Два вида физических величин: скалярные величины и векторные величины
«Что-то я не помню такой темы в физике» — первое, что, наверное, пришло вам в голову. Да, вы правы — тема незаметная, но в некоторых учебниках она присутствует. «А нужна она мне для ЕГЭ?» Нужна. Точно нужна. Очень нужна. Постоянно нужна.
Давайте приступим. Надо запомнить, что в физике (школьной) есть два типа физических величин:
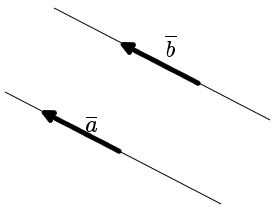
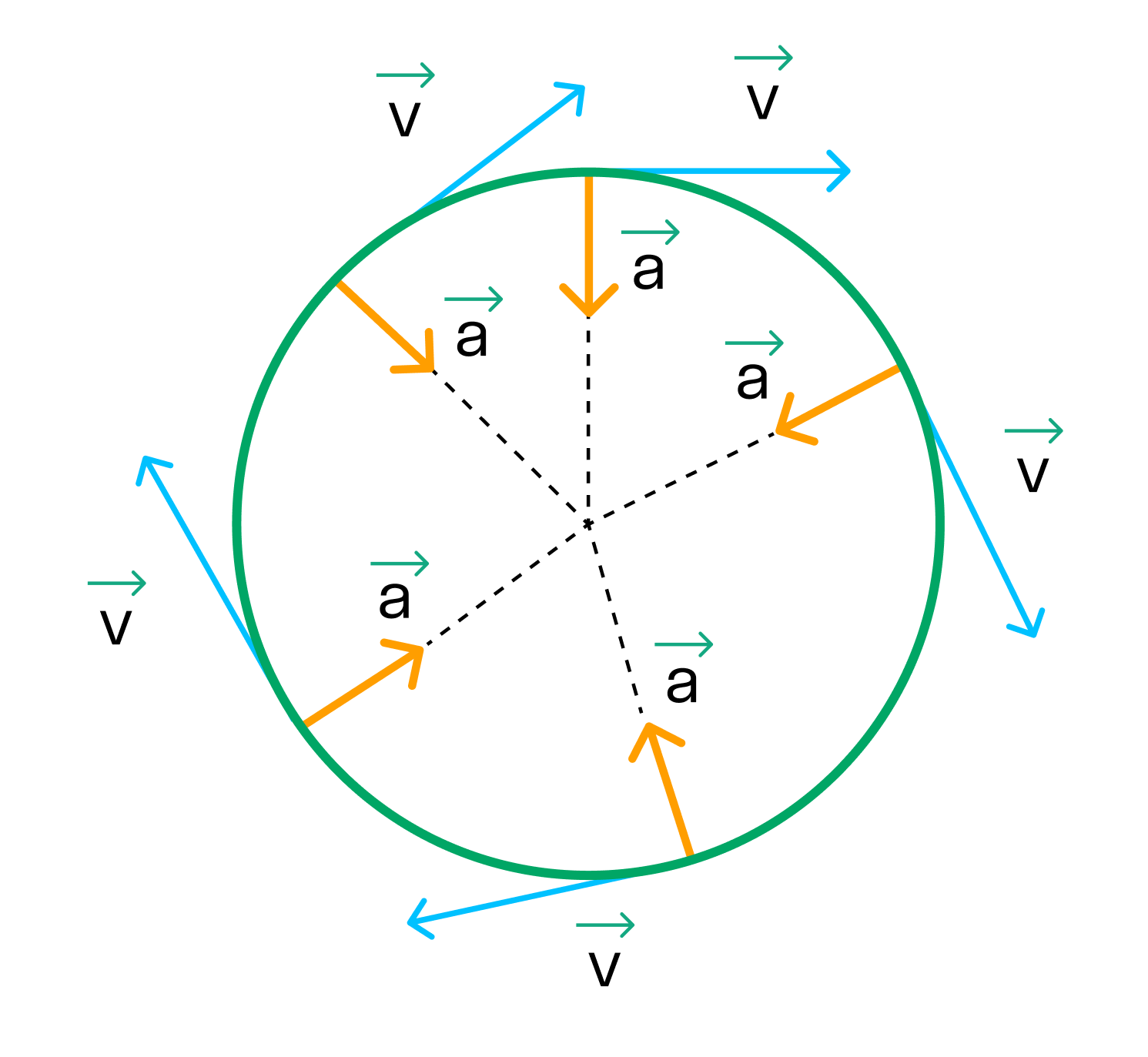
Векторная величина. Что это такое? Давайте вспомним (а для тех, кто не знал — узнаем), что

Направление вектора изображается на картинке. Куда показывает вектор — туда он и направлен. Например, бывает так, что вектор направлен вверх, вниз и т.д. Вектор может быть направлен вдоль какой-то плоскости. Примеры можете видеть на картинках.
Ну, самое простое — это опыт. Решая задачи, читая теоретический материал, вы со временем запомните, какие величины векторные, а какие скалярные. Физических величин не так много, как может показаться.
А способ чуть посложнее — это представить эти величины и решить для себя: могут они иметь направление? Если да — то это вектор, если нет — скаляр.
Например: заряд конденсатора. Если заряд имеет направление, то куда он направлен? Непонятно — поэтому, скорее всего, заряд — это скалярная величина.
Другой пример: длина отрезка. Если эта физическая величина имеет направление, то откуда куда она направлена: от точки 1 до точки 2? Или от точки 2 до точки 1? Трудно выбрать — поэтому, скорее всего, длина отрезка — это скаляр.

Какие из представленных на рисунках величин являются скалярными, а какие — векторными?
Механическое движение
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
Механическое движение
Когда мы идем в школу или на работу, автобус подъезжает к остановке или сладкий корги гуляет с хозяином, мы имеем дело с механическим движением.
Механическим движением называется изменение положения тел в пространстве относительно других тел с течением времени.
«Относительно других тел» — очень важные слова в этом определении. Для описания движения нам нужны:
В совокупности эти три параметра образуют систему отсчета.
В механике есть такой раздел — кинематика. Он отвечает на вопрос, как движется тело. Дальше мы с помощью кинематики опишем разные виды механического движения. Не переключайтесь 😉
Прямолинейное равномерное движение
Движение по прямой, при котором тело проходит равные участки пути за равные промежутки времени называют прямолинейным равномерным. Это любое движение с постоянной скоростью.
Например, если у вас ограничение скорости на дороге 60 км/ч, и у вас нет никаких препятствий на пути — скорее всего, вы будете двигаться прямолинейно равномерно.
Мы можем охарактеризовать это движение следующими величинами.
Скалярные величины (определяются только значением)
Векторные величины (определяются значением и направлением)
Проецирование векторов
Векторное описание движения полезно, так как на одном чертеже всегда можно изобразить много разнообразных векторов и получить перед глазами наглядную «картину» движения.
Однако всякий раз использовать линейку и транспортир, чтобы производить действия с векторами, очень трудоёмко. Поэтому эти действия сводят к действиям с положительными и отрицательными числами — проекциями векторов.
Если вектор сонаправлен с осью, то его проекция равна длине вектора. А если вектор противоположно направлен оси — проекция численно равна длине вектора, но отрицательна. Если вектор перпендикулярен — его проекция равна нулю.

Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики.
Скорость — это векторная физическая величина, которая характеризует быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
Скорость
→ →
V = S/t
→
V — скорость [м/с]
→
S — перемещение [м]
t — время [с]
Средняя путевая скорость
V ср.путевая = S/t
V ср.путевая — средняя путевая скорость [м/с]
S — путь [м]
t — время [с]
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = S/t
Подставим значения:
V ср.путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уроки физики в онлайн-школе Skysmart не менее увлекательны, чем наши статьи!
Уравнение движения
Основной задачей механики является определение положения тела в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
Уравнение движения
x(t) = x0 + vxt
x(t) — искомая координата [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v


Скорость может определяться по вектору перемещения и пути, только это будут две разные характеристики. Скорость — это векторная физическая величина, характеризующая быстроту перемещения, а средняя путевая скорость — это отношение длины пути ко времени, за которое путь был пройден.
Скорость
→ →
V = S/t
Средняя путевая скорость
V ср.путевая = S/t
V ср.путевая — средняя путевая скорость [м/с]
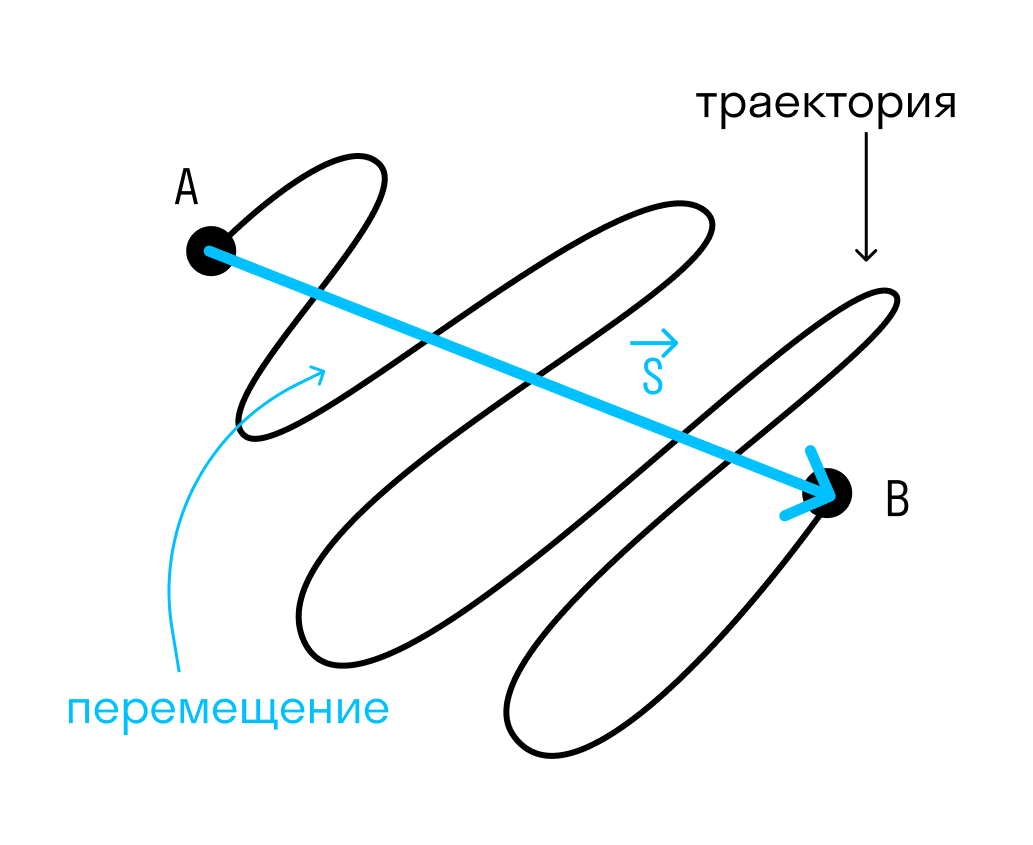
В чем разница между перемещением и путем?
Перемещение — это вектор, проведенный из начальной точки в конечную, а путь — это длина траектории.
Задача
Найдите, с какой средней путевой скоростью должен двигаться автомобиль, если расстояние от Санкт-Петербурга до Великого Новгорода в 210 километров ему нужно пройти за 2,5 часа. Ответ дайте в км/ч.
Решение:
Возьмем формулу средней путевой скорости
V ср.путевая = 210/2,5 = 84 км/ч
Ответ: автомобиль будет двигаться со средней путевой скоростью равной 84 км/ч
Уравнение движения
Основной задачей механики является определение положения тела в данный момент времени. Для решения этой задачи помогает уравнение движения, то есть зависимость координаты тела от времени х = х(t).
Уравнение движения
x(t) = x0 + vxt
x(t) — искомая координата [м]
x0 — начальная координата [м]
vx — скорость тела в данный момент времени [м/с]
t — момент времени [с]
Если положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v

Задачка
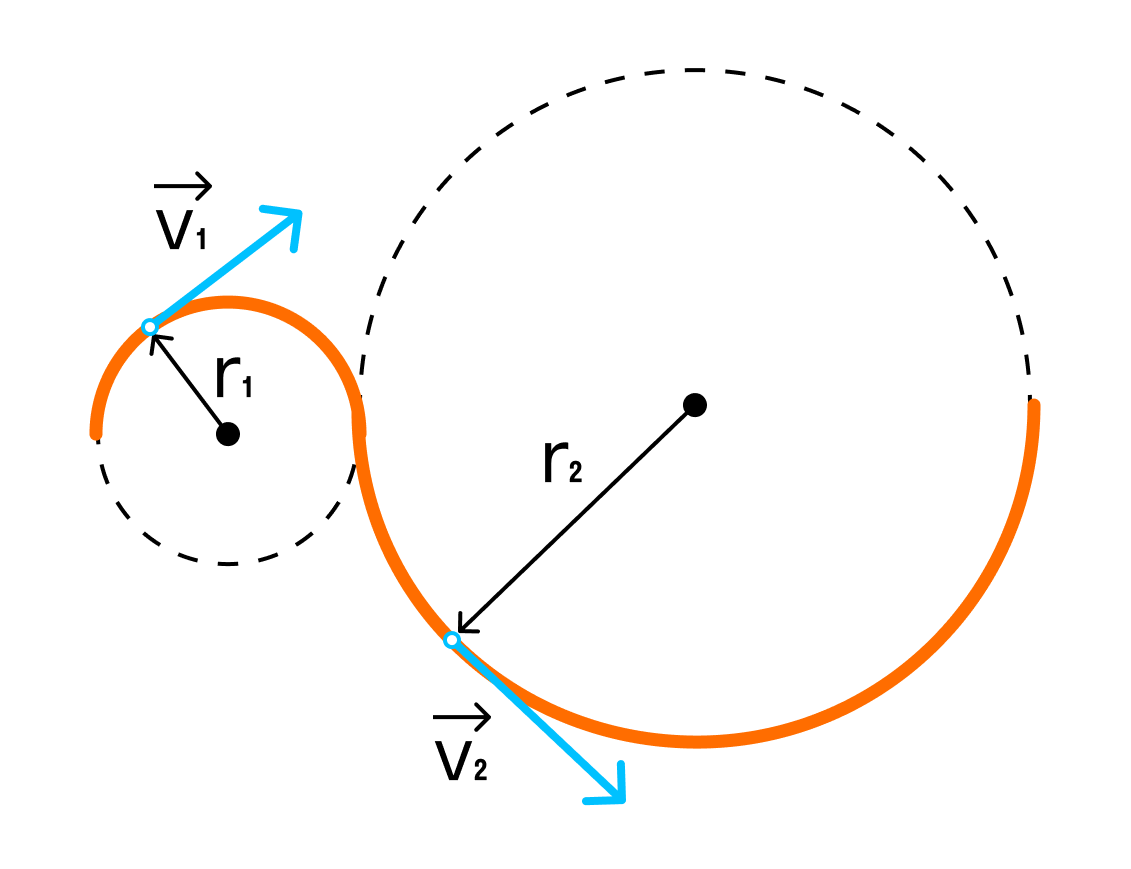
Мотоцикл движется по закруглённому участку дороги радиусом 120 м со скоростью 36 км/ч. Чему равно центростремительное ускорение мотоцикла?
Решение:
Возьмем формулу центростремительного ускорения тела
В условии задачи скорость дана в километрах в час, а радиус в метрах. Значит, нужно перевести скорость в м/с, чтобы избежать коллапса в решении.
Теперь можно подставить значения в формулу:
aц = 10^2/120 = 100/120 = 10/12 ≃ 0,83 м/с^2
Ответ: центростремительное ускорение мотоциклиста равно 0,83 м/с^2
Эту и другие темы мы разбираем на курсе физики за 9 класс.
Основные кинематические величины

Радиус-вектор – это вектор, который соединяет начало координат с положением тела в пространстве.
Траектория – это кривая линия по которой движется тело.
Перемещение – это вектор, который соединяет начальное и конечное положение тела на траектории.
Путь – скалярная величина, которая равна длине траектории.
Скорость – это физическая величина, которая показывает насколько быстро движется тело. Бывает: а) мгновенная, б) средняя по пути, в) средняя по перемещению.
Ускорение – это векторная физическая величина, которая характеризует быстроту изменения скорости. Бывает: а) нормальное (центростремительное), б) тангенсальное, в) полное.
Тангенсальное ускорение характеризует быстроту изменения скорости по величине.
Нормальное ускорение характеризует быстроту изменения скорости по направлению.
Полное ускорение – это сумма тангенсальной и нормальной составляющих.
2) Основные законы сохранения в динамике пост и вращ движения.
Поступательное движение – это движение тела, при котором прямая, соединяющая любые 2 точки этого тела при перемещении остаётся параллельно своему первоначальному направлению.
Вращательное движение вокруг оси — движение твёрдого тела, при котором какие-нибудь две его точки А. и В остаются всё время неподвижными.
3) Динамика поступательного движения. Законы Ньютона.
Динамика поступательного движения – скорость изменения импульса системы равна главному вектору всех внешних сил, действующих на эту систему.
Основное уравнение динамики поступательного движения: 
Инерциальной системой отсчёта является такая система, которая либо покоится, либо движется равномерно и прямолинейно относительно какой-то другой инерциальной системы.
Первый закон Ньютона:
Тело находится в состоянии покоя или равномерного и прямолинейного движения пока воздействие со стороны других тел не заставит изменить его это состояние.
Второй закон Ньютона:
Ускорение, приобретаемое телом пропорционально вызывающей его силе, совпадает с ней по направлению и обратно пропорционально массе тела (dP = Fdt).Для системы материальных точек: dP = ∑(от k = 1 до N)Fk*dt
Третий закон Ньютона:
Все реальные силы в природе являются силами взаимодействия между двумя телами: если 1 действует на тело 2 с силой F12, то тело 2 действует на тело 1 с силой F21(F12=-F21).Т. е. силы с которыми 2 тела взаимодействуют друг с другом равны по модулю но противоположны по направлению (F12 + F21 = 0).
Для системы из N взаимодействий между собой тел 3 закон Ньютона выглядит так:
F12+F21+F13+F31+…= ∑(от i=1 до N)∑(от j=1 до N)Fij =0.
Скорость изменения импульса системы материальных точек равен векторной сумме внешних сил действующих на систему (dP=∑(от k=1 до N)Fk*dt). Это выражение отражает так же и закон сохранения импульса для незамкнутой системы: импульс системы могут изменить только импульсы внешних сил. Если система замкнутая, то:
∑(от k = 1 до N)Fk*dt=0 => dP=0, т. е. импульс замкнутой системы P = ∑(от i = 1 до n)Pi=const.
Моментом импульса материальной точки I относительно начала координат называется векторная величина, которая равна: I = τP
Моментом импульса системы материальных точек L относительно начала координат называется векторная сумма моментов частиц систем.
dL/dt = 0, L=∑(от i = 1 до n)Ii=const – закон сохранения момента импульса для заданной системы.
4) Основное уравнение динамики вращательного движения: M=J*ε => F=ma.
Кинетическая энергия вращающегося твердого тела:
5) Понятие работы и мощности. Работа переменной силы.
Работа (А) – мера измерения механической энергии бA=F*dR, dR – перемещение тела, F – сила.
Мощность (N) – скалярное произведение силы приложенной к телу на скорость тела. N=dA/dt.
Работа переменной силы –


Консервативные силы – работа которых не зависит от формы пути между двумя точками (при перемещении тела между ними). Все силы, не являющиеся консервативными, называются неконсервативными силами. К ним относятся, прежде всего, так называемые диссипативные силы, например силы трения, возникающие при скольжении одного тела относительно другого.
6) Основные понятия динамики вращательного движения. Момент силы и импульса.
Введем понятие абсолютно твердого тела. Будем рассматривать абсолютно твердое тело как систему жестко связанных материальных точек. При вращательном движении абсолютно твердого тела все его точки описывают окружности лежащие в плоскостях перпендикулярно оси Оz.
Момент инерции материальной точки: J=m*r2 m – масса, r – расстояние от точки до оси.
Момент силы относительно точки и неподвижной оси: Mz=F*R=Jz*ε, F – сила, R – радиус, ε – угловое ускорение.
Момент импульса относительно точки и неподвижной оси: Lz=J*ω, J – момент инерции, ω – угловая скорость.
Момент инерции тела относительно произвольной оси Оz равен моменту инерции тела относительно оси Оz0 проходящей через центр масс тела параллельно оси Оz + произведение массы тела на квадрат расстояния между Оz и Оz0.
Пусть Оz0 – ось параллельная оси Оz и проходит через центр масс тела. Расстояние между осями Оz и Оz0 = d. Оси Оz и Оz0 перпендикулярны рисунку.
7) Потенциальная и кинетическая энергия
К механической энергии относят два вида энергии: Кинетическая и Потенциальная.
При поступательном движении кинетическая эн. Тела массой m, движущ. Тела v равна:
Кинетическая энергия механической системы равна сумме кинетических энергий всех частей этой системы
Kc-мы=∑Ki=∑(mivi2)/2 ( от i=1 До n) n-число тел.
Изменение кинетической энергии системы равно работе сил, действ-х на эту систему мсо стороны др. тел или полей.
Потенциальная энергия  — скалярная физическая величина, характеризующая способность некого тела (или материальной точки) совершать работу за счет его нахождения в поле действия сил.
— скалярная физическая величина, характеризующая способность некого тела (или материальной точки) совершать работу за счет его нахождения в поле действия сил.
Энергия. Кинетическая и потенциальная энергия. Закон сохранения и изменения механической энергии.
Потенциальная энергия мех. энергия системы тел, определяемая их взаимным расположением, и характером сил взаимодействия межу ними. Работа dA выражается как скалярное произведение силы F на перемещение dr. Работа совершается за счёт уменьшения потенциальной энергии. 
Полная мех. энергия системы равна сумме кинетической и потенциальной энергии. E=T+П.
Рассмотрим взаимодействие двух частиц. Пусть потенциальная энергия их взаимодействия определяется функцией U(x), где x — расстояние между частицами. Для определённости положим, что частицы отталкиваются с силой F. Под действием этой силы расстояние между частицами изменится на dx, следовательно будет совершена работа A = F dx. При этом, поскольку частицы отодвинулись, то потенциальная энергия их взаимодействия U изменилась на величину
dx. При этом, поскольку частицы отодвинулись, то потенциальная энергия их взаимодействия U изменилась на величину  dU (уменьшилась). Отсюда получаем
dU (уменьшилась). Отсюда получаем
Таким образом, в случае потенциальных сил, сила F есть производная от потенциальной энергии U по параметру x с обратным знаком.
8) Колебания. Дифференц. Ур-ия колебаний(гармонич, незатух, затух, вынужд) и их решения
Колебания-процессы, характериз-ся той или иной степенью повторяемости во времени. Они могут быть мех-ми, электромагн. И др. Колебания периодические, если они повторяются через определенные промежутки времени.
Минимальный из них это Период T. За период совершается одно полное колебание. Число полных колебаний в ед. вр. Назыв. Частотой колебаний.
ω=2  это круговая или циклическая частота
это круговая или циклическая частота
Период: T=
При периодический колебаниях величины x за время t выполняется след. Соотношение
Гармоническим колебательным движением называется периодич. Движ., при котором смещение точки от положения равновесия в зависимости от времени t измен. По закону синуса
Скорость v и ускорение (а) при гар. Кол. Измен-ся по закону
V= =ẋ=A ω0cos (ω0t+α)
=ẋ=A ω0cos (ω0t+α)
a= =ẍ=-A
=ẍ=-A 02sin(ω0t+α)
02sin(ω0t+α)
отсюда следует что при гар. Кол. Ускорение прямопропорц-но смещению точки от положения равновесия и всегда направлено противопол. Ему
Из этих уравнений получаем дифференциальное уравнение гарм. кол
ẍ+ 02=0 а уравнение (1) которое выше, является его решением
сила гар. Кол F=-m ω20x.
m ω20=k –коэффицент возвр силы. Н численно равен возвр силе, вызыв смещение х на ед.
Круговая частота в гар. кол : 0=
Период гар. кол: T0=2
При гар. кол полная мех. энергия складывается из кин. И пот. Энергии E =  +
+
Всякое колебание мат. точки, не поддерж. Извне, затухает из-за наличия сил сопротивления.
Диф-ное уравнение: 
где k — коэффициент упругости в законе Гука, c — ускорение горизонтального движения грузика.
Решение его: х=А0е-βtsin(ωt+α)
Если β=0 уравнение выше переходит в уравнение незатухающих колебаний.
Β= ; ω=
; ω=
Период затухающих кол.:
Т=2π/ω
Логарифмический декремент затухания: ∂=ln(At/At+T)
Собственные (или свободные) — колебания при отсутствии внешних сил, когда система, после первоначального воздействия внешней силы, предоставляется самой себе (в реальных условиях свободные колебания всегда затухающие)
Если ω меньше или равна 0 то колебаний нет. система совершает апериодические колебания. Приближ к равновесию.
Вынужденные кол. — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Сила в этом случае
По 2-му зак Ньютона
ẍ+ 0sinΏt/m это дифференциальное уравнение вынужденных коллебаний
0sinΏt/m это дифференциальное уравнение вынужденных коллебаний
Решение его: х=А0е-βtsin(ωt+α)+Asin(
Вынужденные складываются из затух и незатух. Происходящих с частотой Ώ.
Установившиеся вынужд кол. Х= Аsin(Ώt+Ѱ)
Амплитуда вынуж. Кол. А=F0/m*(sqrt[(ω02-Ώ2)2+4β2Ώ2])
Где ω0=sqrt(k/m) частота собст колеб, β=r/2m-коэфф. Затух
9) Термодинамические и статистические методы исследование термодинамич.
Систем. Давление и темпер. Идеал. газа. Понятие о равновеном процессе. Уравнение состояния идеального газа. Изопроцессы.
Термодинамич. Системы состоят из большого числа частиц.
Термодинамич. Метод исследов. Основан на описании состояния системы с помощью некоторых макроскопических параметровЮ, характер-х состояние системы в целом к ним относят оббьем, давление, температуру.
Термодинамика изучает равновесные состояние вещества, при которых термодин. Параметры вещ-ва остаются пост. И равными своим средним значениям по всему обьему..
Число частиц: N=vNA где NA-число авагадро(6.02*1023) v-кол-во вещества.
v=m/μ где μ-молярная масса в-ва.
Идеальный газ – это газ молекулы которого можно рассматривать как материальные точки, взаимодействие которых между собой происходит только в момент соударения.
Уравнение состояния(Клапейрона-Мендлеева)- PV= RT, gde m-масса газа, R – универс. газ. пост.(8.31 дж/к*моль)
RT, gde m-масса газа, R – универс. газ. пост.(8.31 дж/к*моль)
Для 1 моля уравнение такое : PV=RT
Переход термодин. системы из одного состояния в другое называется термодин. процессом.
Изохорический процесс(V-const) закон Шарля.
Изобарический проц. P-const закон Гей-люссака V/T=const
Изотермический проц.(T=const) закон Бойля-Мариотта PV=const
Равнове́сный тепловой процесс — тепловой процесс, в котором система проходит непрерывный ряд бесконечно близких равновесных термодинамических состояний.
Равновесный тепловой процесс называется обратимым, если его можно провести обратно и в телах, окружающих систему, не останется никаких изменений.
Реальные процессы изменения состояния системы всегда происходят с конечной скоростью, поэтому не могут быть равновесными. Реальный процесс изменения состояния системы будет тем ближе к равновесному, чем медленнее он совершается, поэтому равновесные процессы называют квазистатическими.
10) первое начало термодинамики, внутренняя энергия ид. Газа. Теплота. работа.
∂Q=dU+∂A это 1-е начало термод. Означает что количество теплоты подеденное к системе расходуется на изменение энергии и совершение работы.
Количество теплоты положительное если оно подводится к системе и отрицательно если отводится.
Внутрення энергия системы является функцией состяния и не зависит от вида процесса. Бесконечно малое изменение внутр. эн. dU является полным дифференциалом т. е.
∆U1-2= =U2-U1
=U2-U1
Количество теплоты и работа не являются функциями состояния и зависят от способа перехода системы. Поэтому ∂Q и ∂A не явл. Полными диффер-ми.
Элем-ая работа газа при малом изменении его обьема записано так: ∂A=PdV
Из состояния 1 в 2 выглядит так: A1-2=
Работа газа положительна, если в процессе происходит расширение газа(обьем увелич) и отрицательна при уменьшении обьема газа.
11) Адиабатический процесс. Уравнение Пуассона. 1-е начала термодинамики для Адиабат. процесса
Адиабатический процесс – это процесс расширения газа, при котором выполняется 2 условия: а) внешнее давление постоянно и равно давлению самого газа, б) газ остаётся теплоизолированным.
Адиабатический процесс описывается уравнением Пуассона: P*Vγ = const.
Адиабатическое расширение сопровождается охлаждением, а сжатие нагреванием.
12) Вероятностное описание случайных событий. Функция распределения Максвела по модулю скорости
Рассмотрим систему из N молекул заполняющую некоторый объем V. Разобъем пространство на бесконечно – малые объемы dV, тогда число dN молекул в нем определяется следующим соотношением dW=dN/N есть вероятность, что первая произвольная выбранная молекула газа в момент времени t окажется в объеме dV.
W(t, r) = dW/dV – плотность вероятности или функция распределения молекул в пространстве. Для описания микроскопического состояния газа используют функции f = f(t, r,v). Функция распределения Максвелла дает распределение по скорости молекул в газе. F(v) = 4π(α/π)3/2 *v2 * exp(-α* v2).
Физический смысл функции Максвела заключается в следующем: в соответствии с определением вероятности выражения f(v)dv, модуль скоростей которые лежат в интервале(v, v+dv) при этом относительное кол-во молекул скорости которые лежат в интервале от V1 до V2 будет выражено: N
13. Распределение Больцмана. Барометрическая формула.
Постоянная Больцмана (k или kb) — физическая постоянная, определяющая связь между температурой и энергией. Названа в честь австрийского физика Людвига Больцмана, сделавшего большой вклад в статистическую физику, в которой эта постоянная играет ключевую роль. Её экспериментальное значение в системе СИ равно
Числа в круглых скобках указывают стандартную погрешность в последних цифрах значения величины. Постоянная Больцмана может быть получена из определения абсолютной температуры и других физических постоянных. Однако, вычисление постоянной Больцмана с помощью основных принципов слишком сложно и невыполнимо при современном уровне знаний. В естественной системе единиц Планка естественная единица температуры задаётся так, что постоянная Больцмана равна единице.
Универсальная газовая постоянная определяется как произведение постоянной Больцмана на число Авогадро, R = kNA. Газовая постоянная более удобна, когда число частиц задано в молях.
Барометрическая формула — зависимость давления или плотности газа от высоты в поле тяжести. Для идеального газа, имеющего постоянную температуру T и находящегося в однородном поле тяжести (во всех точках его объёма ускорение свободного падения g одинаково), барометрическая формула имеет следующий вид:

где p — давление газа в слое, расположенном на высоте h, p0 — давление на нулевом уровне (h = h0), M — молярная масса газа, R — газовая постоянная, T — абсолютная температура. Из барометрической формулы следует, что концентрация молекул n (или плотность газа) убывает с высотой по тому же закону:

где m — масса молекулы газа, k — постоянная Больцмана.
Барометрическая формула может быть получена из закона распределения молекул идеального газа по скоростям и координатам в потенциальном силовом поле (см. Статистика Максвелла — Больцмана). При этом должны выполняться два условия: постоянство температуры газа и однородность силового поля.
15. Второе начало термодинамики (его формулировки). Принцип работы тепловой машины. Цикл Карно.
Второе начало термодинамики: в процессах, происходящих в замкнутой системе, энтропия не убывает.
По Кельвину: невозможен круговой процесс единственным результатом которого является превращение теплоты полученной от нагревателя, в эквивалентную ей работу.
По Клаузиусу: невозможен круговой процесс единственным результатом которого является передача теплоты от менее нагретого тела к более нагретому.
Без совершения работы нельзя отбирать теплоту от менее нагретого тела и отдавать её более нагретому.

Термический КПД цикла Карно 
Записав для адиабат

16. Применение 1-ого начала термодинамики к изопроцессам. Работа расширения газа в изопроцессах.
В изотермическом процессе температура постоянная, следовательно, внутренняя энергия не меняется. Тогда уравнение первого закона термодинамики примет вид: Q=A’, т. е. количество теплоты, переданное системе, идет на совершение работы при изотермическом расширении, именно поэтому температура не изменяется.
В изобарном процессе газ расширяется и количество теплоты, переданное газу, идет на увеличение его внутренней энергии и на совершение им работы:Q=ΔU+A’.
При изохорном процессе газ не меняет своего объема, следовательно, работа им не совершается, т. е. А = 0, и уравнение первого закона имеет вид Q= ΔU, т. е. переданное количество теплоты идет на увеличение внутренней энергии газа.
Адиабатным называют процесс, протекающий без теплообмена с окружающей средой. Q = 0, следовательно, газ при расширении совершает работу за счет уменьшения его внутренней энергии, следовательно, газ охлаждается, A’= ΔU Кривая, изображающая адиабатный процесс, называется адиабатой.
1) Изотермическое сжатие
Для вывода 1 закона термодинамики воспользуемся интерактивной моделью изотермического сжатия ( рис.2) и графическим истолкованием работы для процесса ( рис.3)



Первый закон термодинамики выглядит так:
Q = A
Газ совершает работу за счет поглощения тепла из внешней среды ( внутренняя энергия не изменяется)
3) Изобарное нагревание.
Воспользуемся интерактивной моделью и (пронаблюдаем изобарное нагревание) ( рис. 8) и графическим представлением работы ( рис. 9)



При изобарном нагревании температура увеличивается (  T>0 ), внутренняя энергия увеличивается (U>0), газ совершает работу, тепло поглощается.
T>0 ), внутренняя энергия увеличивается (U>0), газ совершает работу, тепло поглощается.
Первый закон термодинамики выглядит так:
Q = U – A
Газ получает тепло из внешней среды. Полученная таким образом энергия тратится на увеличение внешней энергии и на совершение работы.
4) Изобарное охлаждение
Пронаблюдав процесс изобарного охлаждения на интерактивной модели ( рис.11) и воспользовавшись рис.12 можем сделать вывод:



Первый закон термодинамики выглядит так:
U=Q
Газ увеличивает свою внутреннюю энергию за счет теплоты, полученной из внешней среды.
Интерпретация 1 закона термодинамики для изохорного нагревания представлена на рис. 16
6) Изохорное охлаждение
Изохорное охлаждение пронаблюдаем на интерактивной модели ( рис17) и графиком на рис 18. Вывод:



рис. 17 рис. 18 рис. 19
При изохорном охлаждении ( T =0. Аналогично = =0. Однако средние значения квадратов проекций скорости не равны нулю! Определим для i-ой молекулы
vi2 = vix2 + viy2 + viz2.

Поскольку все направления эквивалентны, то
Уравнение среднеквадратичной скорости молекулы легко выводится из основного уравнения МКТ для одного моля газа.
 , для 1 моля N = Na, где Na — постоянная Авогадро
, для 1 моля N = Na, где Na — постоянная Авогадро
Nam = Mr, где Mr — молярная масса газа

19. Принцип относительности в классической и релятивистской механике. Постулаты Эйнштейна. Преобразования Лоренца.
Механический принцип относительности Галилея.
При описании физических явлений мы всегда пользуется какой-либо системой отсчета. Например, движение тел мы чаще всего рассматриваем относительно земли, т. е. условно принимаем земной шар за неподвижное тело.
Найдем связь между координатами x, y,z некоторой точки Р в системе К и координатами x’,y’,z’ так же точки в системе К’. Если начать отсчет времени с того момента, когда начала координат обеих систем совпадали, то x=x’+v0t (1). Кроме того, что y=y’ и z=z’ (2).
Добавив и этим соотношениям принятое в классической механике предположение, что время в обоих системах течет одинаковым образом, т. е. что t=t’, и получим совокупность четырех уравнений: x=x’+v0 t ; y=y’; z=z’ ; t=t’ (3); называемых преобразованием Галилея.
Продифференцировав эти отношения, найдем связь между скоростями точки Р по отношению и системам отсчета К и К’:  (4);
(4);  (5);
(5);  (6) или
(6) или  (7),
(7),  ;
;  (8). Эти соотношение дают правило сложения скоростей в классической механике. С одним словом Г. Галилей ввел в классическую механику принцип относительности, смысл которого следующий: никакими механическими опытами нельзя установить, покоится инерциальная система отсчета или движется равномерно и прямолинейно.
(8). Эти соотношение дают правило сложения скоростей в классической механике. С одним словом Г. Галилей ввел в классическую механику принцип относительности, смысл которого следующий: никакими механическими опытами нельзя установить, покоится инерциальная система отсчета или движется равномерно и прямолинейно.
Все выше сказанное справедливo лишь при значениях  , малых сравнению со скоростью света в вакууме, которую мы будем обозначать буквой С
, малых сравнению со скоростью света в вакууме, которую мы будем обозначать буквой С  . При больших скоростях
. При больших скоростях  , сравнимых с С, для изучения движения тел, создали новая механика, которая включить себя классическую механику Ньютона как частный, предельный случай и называли релятивистической механикой.
, сравнимых с С, для изучения движения тел, создали новая механика, которая включить себя классическую механику Ньютона как частный, предельный случай и называли релятивистической механикой.
Постулаты специальной теории относительности.
Для описания движений, совершающихся со скоростями, с равными с. С, Эйнштейн создал релятивистическую механику, т. е. механику, учитывающую требование специальной теории относительности.
Основу этой теории образуют два постулата, которые носят названия принципа относительности Эйнштейна и принципа постоянства скорости света. Согласно принципа относительности Эйнштейна все законы природы одинаковы во всех инерциальных системах отсчета.
Принцип постоянства скорости света утверждает, что скорость света в вакууме одинакова во всех инерциальных системах отсчета и не зависит от движения источников и приёмников света.
Рассмотрим две инерциальные системы отсчета, которые мы обозначим К и К’. рис. Предположим, система координат К’ движется относительно системы К с постоянной скоростью v. Распространение светового сигнала в положительном направлении оси х описывается уравнением:  (9). Для системы координат К’ аналогичное уравнение имеет вид:
(9). Для системы координат К’ аналогичное уравнение имеет вид:  (10).
(10).
Движению, происходящему в обеих системах координат, должны удовлетворять как уравнение (9), так и уравнение (10), что выполняется, если имеет место соотношение:  (11), где l-постоянная величина. Для лучей, распространяющихся в отрицательном направлении оси Х, уравнение (11) имеет вид:
(11), где l-постоянная величина. Для лучей, распространяющихся в отрицательном направлении оси Х, уравнение (11) имеет вид:  (12), где m-постоянная величина. Введем новые постоянные:
(12), где m-постоянная величина. Введем новые постоянные:  (13),
(13),  (14). Тогда,
(14). Тогда,  (15),
(15),  (16). Определим постоянные а и в.
(16). Определим постоянные а и в.
Рассмотрим некоторые выводы из теории относительности, вытекающие из преобразования Лоренца.
1. Из преобразований Лоренца для координат х и x’ и времени t и t’ следует, что  . В противном случае эти координаты и времена окажутся мнимыми. Скорость v относительного движения двух инерциальных систем отсчета не может превосходить скорости света в вакууме.
. В противном случае эти координаты и времена окажутся мнимыми. Скорость v относительного движения двух инерциальных систем отсчета не может превосходить скорости света в вакууме.
2. Пусть стержень MN движется вместе с системой отсчета K’ относительно системы К. рис. Длина стержня в системе К’ равна:  (25). Длина тела в системе отсчета, где оно покоится
(25). Длина тела в системе отсчета, где оно покоится  , называется собственной длиной. Для определения длины
, называется собственной длиной. Для определения длины  движущегося стержня в системе К необходимо найти координаты х2 и х1 точек N и M конца и начала стержня в один и тот же момент времени по часам в системе К’:
движущегося стержня в системе К необходимо найти координаты х2 и х1 точек N и M конца и начала стержня в один и тот же момент времени по часам в системе К’:  (26). Из преобразований Лоренца следует, что
(26). Из преобразований Лоренца следует, что  (27), или
(27), или  (28). Длина тела зависит от скорости его движения. Собственная длина тела является его наибольшей длиной. Линейный размер тела, движущегося относительно инерциальной системы отсчета уменьшается в
(28). Длина тела зависит от скорости его движения. Собственная длина тела является его наибольшей длиной. Линейный размер тела, движущегося относительно инерциальной системы отсчета уменьшается в  раз. Из преобразований Лоренца следует, что
раз. Из преобразований Лоренца следует, что  и
и  (29), т. е. поперечные размеры тела не зависит от скорости его движения и одинаковы во всех инерциальных системах отсчета.
(29), т. е. поперечные размеры тела не зависит от скорости его движения и одинаковы во всех инерциальных системах отсчета.



