Потери энергии и кпд асинхронных двигателей
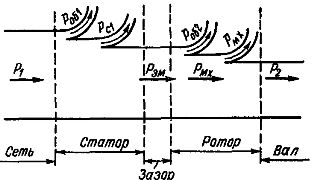
Рис. 1. Энергетическая диаграмма двигателя
Механическая мощность асинхронного двигателя Рмх, развиваемая на валу ротора, меньше электромагнитной мощности Рэм на значение мощности P об2 потерь в обмотке ротора:
Мощность на валу двигателя:
Электромагнитная и механическая мощности равны:
Из этих выражений следует, что мощность потерь в обмотке ротора:

или P об2 = s х P эм
В асинхронных электродвигателях имеются также добавочные потери, обусловленные зубчатостью ротора и статора, вихревыми токами в различных конструктивных узлах двигателя и другими причинами. При полной нагрузке двигателя потери P д принимаются равными 0,5% его номинальной мощности.
Коэффициент полезного действия (КПД) асинхронного двигателя:
Поскольку общие потери зависят от нагрузки, то и КПД асинхронного двигателя является функцией нагрузки.
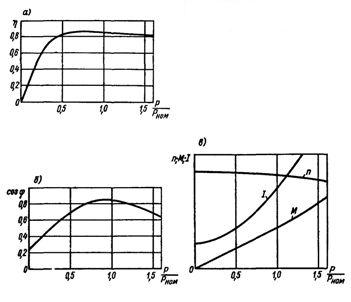
Рис. 2. Рабочие характеристики асинхронного двигателя
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Потери асинхронного электродвигателя.
В асинхронном двигателе, являющемся трёхфазным, возникает два типа потерь. Вот эти потери:
1. Постоянные или фиксированные потери.
2. Переменные потери.
Постоянные или фиксированные потери
Постоянными потерями называют такие потери, которые остаются постоянными в нормальном режиме работы асинхронного двигателя. Такие потери могут быть легко получены путём проведения теста без нагрузки трёхфазного двигателя. Эти потери подразделяются на следующие виды:
1. Потери железа или потери сердечника.
2. Механические потери.
3. Потери трения щёток.
Потери железа или потери сердечника
Данные потери также можно подразделить на гистерезисные потери и потери вихревого тока. Потери вихревого электрического тока минимизируются за счёт использования наслоения на сердечнике. Раз применяется наслоение на сердечнике, область уменьшается, и поэтому увеличивается сопротивление, вследствие чего уменьшаются вихревые токи.
Гистерезисные потери минимизируются при помощи кремнистой стали высокого качества. Потери сердечника зависят от частоты поступаемого напряжения. Частота статора всегда является подающейся частотой, f, а частота ротора является проскальзыванием, умноженным на подающуюся частоту, (sf), которая всегда меньше частоты статора.
Частота статора составляет 50 герц. Частота ротора составляет около 1,5 герц. Так происходит потому, что в нормальном рабочем состоянии проскальзывание составляет 3%. Отсюда потери сердечника ротора очень малы по сравнению с потерями сердечника статора, и ими обычно пренебрегают при рабочих состояниях.
Механические потери и потери трения щёток
Механические потери имеют место быть в подшипнике, потери трения щёток возникают в асинхронном двигателе с обмотанным ротором. Эти потери составляют ноль на старте. По мере того, как возрастает скорость, данные потери увеличиваются. В трёхфазных двигателях скорость обычно остаётся постоянной. Отсюда следует, что и данные потери почти остаются постоянными.
Переменные потери

Эти потери также называются потерями меди. Данные потери происходят из-за электрического тока, идущего по обмоткам статора и ротора. Когда нагрузка меняется, данный электрический ток также изменяется, а потому и потери эти тоже претерпевают изменения. Поэтому их и назвали переменными потерями. Их можно получить при помощи проведения теста с заблокированным ротором трёхфазного двигателя.
Основная функция асинхронного двигателя состоит в том, чтобы преобразовывать электрическую энергию в механическую энергию. В течение данного преобразования одной энергии в другую, энергия проходит через различные этапы. Данная энергия, проходящая через разные ступени, отображается на диаграмме течения энергии.
Как известно, на входе трёхфазного асинхронного двигателя трёхфазная подача. Так что эта трёхфазная подача идёт на статор трёхфазного электродвигателя.
Допустим, Pin = электрическая энергия, которая идёт на статор трёхфазного двигателя,
VL = линейное напряжение, поступающее статору трёхфазного двигателя,
IL = линейный ток,
Cos = коэффициент мощности трёхфазного двигателя.
Вход электрической энергии на статор, Pin = 3VLILcos.
Часть этой энергии на входе используется для поддержки потери статора, которыми являются потери железа статора и потери меди статора. Сохраняющаяся энергия (электроэнергия на входе – потери статора) идёт на ротор как вход на ротор.
Так что вход на ротор, P2 = Pin – потери статора (потери меди статора и потери железа статора). Теперь ротор должен преобразовать этот вход на ротор в механическую энергию, но этот завершённый вход не может быть преобразован в механический выход, поскольку он должен поддерживать потери ротора.
Бывает два типа потерь ротора, а именно потери меди и потери железа. Потери железа зависят от частоты ротора, которая очень мала, когда ротор вращается. Поэтому этим обычно пренебрегают. Так что можно сказать, что ротор имеет лишь потери меди. По этой причине вход на ротор должен поддерживать эти потери меди. После этой поддержки, оставшаяся часть входа ротора, P2 преобразовывается в механическую энергию, Pm.
Допустим, Pc будет потерями меди ротора,
I2 будет током ротора в рабочем состоянии,
R2 – сопротивлением ротора,
Pm – общая производимая механическая энергия.
Pc = 3I22R2
Pm = P2 – Pc
Теперь эта создаваемая механическая энергия идёт на нагрузку за счёт вала, но появляются некоторые механические потери, такие как потери трения и потери сопротивления воздуха. Так что общая воспроизводимая механическая энергия должна быть подана на поддержание этих потерь.
Поэтому выход образуемой энергии идёт на вал, который в конечном итоге подаёт её нагрузке, Pout.
Pout = Pm – механические потери (потери трения, а также потери, связанные с сопротивлением воздуха).
Pout зовется энергией вала. Также его называют полезной энергией.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
Потери и КПД асинхронного электрического двигателя
Во время превращения одной энергии в другую в электродвигателе в виде теплоты неустанно рассеивается их часть. Это и называется потерей. Потери могут быть фиксированными и переменными, а также делятся на еще несколько подвидов.

Постоянные потери асинхронной машины
Трехфазный асинхронный электропривод переменного тока может иметь два вида потерь:
Фиксированные – это те, что не изменяются, если электромотор работает полностью исправно и с нормальной нагрузкой. Их можно получить и в результате холостого прогона агрегата. Они делятся на еще три подвида потерь:
В стали
Такой вид потерь в стали, в свою очередь, может быть гистерезисным или расходом вихревого электротока. Второй типа можно эффективно минимизировать, если использовать наслоение на сердечник. С применением наслоения сокращается участок, что ведет к увеличению сопротивления, а значит сокращение вихревых токов неизбежно.
Первый же тип, гистерезисный, уменьшают, пользуясь высококачественной сталью, в составе которой есть кремний. Почему? Любая потеря связана с частотой напряжения, поступающего в двигатель. Статорная частота всегда подающая, обозначается как f, а вот частотность якоря – это проскальзывание s. Оно умножается на подающую (sf). Якорная частота, в асинхронной машине, надо заметить, всегда будет ниже статорной.
Показатель подающей частоты равен 50 Гц, а вот якорная составляет приблизительно 1,5 Гц. Так получается по той простой причине, что величина проскальзывания равна лишь 3% для нормального рабочего состояния привода. Поэтому и расход в роторе относительно малы, в сравнении с потерей в статоре. Потерями роторного сердечника, обычно, можно спокойно пренебречь.
Механический тип потерь. Трение щеток
Механический вид – это расходы, возникающие в подшипниках, а трения щеток имеют место во всех асинхронных электромоторах, ротор которых обмотан. При запуске машины они являются нулевыми. С увеличением скорости работы агрегата, они тоже растут. В трехфазном движке скорость принимает определенное значение и не меняется на протяжении всего рабочего цикла. Поэтому и данные потери в нем всегда будут постоянными.
Переменный вид потерь
Другое название – расходы меди. Появляются они из-за того, что электроток идет по статорным и роторным обмоткам. При смене нагрузки на движок, электроток тоже меняет значение, что ведет и к изменению величины потерь меди. Это и послужило источником их названия. Получить их можно, если провести тест трехфазного агрегата при заблокированном роторе.
Главная задача асинхронной машины заключается в преобразовании электроэнергии в механическую силу. Пока происходит такая трансформация, одна энергия становится другой, она проходит несколько разных этапов. Эту проходящую ступени преобразования энергию можно изобразить с помощью диаграммы.

Частично двигатель использует ее, чтобы поддерживать статорные расходы: стали и меди. Та часть, которая остается сохранной, поступает к якорю в качестве входа на ротор.
Из этого следует, что вход на ротор равен статорным потерям (P2 = Pin). Теперь сохранившаяся входная энергия должна пройти преобразование и стать механической. Однако, механическим выходом она стать не может, так как он поддерживает потери.
Как мы уже поняли, роторные потери можно разделить на две группы: меди и железа. Последние ничтожно малы, настолько, что ими можно пренебречь. Это связано с тем, что они зависят от роторной частоты, а она составляет примерно 1,5 Гц.
Следуя из вышесказанного, можно смело утверждать, что ротор обладает лишь потерями меди. Так вот, после именно ее поддержки не преобразованная часть электроэнергии, которая осталась становиться механической. Ее обозначают как Pm.
После всего этого, новопреобразованая сила отправляется на нагрузку, чему помогает вал. Но на этом этапе неизбежны уже механические расходы. В их число входит трение и сопротивление в воздухе. Поэтому общая механическая энергия, которая воспроизводиться в электродвигателе обязательно уходит, чтобы поддерживать эти потери.
Так что образованная в итоге энергия отправляется на вал мотора. Ее, в конце концов, подают нагрузке. Обозначается это как Pout. Она носит название энергии вала или, по-другому, полезная.
Pout это и есть механические потери Pm. Они связаны с сопротивлением в воздухе и трением.
Потери мощности и КПД в трехфазном приводе переменного тока
Итак, потери в двигателе могут механическими, магнитными или электрическими.
От питающей сети на статорную обмотку происходит подача мощности Р1. Одна ее часть идет в расход, чтобы покрыть магнитные потери в статорном сердечнике рс1. Используется она и в статорной обмотке, чтобы поддержать электропотери из-за нагретой намотки.
Мощность роторных электропотерь имеет прямую зависимость от скольжения, поэтому асинхронная машина будет работать тем экономичнее, чем меньше будет составлять величина скольжения.
Последнее по очереди, но не по важности – возникновение магнитных потерь. Они тоже возникают в подвижном элементе электромотора, но небольшая электротоковая частота (f2 = f1s) делает их настолько малыми, что ими также можно пренебречь.
Трение частей системы, которые вращаются, о воздух, а также трение, происходящее в подшипнике обуславливает появление механического расхода.
Поля рассеяния наряду с пульсациями в статоре и якоре становятся причиной добавочного вида потерь.
Из всего, что сказано выше, можно собрать формулу общих потерь. Она приведена ниже:
∑р = рс1 + рэ1 + рэ2+ рмех + рд
КПД асинхронной машины
Так как коллектор в двигателе отсутствует, коэффициент полезного действия электроприводов такого типа выше, чем у их «собратьев», питающихся постоянным током. Величина мощности АД прямо влияет на коэффициент. Если нагрузка на агрегат нормальная, то он может составлять до 95%.
Потери в машине постоянного тока
Общие положения
При работе электрической машины часть потребляемой ею энергии теряется бесполезно и рассеивается в виде тепла. Мощность потерянной энергии называют потерями мощности или просто потерями.
Потери в электрических машинах подразделяются на основные и добавочные. Основные потери возникают в результате происходящих в машине основных электромагнитных и механических процессов, а добавочные потери обусловлены различными вторичными явлениями. Во вращающихся электрических машинах основные потери подразделяются на 1) механические потери, 2) магнитные потери, или потери в стали, и 3) электрические потери.
К электрическим потерям относятся потери в обмотках, которые называют также потерями в меди, хотя обмотки не всегда изготавливаются из меди; потери в регулировочных реостатах и потери в переходном сопротивлении щеточных контактов.
Рассматриваемые в данной теме вопросы большей частью являются общими для машин постоянного и переменного тока.
Механические потери
Механические потери pмх состоят из 1) потерь в подшипниках, 2) потерь на трение щеток о коллектор или контактные кольца и 3) вентиляционных потерь, которые включают в себя потери на трение частей машины о воздух и другие потери, связанные с вентиляцией машины (мощность кинетической энергии отходящего воздуха и потери в вентиляторе). В ряде случаев электрические машины охлаждаются не воздухом, а водородом или водой, и соответствующие потери также относят к вентиляционным.
Потери в подшипниках pподш вычисляют по соотношениям, которые рассматриваются в курсах деталей машин и проектирования электрических машин. Эти потери зависят от типа подшипников (качения или скольжения), от состояния трущихся поверхностей, вида смазки и так далее. Важно подчеркнуть, что при работе данной машины эти потери зависят только от скорости вращения и не зависят от нагрузки.
Потери на трение щеток могут быть вычислены по формуле
где kтр – коэффициент трения щеток о коллектор или контактные кольца (kтр = 0,15 – 0,3); fщ – удельное (на единицу площади) давление на щетку; Sщ – контактная поверхность всех щеток; vк – окружная скорость коллектора или контактных колец.
Потери на вентиляцию pвент зависят от конструкции машины и рода вентиляции. Подробности расчета этих потерь рассматриваются в курсах проектирования электрических машин. В случае если вентиляция осуществляется не встроенным в машину, а отдельно стоящим вентилятором, потери на вентиляцию машины включают в себя потребляемую мощность привода вентилятора.
В самовентилируемых машинах со встроенным центробежным вентилятором потери на вентиляцию в ваттах иногда вычисляются приближенно по следующей эмпирической формуле:
где Q – количество воздуха, прогоняемого через машину, м³/с; v – окружная скорость вентиляционных крыльев по их внешнему диаметру, м/с.
Так как Q также пропорционально v, то из выражения (2) следует, что потери pвент пропорциональны третьей степени скорости вращения машины.
Общие механические потери
Как следует из изложенного, в каждой данной машине потери pмх зависят только от скорости вращения и не зависят от нагрузки. В машинах постоянного тока мощностью 10 – 500 кВт потери pмх составляют соответственно 2 – 0,5% от номинальной мощности машины.
Магнитные потери
Магнитные потери pмг включают в себя потери на гистерезис и вихревые токи, вызванные перемагничиванием сердечников активной стали. Для вычисления этих потерь сердечник подразделяется на части, в каждой из которых магнитная индукция постоянна. Например, в машинах постоянного тока вычисляются отдельно потери в сердечнике якоря
Здесь p1,0/50 и p1,5/50 – удельные потери в стали на единицу массы при частоте f = 50 Гц и индукциях соответственно B = 1,0 Т и B = 1,5 Т; Bа и Bz – средние значения индукции в спинке якоря и зубцах; Gса и Gcz – массы стали спинки якоря и зубцов; kда и kдz – коэффициенты, учитывающие увеличение потерь вследствие обработки стали (наклеп при штамповке, замыкание листов в пакете), из-за неравномерности распределения индукции и несинусоидальности закона изменения индукции во времени.
В машинах постоянного тока можно принять kда = 3,6 и kдz = 4,0.
К магнитным потерям относят также такие добавочные потери, которые зависят от значения основного потока машины (потока полюсов) и вызваны зубчатым строением сердечников. Эти потери иногда называют также добавочными потерями холостого хода, так как они существуют в возбужденной машине уже при холостом ходе.
К указанным потерям в машинах постоянного тока относятся прежде всего поверхностные потери pпов в полюсных наконечниках, обусловленные зубчатостью якоря. Ввиду наличия зубцов и пазов на вращающемся якоре магнитная индукция в каждо точке поверхности полюсного наконечника пульсирует (смотрите рисунок 1) с частотой
будучи максимальной, когда против рассматриваемой точки находится зубец якоря, и минимальной, когда против этой точки находится паз якоря. Вследствие этого в полюсных наконечниках индуктируются вихревые токи, причем они протекают только в тонком поверхностном слое, так как fz имеет порядок тысячи и более герц. Эти потери зависят от 1) величины пульсации, которая больше при открытых пазах на якоре, 2) частоты пульсаций fz и 3) толщины листов стали полюсов и степени их изолированности друг от друга на поверхности наконечника полюса.
Если пазы имеются также в полюсных наконечниках машины постоянного тока (при наличии компенсационной обмотки), то в зубцах якоря и полюсах в результате их взаимного перемещения возникают пульсации магнитного потока. Потоки в зубцах максимальны, когда зубец якоря расположен против зубца полюса, и минимальны, когда против зубца расположен паз. Частота этих пульсаций также велика. При этом возникают пульсационные потери pпульс в зубцах и поверхностные потери также на внешней поверхности якоря.
Подобные же поверхностные и пульсационные потери, вызванные зубчатым строением сердечников и зависящие от основного магнитного потока, возникают также в машинах переменного тока. Потери pпов и pпульс вычисляются по формулам, которые приводятся в курсах проектирования электрических машин.
К добавочным потерям холостого хода относятся также потери, которые возникают в проволочных бандажах, обмоткодержателях и в других деталях при вращении в магнитном поле полюсов.
Общие магнитные потери
Электрические потери
Электрические потери pэл в каждой обмотке вычисляют по формуле pэл = I² × r. Сопротивление обмотки зависит от температуры. Поэтому ГОСТ 25941-83 предусматривает определение потерь в обмотках при приведении их к рабочей температуре (75°C для классов обмоток A, E и B и 115°C для классов F и H). В нормальных машинах постоянного тока имеются две электрические цепи: цепь якоря и цепь возбуждения. Поэтому обычно рассматривают потери в цепи якоря pэл.а и в цепи возбуждения pэл.в.
Потери в обмотках можно выразить также через плотность тока в обмотке j и массу обмотки (без изоляции) G. Действительно,

где l – общая длина проводников обмотки; s – сечение проводника; γ – плотность проводника; ρ – удельное сопротивление.
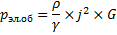
Например, для меди γ = 8,9 г/см³ и при 75°C ρ = 1/4600 Ом×мм ²/см. Если выразить, далее, j в А/мм², то получим
Таким образом, формула (7) определяет потери в ваттах в медной обмотке массой G кг при 75°C и при плотности тока j А/мм².
К электрическим потерям относят также потери в регулировочных реостатах и потери в переходных сопротивлениях щеточных контактов. Потери в переходных сопротивлениях щеточных контактов для щеток одной полярности вычисляются по формуле
где ΔUщ – падение напряжения на один щеточный контакт. Так как ΔUщ зависит сложным образом от разных величин и факторов, то для упрощения расчетов, согласно ГОСТ 11828-86, «Машины электрические вращающиеся. Общие методы испытаний», принимается для угольных и графитовых щеток ΔUщ = 1 В и для металлоугольных щеток ΔUщ = 0,3 В.
Добавочные потери
Добавочные потери pд. К этой группе относят потери, вызванные различными вторичными явлениями при нагрузке машины. Поэтому указанные потери, зависящие от тока нагрузки, называют иногда также добавочными потерями при нагрузке.
В машинах постоянного тока одна часть рассматриваемых потерь возникает вследствие искажения кривой магнитного поля в воздушном зазоре при нагрузке под влиянием поперечной реакции якоря. В результате этого магнитный поток распределяется по зубцам и сечению спинки якоря неравномерно: с одного края полюсного наконечника индукция в зубцах и спинке якоря уменьшается, а с другого края увеличивается. Такое неравномерное распределение потока вызывает увеличение магнитных потерь, подобно тому как неравномерное распределение тока в проводнике (например, в результате поверхностного эффекта) вызывает увеличение электрических потерь. Вследствие такого неравномерного распределения потока увеличиваются также поверхностные потери в полюсных наконечниках. При наличии компенсационной обмотки рассмотренная часть добавочных потерь практически отсутствует.
Другая часть добавочных потерь в машинах постоянного тока связана с коммутацией. При изменении во времени потоков рассеяния коммутируемых секций (смотрите рисунок 2) в проводниках обмотки индуктируются вихревые токи. Добавочный ток коммутации также вызывает дополнительные потери. Существуют также другие причины возникновения добавочных потерь (вихревые токи в крепежных деталях и тому подобное).
Вследствие сложной природы добавочных потерь формулы для их вычисления получаются сложными и, кроме того, не особенно точными. Экспериментальное определение этих потерь также затруднительно. Поэтому на практике добавочные потери чаще всего оценивают на основе опытных данных в виде определенного процента от номинальной мощности. Согласно ГОСТ 11828-86, эти потери для машин постоянного тока при номинальной нагрузке принимаются: при отсутствии компенсационной обмотки равными 1,0% и при наличии компенсационной обмотки равными 0,5% от отдаваемой мощности для генератора и подводимой мощности двигателя. Для других нагрузок эти потери пересчитываются пропорционально квадрату тока нагрузки.
Все виды добавочных потерь, не связанные непосредственно с электрическими процессами в цепях обмоток машины, покрываются за счет механической мощности на валу машины.
Суммарные, или полные потери
Суммарные, или полные потери pΣ представляют собой сумму всех потерь:
В качестве иллюстрации в таблице 1 приводятся данные о потерях в машине постоянного тока при номинальной нагрузке.
Потери в генераторе постоянного тока 500 кВт, 460 В, 375 об/мин.



