Факторы, влияющие на ресурс игровых рулей

Во всех тестах игровых рулей, каких в сети сотни, тщательно обходят вопрос ресурса игровых рулей и педалей. Казалось бы — покупателю стоит рассказать как долго проработает его покупка, каков ресурс устройства. Но нет, нигде вы такой информации не найдете.
В этой статье я хочу прояснить, какие конструктивные элементы рулей и педалей влияют на срок эксплуатации игровых рулей и педалей.
Во второй части мы рассмотрим с точки зрения ресурса игровой руль Gametrix Viper.
Главный тезис, из которого я исходил при написании этой статьи формулируется так: «Покупатель игрового устройства хочет, чтобы оно служило ему как можно дольше». Если вы согласны со мной, приглашаю оценить этот материал. Если же вы из тех, кто готов менять девайсы раз в месяц — эта статья не для вас.
ДАТЧИКИ
Тут глубокоуважаемый Boomburum прояснил сущность надежности датчиков рулей одной емкой фразой: «все, что трется, рано или поздно выйдет из строя» .
Если мы измеряем угол отклонения руля или педалей при помощи ПОТЕНЦИОМЕТРА, устройства, построенного на ТРЕНИИ (картинка ниже беззастенчиво стянута у Boomburum-а), то можно с математической точностью предсказать, сколько проработает тот или иной руль или педали 
Каждый потенциометр имеет четко обозначенный производителем ресурс. Обычно используются потенциометры с ресурсом от 500 тысяч до миллиона циклов.
Например:
www.ctscorp.com/components/Datasheets/295.pdf
www.ctscorp.com/components/Datasheets/251.pdf
Помня, что игрок в среднем совершает одно движение рулем в секунду, мы получаем срок жизни датчика в руле — 1 000 000 / 60 = 16 666 минут / 60 = 277 часов
Т.е. ресурс руля с таким потенциометром составит 277 часов. Играя по часу в день, гонщик выбросит этот руль через 277 дней, т.е. через 9 месяцев.
Однако (опять же благодаря Boomburum-у) мы знаем, что потенциометр — не единственный способ измерить угол отклонения руля или педалей. Существуют также бесконтактные датчики — оптический энкодер и магнитный резистор.
Ресурс таких датчиков мы можем определить как бесконечный, т.к. в них нет разрушаемых элементов.
ШЕСТЕРНИ РЕДУКТОРА
Очень часто ось вращения руля связывают с датчиком не напрямую, а через шестеренчатый редуктор.
У рулей на потенциометрах это связано с тем, что угол, на который физически можно повернуть вал потенциометра обычно меньше, чем угол вращения баранки. К примеру, вот этот потенциометр имеет максимальный угол вращения 212 градусов. А баранка руля обычно поворачивается на 250-300 градусов. Производитель решает вопрос просто — связывает ось вращения руля с осью потенциометра через простейший редуктор: 
Редуктор руля на потенциометре

Диск оптического энкодера Logitech MOMO
Вторая причина применения редукторов в игровых рулях — это реализация системы обратной связи Force Feedback. Система активной обратной связи управляет движениями баранки в соответствии с происходящим в игре, повышая интерактивность. Она реализована при помощи электрического двигателя, который связан с осью рулевого колеса при помощи редуктора.
Система FFB имеет 2 основные задачи — возвращать рулевое колесо в центр и реализовывать силовую реакцию на события в игре. Во время игры пользователь держится за баранку (все в курсе?), а система FFB сопротивляется усилиям, которые прилагает игрок к рулевому колесу. И эти усилия бывают весьма велики. Все нагрузки ложатся на шестерни редуктора, а т.к. шестерни сделаны из пластика, их ресурс определяется его качеством.
Как пример не лучшего решения конструкции редуктора можно привести руль для приставки XBOX 360 Microsoft Wireless Racing Wheel. Цитирую человека, который постоянно использует эти рули на выставках для демонстрации игр: «Заметил, что из них перед смертью начинает сыпаться белый порошок. Мы чтобы продлить срок их службы, начали на выставках отключать Force Feedback». Типичная картина разрушения шестерен редуктора (на фото редуктор нового руля) 
Какую ошибку допустили разработчики этого редуктора? Средняя шестерня редуктора в 2 раза уже ведущей и ведомой шестерни. Естественно, что ее зубья не выдерживают нагрузок, которые спокойно переносят две другие шестерни.
UPD Товарищ ZUZ ниже дал весьма грамотный комментарий по этому вопросу:
1) на промежуточном колесе и нагрузки-то будут в разы меньше, чем на «большом», а точнее в K=m_колеса1/N_колеса2 (количество зубъев в большом и среднем колесах соответственно)
2) колесо на двигателе сделано больше чем примыкающее промежуточное, потому что оно подвержено износу сильнее (больше оборотов) и делается из более износостойкого материала и износу соответственно из ни двоих подвергается большее по диаметру, и по этому оно уже, чтобы не нем не появилось «канавки» шириной в неизнашиваемое колесо широной
Однако, надо отметить, что разрушение редуктора — довольно редкое явление. Скажем, в приведенном выше примере редуктор разрушался из-за того, что руль эксплуатировался в очень жестком выставочном режиме, для чего он изначально не предназначен. Поэтому когда мы говорим о ресурсе редуктора, мы имеем ввиду время, через которое люфты на рулевом колесе, связанные с износом шестерен и осей, на которых они вращаются, станут неприемлемыми для нормальной игры. Следствием появления люфтов является возникновение мертвых зон, которые ухудшают точность управления.
ОСИ ВРАЩЕНИЯ
В игровых рулях много деталей, поворачивающихся вокруг оси. Вращается рулевое колесо, вращаются педали, вращаются шестерни редуктора. Человечество давно придумало способ увеличения ресурса осей вращающихся деталей, применяя подшипники. В условиях эксплуатации игровых рулей применение подшипников делает ресурс осей практически вечным. Однако на рынке есть всего 2 модели, где оси рулевого колеса и шестерен редуктора установлены на подшипники — это Logitech G25 и G27. Все остальные используют т.н. «подшипники скольжения» разного уровня качества сопряжения деталей. Обычно применяется пара «стальная ось/пластиковая деталь» или «пластиковая ось/пластиковая деталь» или и то и другое вместе.
Вот пример редуктора дерьмового бюджетного руля с FFB: 
Центральный пластиковый шток вращается в пластиковой детали, шестерни — на стальных осях. Это типичный пример «как делать не надо». Многоступенчатость редуктора в данном случае приводит к появлению люфтов уже и в новом изделии, а в процессе эксплуатации люфт будет быстро увеличиваться, т.к. люфт каждой из осей будет «суммироваться» в редукторе.
При оценке ресурса осей вращения мы также говорим не о разрушении, а о времени, через которое люфты станут неприемлемыми для нормальной игры.
В приведенном примере люфты становятся неприемлемыми быстро — в конструкции слишком много мест, где возникают и увеличиваются люфты.
Мы рассмотрели основные факторы, определяющие ресурс игрового руля. В следующей статье мы рассмотрим руль Gametrix Viper с точки зрения его надежности по этим 3-м пунктам.
PS
Мы разрабатываем видеоролик, в котором постараемся показать внутреннее устройство игровых рулей и педалей.
Ниже фрагменты из этого ролика.
Потенциометр, его устройство и ресурс 47 мб:
Причины появления мертвых зон, люфты редуктора (в эпизоде допущено несколько серьезных ошибок, в частности, не правильно подвязаны графики работы педалей, прошу учесть, что это далеко не окончательная версия) 50 мб:
Полетаем! Как выбрать контроллер для авиасимуляторов


Содержание
Содержание
Авиасимуляторы среди игровых жанров занимают прочную нишу и привлекают внимание тысяч игроков со всего мира. Для того, чтобы игрок смог почувствовать себя настоящим пилотом, были придуманы специальные контроллеры для авиасимуляторов. Какие именно и что они могут — в этой статье.
История жанра стартует в далекие 70-е годы. Тогда малоизвестный программист Брюс Артвик написал диссертацию, в которой сумел доказать возможность моделирования полета в реальном времени с помощью микрокомпьютера. Это дало толчок к бурному развитию жанра. Уже в 90-е симуляторы заманивали игроков детализированными кабинами, огромным набором функций, реалистичными приборами и органами управления.
Виды авиасимуляторов
Среди симуляторов полетов выделяют следующие категории.
• Упрощенные. Отличаются аркадным управлением, отсутствием реалистичной физики. Для управления применяют джойстик, но также можно играть на клавиатуре или же простым наклона смартфона в случае с мобильной версией.

• Реалистичные. Имеют реалистичную физику, симуляцию аэродинамических, погодных условий. Игрок столкнется с внештатными ситуациями: перегрев двигателей, необходимость дозаправки, поломки самолета или вертолета. Играть желательно только специальными контроллерами.
• Профессиональные. Применяются чаще всего для реальной подготовки летчиков. Помимо органов управления, могут иметь реалистичную модель кабины со всеми работающими приборами и функциями.

Герой нашей статьи — контроллер (он же джойстик) — появился раньше, чем сами симуляторы полетов. Это произошло в начале 20 века в авиационной среде. Долгое время джойстик был универсальным устройством для всех игр, но позже прочно занял место главного контроллера для авиасимуляторов.
Оси и виброотдача — на что обратить внимание будущему пилоту
Прежде чем перейти к главному вопросу и рассказать какие бывают контролеры, нужно понять по каким параметрам их выделяют.
Количество осей
Один из основных факторов при выборе. От количества осей будут зависеть кульбиты, которые вы будете вытворять на своем воздушном судне. Чем больше осей, тем лучше. Для комфортной игры желательно не менее четырех.
Виброотдача
Во время полета вы пытаетесь дать крен своему многотонному судну, но джойстик сопротивляется. Это и есть виброотдача или обратная связь, симулирующая поведение органов управления при разных условиях полета. Управлять самолетом становится реалистичнее, но труднее.
Hat-switch
Или просто «хатка». Переключает камеру и позволяет смотреть во все стороны. Очень полезно при ведении воздушного боя.
Типы контроллеров
А сейчас перейдем к самому главному вопросу и разберемся, какие же контроллеры помогут игроку почувствовать себя настоящим пилотом.
Джойстик
Самый важный инструмент в виртуальных полетах. Все джойстики имеют схожую конструкцию, состоящую из подставки и эргономичной пластиковой рукоятки, за которую держится игрок. Чем тяжелее и шире подставка, тем крепче она будет держаться на поверхности стола во время игры. Рукоятка подпружинена и имеет центрирующий механизм («центровка»), поэтому легко возвращается в исходное положение. В некоторых моделях она вращается на 360 градусов и может быть репликой с известного летательного средства.
Джойстик чаще всего имеет четыре оси отклонения. Ось Y отвечает за тангаж или, проще, набор или сброс высоты (двигаем «от себя» или «к себе»). Ось Х помогает сделать крен вправо или влево. Третья ось нужна для увеличения или снижения мощности двигателей. В некоторых моделях эта функция возложена на рычажок (ползунок) на подставке устройства. Четвертая ось (Z) нужна для управления рулем поворота в горизонтальной плоскости путем вращения рукояти джойстика по и против часовой стрелки. Это называется «твист», и он поможет совершить маневры, прицелиться и открыть огонь, не сбрасывая скорость.

Осей может быть намного больше, и представляют они собой ручки, ползунки, рычажки, помогающие комфортно управлять полетом. Например, можно чуть отклонить рукоятку и плавно задать самолету небольшой крен или отклонить рукоятку на максимум и развернуть самолет резко. В простых симуляторах джойстиком осуществляются простые действия по набору высоты или повороту самолета в разные стороны.
Работа джойстика несколько похожа на работу сенсора мыши. Вращение рукоятки замеряется специальными датчиками, после чего сигнал подается на компьютер. Датчики в джойстике бывают двух типов: резисторные и магнитные. В первом случае в корпусе устройства находятся соприкасающиеся друг с другом контакты. Это удобно, но недолговечно. Во втором случае используется датчик Холла, что делает джойстик более точным и прочным.
Слева направо: рыскание (поворот в горизонтальной плоскости), крен, тангаж
На корпусе устройства есть множество программируемых кнопок с подсветкой. На них можно возложить функции выпуска шасси и закрылок, захвата цели. На передней части контроллера располагается гашетка, нажатием на которую можно открыть огонь по противнику. Чем больше кнопок, тем лучше. Но делать упор на их количество при выборе не стоит, так как при игре в реалистичный симулятор все равно придется прибегнуть к помощи клавиатуры.

На макушке рукояти мы увидим небольшой рычажок. Это и есть «хатка», вращение которой поможет пилоту смотреть не только перед собой, но и по сторонам. Очень удобно, когда в бою требуется оценить обстановку и посмотреть, где находится враг. «Хаток» может быть несколько. Например, одной можно сменить вид, а второй — наводить прицел на цель.
Подключается джойстик как правило через USB-разъем с помощью драйверов, которые идут в комплекте. Все устройства совместимы с ПК, а некоторые модели — также и с консолями.
РУД — рычаг управления двигателем
Выше уже было сказано, что на корпусе некоторых джойстиков имеется рычажок для увеличения или уменьшения скорости судна. Первоначально джойстики были вообще без функции тяги, поэтому регулировать скорость приходилось на клавиатуре. Сейчас для более полного погружения в игру с этой целью используют отдельную панель под левую руку игрока. На ней располагаются два или три рычага, передвигая которые можно управлять двигателями, работой закрылок при взлете и посадке, выпуском шасси и другими настраиваемыми функциями. РУД имеет плавный и широкий ход, а количество ходов рукояти при перемещении зависит от конкретной модели и может достигать четырех шагов. Многие системы управления симулятором имеют вид типа HOTAS (Hands On Throttle And Stick) — джойстик + рычаг.

Также на корпусе РУДа есть сенсорный дисплей, программируемые кнопки и переключатели, настраиваемые на выполнение разных команд. Например, можно ввести данные и параметры полета. РУДы имеют виброотдачу и регулируемое сопротивление, которые должны усложнить игру.
Корпусы панелей с рычагами иногда являются точными копиями с приборов известных самолетов, например, Airbus.
Педали управления
Если вы хотите сделать свои полеты более реалистичными, то в пору задуматься про педали. Конструктивно они выглядят как подставка с двумя педалями. Нажимая на их правой и левой стопами, игрок сможет управлять торможением, а также тягой воздушного судна. Еще с помощью педалей можно осуществить «рыскание» или горизонтальный поворот самолета. На джойстике это действие выполняется поворотом рукоятки (тот самый «твист»), но в реальных самолетах эта функция всегда возложена именно на педали. Педали снабжены самоцентровкой и амортизацией. В комплекте могут идти и пружины, чтобы пользователь самостоятельно отрегулировал степень напряжения. Минусом может быть неустойчивая подставка и скрипучий пластик.
Панели управления и радиоприборов
Если симулятор все еще кажется вам не совсем реалистичным, то присмотритесь к панелям приборов. Они представляют собой копию реальных приборов информации и связи. На корпусе панели имеются один или несколько ЖК-дисплеев, которые в режиме реального времени отображают навигационные данные и другие параметры полета. Нажимая на кнопки и тумблеры, можно управлять закрылками, триммером руля.
Однако изменить положение самолета в пространстве с помощью такой панели не получится — нужен джойстик и РУД. Имея джойстик, РУД, панели управления, можно избавить себя от постоянного обращения к клавиатуре. Если же у вас в комплекте есть еще и радиопанель, то на цветном ЖК-дисплее можно считывать информацию со всевозможных приборов. Некоторые типы радиопанелей имитируют до пятнадцати приборов, между которыми можно легко переключаться нажатием специальных кнопок. Приборы: высотомер, компас, авиагоризонт, бортовой пеленгатор и многое другое.

И да, чем больше таких панелей, тем больше приборов будет в вашем самолете.
Штурвал
Если играть с джойстиком кажется вам слишком легким, то попробуйте штурвал. Вкупе с педалями и панелями приборов он обеспечит полное погружение в игру. По умолчанию многие штурвалы работают по четырем стандартным осям. На корпусе устройства располагаются клавиши, отвечающие за закрылки, тормоза, шасси. Также можно регулировать тягу двигателя, используя идущий в комплекте РУД (в некоторых моделях). Однако такой элемент управления подойдет только для гражданских судов, но не для военной авиации.
Как видно, органы управления для авиасимуляторов довольно разнообразны и помогут создать у себя дома настоящую кабину самолета. При выборе того или иного элемента управления, не забывайте проверять, подойдет ли он для вашего типа симулятора. Обратите внимание на интерфейс подключения и, конечно же, в обязательном порядке читайте инструкцию!
Едем вниз — растём вверх, или ось Z за недорого

Доброго вам времени суток, уважаемые гики и сочувствующие! Эта публикация — продолжение описания конструкции моего самодельного 3D принтера. Ось Z — один из самых противоречивых узлов принтера. Что выбрать — ультимативную точность или хорошее масштабирование? Перемещать ось Х или рабочий стол принтера? Два подхода — два решения.
На первые 3D принтеры я не мог смотреть без содрогания: конструкции были незрелые, многие узлы использовались с нарушением ТУ, из-за общей зыбкости требовалась постоянная подстройка, мелкий ремонт, размеры рабочего поля были малыми. Я реши решить проблему внутренних противоречий, просто скрестив ежа с ужом конструкции портального фрезерного станка и 3D принтера.
Был спроектирован и скручен воедино остов 3D монстра:
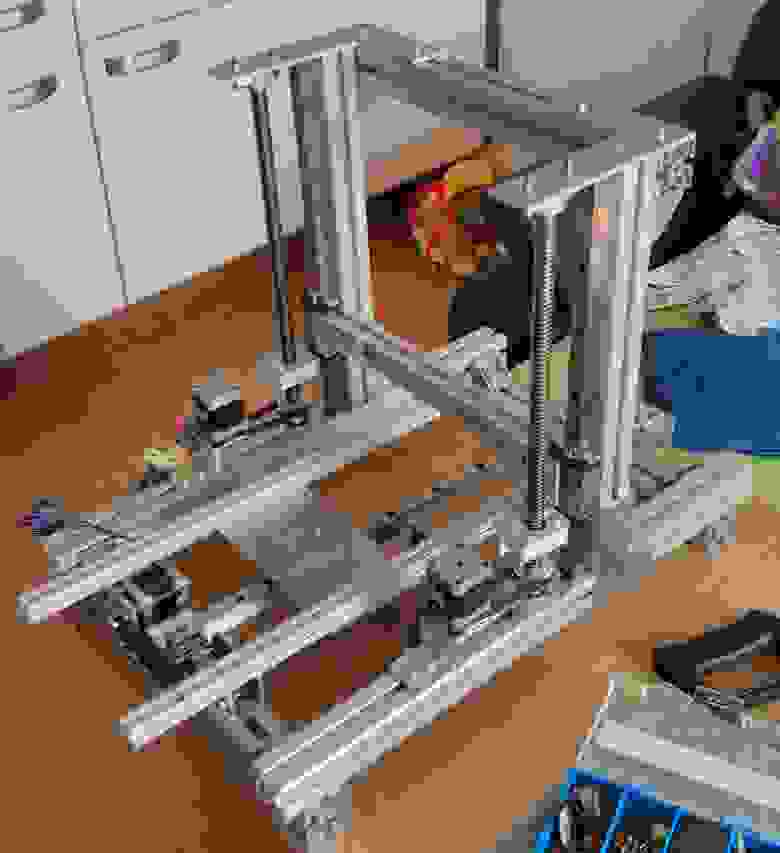
Он состоит из сорокамиллиметровых алюминиевых конструкционных профилей, соединяемых толстыми уголками 45х45 и болтами М8. Эта конструкция имеет размеры 60х40х40 см и абсолютно непоколебима при нормальной работе принтера. Размер рабочей площадки составлял 45х22 см, при максимальной высоте объекта 28 см.
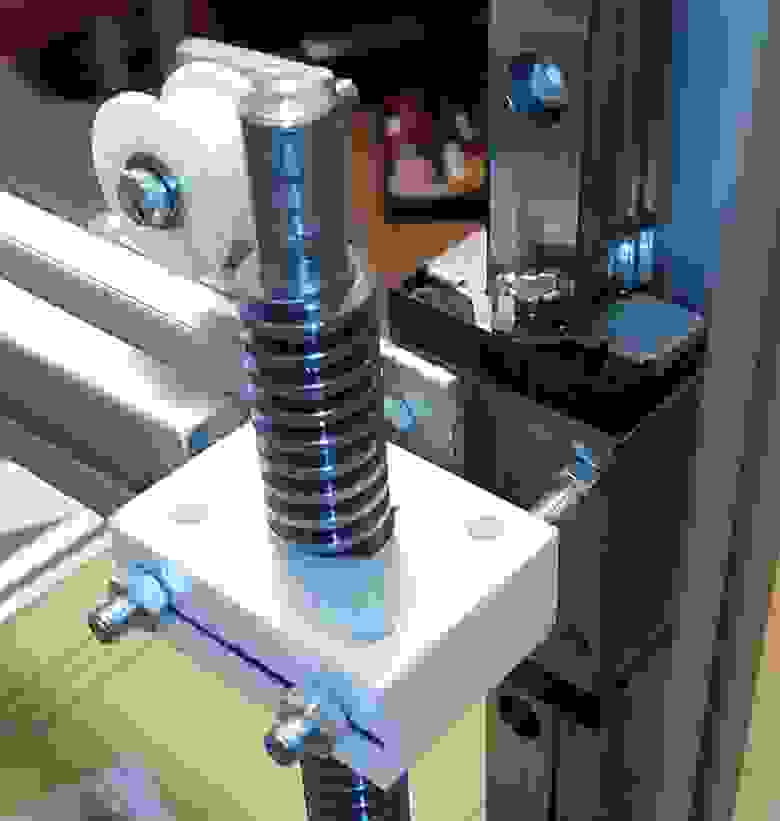
Ось Z образована двумя вертикально расположенными двадцатимиллиметровыми линейными шинами с прецизионными каретками. Каретки приводятся в движение прецизионными трапецевидными винтами, установленными на радиально-упорные подшипники. Каждый винт имеет привод от шагового мотора через ременную передачу 3:1. Верхние концы винтов обточены и вставлены в игольчатые втулки так, чтобы осевое смещение винта во втулке предотвращало его подклинивание при тепловом расширении. Я использовал полимерную гайку для винтов: больших скоростей/нагрузок нет, а полимерная гайка не так требовательна к смазке и значительно проще в монтаже. В данной конструкции рост высоты модели обеспечивается поднятием оси Х над столом, а ось Z используется как подвижная опора для оси X.

Эта ось работала без каких-либо проблем вплоть до разборки этого принтера на запчасти.
Недостатки данного решения:
1. Цена. Прецизионные компоненты стоят дорого.
2. Сложность конструкции
3. Плохая масштабируемость.
Когда я начал строить второй принтер, опыт и скаредность участвовали в создании конструкции наравне с врождённым желанием идти своим путём, не ожидая милостей от природы.
Соответственно, новый принтер должен был стать не только более простым, быстрым, универсальным, надёжным и ремонтопригодным, но и значительно более дешёвым.
Для оси Z нового принтера был выбран не винтовой привод, а сходная с лебёдкой грузовых кранов тросовая конструкция. Она состоит из собственно приводного механизма с ремённым понижающим редуктором и двух блоков, на которые и ложится вся масса по оси Z.
Здесь фото принтера в целом:
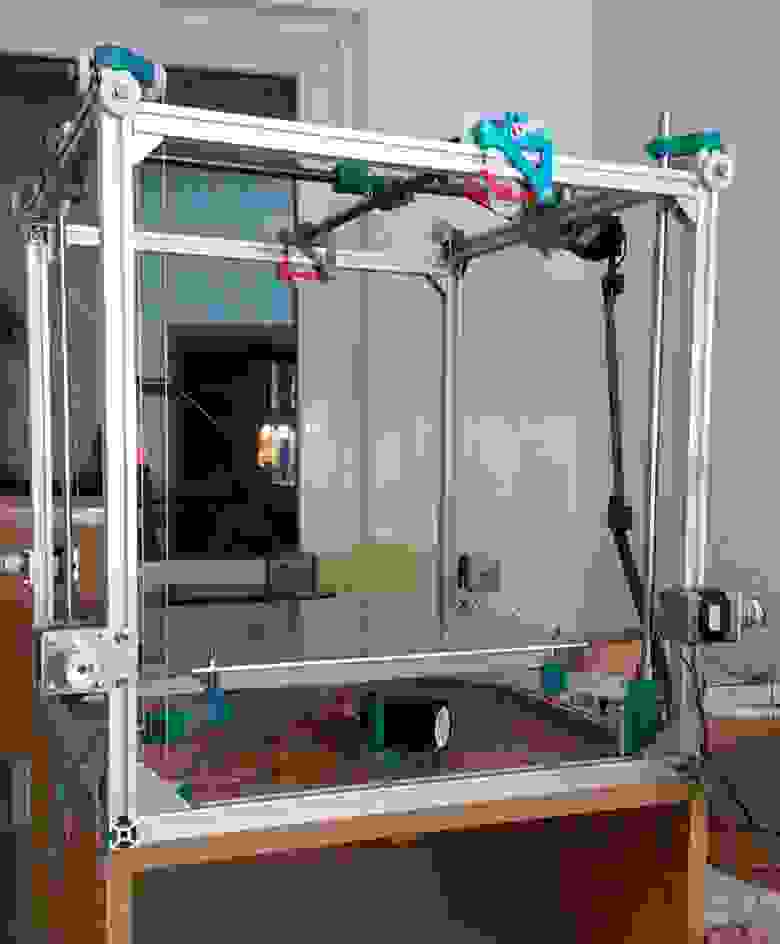
За стабильность пространственной ориентации отвечают две круглые десятимиллиметровые стальные шины, по которым перемещаются парные подшипники скольжения из синтерной бронзы.
На следующих двух видео можно рассмотреть конструкцию лебёдки, там ничего сложного:
Остов оси Z: простая и лёгкая конструкция.

Расчёты по мощности: Приводной барабан имеет радиус 10 мм. Соответственно, крутящий момент 0,3 Нм (обычный мотор Nema 17) на рычаге в 10 мм составит 30 Н. Ременный редуктор с передаточным числом 2:1 удваивает это число.

Вследствие этого максимальное усилие, которое может развить эта лебёдка, составляет около 60 Ньютон, соответственно максимальная масса оси Z вместе с массами стола и объекта не должна превышать 6 кг в покое.
Теперь определим потери на разгон и торможение оси Z: для разгона 1кг массы с ускорением 1 м/с², необходимо приложить силу в 1 Ньютон. На самом деле, ускорения 1 м/с² для оси Z вполне достаточно, и каждый разгоняемый килограмм обойдётся нам в 1 Н приложенной силы.
Самый тяжёлый элемент в конструкции — подогреваемый стол, это дюралюминиевая пластина 350х350х3 мм весом 980 грамм с приклеенными нагревательными элементами общим весом 150 грамм.
Остальные элементы конструкции, включая теплоизоляцию из Basotect, весят около 900 грамм.
Общий вес конструкции составляет около 2030 грамм, что при округлении в большую сторону потребует 21 Н для удержания и ещё 2,1 Н для ускорения. Итого, ещё раз округляя в сторону больших значений, 24 Н.
Если же к массе оси Z добавить килограммовую модель, то понадобится уже 34 Н, что составляет
чуть более половины расчётной мощности лебёдки. Казалось бы, конструкция избыточна по мощности. Но дьявол, как всегда, кроется в деталях. Дело в том, что для достижения максимального крутящего момента через обмотки мотора должны течь максимальные токи, что неизбежно вызовет его перегрев и преждевременный выход из строя.
По этой причине я и спроектировал конструкцию с условием большого запаса по мощности, а ток мотора установил опытным путём чуть больше минимально необходимого. Мотор при этом нагревался до 50-60°С, что вполне допустимо по ТУ.
На этом видео лебёдка легко жонглирует осью Z без рабочего стола, но с двумя катушками филамента весом по 1300 грамм:
Итак, вопрос мощности решён. Теперь поговорим о точности. Учитывая параметры компонентов лебёдки и мотора, при микростеппинге 1/16 возможно перемещение оси Z с шагом 0,02 мм. Теперь рассмотрим проблему точности у лебёдки с однослойной намоткой троса. Радиус приводного барабана в моей конструкции составляет 10 мм, соответственно, длина окружности при намотке будет 62,8 мм. Для того, чтобы поднять ось Z на 44 см, необходимо примерно семь оборотов. При использовании троса толщиной 1 мм осевое смещение намотки составит 7 мм. При этом происходит изменение расстояния от точки соприкосновения троса с барабаном до нижнего опорного блока.
Посчитаем, насколько всё плохо: ведущий барабан находится в центре одной из диагоналей квадрата, образованного нижней частью корпуса принтера. Соответственно, барабан удалён от каждого из нижних опорных блоков на 320 мм. Путём нехитрых расчётов выясняется, что при перемещении стола на 440 мм произойдёт изменение геометрии привода на 0,077 мм.
Качественные винты с трапецевидной резьбой обеспечивают точность от 0,07 до 0,4 мм на таких расстояниях. Проще говоря, не обеспечивают никакого значимого выигрыша по точности. Если же по каким-то причинам Вам необходимо напечатать модели высотой большей, чем 44 см, нужно просто пропорционально увеличить диаметр приводного барабана (для сохранения малого количества оборотов, потребных для перемещения оси) и передаточное число редуктора (для сохранения номинальной нагрузки на мотор). При этом стоимость механизма растёт незначительно, в отличие от конструкции с винтовым приводом.
Один из тестовых объектов:
В заключение могу сказать: хотя опыт и является производной от преодолённых трудностей и совершённых ошибок, но иногда процесс его приобретения доставляет больше удовольствия, чем достигнутые результаты.
3D моделей не будет, ибо я их никак не могу отыскать на диске.



