Что такое обратная связь в электронике и автоматике
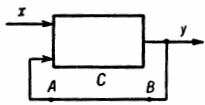
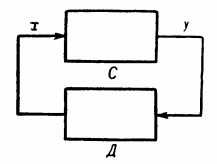
На функционирующую систему, кроме выходной величины, могут действовать также внешние воздействия (х на рис. 1). Цепь AB, по которой передается обратная связь, называется цепью, линией или каналом обратной связи.

Канал может сам содержать какую-либо систему (Д, рис. 2), преобразующую выходную величину в процессе ее передачи. В этом случае говорят, что обратная связь с выхода системы на ее вход осуществляется с помощью или через посредство системы Д.

Обратная связь является одним из важнейших понятий электроники и теории автоматического управления. Конкретные примеры реализации систем, содержащих обратные связи, можно обнаружить при изучении самых разнообразных процессов в автоматических системах, живых организмах, экономических структурах и т. п.
В силу универсальности понятия применимого в различных областях науки и техники, терминология в этой области не установилась, и в каждой частной области знаний, как правило, используется своя терминология.

Так, например, в системах автоматического регулирования широко применяются понятия отрицательной и положительной обратной связи, которыми определяется связь выхода системы с ее входом через усилительное звено с соответственно отрицательным или положительным коэффициентом усиления.
В теории электронных усилителей смысл этих терминов иной: отрицательной называется обратная связь, уменьшающая абсолютную величину общего коэффициента усиления, а положительной — увеличивающая ее.
В зависимости от способов реализации в теории электронных усилителей выделяют обратные связи по току, по напряжению и комбинированную.
В системы автоматического регулирования часто вводятдополнительные обратные связи, используемые для стабилизации систем или улучшения переходных процессов в них. Они иногда называются корректирующими и среди них выделяют жесткую(осуществляемую с помощью усилительного звена), гибкую(реализуемую дифференцирующим звеном), изодромную и т. п.
В различных системах можно всегда обнаружить замкнутую цепь воздействий. Например, на рис. 2 часть С системы действует на часть Д, а последняя снова на С. Поэтому такие системы называют такжесистемами с замкнутой цепью воздействий, системами с замкнутым циклом или замкнутым контуром.
В сложных системах может существовать множество различных цепей обратных связей. В многоэлементной системе выход каждого элемента может, вообще говоря, воздействовать на входы всех остальных элементов, включая свой собственный вход.
Любое воздействие можно рассматривать с трех основных сторон: метаболической, энергетической и информационной. Первая связана с изменениями расположения, формы и состава вещества, вторая — с передачей и преобразованием энергии, а третья — с передачей и преобразованием информации.
В теории управления рассматривается исключительно информационная сторона воздействий. Таким образом, обратная связь может быть определена как передача информации о выходной величине системы на ее вход либо как поступление информации, преобразованной звеном обратной связи, с выхода на вход системы.
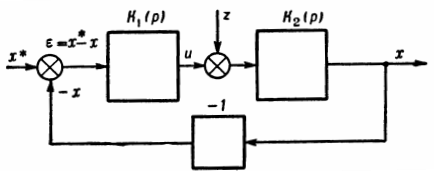
На применении обратной связи основан принцип устройства систем автоматического регулирования (САР). В них наличие обратной связи обеспечивает повышение помехоустойчивости из-за уменьшения влияния помехи (z на рис. 3), действующей в прямом тракте системы.

Если в линейной системе со звеньями, обладающими передаточными фциями Кх(р) и К2(р), снять цепь обратной связи, то изображение х выходной величины х определится следующим соотношением:

Если при этом требуется, чтобы выходная величина х в точности равнялась задающему воздействию х*, то общий коэффициент усиления системы К(р)= К1(р)К2(р) должен равняться единице, а помеха z должна отсутствовать. Наличие z и отклонение К(р) от единицы обусловливают возникновение погрешности е, т. е. разности


Если теперь замкнуть систему с помощью обратной связи, как показано на рис. 3, изображение выходной величины х будет определяться следующим соотношением:

Из соотношения следует, что при достаточно большом по модулю коэффициент усиления Кх(р) второе слагаемое пренебрежимо мало и, следовательно, влияние помехи z ничтожно. В то же время значение выходной величины х будет очень мало отличаться от значения задающего воздействия.

В замкнутой системе с обратной связью удается значительно уменьшить влияние помех по сравнению с разомкнутой системой, т. к. последняя не реагирует на действительное состояние управляемого объекта, «слепа» и «глуха» к изменению этого состояния.
Рассмотрим в качестве примера полет самолета. Если заранее с высокой точностью установить рули самолета так, чтобы он летел в заданном направлении, и жестко закрепить их, то порывы ветра и др. случайные и заранее непредвиденные факторы собьют самолет с нужного курса.
Исправить положение в состоянии только система с обратной связью (автопилот), способная сравнивать заданный курс х* с фактическим х и в зависимости от образовавшегося рассогласования изменять положение рулей.

О системах с обратной связью часто говорят, что они управляются ошибкой е (рассогласованием). Если звено Кх(р) представляет собой усилитель с достаточно большим коэффициентом усиления, то при определенных условиях, наложенных на передаточную функцию К2(р) остальной части тракта, замкнутая система остается устойчивой.В этом случае погрешность е в установившемся режиме может быть сделана сколь угодно малой. Достаточно ей появиться на входе усилителя Кх(р), чтобы на его выходе образовалось достаточно большое напряжение и, которое автоматически компенсирует помеху и обеспечивает такое значение х, при котором разность e=х*—х была бы достаточно мала. Малейшее нарастание е вызывает несоизмеримо большее нарастание u. Поэтому любая (в практических пределах) помеха z может быть скомпенсирована и притом при сколь угодно малой величине погрешности е, шунтирующую тракт с большим коэффициентом усиления, часто называют глубокой.Обратная связь в смешанных системах имеет место также и при функционировании сложных систем, состоящих из объектов различной природы, но действующих целенаправленно. Такими являются системы: оператор (человек) и машина, учитель и ученик, лектор и аудитория, человек и обучаемое устройство.Во всех этих примерах мы имеем дело с замкнутой цепью воздействий. По каналам обратной связи оператор получает информацию о характере функционирования управляемой машины, обучающий — информацию о поведении ученика и о результатах обучения и т. п. Во всех этих случаях в процессе функционирования существенно изменяются как содержание информации, передаваемое по каналам, так и сами каналы.
Обратная связь в системах автоматики
В системах автоматики различают последовательное и параллельное соединения элементов, а также соединение с обратной связью. При последовательном соединении выходной сигнал одного элемента является входным сигналом для последующего элемента. При параллельном соединении один и тот же сигнал является входным для двух элементов, а их выходные сигналы суммируются.
Общий коэффициент преобразования двух последовательно соединенных элементов цепи равен произведению коэффициентов преобразования этих элементов: Ко6=К1*K2. Общий коэффициент преобразования двух параллельно соединенных элементов равен сумме коэффициентов преобразования каждого из этих элементов: Ко6= К1+K2.
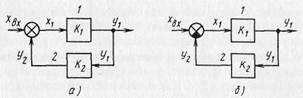
Рис.1.4. Соединение элементов с обратной связью
Этот сигнал поступает на вход элемента 2, включенного в цепь обратной связи. Cледовательно, выходной сигнал элемента 2 можно получить умножив сигнал у1 на коэффициент преобразования элемента 2: у2 = К2*у1. Подставив значение у2 в выражение для у1 т. е y1= K1*xвх± K1*K2*y1 и преобразовав его, получим
Проанализируем выражение для коэффициента преобразования при положительной обратной связи
Пусть в цепь включен усилитель с коэффициентом усиления 10, т. е. К1 = 10. Малую часть его выходного сигнала (например, 5 %) снова подадим на вход, подключив для этого в цепь обратной связи элемент с коэффициентом преобразования K2 = 0,05:
Таким образом, благодаря положительной обратной связи получен более высокий коэффициент усиления. Положительная обратная связь чаще всего используется в усилительных элементах автоматики (например в магнитных усилителях и бесконтактных магнитных реле). С помощью положительной обратной связи может быть получена и релейная характеристика.
На принципе отрицательной обратной связи основана работа систем автоматического регулирования (САР). Покажем это на примере элемента сравнения ЭС, в котором происходит вычитание выходного сигнала у(t) из входного сигнала g(t) (см. рис.1.1). Именно благодаря отрицательной обратной связи и обеспечивается автоматическое поддержание регулируемой величины на заданном уровне. Ведь благодаря отрицательной обратной связи постоянно определяется отклонение y(t) от g(t) и вырабатывается соответствующее этому отклонению регулирующее воздействие. В САР в цепь обратной связи включен датчик. Усилительные и исполнительные элементы автоматики включены в прямую цепь. Пусть коэффициенты преобразования всех элементов, включенных в прямую цепь, можно учесть, введя общий коэффициент преобразования Кпр, а датчик имеет коэффициент преобразования КД. Тогда в установившемся режиме общий коэффициент преобразования САР
При достаточно большом усилении можно принять Кпр* КД >> 1 и
Как видим, коэффициент преобразования САР полностью определяется коэффициентом преобразования датчика. Следовательно, именно от точности датчика зависит точность всей работы САР. Поэтому датчикам в системах автоматики, а также их метрологическим характеристикам, надежности придается особое значение. Наличие же обратной связи имеет важнейшее значение не только в автоматике, но и в биологических, экономических и социальных системах.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Обратные связи в АСУ




![]()
![]()
Автоматические системы управления в основном состоят из элементов направленного действия, значение выходной величины которых зависит только от значений входной. Так, элементами направленного действия являются датчики. Например, положение поплавка (датчика уровня жидкости) определяется только уровнем жидкости, но сам уровень не зависит от положения поплавка, если последний не введен в замкнутую систему управления.
Процесс передачи воздействия от одного из последующих элементов АСУ на какой-либо предыдущий элемент направленного действия, называют обратной связью. В АСУ с обратной связью изменение одной величины вызывает изменение и всех других, в том числе и той самой величины, которая вызвала первоначальные изменения.
По тому, как сказывается действие обратной связи на АСУ, различают отрицательную и положительную обратные связи. Отрицательная обратная связь уменьшает, а положительная увеличивает суммарное воздействие звеньев АСУ, охваченных обратной связью.
Для стабилизации систем или для создания в них более легких режимов переходных процессов в корректирующих устройствах используются обратные связи, которые в этом случае разделяют на жесткие и гибкие. Поясним эти понятия на примере управления температурой теплоносителя шахтной зерносушилки (рис. 5, а). Требуемая температура теплоносителя поддерживается здесь при помощи заслонки 2, которая, поворачиваясь, изменяет соотношение притоков горячего воздуха Qt, поступающего из топки, и холодного Q±, забираемого из атмосферы. Температуру теплоносителя измеряет термодатчик 1, включенный в одно из плеч измерительного моста. Заданное значение управляемой температуры 6Э устанавливают, перемещая ползунок резистора-задатчика RB. Поскольку сигнал выхода с измерительного моста маломощен, для управления реверсивным электродвигателем 3 используется усилитель 4.
Когда температура теплоносителя в некоторый момент времени отклоняется от заданной, на выходе моста появляется сигнал разбаланса, который, пройдя через усилитель 4, включает двигатель 3, перемещающий заслонку 2 в ту или иную сторону в зависимости от знака отклонения.
Вследствие инерционности термодатчика 1 и его удаленности от заслонки 2 процесс управления может продолжаться бесконечно, то есть новый равновесный режим в системе не установится (кривая 1 на рис. 6). Действительно, когда заслонка придет в новое равновесное положение, температура термодатчика еще отличается от заданной и регулятор будет продолжать дальше передвигать заслонку. Следовательно, через некоторое время температура теплоносителя в месте установки термодатчика сравняется с заданной, а затем получит отклонение обратного знака. Иными словами, в системе возникают периодические колебания, называемые автоколебаниями. Автоколебания управляемой величины (температуры) в данной системе возникают вследствие того, что остановка двигателя происходит не в момент достижения заслонкой требуемого положения, а с определенным запаздыванием.
Для устранения автоколебаний или уменьшения их амплитуды применяется жесткая обратная связь, которая позволяет остановить двигатель до того, как температура достигнет заданного значения, поскольку после прекращения перемещения заслонки температура объекта и термодатчика приближается к заданному значению.
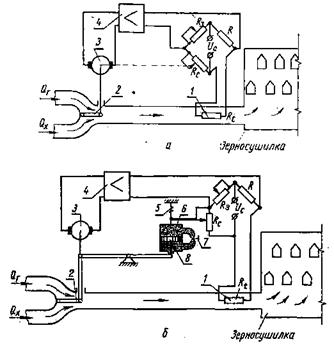
Рис. 5. Схемы регулирования температуры теплоносителя шахтной зерносушилки:
а — статическим регулятором с жесткой обратной связью; б — астатическим регулятором гибкой обратной связью.
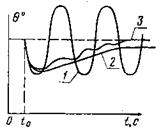
Рис. 6. Графики переходных процессов для регуляторов без обратной связи (1), с жесткой обратной связью (2), с гибкой обратной связью (3).
Жесткая обратная связь осуществляется при помощи резистора Ro переменного сопротивления, ползунок которого имеет жесткую механическую связь с ротором электродвигателя. 3 и перемещается одновременно с ним. Очевидно, что равновесие в системе наступит в тот момент, когда приращение сопротивления Rc, возникающее вследствие передвижения ползунка, и приращение сопротивления Rt, вызванное изменением температуры теплоносителя, станут равны друг другу (ΔRс =ΔRt). Таким образом, электродвигатель 3 в данной системе останавливается несколько раньше, чем в системе без обратной связи. Благодаря этому отклонения в системе будут уменьшаться и переходный процесс полностью прекратится в тот момент, когда отклонение температуры станет меньше зоны нечувствительности регулятора. Следовательно, новый равновесный режим устанавливается при наличии отклонения регулируемой величины θ от заданной θз, то есть жесткая обратная связь позволяет получить статическую характеристику управления, аналогичную изображенной на рисунке 2, а.

Для получения изодромной характеристики управления следует использовать гибкую обратную связь, выполненную при помощи специального изодромного устройства (рис. 5, б), в состав которого в данном случае входят масляный катаракт 6 с вентилем 7, поршень 8 и пружина 5.
Сущность гибкой обратной связи заключается в том, что она действует только во время переходного процесса и полностью устраняется в установившемся режиме. Например, при понижении температуры теплоносителя сопротивление терморезистора Rt возрастает, вследствие этого мост разбалансируется и происходит перемещение заслонки 2 по часовой стрелке, а ползунка резистора Rc — вверх. Таким образом, на начальном этапе управления изодромное устройство, как и жесткая обратная связь, способствует затуханию колебаний. В конце процесса управления пружина 5 передвигает ползунок в первоначальное положение, измерительный мост возвращается в состояние равновесия, что будет соответствовать достижению заданного значения температуры. Время переходного процесса управления определяется параметрами системы и временем движения масла изодромного устройства из одной полости катаракта 6 в другую через вентиль 7.
Следовательно, гибкая обратная связь в АСУ обеспечивает астатическую характеристику управления, аналогичную изображенной на рисунке 2, б.
Что такое обратная связь в электронике и автоматике
На функционирующую систему, кроме выходной величины, могут действовать также внешние воздействия (х на рис. 1). Цепь AB, по которой передается обратная связь, называется цепью, линией или каналом обратной связи.
Канал может сам содержать какую-либо систему (Д, рис. 2), преобразующую выходную величину в процессе ее передачи. В этом случае говорят, что обратная связь с выхода системы на ее вход осуществляется с помощью или через посредство системы Д.
Обратная связь является одним из важнейших понятий электроники и теории автоматического управления. Конкретные примеры реализации систем, содержащих обратные связи, можно обнаружить при изучении самых разнообразных процессов в автоматических системах, живых организмах, экономических структурах и т. п.
В силу универсальности понятия применимого в различных областях науки и техники, терминология в этой области не установилась, и в каждой частной области знаний, как правило, используется своя терминология.

Так, например, в системах автоматического регулирования широко применяются понятия отрицательной и положительной обратной связи, которыми определяется связь выхода системы с ее входом через усилительное звено с соответственно отрицательным или положительным коэффициентом усиления.
В теории электронных усилителей смысл этих терминов иной: отрицательной называется обратная связь, уменьшающая абсолютную величину общего коэффициента усиления, а положительной — увеличивающая ее.
В зависимости от способов реализации в теории электронных усилителей выделяют обратные связи по току, по напряжению и комбинированную.
В системы автоматического регулирования часто вводят дополнительные обратные связи, используемые для стабилизации систем или улучшения переходных процессов в них. Они иногда называются корректирующими и среди них выделяют жесткую (осуществляемую с помощью усилительного звена), гибкую (реализуемую дифференцирующим звеном), изодромную и т. п.
В различных системах можно всегда обнаружить замкнутую цепь воздействий. Например, на рис. 2 часть С системы действует на часть Д, а последняя снова на С. Поэтому такие системы называют также системами с замкнутой цепью воздействий, системами с замкнутым циклом или замкнутым контуром.
В сложных системах может существовать множество различных цепей обратных связей. В многоэлементной системе выход каждого элемента может, вообще говоря, воздействовать на входы всех остальных элементов, включая свой собственный вход.
Любое воздействие можно рассматривать с трех основных сторон: метаболической, энергетической и информационной. Первая связана с изменениями расположения, формы и состава вещества, вторая — с передачей и преобразованием энергии, а третья — с передачей и преобразованием информации.
В теории управления рассматривается исключительно информационная сторона воздействий. Таким образом, обратная связь может быть определена как передача информации о выходной величине системы на ее вход либо как поступление информации, преобразованной звеном обратной связи, с выхода на вход системы.
На применении обратной связи основан принцип устройства систем автоматического регулирования (САР). В них наличие обратной связи обеспечивает повышение помехоустойчивости из-за уменьшения влияния помехи (z на рис. 3), действующей в прямом тракте системы.
Если в линейной системе со звеньями, обладающими передаточными фциями Кх(р) и К2(р), снять цепь обратной связи, то изображение х выходной величины х определится следующим соотношением:

Если при этом требуется, чтобы выходная величина х в точности равнялась задающему воздействию х*, то общий коэффициент усиления системы К(р)= К1(р)К2(р) должен равняться единице, а помеха z должна отсутствовать. Наличие z и отклонение К(р) от единицы обусловливают возникновение погрешности е, т. е. разности

Если теперь замкнуть систему с помощью обратной связи, как показано на рис. 3, изображение выходной величины х будет определяться следующим соотношением:

Из соотношения следует, что при достаточно большом по модулю коэффициент усиления Кх(р) второе слагаемое пренебрежимо мало и, следовательно, влияние помехи z ничтожно. В то же время значение выходной величины х будет очень мало отличаться от значения задающего воздействия.

В замкнутой системе с обратной связью удается значительно уменьшить влияние помех по сравнению с разомкнутой системой, т. к. последняя не реагирует на действительное состояние управляемого объекта, «слепа» и «глуха» к изменению этого состояния.
Рассмотрим в качестве примера полет самолета. Если заранее с высокой точностью установить рули самолета так, чтобы он летел в заданном направлении, и жестко закрепить их, то порывы ветра и др. случайные и заранее непредвиденные факторы собьют самолет с нужного курса.
Исправить положение в состоянии только система с обратной связью (автопилот), способная сравнивать заданный курс х* с фактическим х и в зависимости от образовавшегося рассогласования изменять положение рулей.

О системах с обратной связью часто говорят, что они управляются ошибкой е (рассогласованием). Если звено Кх(р) представляет собой усилитель с достаточно большим коэффициентом усиления, то при определенных условиях, наложенных на передаточную функцию К2(р) остальной части тракта, замкнутая система остается устойчивой.
Обратная связь в смешанных системах имеет место также и при функционировании сложных систем, состоящих из объектов различной природы, но действующих целенаправленно. Такими являются системы: оператор (человек) и машина, учитель и ученик, лектор и аудитория, человек и обучаемое устройство.
Во всех этих примерах мы имеем дело с замкнутой цепью воздействий. По каналам обратной связи оператор получает информацию о характере функционирования управляемой машины, обучающий — информацию о поведении ученика и о результатах обучения и т. п. Во всех этих случаях в процессе функционирования существенно изменяются как содержание информации, передаваемое по каналам, так и сами каналы.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!



