Большая Энциклопедия Нефти и Газа
Система полуавтоматического управления предусматривает автоматическое управление отдельными группами технологических операций. В этом случае все операции разбивают на несколько групп. Операции каждой группы производятся соответствующими механизмами. [1]
Система полуавтоматического управления с использованием таймера применяется для управления работой механизмов при сборке покрышек. В этом случае весь процесс сборки разделен на группы операций, которые выполняются соответствующими механизмами в установленной последовательности. [2]
При оценке систем полуавтоматического управления с исполнительными механизмами и промежуточными реле необходимо учитывать, что серводвигатели и моторные реле времени требуют тщательной регулировки для шунтирования пусковых сопротивлений через такие интервалы, которые соответствовали бы фирменной характеристике двигателя. [3]
На действующих ТЭС, где для выполнения системы полуавтоматического управления ВПУ необходимы значительные переделки существующих технологических схем, можно ограничиваться пооперационным управлением. [7]
При изучении деятельности оператора в режиме слежения в системе полуавтоматического управления возникает необходимость в выборе объективного критерия оценки эффективности работы оператора. Отличительная особенность слежения, как вида операторской деятельности, состоит в том, что оператор должен в точности воспроизводить предлагаемый сигнал. Но в результате воспроизведения предлагаемого сигнала возникает ошибка исполнения, которая не предусмотрена данной деятельностью, но всегда ей присуща. Поэтому в данной работе предлагается принять в качестве критерия оценки величину ошибки выполнения оператором какой-либо операции. В этой постановке оператор рассматривается как генератор ошибки, именно ошибка служит интегральным показателем индивидуальных различий операторов. Анализ ошибок оператора в таком виде деятельности, как слежение, показал, что они не являются постоянными величинами, а изменяются в зависимости от характеристик предъявляемого сигнала, степени сложности выполняемой задачи, от условий труда, состояния нервной системы, индивидуальных особенностей оператора, степени его обученности и ряда других факторов. Многофакторность и сложная иерархическая структура их влияния, степень взаимодействия обусловливают случайность ошибки оператора. [8]
К преимуществам станка можно отнести наличие специальных механизмов и системы полуавтоматического управления операциями сборки, обеспечивающих стабильное качество этих операций; универсальность, позволяющая собирать большой ассортимент покрышек ( по посадочному диаметру борта и профилю); высокая производительность при значительном облегчении условий труда сборщика. [9]
Авиация получит большое число новейших турбовинтовых и турбореактивных самолетов: наряду с широко известными ТУ-104, АН-10, ИЛ-18 также и новые мощные самолеты ИЛ-62, ТУ-154 для дальних линий и ТУ-134, ЯК-40, БЕ-30 и другие для местных линий. На линиях союзного значения аэропорты оборудуются системами автоматического и полуавтоматического управления заходом на посадку и современными средствами радиотехнического оборудования для управления движением самолетов. [11]
полуавтоматическое управление
3.9 полуавтоматическое управление: Управление, при котором часть операций цикла включает оператор, а часть осуществляется в автоматической последовательности.
2.4 полуавтоматическое управление : Приведение в действие системы оповещения и управления эвакуацией людей диспетчером (оператором) при получении командного сигнала от автоматических установок пожарной сигнализации или пожаротушения.
Полезное
Смотреть что такое «полуавтоматическое управление» в других словарях:
Полуавтоматическое управление — Приведение в действие СОУЭ диспетчером при получении командного импульса от автоматических установок пожарной сигнализации или пожаротушения. Источник: НПБ 104 03 EdwART. Словарь терминов и определений по средствам охранной и пожарной защиты,… … Словарь черезвычайных ситуаций
полуавтоматическое управление — — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом EN auto manual control … Справочник технического переводчика
Полуавтоматическое управление пожарным оповещением — Полуавтоматическое управление приведение в действие СОУЭ диспетчером при получении командного импульса от автоматических установок пожарной сигнализации или пожаротушения. Источник: Приказ МЧС РФ от 20.06.2003 N 323 (ред. от 07.02.2008) Об… … Официальная терминология
Ручное управление — способ управления полетом летательного аппарата, при котором изменение режима полета путём отклонения органов управления осуществляется лётчиком с помощью рычагов управления. По степени автоматизации Р. у. подразделяют на прямое Р. у., Р. у. с… … Энциклопедия техники
ГОСТ 31335-2006: Оборудование технологическое для литейного производства. Оборудование для дробеметной, дробеструйной и дробеметно-дробеструйной обработки. Требования безопасности — Терминология ГОСТ 31335 2006: Оборудование технологическое для литейного производства. Оборудование для дробеметной, дробеструйной и дробеметно дробеструйной обработки. Требования безопасности оригинал документа: 3.2 абразивный материал:… … Словарь-справочник терминов нормативно-технической документации
СП 3.13130.2009: Системы противопожарной защиты. Система оповещения и управления эвакуацией людей при пожаре. Требования пожарной безопасности — Терминология СП 3.13130.2009: Системы противопожарной защиты. Система оповещения и управления эвакуацией людей при пожаре. Требования пожарной безопасности: 2.1 автоматическое управление : Приведение в действие системы оповещения и управления… … Словарь-справочник терминов нормативно-технической документации
Грейферный ковш — У этого термина существуют и другие значения, см. Грейфер. Двухканатный грейфер на экскаваторе Грейфер (нем. Greifer, от greifen xватать) гр … Википедия
Сваебойное оборудование — предназначено для установки (наведения) Сваи, её ориентирования, фиксации и погружения. Может использоваться и для извлечения свай из грунта (сваевыдёргиватели). С. о. состоит из грузоподъёмного органа и погружателя, обычно… … Большая советская энциклопедия
полуавтомати́ческий — ая, ое. прил. к полуавтомат; являющийся полуавтоматом. Полуавтоматическая винтовка. Полуавтоматический станок. || Осуществляемый при помощи полуавтомата. Полуавтоматическое управление. Полуавтоматическая телефонная сеть … Малый академический словарь
Semiautomatic ink pumping — Подача краски с помощью насоса, имеющего полуавтоматическое управление … Краткий толковый словарь по полиграфии
Что такое полуавтоматическое управление




§ 4.3. Полуавтоматические системы управления и системы дистанционного управления роботами
Полуавтоматические системы дистанционного управления манипуляторами отличаются от копирующих другим характером задающего устройства и наличием вычислителя. В них вместо многозвенного механизма, повторяющего кинематику рабочего манипулятора, применяется управляющая рукоятка с несколькими степенями свободы. Вместо сложных движений при копирующем способе здесь человек-оператор производит только легкое нажатие на рукоятку в требуемом направлении. Конфигурация управляющей рукоятки не обязательно должна соответствовать кинематике рабочего манипулятора. Она может быть произвольной, исходя из удобства воздействия на нее руки человека. Более того, рукоятка может совсем не иметь механических перемещений, т. е. могут восприниматься только усилия нажатия от руки человека. Сигналы от управляющей рукоятки поступают в микропроцессорное вычислительное устройство, где они преобразуются по определенным алгоритмам, в результате чего формируются сигналы управления, подаваемые на все приводы звеньев рабочего манипулятора (рис. 4.13).

Рис. 4.13. Схема полуавтоматической системы дистанционного управления манипулятором
В такой полуавтоматической системе благодаря наличию микропроцессорного вычислительного устройства (см. рис. 4.3) могут быть реализованы самые разнообразные алгоритмы управления и осуществляться движения в любой системе координат независимо от кинематики манипулятора и конфигурации управляющей рукоятки. Наиболее типичными являются три вида алгоритмов управления: скоростной, силовой и позиционный. Они предполагают регулирование соответственно скорости, силы и перемещения на рабочем конце манипулятора пропорционально величине нажатия руки человека на управляющую рукоятку.
При формировании сигналов управления в микропроцессорном вычислителе для повышения качества процесса управления по правилам теории автоматического регулирования в закон управления могут добавляться производные и интегралы от основного сигнала, пропорционального величине смещения управляющей рукоятки. Вместо этого, если в манипуляторе ставятся следящие приводы, требуемое качество процесса управления может достигаться также внутренними обратными связями и дифференцированиями в самой следящей системе каждого привода.
При силовом алгоритме управления весь процесс снятия сигналов с управляющей рукоятки и преобразования их в микропроцессорном вычислителе с последующим формированием сигналов управления приводами рабочего манипулятора происходит аналогично. Но существенное отличие состоит в том, что пропорционально общему смещению управляющей рукоятки создается сила, как бы тянущая за схват манипулятора, чем и определяется его движение. Непосредственно эта сила реализуется при соприкосновении схвата или инструмента с каким-либо внешним предметом. Эта сила по величине и направлению соответствует общему смещению рукоятки.
Поскольку управляющая рукоятка подпружинена по каждой степени подвижности, то смещение ее пропорционально силе нажатия руки человека на эту рукоятку. Следовательно, можно сказать, что сила, образующаяся на конце рабочего манипулятора, пропорциональна по величине и одинаково направлена с силой нажатия человека на рукоятку. А подпружинена рукоятка просто для того, чтобы возвращалась в исходное положение, когда человек перестанет на нее нажимать.
Наконец, при позиционном алгоритме управления также происходит аналогичная процедура преобразований и формирований. Но разница состоит в том, что в результате создается смещение конца рабочего манипулятора, пропорциональное смещению управляющей рукоятки от руки человека-оператора.
Обычно средство переключения алгоритмов управления выводится на пульт управления. Однако в некоторых случаях проведения определенных манипуляционных работ удается организовать в системе автоматическое переключение алгоритмов управления по соответствующим сигналам датчиков (приближения к объекту и соприкосновения с ним).
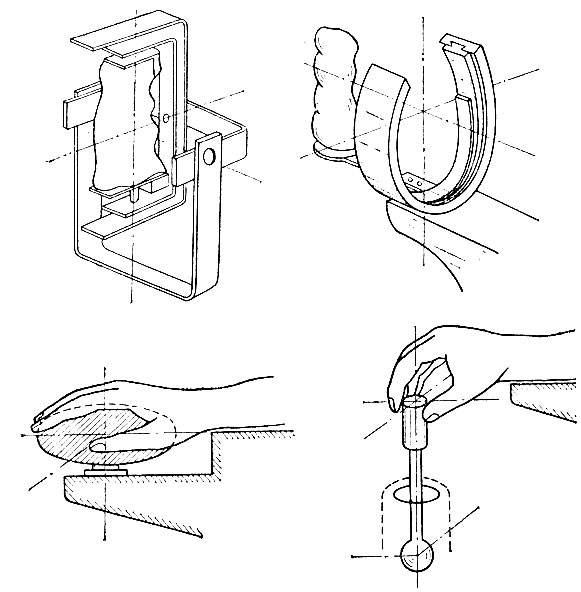
Рис. 4.14. Разновидности управляющих рукояток
Управляющие рукоятки имеют самые различные принципы построения и конфигурации. Некоторые из них представлены на рис. 4.14. Число управляющих перемещений рукоятки должно быть равным числу степеней подвижности рабочего манипулятора, но с произвольной кинематической схемой, удобной для реализации рукоятки и работы человека-оператора с ней. Конструктивно необходимо обеспечить малость управляющих перемещений с точным съемом соответствующего электрического сигнала, пропорционального перемещению.
Упомянутые ранее управляющие рукоятки без механических перемещений снабжаются тензорезисторными измерителями силы нажатия руки человека (рис. 4.15). При этом число сигналов, снимаемое с таких измерителей, поставленных в различных направлениях на рукоятке, тоже должно соответствовать числу степеней подвижности рабочего манипулятора. Здесь, так же как и при механической схеме рукоятки, может реализоваться любой из трех основных алгоритмов дистанционного управления.
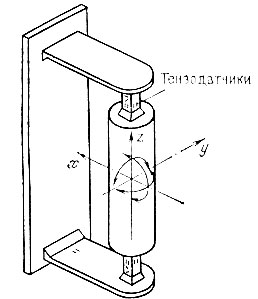
Рис. 4.15. Управляющая рукоятка без механических перемещений
Во всех случаях человек-оператор следит визуально за эффектом своих действий по фактическому результирующему движению рабочего манипулятора (на телевизионном экране или непосредственно через стекло) и корректирует это движение дистанционно с помощью той же управляющей рукоятки.
Заметим, что при силовом алгоритме управления человек-оператор ощущает на рукоятке реальные усилия взаимодействия рабочего манипулятора с объектом своей работы (в определенном масштабе). Эта дополнительная информация вместе с визуальной значительно увеличивает эффективность проведения работ. Как и в копирующих системах двустороннего действия, это именуется эффектом присутствия.
Перейдем к рассмотрению дистанционного управления роботами. Внутренние системы управления роботом аналогичны рассмотренным в предыдущих главах (программные и адаптивные). Дополнительно теперь к ним присоединяется дистанционная система управления. В комплексе они образуют единую многоканальную систему. Как уже говорилось, существуют два рода таких систем: супервизорные и диалоговые (интерактивные).
Супервизорное управление заключается в следующем. На пульте управления человека-оператора имеются дисплейное (телевизионное) и другие устройства и приборы отображения обстановки в рабочем пространстве робота (рис. 4.16). Здесь действует канал информационной дистанционной связи робота с человеком. Оператор, наблюдая таким образом обстановку и действия робота, принимает решения о подаче тех или иных управляющих команд в зависимости от сложившейся обстановки. ЭВМ робота, получив команду, исполняет ее по соответствующей программе. Набор различных программ заранее придается роботу. Каждая программа набора соответствует автоматическому выполнению роботом определенной операции. Поэтому человеку-оператору отводится функция распознавания обстановки и выдачи ЭВМ робота задания на определенную операцию, которая роботом затем самостоятельно исполняется. В этом состоит смысл супервизорного дистанционного управления действиями робота со стороны человека-оператора.
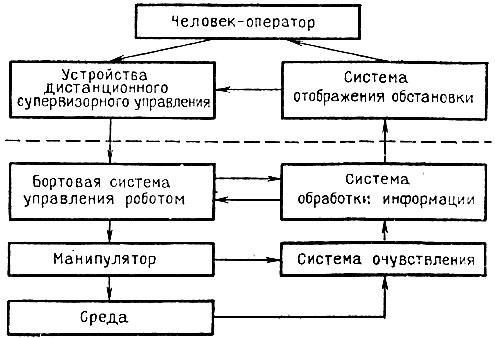
Рис. 4.16. Схема дистанционного супервизорного управления роботом
В других случаях супервизорная команда может выражаться в виде целеуказания. Например, световым карандашом на экране телевизора (дисплея) можно указать точку, в которую должен переместиться схват манипулятора робота и взять там заданный предмет, что автоматически роботом и осуществляется.
Оба канала дистанционной связи (информационный и управляющий), как правило, должны быть снабжены микро-ЭВМ или микропроцессорными устройствами для обработки информации с целью ее наилучшего отображения на пульте оператора и для формирования программ и целеуказательных сигналов управления по командам человека-оператора.
Диалоговая (интерактивная) система управления представляет собой следующую ступень совершенства дистанционного управления роботами. Мы видели, что при супервизорном управлении роль принятия решения о действиях робота в той или иной обстановке целиком принадлежит человеку, а робот только выполняет его предписания. В системе же диалогового управления робот, обладая свойствами адаптации к обстановке или даже элементами искусственного интеллекта, может выдавать рекомендации человеку-оператору по возможным способам действия и их числовым характеристикам, исходя из заложенного в память робота задания и на основании результатов оценивания им обстановки в зоне его действия (рис. 4.17). Робот может опротестовывать неосторожные и приводящие к опасным результатам действия человека-оператора. Робот может запрашивать человека о помощи, если ему недостает данных для выполнения требуемой операции.
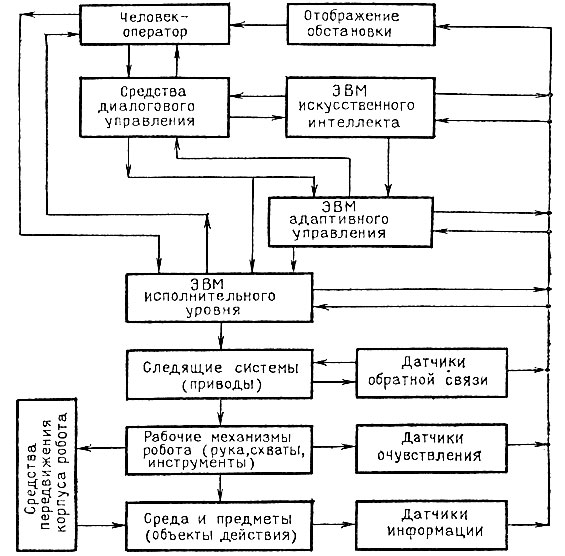
Рис. 4.17. Схема диалогового (интерактивного) дистанционного управления роботом
В диалоговой системе дистанционного управления роботом возрастает роль информационной и вычислительной техники, а также гибкого системного программного обеспечения. В такой системе задания роботу со стороны человека-оператора осуществляются в более общей форме, чем при супервизорам управлении, где робот не имеет «думающих» функций. Общение робота с человеком здесь может происходить на языке, близком к естественному. Оно может быть доведено даже непосредственно до естественного языка человека, вплоть до разговорного.
Возможны различные принципы построения диалоговых дистанционных систем управления и их практические реализации. Робот может иметь комплексы средств очувствления (сенсорных систем) разного уровня для восприятия внешней среды. Такие средства были описаны в § 2.3 и 2.4. Но здесь могут использоваться и другие средства, определяющие физические свойства среды. Уровень обработки информации в ЭВМ робота тоже может быть различным, что определяется выполняемой задачей. Другими словами, может осуществляться различный уровень интеллекта робота в соответствии с требованиями описанной выше диалоговой работы человека-оператора с ЭВМ робота по дистанционным каналам.
На рис. 4.17 показаны два варианта диалоговой работы оператора и робота с элементами искусственного интеллекта или адаптивным управлением. Показана также возможность прямой посылки сигналов на нижний уровень управления роботом.
Итак, в экстремальных условиях роботы имеют дистанционную связь с человеком-оператором, во-первых, для отображения на его пульте обстановки и действий робота в рабочем пространстве и, во-вторых, для автоматического выполнения всех операций роботом по заданиям оператора, даваемым средствами супервизорного или диалогового управления.
Однако не всегда возможно все операции автоматизировать. В тех случаях, когда невозможно или нецелесообразно программировать и автоматически выполнять все элементы операций, которые предстоит проделать в экстремальных условиях роботу, применяются комбинированные системы с автоматическим и ручным дистанционным управлением (копирующим или полуавтоматическим). В этом случае программируется все, что возможно реализовать в программном обеспечении для автоматических действий. Для выполнения же остальных элементов операций, особенно в изменяющихся или непредвиденных (в частности, аварийных) ситуациях, дополнительно подключается либо копирующая, либо полуавтоматическая система дистанционного управления (рис. 4.18).
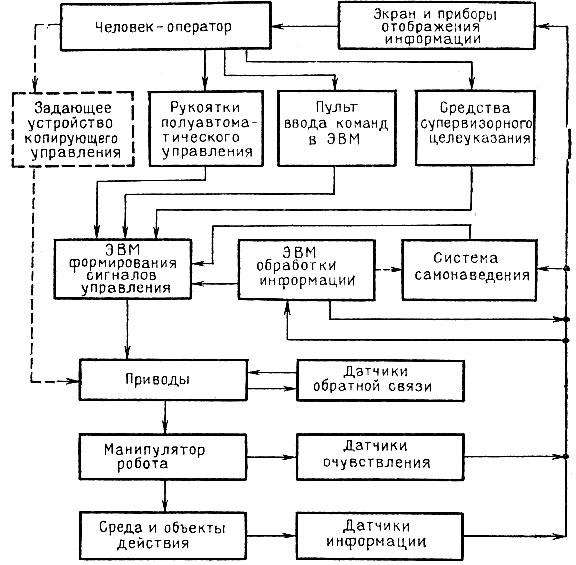
Рис. 4.18. Комбинированная система дистанционного управления роботом
Подключение этого дополнительного дистанционного управления производится человеком-оператором в нужные моменты времени, определяемые им на основе дистанционного наблюдения за обстановкой в рабочем пространстве и за действиями робота в нем. При этом оператор отключает автоматическую систему и берет в свои руки управление (в копирующем или полуавтоматическом вариантах) лишь на некоторое время, после чего снова включает автоматические режимы действий робота.
Следовательно, одна из основных социальных задач робототехники решается именно путем применения дистанционно управляемых роботов, освобождающих человека-оператора от выполнения напряженных механических двигательных функций и от работ в экстремальных условиях.
Дистанционно управляемые роботы с супервизорной системой управления получают применение для подводных технических работ, когда основные элементы операций для робота поддаются программированию. А из комплекса программ для отдельных операций человек-оператор, переключая их, может составлять различные комбинации, соответствующие поставленной задаче, в зависимости от наблюдаемой им дистанционно подводной обстановки. То же относится и ко всем другим экстремальным условиям, охарактеризованным в §4.1.
Полуавтоматическое управление
Режим полуавтоматического управления с постоянной скоростью используется для быстрого переброса антенны по азимуту и углу места.
Режим включается установкой рукояток управления блока Т-55М2 в одно из крайних положений. В работе принимают участие (вклейка 3):
1. Электрические мосты азимута и угла места, состоящие из вторичной обмотки трансформатора, переменных резисторов и резисторов.
2. Сервоусилители азимута и угла места (Л55-2 и Л55-1).
3. Двигатели полуавтоматического управления М55-4 и М55-3.
4. Элементы, участвующие в работе при ручном управлении антенной.
Схемы полуавтоматического управления по азимуту и углу места аналогичны, поэтому рассмотрим работу схемы только по каналу азимута).
При повороте рукояток управления вращение через дифференциал передается к микровыключателю В55-10 и движку переменного резистора R55-13. В крайнем положении рукояток срабатывает микровыключатель В55-10, а движок переменного резистора находится в одном из крайних положений. Электрический мост разбалансируется. С движка переменного резистора R55-13 напряжение переменного тока постоянной амплитуды частотой 400 Гц, фаза которого определяется направлением поворота рукояток управления, через контакты реле Р55-2, Р55-12, Р55-6, переменный резистор «ПОЛУАВТ. ПОСТ. СКОР. АЗ», контакты тумблера «КРУГОВОЙ – УСКОР. КРУГОВОЙ» в положении «КРУГОВОЙ», контакты микровыключателя В55-10, контакты реле Р55-1 и тахометрическую обмотку двигателя М55-4 будет подано на вход сервоусилителя азимута. Сервоусилитель представляет собой двухтактный усилитель, собранный по трансформаторной схеме. Нагрузкой его является управляющая обмотка двигателя полуавтоматического управления М55-4.
На обмотку возбуждения двигателя подается переменное напряжение 36 В, 400 Гц. Под воздействием приложенных напряжений ротор двигателя начинает вращаться. Так как амплитуда напряжения, приложенного к управляющей обмотке, постоянна, то скорость вращения ротора также будет постоянной. Направление вращения ротора двигателя определяется фазой напряжения, поступающего с сервоусилителя.
На тахометрической обмотке двигателя будут действовать напряжение обратной связи, пропорциональное скорости вращения ротора двигателя и напряжение, поступающее с движка переменного резистора R55-13. Благодаря воздействию этих напряжений, вращение ротора двигателя стабилизируется.
Ротор двигателя через редуктор поворачивает ротор дифференциального сельсина М55-2 и поэтому он оказывается все время рассогласованным с сельсин–датчиком М2-33 и сельсин–трансформатором М55-1. На роторной обмотке сельсин–трансформатора будет действовать напряжение сигнала ошибки, которое через переменный резистор «АЗИМ. УСИЛ. РУЧН.» поступает на усилитель и катодный повторитель панели управления.
Для включения режима полуавтоматического управления движением антенны по углу места необходимо повернуть рукоятки управления до упора в верхнее или нижнее положение. При этом сработает микровыключатель В55-1 и замкнет цепь подачи напряжения с электрического моста угла места (движка переменного резистора R55-10) на вход сервоусилителя.
Так как перемещение антенны по углу места ограничено в пределах от минус 01–50 до плюс 14–30, в схеме управления антенной по углу места предусмотрено ограничение пределов работы. При подходе антенны к нижнему или верхнему упорам срабатывают микровыключатели, замыкающие цепь подачи напряжения +27 В или –27 В на один из входов УПТ канала угла места.
В результате этого антенна отбрасывается от упоров, а напряжение
Регулировка скорости вращения антенны осуществляется переменными резисторами «ПОЛУАВТ. ПОСТ. СКОР. АЗ» и «ПОЛУАВТ. ПОСТ. СКОР. УМ». Они устанавливаются так, чтобы скорость движения антенны составляла 20 град/с. Режим выключается отделением рукояток управления от крайних положений.
Режим полуавтоматического управления с переменной скоростью используется как для обнаружения, так и для сопровождения целей по визирному устройству. В этом режиме работают те же элементы, что и в режиме полуавтоматического управления с постоянной скоростью. Работа по азимуту и углу места одинакова, поэтому рассмотрим работу канала азимута.
Режим включается при вытягивании на себя ручек «ПОЛУАВТ. АЗ» и «ПОЛУАВТ. УМ». При выдвижении на себя ручки «ПОЛУАВТ. АЗ» срабатывает микровыключатель В55-12 и замыкает цепь питания реле Р55-12, рукоятки управления блока Т-55М2 устанавливаются в среднее положение и подпружиниваются.
Реле Р55-12 своими контактами подключает движок переменного резистора R55-13, входящего в состав электрического моста азимута, через нормально замкнутые контакты реле Р55-1 и тахометрическую обмотку двигателя М55-4 ко входу сервоусилителя. При среднем положении рукояток управления электрический мост сбалансирован, напряжение, снимаемое с движка R55-13, равно нулю. При повороте рукояток управления движок переменного резистора R55-13 будет также перемещаться, напряжение, снимаемое с него, будет пропорционально углу поворота рукояток, а фаза определяется направлением поворота. Это напряжение усиливается сервоусилителем и прикладывается к управляющей обмотке двигателя. Дальнейшая работа схемы аналогична работе в режиме полуавтоматического управления с постоянной скоростью. При отпускании рукояток управления они самостоятельно устанавливаются в среднее положение и движение антенны прекращается.
При выдвижении на себя рукоятки «ПОЛУАВТ. УМ» срабатывает микровыключатель В55-13 и замыкает цепь питания реле Р55-13. Работа схемы происходит так же, как и по азимуту.
Для выключения режима необходимо ручки «ПОЛУАВТ. АЗ» и «ПОЛУАВТ. УМ» утопить.
Полуавтоматическое сопровождение цели по визирному устройству используется при работе ЗСУ во втором режиме.
При работе в этом режиме дальность до цели определяется РЛС автоматически, угловые координаты – с помощью визирного устройства путем точного совмещения перекрестия основного визира с целью. Управление положением головки основного визира, а значит и антенны, осуществляется рукоятками управления блока Т-55М2, СУА при этом работает в режиме полуавтоматического управления с переменной скоростью.

Для получения требуемой величины отраженных сигналов на входе автодальномера, обеспечивающих автосопровождение цели по дальности, необходимо, чтобы АВС работала на пеленговый облучатель.
Таким образом, для обеспечения нормальной работы ЗСУ в этом режиме необходимо:
осуществлять автосопровождение цели по дальности;
непрерывно удерживать антенну в направлении на цель;
включать режим полуавтоматического управления антенной с переменной скоростью;
к волноводному устройству подключать пеленговый облучатель и осуществлять доворот антенны.
Эти задачи решаются следующим образом:
1. Тумблер В55-7 « I РЕЖИМ – II РЕЖИМ» ставится в положение
2. Ручки «ПОЛУАВТ. АЗ» и «ПОЛУАВТ. УМ» вытягиваются на себя.
3. Нажимается кнопка «АВТОМАТ» и включается режим автоматического сопровождения по дальности, система управления антенной при этом в режим автосопровождения не переводится, а работает в полуавто-матическом режиме.
Режим полуавтоматического сопровождения по визирному устройству используется в случае невозможности автоматического сопровождения цели по угловым координатам.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет



