«Радиолокация для всех»: просто о сложном
В начале июня в свет вышла научно-популярная книга «Радиолокация для всех». Коллектив авторов под руководством генконструктора концерна «Вега», члена-корреспондента РАН, Владимира Вербы успешно справился с нелегкой задачей – рассказать просто о сложном.
Радиолокация с момента своего возникновения, в первую очередь, была нацелена на решение военных задач, но сегодня без ее помощи человек не может обходиться и в своей повседневной жизни – это мобильная связь, авиаперелеты, медицинская диагностика и многое другое. Данное издание может заинтересовать даже тех, кто совсем далек от радиотехники. Пролистаем книгу вместе и расскажем вкратце об основных понятиях, физических основах радиолокации и структуре РЛС.
Первые эксперименты: радиоволны в открытом море
Термин «радиолокация» происходит от двух латинских слов: «radiare», которое означает «излучать», и «locatio» – «размещение, расположение». Сложение этих двух слов позволяет трактовать, что радиолокация занимается определением местоположения различных объектов по излученным от них сигналам.
Это самое общее толкование слова «радиолокация». Более точной формулировкой будет следующая. Под радиолокацией понимают область радиоэлектроники, которая занимается разработкой методов и технических устройств (систем), предназначенных для обнаружения и определения координат и параметров движения различных объектов с помощью радиоволн.
С помощью радиолокации обеспечивается решение широкого круга задач, связанных с обнаружением воздушных и наземных объектов (целей), навигацией (обеспечением вождения) различных судов (воздушных и морских), с управлением воздушным и морским движением, управлением средствами ПВО, с обеспечением безопасности движения транспортных средств, с предсказанием возникновения погодных явлений, а также с поражением наземных (морских) и воздушных объектов в любое время суток и в любых метеоусловиях. Помимо этого, основываясь на принципах радиолокации, решаются задачи, связанные с диагностикой организма человека. Как видите, спектр задач, решаемых радиолокацией, достаточно широк несмотря на то, что радиолокация сравнительно молодое научное направление.

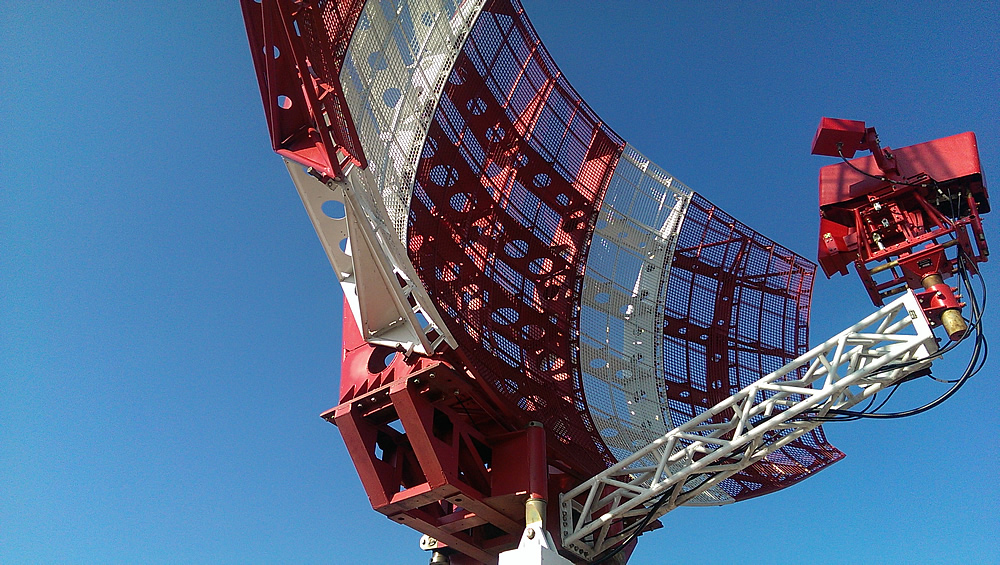
Самолет дальнего радиолокационного обнаружения и управления А-50У

Первые упоминания о возможности использования радиоволн для обнаружения различных объектов относятся ко второй половине 90-х годов XIX столетия. В частности, годом рождения радиолокации в России считается 1897-й, когда изобретатель радио Александр Степанович Попов, проводя свои эксперименты в открытом море по установлению связи с помощью беспроводного телеграфа, обнаружил эффект отражения радиоволн. Было это так. Летом 1897 года под руководством А.С. Попова в Финском заливе проводились испытания радиоаппаратуры, изобретенного им беспроволочного телеграфа. В испытаниях принимали участие два морских судна – транспорт «Европа» и крейсер «Азия». На данных судах были установлены приемная и передающая аппаратура, и между ними поддерживалась непрерывная радиосвязь.
Неожиданно между кораблями прошел линейный крейсер «Лейтенант Ильин». Связь между кораблями прервалась. Через некоторое время, когда «Лейтенант Ильин» прошел линию, соединяющую корабли, связь возобновилась. Это «затенение» было замечено испытателями, и в отчете А.С. Попова по результатам экспериментов было отмечено, что появление каких-либо препятствий между передающей и приемной позициями может быть обнаружено как ночью, так и в тумане. Так родилась радиолокация.
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10 –8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
Доплеровский метеорологический радиолокатор

В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t0 и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t0) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t0) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Основные классы РЛС
Выполнение частной задачи радиолокационного наблюдения, например обнаружения цели или измерения дальности до нее, осуществляется с помощью одноименных радиолокационных устройств – радиолокационного обнаружителя или радиолокационного измерителя дальности соответственно. Совокупность радиолокационных устройств, предназначенных для решения какой-либо общей задачи, например обеспечения перехвата воздушной цели либо поражения наземной цели и т. п., называется радиолокационной системой (РЛС), или радиолокатором. Техническая реализация такой системы обычно именуется радиолокационной станцией, а в англоязычной литературе – радаром.
Источником информации о цели в радиолокации служит радиолокационный сигнал. В зависимости от способов формирования радиолокационного сигнала различают следующие типы РЛС, или методы радиолокации.
1. Активные РЛС, или активный метод радиолокационного наблюдения. При данном методе с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). В результате взаимодействия зондирующего сигнала с целью образуется отраженный сигнал, который поступает на вход приемника РЛС и затем обрабатывается в данном устройстве в целях извлечения информации о наблюдаемой цели. Данный метод радиолокационного наблюдения получил наибольшее распространение в современных РЛС. Необходимо заметить, что при использовании активного метода устройство формирования радиосигнала (передатчик) и приемник РЛС находятся в одной точке пространства.
2. Активные РЛС с активным ответом. Как и в предыдущем случае, с помощью РЛС формируется радиосигнал, который излучается в направлении на цель (зондирующий сигнал). Однако радиолокационный сигнал формируется не в результате отражения излучаемых электромагнитных колебаний целью, а за счет переизлучения их с помощью специального устройства, именуемого ответчиком-ретранслятором. Данный метод широко используется в системах определения государственной принадлежности наблюдаемых объектов, управления воздушным движением, а также в радионавигационных системах.
3. Полуактивный метод радиолокации, или полуактивные РЛС. При использовании данного метода радиолокационный сигнал формируется, как при активном методе путем отражения зондирующих электромагнитных колебаний от цели. Но передающее устройство (передатчик РЛС) и устройство, принимающее отраженные сигналы (приемник РЛС), разнесены в пространстве. Данный метод, например, широко используется при наведении управляемых ракет класса «воздух – воздух» на поражаемые воздушные цели.
4. Пассивная радиолокация, или пассивный метод радиолокационного наблюдения, основан на приеме собственного радиоизлучения целей. Отличительной особенностью таких систем является наличие в их составе только приемного устройства. Отсутствие необходимости формирования зондирующего колебания делает такие системы высокопомехозащищенными. Данные РЛС широко применяются при пеленгации радиоизлучающих систем противника, например РЛС, входящих в систему управления ПВО противоборствующей стороны.
Таким образом, радиолокационные системы могут быть активными, полуактивными, активными с активным ответом и пассивными. Кроме того, все существующие РЛС можно разделить на следующие основные группы.
В первую группу входят РЛС класса «воздух – воздух», основной задачей которых является обнаружение, измерение координат и параметров движения воздушных целей. К данным РЛС относятся, например, радиолокационные станции перехвата и прицеливания, устанавливаемые на самолетах-истребителях, либо авиационные РЛС дальнего радиолокационного обнаружения воздушных целей.
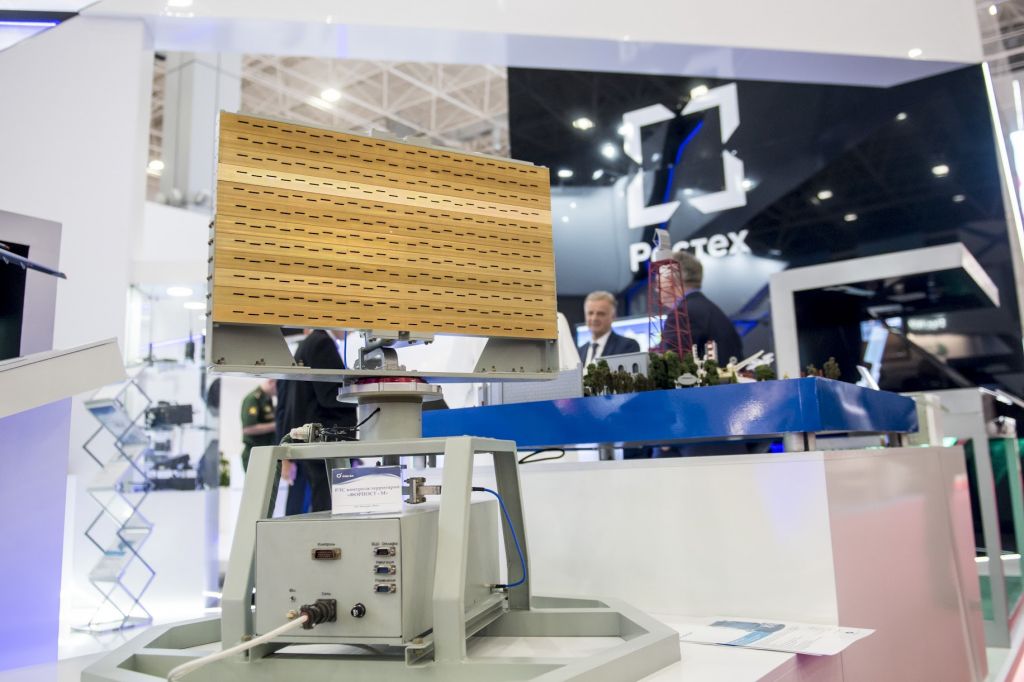
Радиолокационная станция контроля территорий «Форпост-М»
Вторую группу составляют РЛС класса «воздух – поверхность». Данные РЛС служат для получения радиолокационного изображения земной поверхности либо информации о координатах и параметрах движения наземных целей. К данным системам относятся, например, РЛС обзора Земли, которые обеспечивают получение радиолокационного изображения поверхности Земли и информации о координатах и параметрах движения наземных целей. В эту группу входят также и РЛС, обеспечивающие радиолокационную разведку наземных объектов и наблюдение малоразмерных наземных целей.
В третью группу входят РЛС класса «поверхность – воздух», основной задачей которых, как и радиолокаторов первой группы, является обнаружение, измерение координат и параметров движения воздушных целей. Однако местом установки таких систем являются либо поверхность Земли, либо объекты наземной и морской техники (подвижные или стационарные). Типичным представителем таких систем являются РЛС обнаружения, входящие в системы управления воздушным движением или противовоздушной обороны страны, а также РЛС, призванные для наблюдения за метеорологической обстановкой.
Четвертую группу составляют РЛС класса «поверхность – поверхность», основной задачей которых является обнаружение, измерение координат и параметров движения наземных целей либо воздушных объектов при перемещении последних по поверхности Земли. Типичным представителем таких систем являются, например, РЛС обзора летного поля, которые входят в системы управления движением самолетов при рулении их по летному полю.
Из приведенных примеров РЛС заявленных классов следует, что на первом месте в названии класса стоит слово, обозначающее место установки радиолокатора, а на втором – слово, определяющее объект, по которому работает РЛС. В частности, например, если речь идет о классе РЛС «поверхность – воздух», то это значит, что РЛС находится на земной поверхности, а объектами ее наблюдения являются воздушные цели.
Кроме отмеченных, существует еще одна группа РЛС, которые строятся по многофункциональному принципу и объединяют в себе решение задач, например, возлагаемых как на радиолокационные системы класса «воздух – воздух», так и на системы класса «воздух – поверхность». Другими словами, данные РЛС объединяют в себе функции радиолокаторов различных классов. Такими, например, являются бортовые РЛС, устанавливаемые на современные истребители.
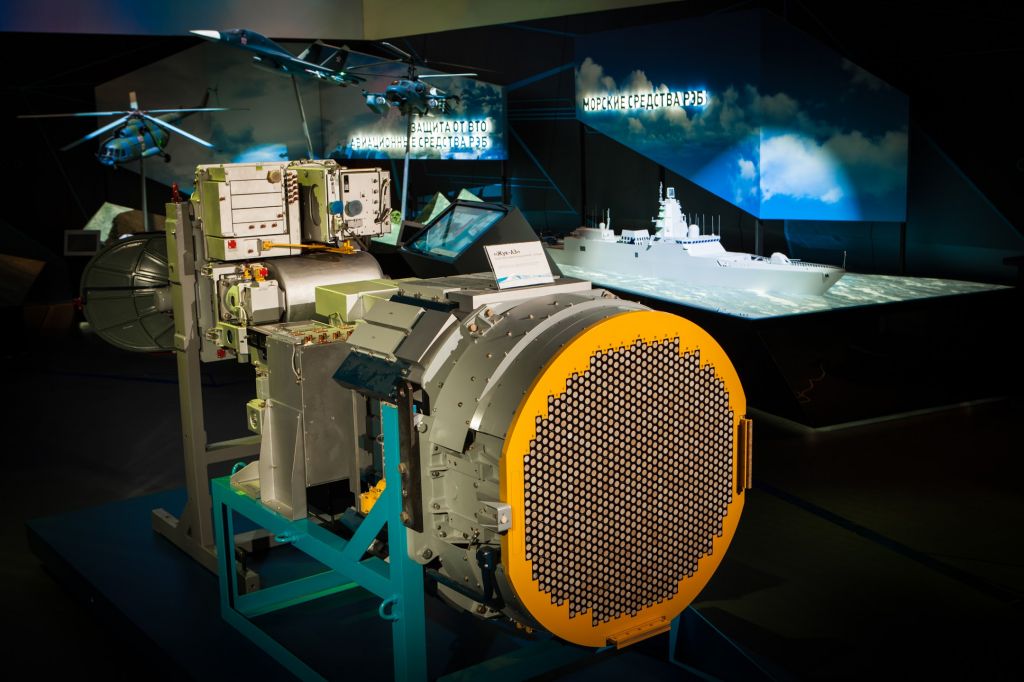
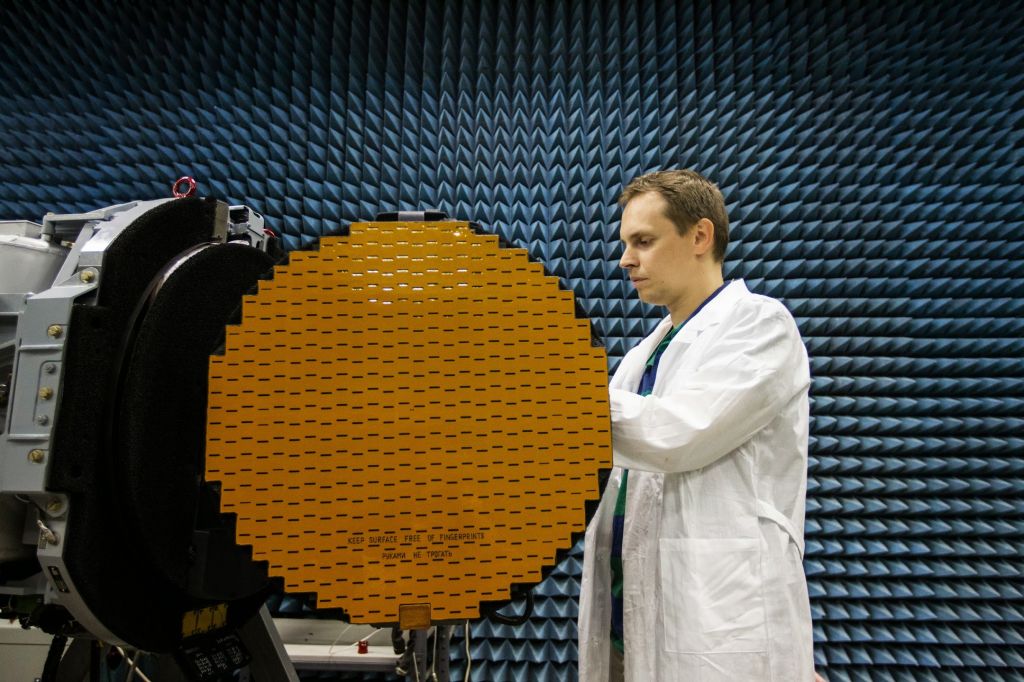
РЛС «Жук-АЭ» для истребителя МиГ-35
В то же время необходимо отметить, что, несмотря на проведенное выше разделение РЛС на классы, существуют специальные РЛС, которые строятся под решение специфических задач и под данное разделение на классы не подпадают. Например, РЛС, решающие задачи диагностики состояния организма человека либо наблюдения объектов, скрытых за преградами, либо наблюдения космических объектов и т.п. Но в целом приведенная классификация позволяет разделить все существующие РЛС по функциональному предназначению.
Таким образом, радиолокационные системы делятся на пять больших классов: РЛС класса «воздух – воздух», РЛС класса «воздух – поверхность», РЛС класса «поверхность – воздух», РЛС класса «поверхность – поверхность» и многофункциональные РЛС.
Как «искусственный интеллект» ищет цель
Состав элементов радиолокационной системы, конечно же, зависит от назначения системы и задач, решение которых возлагается на нее. Тем не менее можно рассмотреть некоторую обобщенную структуру РЛС и рассказать о предназначении элементов такого радиолокатора.
Представим структурную схему гипотетической РЛС, в основу работы которой положен активный метод радиолокации при импульсном режиме излучения, то есть с использованием импульсных зондирующих сигналов в виде чередующихся во времени отрезков колебаний.
На данной структурной схеме можно представить шесть основных элементов типовой РЛС, которые будут иметь место вне зависимости от принципов ее построения, – передатчик (ПРД), приемник (ПРМ), антенная система (АНТ), антенный переключатель (АП), система управления и синхронизации, система обработки.
Передатчик, или передающий тракт РЛС, обеспечивает формирование зондирующего радиосигнала, усиление его до требуемого уровня мощности и передачу в антенную систему. Антенна в импульсном радиолокаторе работает как на передачу, так и на прием. Переключение антенны из режима излучения в режим приема обеспечивается с помощью антенного переключателя, который управляется сигналами системы управления и синхронизации.
Приемник РЛС обеспечивает предварительное преобразование принятого сигнала. Во-первых, осуществляет доведение уровня принятого сигнала до необходимого значения для успешной работы последующих узлов радиолокатора. Во-вторых, осуществляет преобразование (чаще уменьшение) несущей частоты принимаемого сигнала для снижения требований к элементам системы обработки. В-третьих, обеспечивает предварительную селекцию полезного сигнала (сигнала, отраженного от цели) из сигналов помех, которые действуют одновременно с полезным сигналом.
После предварительного преобразования в приемнике сигнал поступает в систему обработки, в которой решаются задачи по выделению из принятого сигнала информации о цели. Система обработки в современных РЛС представляет собой цифровую вычислительную систему, подобную обычному компьютеру или совокупности компьютеров. Поэтому данный элемент РЛС часто еще называют цифровой системой обработки.
Необходимо заметить, совокупность алгоритмов, закладываемых в систему обработки, определяет возможности РЛС и качество решения задач радиолокационного приема радиолокатором. Часто говорят, что система обработки определяет «интеллект» РЛС. Хотя термин «интеллект», конечно же, применим только к человеку. Однако современные технологии позволяют создавать технические системы, например, роботы, обладающие искусственным интеллектом. Современный уровень разработки алгоритмов в РЛС таков, что термин «искусственный интеллект» вполне применим и к современным радиолокаторам.
Подробнее о радиолокационных системах, их применении и перспективах читайте в книге «Радиолокация для всех» (В.С. Верба, К.Ю. Гаврилов, А.Р. Ильчук, Б.Г. Татарский, А.А. Филатов / под редакцией члена-корреспондента РАН В.С. Вербы).
Радиолокационная съемка
Основные преимущества радиолокационной космической съёмки в том, что получать радиолокационные снимки можно вне зависимости от погоды и времени суток: микроволновое излучение свободно проходит сквозь облака и не требует наличия дневного света, как снимки в видимом и ИК-диапазонах.
Задачи радиолокационной съемки
Изначально задачи радиолокационной съёмки ограничивались исследованиями поверхности океана. Сейчас же круг задач радиолокационной съёмки расширился, и радиолокационная съёмка позволяет получать данные о миллиметровых смещениях объектов на земной поверхности, отслеживать нефтяные загрязнения и судовую обстановку в акваториях, а также создавать цифровые модели местности (широко известная ЦММ SRTM создана на основе обработки данных радиолокации).
Обработка РЛС
Стоит отметить, что обработка РЛС достаточно тяжелая задача, потому что радиолокационный снимок имеет непривычное для человеческого глаза изображение в сыром виде. Для обработки РЛС используются специализированные программные продукты, и специалисты должны иметь должный опыт создания вторичных продуктов радиолокационной космической съёмки. Однако, не смотря на это, преимущества РЛС делают использование радиолокационной съёмки очень востребованным.
Можно выделить три степени обработки данных радиолокации:
Использование радиолокационной съемки
Задачи радиолокационной съемки расширяются с каждым годом. Инновационная обработка РЛС позволяет открывать все более новые направления использования радиолокационной съемки:
Что такое радиолокационное изображение
Что такое радиолокационная съёмка?
Длина и частота радиоволн при съёмке земной поверхности
Авиационная и космическая радиолокационная съёмка осуществляется в миллиметровом, сантиметровом и дециметровом диапазонах длин волн (λ). Наряду с длиной волны используют понятие частоты (ν). Обе эти величины пропорциональны скорости света в вакууме: c=λν. Для обозначения диапазонов съёмки применяют специальные латинские буквосочетания.

Проникающая способность радиоволн
 |
| Поляризация радиоволн |
Поляризация электромагнитной волны определяется ориентацией вектора напряженности электрического поля в плоскости, перпендикулярной направлению распространения волны. Сигнал, посылаемый и принимаемый антенной радиолокатора, поляризован: электрический вектор колеблется, как правило, в одном из двух направлений: горизонтальном H или вертикальном V (иногда при излучении используют круговую поляризацию). Различают поляризацию согласованную, при которой посылаемый и принимаемый сигнал поляризованы одинаково (HH, VV), и перекрёстную (или кросс-поляризацию), при которой направления поляризации в посылаемом и принимаемом сигналах взаимно перпендикулярны (HV, VH). Поляризация волны может изменяться по-разному в результате взаимодействия с различными объектами местности, что позволяет выявлять их новые свойства.
Геометрия радиолокационной съёмки
Пространственное разрешение радиолокационных изображений определяется свойствами антенны и различается в направлении действия антенны (дальности) и в направлении движения спутника (азимута).
 |
| Радиолокатор с синтезированной апертурой |
Наиболее высокое пространственное разрешение обеспечивают радиолокаторы с синтезированной апертурой (РСА). Принцип их работы основан на регистрации и последующей когерентной обработке сигналов, принятых от объекта местности A в процессе движения носителя на участке орбиты, называемом интервалом синтезирования (Lsynt). В общем случае разрешение РСА по азимуту вычисляется по следующей формуле: ρa=Srdλ/2Lsynt.
В настоящее время вся радиолокационная съёмка Земли из космоса осуществляется радиолокаторами с синтезированной апертурой.
Режимы обзора космических РСА
1  2
2  3
3 
Варианты проведения интерферометрических съёмок
В последнее время в целом наблюдается тенденция к увеличению количества съёмочных режимов, в которых ведётся работа космических радиолокаторов. Так, системой Radarsat-1 осуществлялась съёмка в 7, а Radarsat-2 – уже в 17 режимах, характеризующихся комбинацией следующих параметров: пространственное разрешение, ширина полосы захвата, диапазон углов съёмки и набор поляризационных каналов.
Изображения, формируемые по данным метеорадаров

Рисунок 1. Радиолокационное изображение РЕ отс службы DWD: локальное изображение типа «Echo top», отображаются только точки, значение коэффициента отражения в которых выше заданного значения (здесь 18 дБZ), цвета соответствуют высоте слоя с измеренным значением,
(© 2020 Deutscher Wetterdienst)

Рисунок 1. Радиолокационное изображение РЕ отс службы DWD: локальное изображение типа «Echo top», отображаются только точки, значение коэффициента отражения в которых выше заданного значения (здесь 18 дБZ), цвета соответствуют высоте слоя с измеренным значением,
(© 2020 Deutscher Wetterdienst)
Изображения, формируемые по данным метеорадаров
На основе данных, получаемых при помощи метеорологических радиолокаторов, генерируются различные радиолокационные изображения метеообстановки: локальные или объединенные. Если радиолокационные данные комбинируются при помощи математических алгоритмов, то говорят об объединенном изображении. Это может быть как локальное объединение (когда данные, полученные за несколько оборотов антенны, накладываются друг на друга), так и объединение данных от разных радиолокаторов и радиолокационных позиций. Например, изображения радиолокаторов обнаружения осадков (так называемых «дождевых» радиолокаторов), распространяемые в сети Интернет, всегда объединенные (составные).
Локальные радиолокационные изображения
Первичные данные, получаемые радиолокационным методом, (или его базовые данные) — это только отражательная способность (значение коэффициента отражения) и, возможно, радиальные скорости. В зависимости от используемого метода сканирования данные отображаются либо на индикаторе типа ИКО (с вращением антенны по азимуту), либо на индикаторе «дальность-высота» (с качанием антенны по углу места). Базовые данные, измеряемые радиолокатором, — отражательная способность и скорость — могут отображаться на индикаторах обоих типов. На основе этих данных создаются различные радиолокационные изображения с использованием различного количества классов (количество уровней интенсивности, отображаемых цветами и их оттенками), с разным разрешением по дальности и по углам, для разной максимальной дальности и разных первичных данных (сканирование объема или сканирование осадков), а также различных программных алгоритмов сжатия.

Рисунок 2. Индикатор «Дальность — Высота»

Рисунок 2. Индикатор «Дальность — Высота»
На индикаторах кругового обзора метеобразования представляются на плоскости (подобно карте), при этом центр соответствует местоположению метеорадара. Положение эхо-сигналов определяется направлением и дальностью, то есть задается в полярной системе координат относительно точки стояния радиолокатора. Цветовая шкала используется для отображения интенсивности эхо-сигналов. Каждый оборот антенны выполняется с разным углом места луча. Изначально на индикаторе отображается только результат сканирования при одном угле места, который записан в течение одного оборота антенны. Цвета изображения соответствуют отраженной мощности, принятой антенной радиолокатора от определенной точки пространства. Следовательно, одиночное изображение на ИКО не может дать полной картины вертикальной структуры области осадков. Оно показывает только коническое сечение метеообразования.
На индикаторе «дальность-высота» (Рисунок 2) отображаются данные только для одного углового (азимутального) положения антенны. Антенна радиолокатора качается вверх и вниз по углу места. Полученное изображение позволяет исследовать вертикальную протяженность и распределение эхо-сигналов (например, для определения высоты нижней и верхней границ облачности, области осадков или грозовых облаков). В современных радиолокаторах антенне не нужно останавливаться и после этого поворачиваться на следующий азимут: изображение «дальность-высота» составляется из данных, полученных за несколько оборотов антенны.
Классическое изображение «дальность-высота» начинается в точке местонахождения радиолокатора и имеет вид сектора определенного углового размера, ограниченного максимальной дальностью действия. При этом пользователь может задавать начальную и конечную границы этого сектора. Следовательно, в данном случае построение вертикального сечения метеообразования является возможным.
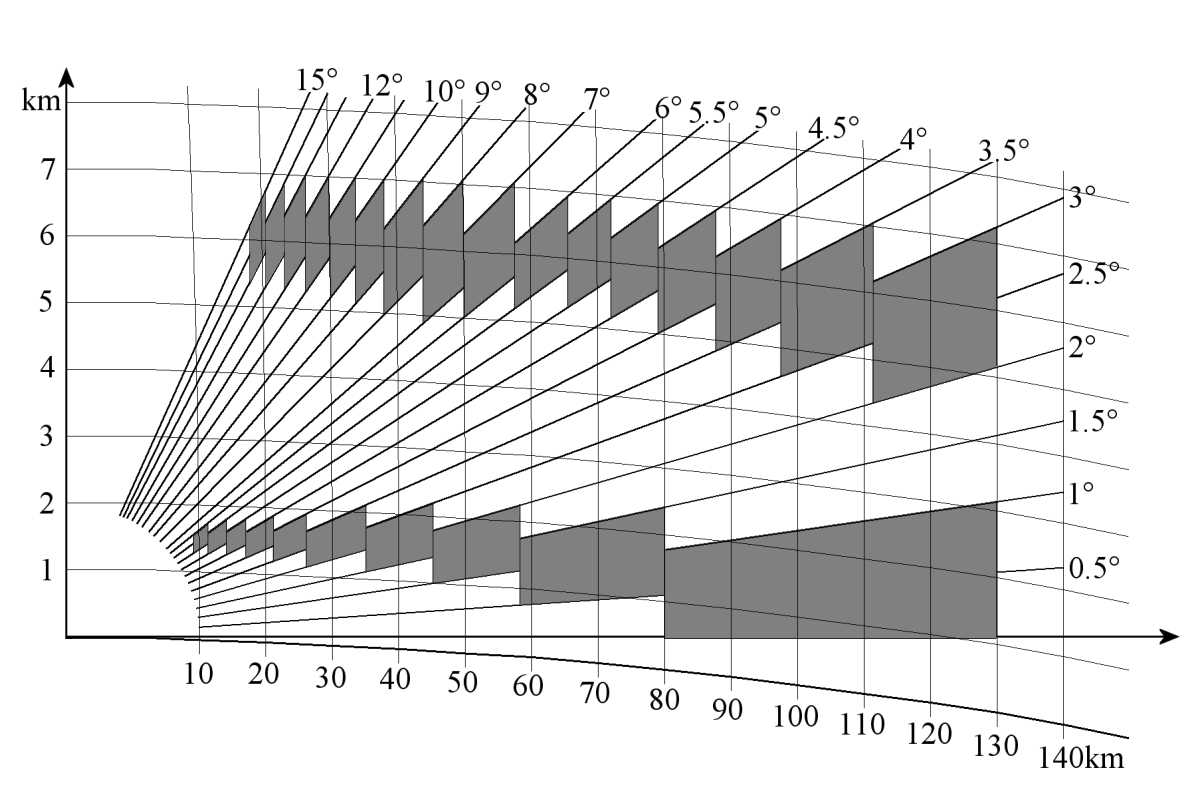
Рисунок 3. Объединение различных угломестных сканирований в одно CAPPI-изображение

Рисунок 3. Объединение различных угломестных сканирований в одно CAPPI-изображение
Локальное объединение данных
Комбинация данных, полученных погодным радиолокатором за несколько оборотов антенны, представляет собой локальное объединенное радиолокационное изображение. Оно состоит из разных последовательностей изображений, постороенных в результате сканирования под всеми углами места в пределах зоны действия радиолокатора в угломестной плоскости.
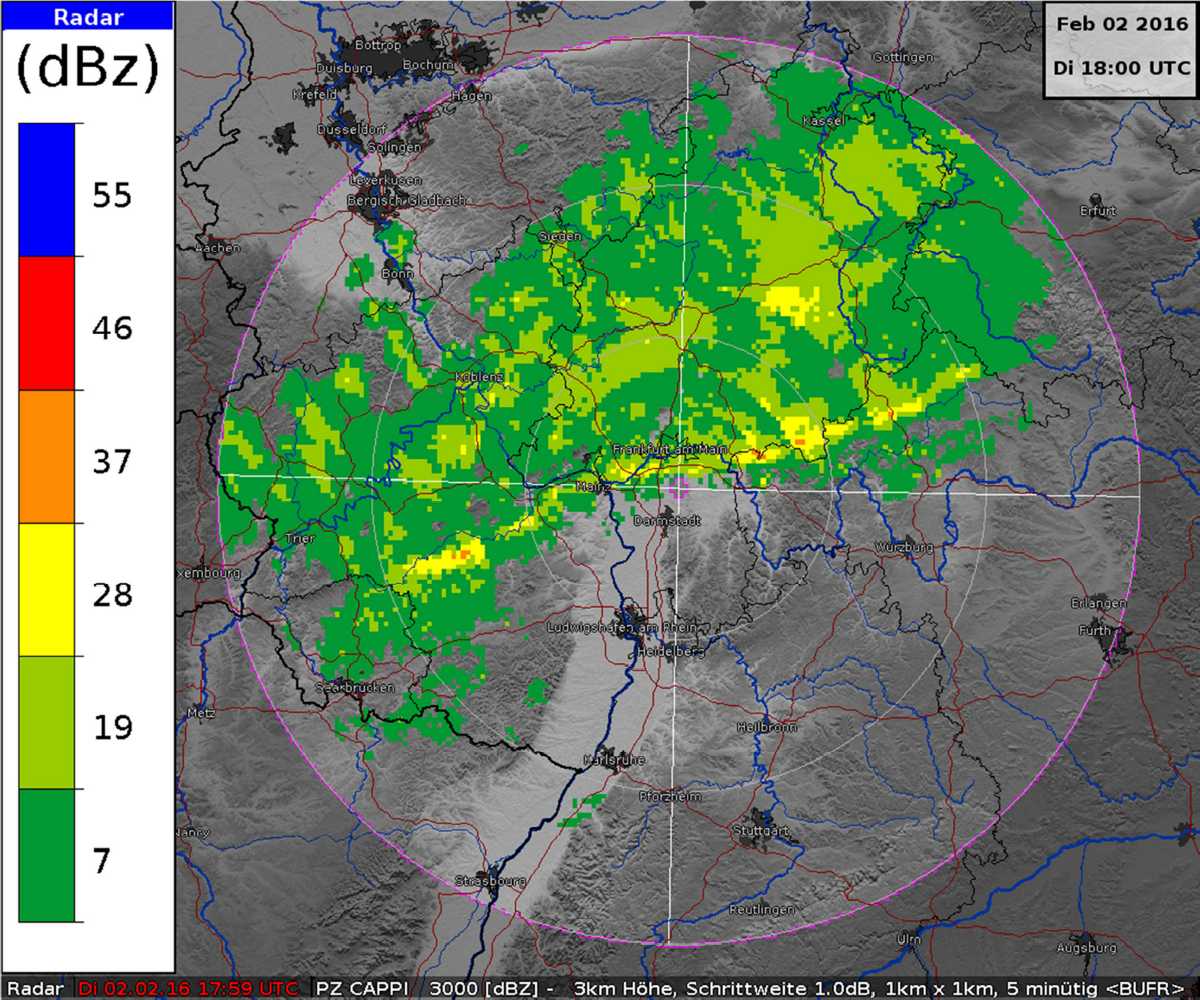
Рисунок 4. Радиолокационное изображение вида PZ от DWD: локальное CAPPI-изображение, показывающее метеообстановку на высоте 3 000 м (10 000 футов),
(© 2020 Deutscher Wetterdienst)

Рисунок 4. Радиолокационное изображение вида PZ от DWD: локальное CAPPI-изображение, показывающее метеообстановку на высоте 3 000 м (10 000 футов),
(© 2020 Deutscher Wetterdienst)
Объединенная отражательная способность
Объединенная отражательная способность получается в результате наложения всех данных сканирования объема. Отображается наиболее интенсивный эхо-сигнал из угломестных зондирований. Каждая точка радиолокационного изображения показывает максимальное значение (в дБZ) коэффициента отражения в воздушном «столбе» над этой точкой.
Эхо топ (Echo top)
Эхо топ — это вид радиолокационного изображения, который также формируется путем наложения данных, полученных при разных углах места. Цветовая гамма используется для отображения интенсивности отражения. Такое изображение дает возможность определить максимальную высоту, на которой сосредоточены осадки (что отличается от высоты облаков). Построенная таким образом карта особенно актуальна для обеспечения безопасности полетов авиации.
CAPPI
CAPPI (Constant Altitude PPI) — индикатор кругового обзора (ИКО) для постоянной высоты — горизонтальное двумерное представление результатов измерения радиолокатора для определенной высоты. Изображение САPPI формируется расчетным способом, в том числе, с использованием интерполяции данных, полученных для разных высот. На индикаторе данные для разных высот отображаются разными цветами. Так называемый псевдо-CAPPI отличается тем, что при его формировании используются также дополнительные значения, полученные в результате экстраполяции данных в дальней зоне.



