Что такое радиолокация в физике
Обнаружение и точное определение местонахождения объектов с помощью радиоволн называют радиолокацией.
Радиолокационная установка — радиолокатор (или радар) — состоит из передающей и приемной частей.
В радиолокации используют электрические колебания сверхвысокой частоты (108 — 1011 Гц).
Мощный генератор СВЧ связан с антенной, которая излучает остронаправленную волну.
В радиолокаторах, работающих на длинах волн порядка 10 см и меньше, такая волна создается антеннами в виде параболических зеркал.
Для волн метрового диапазона антенны имеют вид сложных систем вибраторов.
При этом острая направленность излучения получается вследствие сложения волн.
Антенна устроена так, что волны, посланные каждым из вибраторов, при сложении взаимно усиливают друг друга лишь в заданном направлении.
В остальных направлениях происходит полное или частичное их взаимное гашение.
Отраженная волна улавливается либо той же излучающей антенной, либо другой приемной антенной, тоже остронаправленной.
Строгая направленность излучения позволяет говорить о луче радиолокатора.
Направление на объект и определяется как направление луча в момент приема отраженного сигнала.
Для определения расстояния до цели применяют импульсный режим излучения.
Передатчик излучает волны кратковременными импульсами.
Длительность каждого импульса составляет миллионные доли секунды, а промежуток между импульсами примерно в 1000 раз больше.
Во время пауз принимаются отраженные волны.
Определение расстояния R проводится путем измерения общего времени t прохождения радиоволн до цели и обратно.
Так как скорость радиоволн с = 3 • 108 м/с в атмосфере практически постоянна на всем пути луча, то

Вследствие рассеяния радиоволн до приемника доходит лишь ничтожная часть той энергии, которую излучает передатчик.
Потому приемники радиолокаторов усиливают принятый сигнал в миллионы миллионов раз (10 12 ).
Такой чувствительный приемник, разумеется, должен быть отключен на время посылки импульса передатчиком.

Для фиксации посланного и отраженного сигналов используют электронно-лучевую трубку.
В момент посылки импульса светлая точка, равномерно движущаяся по экрану электронно-лучевой трубки, отклоняется.
На экране появляется всплеск около нулевой отметки шкалы дальности.
Светящееся пятнышко на экране продолжает равномерно двигаться вдоль шкалы и в момент приема слабого отраженного сигнала снова отклоняется.
Расстояние между всплесками на экране пропорционально времени t прохождения сигнала и, следовательно, расстоянию R до цели.
Это позволяет проградуировать шкалу непосредственно в километрах.
Радиолокационные установки обнаруживают корабли и самолеты на расстояниях до нескольких сот километров.
На их работу лишь незначительно влияют условия погоды и время суток.
В больших аэропортах локаторы следят за взлетающими и идущими на посадку самолетами.
Наземная служба передает по радио пилотам необходимые указания и таким образом обеспечивает безопасность полетов.
Корабли и самолеты также снабжены радиолокаторами, служащими для навигационных целей.
Такие локаторы создают на экране картину расположения объектов, рассеивающих радиоволны, и оператор видит радиолокационную карту местности.
В настоящее время применение радиолокации становится все более разнообразным.
С помощью локаторов наблюдают метеоры в верхних слоях атмосферы.
Локаторы используются службой погоды для наблюдения за обланами.
Локаторы используются в космических исследованиях.
Каждый космический корабль обязательно имеет на борту несколько радиолокаторов.
В 1946 г. в США и Венгрии был осуществлен эксперимент по приему сигнала, отраженного от поверхности Луны.
В 1961 г. учеными нашей страны произведена радиолокация планеты Венера, что позволило оценить период ее вращения вокруг своей оси.
В настоящее время осуществлена локация и других планет Солнечной системы.
Радиолокаторы используются для обнаружения самолетов и кораблей, в службе погоды, для локации планет и др.
Радиолокация
Содержание
Радиолока́ция — область науки и техники, объединяющая методы и средства обнаружения, измерения координат, а также определение свойств и характеристик различных объектов, основанных на использовании радиоволн. Близким и отчасти перекрывающимся термином является радионавигация, однако в радионавигации более активную роль играет объект, координаты которого измеряются, чаще всего это определение собственных координат. Основное техническое приспособление радиолокации — радиолокационная станция (англ. Radar).
Различают активную, полуактивную, активную с пассивным ответом и пассивную РЛ. Подразделяются по используемому диапазону радиоволн, по виду зондирующего сигнала, числу применяемых каналов, числу и виду измеряемых координат, месту установки РЛС.
Классификация
Выделяют два вида радиолокации:
Активная радиолокация бывает двух видов:

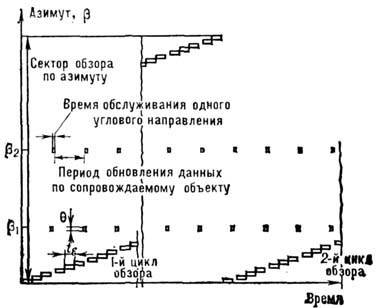
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
В соответствии с видом излучения РЛС делятся на
Принцип действия
Радиолокация основана на следующих физических явлениях:
Импульсный метод радиолокации
При импульсном методе радиолокации передатчики генерируют колебания в виде кратковременных импульсов, за которыми следуют сравнительно длительные паузы. Причём длительность паузы выбирается исходя из дальности действия РЛС Dmax.
 <2 D_
<2 D_
Сущность метода состоит в следующем:
Передающее устройство РЛС излучает энергию не непрерывно, а кратковременно, строго периодически повторяющимися импульсами, в паузах между которыми происходит приём отражённых импульсов приёмным устройством той же РЛС. Таким образом, импульсная работа РЛС даёт возможность разделить во времени мощный зондирующий импульс, излучаемый передатчиком и значительно менее мощный эхо-сигнал. Измерение дальности до цели сводится к измерению отрезка времени между моментом излучения импульса и моментом приёма, то есть временем движения импульса до цели и обратно.
Дальность действия РЛС
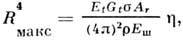
Максимальная дальность действия РЛС зависит от ряда параметров и характеристик как антенной системы станции, так и генератора, и приёмника системы. В общем случае без учёта потерь мощности в атмосфере, помех и шумов дальность действия системы можно определить следующим образом:
 ,
,
 — мощность генератора;
— мощность генератора;  — коэффициент направленного действия антенны;
— коэффициент направленного действия антенны;  — эффективная площадь антенны
— эффективная площадь антенны  — эффективная площадь рассеяния цели
— эффективная площадь рассеяния цели  — минимальная чувствительность приёмника.
— минимальная чувствительность приёмника.
При наличии шумов и помех дальность действия РЛС уменьшается.
Влияние помех

Влияние шумов
Влияние атмосферы
Атмосферные потери особенно велики в сантиметровом и миллиметровом диапазонах и вызываются дождем, снегом и туманом, а в миллиметровом диапазоне также кислородом и парами воды. Наличие атмосферы приводит к искривлению траектории распространения радиоволн (явление рефракции). Характер рефракции зависит от изменения коэффициента преломления атмосферы при изменении высоты. Из-за этого траектория распространения радиоволн искривляется в сторону поверхности земли.
РЛС непрерывного излучения
Используются в основном для определения радиальной скорости движущегося объекта (использует эффект Допплера). Достоинством РЛС такого типа является дешевизна и простота использования, однако в таких РЛС сильно затруднено измерение расстояния до объекта.
Пример: простейший радар для определения скорости автомобиля.
Основные идеи и этапы развития
Как известно, эффект отражения радиоволн открыл А.С. Попов в 1897 году. Но технически использовать удивительный эффект для «дальнего видения» никому не удавалось: волны рассеивались, и на объект локации их попадало меньше одной миллиардной части. Практические работы в области радиолокации начались в 30-х годах. Работы велись практически параллельно в СССР, Германии, Англии и Франции. Естественно, что разработки держались в секрете. Основной целью было обнаружение атак авиации.
В Советском Союзе осознание необходимости средств обнаружения авиации, свободных от недостатков звукового и оптического наблюдения, привела к разворачиванию исследований в области радиолокации. Идея, предложенная молодым артиллеристом Павлом Ощепковым получила одобрение высшего командования: наркома обороны СССР К. Е. Ворошилова и его заместителя — М. Н. Тухачевского.
В 1946 году американские специалисты — Реймонд и Хачертон, бывший сотрудник посольства США в Москве, написали: «Советские учёные успешно разработали теорию радара за несколько лет до того, как радар был изобретён в Англии». [4]
Основным фактором, ограничивающим технические характеристики локаторов, является малая мощность принимаемого сигнала. При этом мощность принимаемого сигнала убывает как четвёртая степень дальности, то есть, чтобы увеличить дальность действия локатора в 10 раз нужно увеличить мощность передатчика в 10000 раз! Естественно на этом пути быстро пришли к пределам, преодолеть которые было далеко не просто. Уже в самом начале развития был осознан тот факт, что имеет значение не сама мощность принимаемого сигнала, а его заметность на фоне шумов приемника. Снижение шумов приемника также было ограничено естественными шумами элементов приемника, например тепловыми. Данный тупик был преодолен на пути усложнения методов обработки принятого сигнала и связанного с этим усложнения формы применяемых сигналов. Развитие радиолокации как научной отрасли знаний шло одновременно с развитием кибернетики и сейчас потребуются специальные исследования, чтобы решить, где именно были получены первые результаты. Следует отметить появление понятия сигнала, который позволил отвлечься от конкретных физических процессов в приемнике, таких как напряжение и ток, и позволил решать стоящие проблемы как математическую задачу о поиске наилучших функциональных преобразованиях функций времени.
Одной из первых работ в этой области была работа Котельникова В. А. об оптимальном приёме сигнала, то есть наилучшем в условии шумов методе обработки сигнала. В результате было доказано, что качество приёма зависит не от мощности сигнала, а от его энергии, то есть произведения мощности на время, таким образом, появилась доказанная возможность увеличения дальности действия за счёт увеличения длительности сигналов, в пределе до непрерывного излучения. Значительным шагом вперед стало отчетливое применение в технике методов статистической теории решений (критерий Неймана-Пирсона) и принятие того факта, что исправное устройство может работать с определённой долей вероятности. Для того, чтобы радиолокационный сигнал при большой длительности позволял измерять дальность и скорость с высокой точностью, потребовались сложные сигналы, в отличие от простых радиолокационных импульсов, изменяющие какие-либо характеристики в процессе генерации. Так. сигналы с линейной частотной модуляцией изменяют частоту колебаний в течение одного импульса, сигналы с фазовой манипуляцией скачкообразно изменяют фазу сигнала, обычно на 180 градусов. При создании сложных сигналов было сформулировано понятие функции неопределённости сигнала, показывающей связь точности измерений дальности и скорости. Необходимость повышения точности измерения параметров стимулировало развитие различных методов фильтрации результатов измерений, например, методов оптимальной нелинейной фильтрации, которые явились обобщением фильтра Калмана на нелинейные задачи. В итоге всех этих разработок теоретическая радиолокация оформилась как самостоятельная сильно математизированная отрасль знаний, в которой значительную роль имеют формализованные методы синтеза, то есть проектирование ведется в известной мере «на кончике пера».
Основными моментами в противостоянии с авиацией были:
РАДИОЛОКАЦИЯ
— обнаружение и определение местоположения разл. объектов с помощью радиотехн. устройств. Первые радиолокац. станции (РЛС), называемые также радиолокаторами или радарами, появились в Великобритании, СССР и США в кон. 1930-х гг.

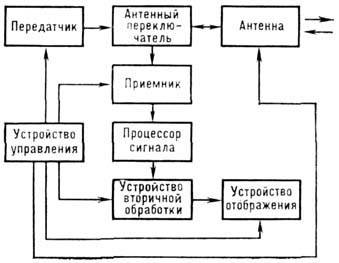
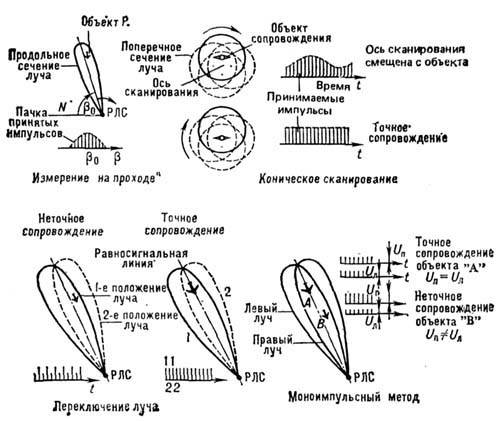
Основные методы радиолокации. Наибольшее распространение получила активная импульсная Р. Вследствие того, что излучение зондирующего импульса заканчивается раньше прихода отражённого сигнала, для передачи и приёма в импульсных РЛС служит одна и та же антенна. Укрупнённая блок-схема РЛС изображена на рис. 1. Широкое применение в передающих устройствах РЛС нашли магнетроны, однако в большинстве современных РЛС передатчик построен по схеме усилителя электрических колебаний (с выходным каскадом на клистроне или лампе бегущей волны )и имеет задающий ВЧ-генератор, служащий также источником гетеродинного напряжения приёмника (см. также Радиоприёмные устройства), а процессор сигнала представляет собой цифровое устройство, на к-рое принятые сигналы поступают после аналогово-цифрового преобразователя. Устройство отображения выполняется обычно на приёмных электронно-лучевых трубках и даёт наглядную координатную и дополнит. информацию о наблюдаемых объектах, контролируемых зонах пространства и имеющихся помехах (напр., гидрометеорах). Направление на объект Р. в РЛС с механически управляемой антенной определяют по угловому её положению, при к-ром величина принимаемого сигнала достигает максимума; в РЛС с электронно управляемым лучом вместо угл. положения антенны измеряют угл. положение луча относительно нормали к раскрыву антенны.
Требуемая энергия зондирования может быть сосредоточена в одном импульсе или в группе из n когерентных импульсов (т. е. импульсных «вырезок» из единого синусоидального колебания; при этом напряжение сигнала на выходе возрастает в n раз в сравнении с одним импульсом). Возможно также увеличить энергию сигнала за счёт некогерентного интегрирования импульсов на видеочастоте; в этом случае не потребуется поддержания определённых фазовых соотношений между импульсами на высокой и промежуточной частотах, но напряжение на интеграторе будет возрастать только как  В теории Р. доказывается, что существует. оптимальный приём, при к-ром достигается наибольшее возможное при данной энергетике превышение сигнала над шумом на выходе «согласованного фильтра» ( фильтра электрического, импульсная характеристика к-рого является «зеркальным отражением» на оси времени). Когерентный приём позволяет приблизить энергетику РЛС к теоретич. пределу.
В теории Р. доказывается, что существует. оптимальный приём, при к-ром достигается наибольшее возможное при данной энергетике превышение сигнала над шумом на выходе «согласованного фильтра» ( фильтра электрического, импульсная характеристика к-рого является «зеркальным отражением» на оси времени). Когерентный приём позволяет приблизить энергетику РЛС к теоретич. пределу.
Основные параметры РЛС. Разрешающая способность и точность определения координат являются кор-релиров. характеристиками РЛС. Разрешающая способность по угл. координате приближённо равна ширине q антенного луча, а среднеквадратичное значение случайной шумовой ошибки сопровождения


Для увеличения дальности действия РЛС необходимо повышать энергию зондирования, что достигается либо увеличением мощности в импульсе, либо увеличением его длительности. Второй путь предпочтительнее, т. к. устраняет ряд инженерных проблем, связанных с более высокими электрич. напряжениями. Но для сохранения при более длит. импульсах заданного разрешения по дальности требуется внутриимпульсная частотная модуляция (ЧМ) или фазо-кодовая модуляция (ФКМ), обеспечивающая ширину спектра Df с зондирующих сигналов, равную с/2DR, где с— скорость света. От длительности зондирующего импульса разрешение не зависит, но при обоих видах модуляции от неё зависит уровень мешающих боковых лепестков и ширина области их существования.
В случае внутриимпульсной линейной ЧМ принимаемый отражённый сигнал после преобразования на промежуточную частоту (см. Преобразование частоты )поступает на частотно-дисперсионную линию задержки (рис. 4, а), на выходе к-рой появляется сжатый импульс длительности 1/Df с. При внутриимпульсной ФКМ принимаемый отражённый сигнал после преобразования на промежуточную частоту поступает на линию задержки с отводами (рис. 4, б), отображающими кодовую последовательность ФКМ зондирующего импульса и снабжённую такими фазосдвигающими элементами в отводах, к-рые обеспечивают синфазное суммирование всех парциальных сигналов при достижении импульсом конца линии задержки; при этом на сумматоре появляется сжатый импульс длительностью 1/Df с.
В наземных и корабельных РЛС используются гл. обр. дециметровые и сантиметровые волны. В самолётных РЛС, где габариты антенн строго ограничены, применяются только короткие сантиметровые волны. Имеются также РЛС на волнах 8 мм и даже 3 мм. Ограничение длины волны снизу определяется резко возрастающими с уменьшением l потерями в атмосфере.
Кроме активных радиолокаторов, работающих по отражённому сигналу, существуют пассивные радиолокаторы, использующие естеств. излучение объектов (радиометры). Такие устройства могут непосредственно измерять только угл. координаты.
Лит.: Современная радиолокация, пер. с англ., М., 1969; Справочник по радиолокации, под ред. М. Сколника, пер, с англ., т. 1-4, М., 1976-79; Кук Ч., Бернфельд М., Радиолокационные сигналы, пер. с англ., М., 1971; Теоретические основы радиолокации, под ред. Я. Д. Ширмана, М., 1970; Леонов А. И., Фомичев К. И., Моноимпульсная радиолокация, 2 изд., М., 1984. Т. Р. Брахман,
§ 5.15. Радиолокация
Радиолокация основана на явлении отражения радиоволн от различных объектов. Практически заметное отражение радиоволн от тех или иных объектов возможно липгь в том случае, когда линейные размеры этих объектов превышают длину электромагнитной волны. Поэтому радиолокационные станции работают исключительно в диапазоне СВЧ (10 8 —10 11 Гц). Кроме того, для поиска объектов в радиолокации применяют остро направленный пучок электромагнитных волн, что практически возможно тоже только с очень короткими волнами.
Для получения остро направленного излучения дециметровых и более коротких волн используют антенны в виде вогнутых (параболических) металлических зеркал, в фокусе которых расположен излучающий диполь. Для более длинных волн конструируют сложные антенны, состоящие из многих определенным образом расположенных вибраторов. При этом острая направленность излучения получается вследствие интерференции волн. Антенна устроена так, что волны, посланные каждым из вибраторов, при сложении взаимно усиливают друг друга лишь в заданном направлении. В остальных направлениях при сложении волн происходит полное или частичное их взаимное гашение.
Отраженная волна улавливается той же излучающей антенной. Ярко выраженная направленность излучения позволяет говорить о «луче» радиолокатора. Направление на объект и определяется как направление луча в момент приема отраженного сигнала.

Радиолокаторы представляют собой установки импульсного действия. Передатчик излучает волны кратковременными импульсами (рис. 5.40). Длительность каждого импульса τ составляет миллионные доли секунды, а промежуток между импульсами Т примерно в 1000 раз больше.

Принцип действия радиолокатора
Современная радиолокационная станция представляет собой очень сложное радиотехническое устройство. В самых общих чертах работу простейшей радиолокационной станции можно объяснить при помощи блок-схемы, изображенной на рисунке 5.41.

В момент отправления передатчиком импульса антенный переключатель переключает антенну на режим «передача». Одновременно с посылкой импульса подается кратковременный сигнал на вертикально отклоняющие пластины индикатора (электронно-лучевой трубки) и равномерно нарастающее пилообразное напряжение на горизонтально отклоняющие пластины этой трубки. Вследствие этого на экране появляется всплеск около нулевой отметки шкалы дальности (рис. 5.42). Электронный луч за промежуток времени между импульсами под воздействием пилообразного напряжения равномерно двюкется по экрану индикатора.

После отправления импульса антенный переключатель соединяет антенну с приемником. Отраженный от препятствия сигнал принимается антенной, многократно усиливается* и подается на вертикально отклоняющие пластины той же трубки. Получается вторичный вертикальный всплеск на определенном расстоянии от первого. Зная скорость движения электронного луча в трубке, можно определить время t прохождения радиоволн от антенны до цели и обратно. Так как скорость радиоволн с = 3 • 108 м/с в атмосфере практически постоянна, то расстояние по лучу от антенны до цели

Расстояние между всплесками на экране индикатора пропорционально времени t прохождения сигнала и, следовательно, пропорционально расстоянию R до цели. Это позволяет проградуировать шкалу непосредственно в километрах.
Для определения направления на искомый объект антенна делается подвижной и способной поворачиваться в любом направлении. Зная ориентацию антенны во время обнаружения цели, определяют координаты цели. Изменение с течением времени этих координат дает возможность определить скорость цели и рассчитать ее траекторию.
Применение радиолокации
В настоящее время радиолокация находит себе различные применения, и прежде всего, для нужд обороны страны: обнаружение ракет, самолетов и кораблей, орудийная наводка и др. Дальность действия современных радиолокаторов достигает нескольких сотен километров. На их работу мало влияют условия погоды и время суток.
Радиолокационные установки имеют очень важные мирные «профессии». В больших аэропортах локаторы следят за взлетающими и идущими на посадку самолетами. Наземная служба передает по радио пилотам необходимые указания и таким образом обеспечивает безопасность полетов. Корабли и самолеты также снабжены радиолокаторами, служащими для навигационных целей. Такие локаторы создают на экране картину расположения объектов, рассеивающих радиоволны. Оператор имеет перед глазами радиолокационную карту местности.
Радиолокация широко используется в астрономии и в исследовании космического пространства. С помощью локаторов наблюдают метеоры в верхних слоях атмосферы. Локаторы применяются службой погоды для наблюдения за облаками. Каждый космический корабль обязательно имеет на борту несколько радиолокаторов. В 1946 г. в США и Венгрии был осуществлен эксперимент по приему сигнала, отраженного от поверхности Луны. В 1961 г. отечественными учеными произведена радиолокация планеты Венера, что позволило оценить период вращения планеты вокруг своей оси, длительное время остававшийся неизвестным. Осуществлена радиолокация Марса, Меркурия и Юпитера (на расстоянии около 600 млн км).
* Вследствие рассеяния радиоволн до приемника доходит лишь ничтожная часть той энергии, которую излучает передатчик. Поэтому приемники радиолокаторов усиливают принятый сигнал в миллионы миллионов (1012) раз.



