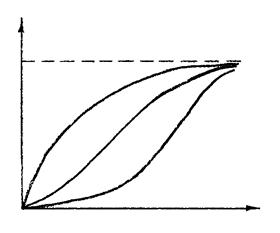 |
1)одноемкостной без передаточного запаздывания
2)многоемкостной без передаточного запаздывания
3) многоемкостной с передаточным запаздыванием
Основные характеристики кривой разгона
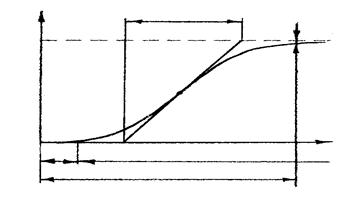 |
T – постоянная времени объекта
τп – транспортное (передаточное) запаздывание
τ0 – переходное запаздывание
yк – конечное (установившееся) значение управляемой величины
Время разгона – это время от момента подачи возмущения до момента, когда управляемый параметр достигнет нового установившегося значения (в практических целях до 99% установившегося значения).
В практических целях постоянную времени определяют как промежуток времени от момента подачи возмущения до момента, когда управляющий параметр станет равным 0,63 установившегося значения.

Для определения всех вышеназванных временных значений, используют графический метод или формулы
 1.91
1.91
ν – чувствительность объекта к возмущению.
 1.92
1.92
 1.93
1.93
Свойства объекта управления
ОБЪЕКТЫ УПРАВЛЕНИЯ И ИХ ОСНОВНЫЕ СВОЙСТВА
Объект управления является основной составной частью автоматической системы, определяющий ее характер. При всем разнообразии объектов управления они могут быть распределены на небольшое число типов, обладающих аналогичными динамическими характеристиками и характеризующихся следующими свойствами:нагрузкой, емкостью, способностью к самовыравниванию, запаздыванием процесса.
Способность объектов аккумулировать рабочую среду, запасать ее внутри объекта называется аккумулирующей способностью или емкостью объекта. Накопление вещества или энергии возможно благодаря тому, что в каждом объекте имеется сопротивление выходу.
Объекты управления подразделяются на одноемкостные и многоемкостные. Объект называется одноемкостным, если он состоит из одного сопротивления и емкости (аппарат в котором регулируется уровень, теплообменник смещения).
Многоемкостным объектом называется такой, который имеет две или более емкости, участвующие в процессе управления и разделенные переходными сопротивлениями (трубчатый теплообменник). В многоемкостных объектах различают емкости на входе и выходе.
Мерой емкости служит коэффициент емкости— количество вещества или энергии, которое нужно подвести к объекту, чтобы изменить управляемую величину на единицу:
Чем больше коэффициент емкости объекта, тем меньше скорость изменения управляемого параметра при одном и том же изменении количества подаваемого продукта. А это значит, что легче поддаются управлению те объекты, коэффициент емкости которых больше.
Способность объекта приходить после возмущения в новое установившееся состояние без вмешательства управляющего устройства называется самовыравниванием объекта.
Объекты, обладающие самовыравниванием, называются статическими объектами. Чем больше величина самовыравнивания, тем меньше отклоняется управляемый параметр от состояния равновесия, существовавшего до возмущения. Самовыравнивание облегчает работу управляющего устройства.
Объекты, не обладающие самовыравниванием, называются нейтральными или астатическими. Отсутствие самовыравнивания ухудшает возможности управления объектом.
Рассмотрим примеры объектов с самовыравниванием (рис. 43) и без него (рис. 44).

Рисунок 43 – Объект с самовыравниванием

Рисунок 44 – Объект без самовыравнивания
Коэффициент самовыравнивания не является постоянной величиной, а зависит от нагрузки объекта. Максимальной нагрузке соответствует максимальное значение r.
Различают два вида запаздывания: чистое (или транспортное) и переходное (емкостное).
Чистым запаздыванием называется время t от момента внесения возмущающего воздействия до начала изменения управляемой величины. Это время необходимо для того, чтобы поток вещества или энергии, обладающий скоростью v, прошел расстояние L от места внесения возмущающего воздействия до места, в котором измеряется значение управляемой величины. Например, контроль толщины насыпного слоя на ленте транспортер (рис. 35).

Рисунок 35 – Пример объекта с чистым запаздыванием
Чистое запаздывание смещает во времени реакцию на выходе в объекте по сравнению с моментом нанесения входного воздействия на величину запаздывания, не изменяя величину и форму воздействия.
Обычно в управляемых объектах имеется не только чистое, но и переходное запаздывание, которое характерно для многоемкостных объектов. Запаздывание возникает при преодолении потоком вещества или энергии сопротивлений, разделяющих гидравлические, тепловые и другие емкости объекта (рис. 46).
Время переходного запаздывания определяется отрезком tп. Переходное запаздывание определяется числом емкостей и величиной переходных сопротивлений. Поскольку величины переходных сопротивлений в процессе эксплуатации объекта могут изменяться, величины запаздываний могут возрастать.
Общее запаздывание tобщ в объекте управления равно сумме чистого и переходного запаздываний:
Как чистое, так и переходное запаздывания всегда неблагоприятно сказываются на качестве управления.

Рисунок 46 – Пример объекта с переходным запаздыванием
Объекты управления и их свойства

Объекты имеют разное назначение, в них происходят различные по физической природе процессы, но с точки зрения задач автоматизации можно выделить некоторые общие свойства и характеристики. Например, в системах автоматизации зданий важным нюансом является слаженная работа всех инженерных подсистем здания. К примеру, совместно со строительной компанией Riel был выполнен ряд работ по автоматизации зданий, позволив клиентам получить в свое распоряжение современное здание с функциями «умного» дома. Это особенно важно потому, что распределенность подсистем, внедрение агрегатов большой единичной мощности часто сопровождаются усложнением управления такими объектами в связи с тем, что имеются:
— недостаточные знания о механизме технологических процессов;
— стохастичность связей между выходами и входами (вероятной природой объектов);
— нестационарность (изменение характеристик со временем, эволюция объектов);
— наличие рабочих зон с различными процессами, которые происходят одновременно, застойных зон и т.д.
С точки зрения общей теории управления важное значение имеют такие обобщенные характеристики и показатели: наблюдаемость, управляемость, чувствительность. Наблюдаемость объекта означает, что существует возможность определить его состояние по данным измерений или соответствующих вычислений на конечном интервале времени, то есть измерить и (или) вычислить все координаты состояния объекта. Управляемость объекта означает, что существуют такие целенаправленные действия, с помощью которых объект из любого исходного состояния можно перевести в заданный конечное состояние в течение конечного интервала времени. Это соответствует тому, что под действием управлений меняются все координаты состояния объекта.

Объекты управления и их свойства
из категории » Нормативная документация » в сервисах:
Просто нажмите на кнопку нужного Вам сервиса и данная статья будет сохранена.
Объект управления
Ключевым моментом теории является создание математической модели, описывающей поведение объекта управления в зависимости от его состояния, управляющих воздействий и возможных возмущений (помех). Формальная математическая близость математических моделей, относящихся к объектам различной физической природы, позволяет использовать математическую теорию управления вне её связи с конкретными реализациями, а также классифицировать системы управления по формальным математическим признакам (например, линейные и нелинейные).
В теории автоматического управления считается, что управляющее воздействие на объект управления оказывает устройство управления. В реальных системах устройство управления интегрировано с объектом управления, поэтому для результативной теории важно точно определить границу между этими звеньями одной цепи. Например, при проектировании системы управления самолётом, считается, что устройство управления рассчитывает углы отклонения рулей, а математическая модель самолёта как объекта управления, должна, с учётом этих углов, определять координаты центра масс и угловое положение самолёта. Уравнения аэродинамики весьма сложные в общем виде, но в ряде случаев могут быть упрощены путём линеаризации, позволяя создать линеаризованную модель системы управления.
Связанные понятия
Упоминания в литературе
Связанные понятия (продолжение)
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования.
Сети адаптивного резонанса — разновидность искусственных нейронных сетей, основанная на теории адаптивного резонанса Стивена Гроссберга и Гейла Карпентера. Включает в себя модели обучения с учителем и без учителя, которые используются при решении задач распознавания образов и предсказания.
В искусственных нейронных сетях функция активации нейрона определяет выходной сигнал, который определяется входным сигналом или набором входных сигналов. Стандартная компьютерная микросхема может рассматриваться как цифровая сеть функций активации, которые могут принимать значения «ON» (1) или «OFF» (0) в зависимости от входа. Это похоже на поведение линейного перцептрона в нейронных сетях. Однако только нелинейные функции активации позволяют таким сетям решать нетривиальные задачи с использованием.



