NASA отправит на Марс аппарат Perseverance для производства кислорода
Вот уже несколько лет мир наблюдает за историей создания марсохода с необычным названием “Настойчивость” (англ. Perseverance). Дело в том, что аппарат должен дополнить данные, полученные ранее с помощью других марсоходов, но для этого Настойчивости предстоит преодолеть трудности, вызванные ограничениями научного оборудования, установленного на роверах Spirit, Opportunity и Curiosity. Однако эта миссия NASA отличается от предыдущих не только названием – наибольший интерес сегодня представляет надежно спрятанная внутри корпуса золотая коробка – “Мокси” – с помощью которой Настойчивость попытается преобразовать небольшое количество атмосферного углекислого газа Марса в чистый, пригодный для дыхания кислород. Согласитесь, это будет по-настоящему уникальная миссия. Настойчивость отправится на Красную планету 17 июля текущего года.
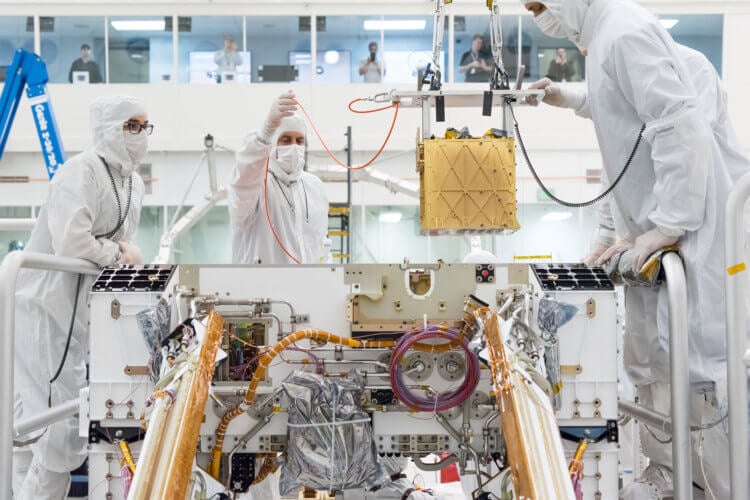
Установка “Мокси” на аппарат NASA “Настойчивость”
Ровер — космический аппарат, который способен передвигаться по поверхности других планет. На данный момент на Марсе находится ровер «Curiosity», который был посажен на поверхность планеты 6 августа 2012 года.
Есть ли жизнь на Марсе?
Дать имя новому марсоходу специалисты NASA попросили школьников всей страны. В результате, оценив 28 000 вариантов, инженеры выбрали название Настойчивость, которое предложил семиклассник по имени Александр Мэтер из Вирджинии. Запуск состоится летом текущего года. В общей сложности полет займет 8 месяцев – Настойчивость приземлится на Марс в феврале 2021 года. Как сообщается на официальном сайте американского национального агентства, как и все предыдущие исследовательские миссии, Настойчивость столкнется с трудностями и совершит множество удивительных открытий. Напомним, что недавно с помощью еще одного аппарата NASA Insight, ученые смогли доказать сейсмическую активность Красной планеты.
Чтобы всегда оставаться в курсе новостей из мира популярной науки и высоких технологий, подписывайтесь на наш новостной канал в Telegram
Запуск Настойчивости состоится на ракете Atlas V, о которой в своем материале рассказывал мой коллега Николай Хижняк. Марсоход будет оснащен новыми исследовательскими инструментами, включая бортовую лабораторию для отбора проб марсианских пород, 23 оптических датчика и камеру самого высокого разрешения. Более того, новый ровер усовершенствован автономным вертолетом на солнечной энергии, задача которого – поиск новых мест для исследований. Отметим, что ни один аппарат не взлетал в атмосфере другой планеты. С помощью встроенного мини-вертолета NASA хочет узнать, как будет вести себя летательный аппарат на Марсе и сможет ли летать вообще, так как атмосфера Красной планеты в 100 раз менее плотная, чем на Земле. Когда Настойчивость достигнет поверхности Марса, то должен приземлиться в марсианском кратере Езеро, в котором, по мнению специалистов NASA, возможно, в какой-то момент истории планеты, существовала жизнь. Сбор образцов, проведенный в этих краях, должен открыть сокровищницу информации, которая может помочь исследователям в их непрекращающихся поисках лучшего понимания того, был ли Марс когда-то обитаемой планетой или нет.
Запуск Настойчивости состоится на ракете Atlas V, о которой в своем материале рассказывал мой коллега Николай Хижняк.
Как Perseverance будет получать кислород?

Так выглядит сборка Настойчивости специалистами NASA
Несмотря на то, что все вышеперечисленные задачи Настойчивости несколько поражают воображение – даже знаменитый писатель-фантаст Рэй Брэдбери не предсказал нечто подобное в своих “Марсианских хрониках” – золотая коробка Мокси, созданная для преобразования атмосферного углекислого газа Красной планеты в пригодный для дыхания кислород, превзошла всех. Мокси устроено довольно сложно – устройству предстоит отделять атомы кислорода из существующих молекул углекислого газа, в результате чего образуется монооксид углерода, кислород и другие побочные продукты.
Еще больше увлекательных статей о том, как ученые всего мира изучают Красную планету, читайте на нашем канале в Google News
Атмосфера Марса состоит примерно на 95% из углекислого газа, поэтому его количества достаточно для того, чтобы превратить его в кислород. К сожалению, Мокси вырабатывает лишь небольшое количество кислорода – около шести граммов в час – а это ровно столько, чтобы сохранить жизнь маленькой собаке. Кроме того, Мокси не будет работать все время, так как Настойчивости требуется энергия для других не менее важных научных операций. В случае успеха, ученые смогут раз и навсегда доказать, что на Марсе можно производить достаточно кислорода для поддержания человеческой жизни. Думаем, эти данные будет невозможно недооценить – в конце-концов мы собираемся отправить людей на Красную планету и будет просто невероятно, если там можно будет дышать длительное время. Также, будет крайне интересно посмотреть, как работает Мокси и как его процессы повлияют на исследование Марса в будущем.


А ровер (или иногда планетоход) это поверхность планеты исследование устройство, предназначенное для перемещения по твердой поверхности на планета или другой планетная масса небесные тела. Некоторые марсоходы были разработаны как наземный транспорт для перевозки членов полет человека в космос экипаж; другие были частично или полностью автономные роботы. Роверы обычно создаются для посадки на другую планету (кроме Земля) через спускаемый аппарат-стиль космический корабль, [1] поручено собрать информацию о местности, и принять корка такие образцы, как пыль, почва, камни и даже жидкости. Это важные инструменты в исследование космического пространства.
Содержание
Сравнение с космическими зондами других типов

Роверы имеют ряд преимуществ перед стационарными. посадочные места: они исследуют больше территории, и их можно направить на интересные особенности. Если они питаются от солнечной энергии, они могут разместиться на солнечном месте, чтобы выдержать зимние месяцы. Они также могут улучшить знания о том, как выполнять очень удаленные робот управление транспортным средством, которое обязательно является полуавтономным из-за конечной скорости света.
Их преимущества перед орбитальный космический корабль что они могут делать наблюдения микроскопический уровень и может проводить физические экспериментирование. Недостатками марсоходов по сравнению с орбитальными аппаратами являются более высокая вероятность отказа из-за посадки и других рисков, а также то, что они ограничены небольшой площадью вокруг места посадки, что само по себе лишь приблизительно ожидается.
особенности
Марсоходы прибывают на космические корабли и используются в условиях, очень отличных от земных, что предъявляет определенные требования к их конструкции.
Надежность
Роверы должны выдерживать высокие ускорения, высокие и низкие температуры, давление, пыль, коррозия, космические лучи, оставаясь работоспособными без ремонта в течение необходимого периода времени.
Автономия
Марсоходы, которые приземляются на небесные тела, далекие от Земли, такие как Марсоходы, нельзя управлять дистанционно в реальном времени, так как скорость, с которой распространяются радиосигналы слишком медленно для в реальном времени или почти в реальном времени общение. Например, отправка сигнала с Марса на Землю занимает от 3 до 21 минуты. Таким образом, эти марсоходы могут работать автономно с небольшой помощью наземного управления до навигация и получение данных обеспокоены, хотя они по-прежнему требуют участия человека для определения перспективных целей на расстоянии, на которое нужно проехать, и определения того, как позиционировать себя для максимального использования солнечной энергии. [2] Предоставление марсоходу некоторых элементарных возможностей визуальной идентификации для проведения простых различий может позволить инженерам ускорить разведку. [2] Во время столетнего конкурса NASA Sample Return Robot Robot, марсоход по имени Катаглифис, успешно продемонстрировала возможности автономной навигации, принятия решений и обнаружения, извлечения и возврата образцов. [3]
Безколесные подходы
История

Луноход 0 (№ 201)
Советский вездеход задумывался как первый передвижной дистанционно управляемый робот на Луна, но разбился при неудачном пуске пусковой установки 19 февраля 1969 года.
Луноход 1
В Луноход 1 Марсоход совершил посадку на Луну в ноябре 1970 года. [5] Это был первый передвигающийся робот с дистанционным управлением, который приземлился на любое небесное тело. В Советский Союз запустил Луноход-1 с борта Луна 17 космический корабль 10 ноября 1970 г. и вышел на лунную орбиту 15 ноября. Корабль совершил мягкую посадку в Море дождей 17 ноября. У посадочного модуля были сдвоенные аппарели, с которых Луноход-1 мог спускаться на поверхность Луны, что он и сделал в 06:28 UT. С 17 ноября 1970 г. по 22 ноября 1970 г. марсоход проехал 197 м и за 10 сеансов связи вернул 14 снимков Луны крупным планом и 12 панорамных снимков. Он также проанализировал лунный грунт. Последний успешный сеанс связи с Луноходом-1 был 14 сентября 1971 года. Проработав 11 месяцев, [6] Луноход-1 удерживал рекорд прочности для космических вездеходов более 30 лет, пока не был установлен новый рекорд. Марсоходы.

Лунный вездеход Аполлон
НАСА включены Лунные вездеходы через три Аполлон миссии: Аполлон 15 (который приземлился на Луну 30 июля 1971 г.), Аполлон-16 (который приземлился 21 апреля 1972 г.), и Аполлон-17 (который приземлился 11 декабря 1972 года). [7]
Луноход 2

В Луноход 2 был вторым из двух беспилотный луноходы приземлились на Луна посредством Советский Союз как часть Программа Лунохода. Марсоход вступил в строй на Луна 16 января 1973 г. [8] Это был второй бродячий дистанционно управляемый робот приземлиться на любое небесное тело. В Советский Союз запустил Луноход-2 с борта Луна 21 космического корабля 8 января 1973 г., и он совершил мягкую посадку на восточной окраине Mare Serenitatis 15 января 1973 года. Луноход-2 спустился с двойных аппарелей спускаемого аппарата на поверхность Луны в 01:14 UT 16 января 1973 года. Луноход-2 проработал около четырех месяцев, пройдя 39 км (24 мили) местности, включая холмистую местность. возвышенность области и Rilles, и отправил обратно 86 панорамных изображений и более 80 000 телевизионных изображений. [9] [10] [11] Основываясь на вращении колес, Луноход-2 предположительно преодолел 37 км (23 мили), но российские ученые из Московского государственного университета геодезии и картографии (МИИГАиК) пересмотрели это расстояние до приблизительного 42,1–42,2 км (26,2–26,2 миль). ) на базе Lunar Reconnaissance Orbiter (МРО) изображения лунной поверхности. [12] [13] Последующие обсуждения с их американскими коллегами закончились согласованным окончательным расстоянием в 39 км (24 мили), которое с тех пор остается неизменным. [14] [15]

Проп-М
У советских спускаемых аппаратов «Марс-2» и «Марс-3» на борту был небольшой марсоход массой 4,5 кг, который мог бы перемещаться по поверхности на лыжи при этом соединен с посадочным модулем 15-метровым шлангокабелем. Два небольших металлических стержня использовались для автономного обхода препятствий, поскольку радиосигналам с Земли потребовалось бы слишком много времени, чтобы управлять марсоходами с помощью дистанционного управления. Марсоход планировалось вывести на поверхность после приземления с помощью манипулятора и перемещаться в поле зрения телекамер и останавливаться для измерения через каждые 1,5 метра. Следы марсохода в марсианской почве также должны были быть записаны для определения свойств материала. Из-за аварийной посадки Марса 2 и сбоя связи (15 секунд после посадки) Марса 3 ни один марсоход не был развернут.
Луноход 3
Советский марсоход должен был стать третьим передвижным роботом с дистанционным управлением на Луне в 1977 году. Миссия была отменена из-за отсутствия пусковой установки и финансирования, хотя марсоход был построен.
Марсоход
Марсоход был тяжелый Советский вездеход (гибрид, с обоим управлением дистанционное управление и автоматический), нацеленный на Марс, часть Марс 4НМ и планируется начать после 1973 г. (по планам 1970 г.). Он должен был быть запущен Ракета N1, который никогда не летал успешно. [16]

Соджорнер
Планетарный инструмент для обработки поверхностей Beagle 2
Бигль 2 был разработан для исследования Марса с помощью небольшого «крота» (Planetary Undersurface Tool, или PLUTO), который можно развернуть рукой. У PLUTO был сжатый пружинный механизм, позволяющий ему перемещаться по поверхности со скоростью 20 мм в секунду и зарываться в землю, собирая подземный образец в полости на его наконечнике. Beagle 2 потерпел неудачу при попытке приземлиться на Марс в 2003 году.
Марсоход для исследования Дух
Дух это робот-вездеход на Марсе, работал с 2004 по 2010 год. Это был один из двух марсоходов НАСАпродолжается Марсоход для исследования миссия. Он успешно приземлился на Марс в 04:35 Наземное UTC 4 января 2004 г., за три недели до своего близнеца, Возможность (MER-B), приземлился на другом конце планеты. Его название было выбрано Конкурс студенческих эссе, спонсируемый НАСА. Марсоход застрял в конце 2009 года, а его последнее сообщение с Землей было отправлено 22 марта 2010 года.
Юту Ровер из Chang’e 3
Чанъэ 3 это Китайский Лунная миссия это включает робот луноход Юту, названный в честь домашнего кролика Изменить, богиня Луны в китайской мифологии. Запущен в 2013 году с Чанъэ 3 миссия, это первый китайский луноход, первая мягкая посадка на Луну с 1976 года и первый марсоход, который работал там со времен Советского Союза. Луноход 2 прекратил свою деятельность 11 мая 1973 г. [18] Он был запущен на Луну 14 декабря 2013 года, и к концу второго лунного дня марсоход столкнулся с эксплуатационными трудностями. [19] после выживания и успешного восстановления в первую 14-дневную лунную ночь (около месяца на Луне), [20] и не мог двигаться после окончания второй лунной ночи, хотя продолжал собирать полезную информацию в течение нескольких месяцев после этого. [21] В октябре 2015 г. Юту установил рекорд по длительности эксплуатации марсохода на Луне. [22] 31 июля 2016 г. Юту перестал работать через 31 месяц, что значительно превышает его первоначальный ожидаемый срок службы в три месяца. [23]

Марсоход для исследования Возможность
Возможность это робот-вездеход на планете Марс, активен с 2004 по начало 2019 года. Запущен с Земля 7 июля 2003 г. он приземлился на Марсианин Meridiani Planum 25 января 2004 в 05:05 Наземное UTC (около 13:15 местное время), через три недели после своего близнеца Дух (MER-A) приземлился на другой стороне планеты. 28 июля 2014 года НАСА объявило, что Возможность, проехав более 40 км (25 миль) по планете Марс, установил новый рекорд «вне мира», когда марсоход проехал наибольшее расстояние, превзойдя предыдущий рекорд Советского Союза. Луноход-2 луноход который проехал 39 км (24 мили). [24] [25] (связанное изображение)
Активные миссии марсохода
Расположение активного ровера в контексте

Марсоход научной лаборатории Любопытство

26 ноября 2011 года НАСА Марсианская научная лаборатория миссия была успешно запущена на Марс. Миссия успешно приземлила робот Любопытство марсоход на поверхности Марса в августе 2012 года. В настоящее время марсоход помогает определить, мог ли Марс когда-либо поддерживать жизнь, и искать доказательства прошлого или настоящего жизнь на Марсе. [26] [27]
Запланированные миссии марсохода

Чандраяан 3
ЭкзоМарс Розалинд Франклин
Европейское космическое агентство (ESA) разработало и провело первые прототипы и испытания Розалинд Франклин вездеход. По состоянию на 2020 год [Обновить] Запуск марсохода запланирован на конец 2022 года. [28]
Миссия марсохода 2020

В Миссия марсохода 2020 это Марс вездеход разработан НАСА запущен в 2020 году. Он предназначен для расследования астробиологически соответствующая древняя среда на Марсе, исследуйте его поверхность геологические процессы и история, в том числе оценка его прошлого обитаемость и потенциал для сохранения биосигнатуры в пределах доступных геологических материалов. [29]
Чанъэ 5
Эта китайская миссия состоит из спускаемого аппарата и транспортного средства для возврата образцов. Его запуск запланирован на 2020 год. [30]
А ровер (или иногда планетоход) это поверхность планеты исследование устройство, предназначенное для перемещения по твердой поверхности на планета или другой планетная масса небесные тела. Некоторые марсоходы были разработаны как наземный транспорт для перевозки членов полет человека в космос экипаж; другие были частично или полностью автономные роботы. Роверы обычно создаются для посадки на другую планету (кроме Земля) через спускаемый аппарат-стиль космический корабль, [1] поручено собрать информацию о местности, и принять корка такие образцы, как пыль, почва, камни и даже жидкости. Это важные инструменты в исследование космического пространства.
Содержание
Сравнение с космическими зондами других типов
Роверы имеют ряд преимуществ перед стационарными. посадочные места: они исследуют больше территории, и их можно направить на интересные особенности. Если они питаются от солнечной энергии, они могут разместиться на солнечном месте, чтобы выдержать зимние месяцы. Они также могут улучшить знания о том, как выполнять очень удаленные робот управление транспортным средством, которое обязательно является полуавтономным из-за конечной скорости света.
Их преимущества перед орбитальный космический корабль что они могут делать наблюдения микроскопический уровень и может проводить физические экспериментирование. Недостатками марсоходов по сравнению с орбитальными аппаратами являются более высокая вероятность отказа из-за посадки и других рисков, а также то, что они ограничены небольшой площадью вокруг места посадки, что само по себе лишь приблизительно ожидается.
особенности
Марсоходы прибывают на космические корабли и используются в условиях, очень отличных от земных, что предъявляет определенные требования к их конструкции.
Надежность
Роверы должны выдерживать высокие ускорения, высокие и низкие температуры, давление, пыль, коррозия, космические лучи, оставаясь работоспособными без ремонта в течение необходимого периода времени.
Автономия
Марсоходы, которые приземляются на небесные тела, далекие от Земли, такие как Марсоходы, нельзя управлять дистанционно в реальном времени, так как скорость, с которой распространяются радиосигналы слишком медленно для в реальном времени или почти в реальном времени общение. Например, отправка сигнала с Марса на Землю занимает от 3 до 21 минуты. Таким образом, эти марсоходы могут работать автономно с небольшой помощью наземного управления до навигация и получение данных обеспокоены, хотя они по-прежнему требуют участия человека для определения перспективных целей на расстоянии, на которое нужно проехать, и определения того, как позиционировать себя для максимального использования солнечной энергии. [2] Предоставление марсоходу некоторых элементарных возможностей визуальной идентификации для проведения простых различий может позволить инженерам ускорить разведку. [2] Во время столетнего конкурса NASA Sample Return Robot Robot, марсоход по имени Катаглифис, успешно продемонстрировала возможности автономной навигации, принятия решений и обнаружения, извлечения и возврата образцов. [3]
Безколесные подходы
История
Луноход 0 (№ 201)
Советский вездеход задумывался как первый передвижной дистанционно управляемый робот на Луна, но разбился при неудачном пуске пусковой установки 19 февраля 1969 года.
Луноход 1
В Луноход 1 Марсоход совершил посадку на Луну в ноябре 1970 года. [5] Это был первый передвигающийся робот с дистанционным управлением, который приземлился на любое небесное тело. В Советский Союз запустил Луноход-1 с борта Луна 17 космический корабль 10 ноября 1970 г. и вышел на лунную орбиту 15 ноября. Корабль совершил мягкую посадку в Море дождей 17 ноября. У посадочного модуля были сдвоенные аппарели, с которых Луноход-1 мог спускаться на поверхность Луны, что он и сделал в 06:28 UT. С 17 ноября 1970 г. по 22 ноября 1970 г. марсоход проехал 197 м и за 10 сеансов связи вернул 14 снимков Луны крупным планом и 12 панорамных снимков. Он также проанализировал лунный грунт. Последний успешный сеанс связи с Луноходом-1 был 14 сентября 1971 года. Проработав 11 месяцев, [6] Луноход-1 удерживал рекорд прочности для космических вездеходов более 30 лет, пока не был установлен новый рекорд. Марсоходы.
Лунный вездеход Аполлон
НАСА включены Лунные вездеходы через три Аполлон миссии: Аполлон 15 (который приземлился на Луну 30 июля 1971 г.), Аполлон-16 (который приземлился 21 апреля 1972 г.), и Аполлон-17 (который приземлился 11 декабря 1972 года). [7]
Луноход 2
В Луноход 2 был вторым из двух беспилотный луноходы приземлились на Луна посредством Советский Союз как часть Программа Лунохода. Марсоход вступил в строй на Луна 16 января 1973 г. [8] Это был второй бродячий дистанционно управляемый робот приземлиться на любое небесное тело. В Советский Союз запустил Луноход-2 с борта Луна 21 космического корабля 8 января 1973 г., и он совершил мягкую посадку на восточной окраине Mare Serenitatis 15 января 1973 года. Луноход-2 спустился с двойных аппарелей спускаемого аппарата на поверхность Луны в 01:14 UT 16 января 1973 года. Луноход-2 проработал около четырех месяцев, пройдя 39 км (24 мили) местности, включая холмистую местность. возвышенность области и Rilles, и отправил обратно 86 панорамных изображений и более 80 000 телевизионных изображений. [9] [10] [11] Основываясь на вращении колес, Луноход-2 предположительно преодолел 37 км (23 мили), но российские ученые из Московского государственного университета геодезии и картографии (МИИГАиК) пересмотрели это расстояние до приблизительного 42,1–42,2 км (26,2–26,2 миль). ) на базе Lunar Reconnaissance Orbiter (МРО) изображения лунной поверхности. [12] [13] Последующие обсуждения с их американскими коллегами закончились согласованным окончательным расстоянием в 39 км (24 мили), которое с тех пор остается неизменным. [14] [15]
Проп-М
У советских спускаемых аппаратов «Марс-2» и «Марс-3» на борту был небольшой марсоход массой 4,5 кг, который мог бы перемещаться по поверхности на лыжи при этом соединен с посадочным модулем 15-метровым шлангокабелем. Два небольших металлических стержня использовались для автономного обхода препятствий, поскольку радиосигналам с Земли потребовалось бы слишком много времени, чтобы управлять марсоходами с помощью дистанционного управления. Марсоход планировалось вывести на поверхность после приземления с помощью манипулятора и перемещаться в поле зрения телекамер и останавливаться для измерения через каждые 1,5 метра. Следы марсохода в марсианской почве также должны были быть записаны для определения свойств материала. Из-за аварийной посадки Марса 2 и сбоя связи (15 секунд после посадки) Марса 3 ни один марсоход не был развернут.
Луноход 3
Советский марсоход должен был стать третьим передвижным роботом с дистанционным управлением на Луне в 1977 году. Миссия была отменена из-за отсутствия пусковой установки и финансирования, хотя марсоход был построен.
Марсоход
Марсоход был тяжелый Советский вездеход (гибрид, с обоим управлением дистанционное управление и автоматический), нацеленный на Марс, часть Марс 4НМ и планируется начать после 1973 г. (по планам 1970 г.). Он должен был быть запущен Ракета N1, который никогда не летал успешно. [16]
Соджорнер
Планетарный инструмент для обработки поверхностей Beagle 2
Бигль 2 был разработан для исследования Марса с помощью небольшого «крота» (Planetary Undersurface Tool, или PLUTO), который можно развернуть рукой. У PLUTO был сжатый пружинный механизм, позволяющий ему перемещаться по поверхности со скоростью 20 мм в секунду и зарываться в землю, собирая подземный образец в полости на его наконечнике. Beagle 2 потерпел неудачу при попытке приземлиться на Марс в 2003 году.
Марсоход для исследования Дух
Дух это робот-вездеход на Марсе, работал с 2004 по 2010 год. Это был один из двух марсоходов НАСАпродолжается Марсоход для исследования миссия. Он успешно приземлился на Марс в 04:35 Наземное UTC 4 января 2004 г., за три недели до своего близнеца, Возможность (MER-B), приземлился на другом конце планеты. Его название было выбрано Конкурс студенческих эссе, спонсируемый НАСА. Марсоход застрял в конце 2009 года, а его последнее сообщение с Землей было отправлено 22 марта 2010 года.
Юту Ровер из Chang’e 3
Чанъэ 3 это Китайский Лунная миссия это включает робот луноход Юту, названный в честь домашнего кролика Изменить, богиня Луны в китайской мифологии. Запущен в 2013 году с Чанъэ 3 миссия, это первый китайский луноход, первая мягкая посадка на Луну с 1976 года и первый марсоход, который работал там со времен Советского Союза. Луноход 2 прекратил свою деятельность 11 мая 1973 г. [18] Он был запущен на Луну 14 декабря 2013 года, и к концу второго лунного дня марсоход столкнулся с эксплуатационными трудностями. [19] после выживания и успешного восстановления в первую 14-дневную лунную ночь (около месяца на Луне), [20] и не мог двигаться после окончания второй лунной ночи, хотя продолжал собирать полезную информацию в течение нескольких месяцев после этого. [21] В октябре 2015 г. Юту установил рекорд по длительности эксплуатации марсохода на Луне. [22] 31 июля 2016 г. Юту перестал работать через 31 месяц, что значительно превышает его первоначальный ожидаемый срок службы в три месяца. [23]
Марсоход для исследования Возможность
Возможность это робот-вездеход на планете Марс, активен с 2004 по начало 2019 года. Запущен с Земля 7 июля 2003 г. он приземлился на Марсианин Meridiani Planum 25 января 2004 в 05:05 Наземное UTC (около 13:15 местное время), через три недели после своего близнеца Дух (MER-A) приземлился на другой стороне планеты. 28 июля 2014 года НАСА объявило, что Возможность, проехав более 40 км (25 миль) по планете Марс, установил новый рекорд «вне мира», когда марсоход проехал наибольшее расстояние, превзойдя предыдущий рекорд Советского Союза. Луноход-2 луноход который проехал 39 км (24 мили). [24] [25] (связанное изображение)
Активные миссии марсохода
Расположение активного ровера в контексте
Марсоход научной лаборатории Любопытство
26 ноября 2011 года НАСА Марсианская научная лаборатория миссия была успешно запущена на Марс. Миссия успешно приземлила робот Любопытство марсоход на поверхности Марса в августе 2012 года. В настоящее время марсоход помогает определить, мог ли Марс когда-либо поддерживать жизнь, и искать доказательства прошлого или настоящего жизнь на Марсе. [26] [27]
Запланированные миссии марсохода
Чандраяан 3
ЭкзоМарс Розалинд Франклин
Европейское космическое агентство (ESA) разработало и провело первые прототипы и испытания Розалинд Франклин вездеход. По состоянию на 2020 год [Обновить] Запуск марсохода запланирован на конец 2022 года. [28]
Миссия марсохода 2020
В Миссия марсохода 2020 это Марс вездеход разработан НАСА запущен в 2020 году. Он предназначен для расследования астробиологически соответствующая древняя среда на Марсе, исследуйте его поверхность геологические процессы и история, в том числе оценка его прошлого обитаемость и потенциал для сохранения биосигнатуры в пределах доступных геологических материалов. [29]
Чанъэ 5
Эта китайская миссия состоит из спускаемого аппарата и транспортного средства для возврата образцов. Его запуск запланирован на 2020 год. [30]



