Статические и динамические характеристики электропривода
Вы будете перенаправлены на Автор24
Функциональная схема электрического привода
Электрический привод — это электромеханическая система, которая предназначена для приведения в движение рабочих органов механизмов и машин, а также управления их технологическим процессом.
Пример функциональной схема автоматизированного электропривода изображен на рисунке ниже.
Рисунок 1. Схема автоматизированного электропривода. Автор24 — интернет-биржа студенческих работ
Здесь: Пру — преобразовательное устройство; ИСУ-информационная система управления; СПУ — силовое преобразовательное устройства; РД — ротор двигателя; ЭМП — электромеханический преобразователь; ИМ — исполнительный механизм; ПУ — передаточное устройство; ДОС — датчик обратной связи; ЗУ — задающее устройство.
Таким образом электропривод состоит из четырех основных частей:
Готовые работы на аналогичную тему
Статические и динамические характеристики электропривода
Статические характеристик современных электроприводов делятся на:
Механическая характеристика электропривода — это зависимость скорости вращения вала от момента, который развивает двигатель.
Математически механическая характеристика выражается следующим образом:
где: w – угловая скорость вращения вала; n – скорость вращения вала.
Механическая характеристика является естественной в том случае, когда вышеозначенные зависимости получаются при номинальных параметрах сети питания, без добавочных сопротивлений в цепи двигателя и нормальной схеме включения. Когда в цепи двигателя присутствуют добавочные сопротивления или питание двигателя осуществляется от сети, с частотой или напряжением отличным от номинального, то механическая характеристика будет искусственной. Таким образом у электропривода может быть только одна естественная механическая характеристика, а искусственных большое количество.
Механические характеристики, в зависимости от степени жесткости делятся на жесткие, мягкие и абсолютно жесткие. Абсолютно жесткая характеристика возникает в том случае, когда величина жесткости бесконечна. Жесткая механическая характеристика образуется при небольшом падении скорости при увеличении момента и степени жесткости 40-10. Такими характеристиками обладают двигатели постоянного тока с независимым возбуждением и асинхронные двигатели в пределах линейного участка. Мягким механическим характеристикам свойственны большое относительное падение при увеличении момента и жесткость не выше 10. Таким характеристиками обладают двигатели постоянного тока с последовательным возбуждением, с независимым возбуждением с большим сопротивлением в цепи якоря, а также асинхронные двигатели с дополнительным сопротивлением в цепи ротора. Пример механических характеристик изображен на рисунке ниже.
Рисунок 2. Механические характеристики. Автор24 — интернет-биржа студенческих работ
Здесь: 1 — абсолютно жесткая механическая характеристика; 2 — жесткая механическая характеристика двигателя постоянного тока с независимым возбуждением; 3 — жесткая механическая характеристика асинхронного двигателя в пределах нелинейного участка; 4 — мягкая механическая характеристика двигателя постоянного тока с последовательным возбуждением. Электромеханическая характеристика представляет собой электромеханическую скоростную характеристику зависимости частоты вращения якоря от тока нагрузки и характеристику зависимости вращающего момента от тока нагрузки. Данные характеристики снимаются при неизменном напряжении.
Динамическими характеристиками электрического привода выражаются зависимости координат механической части привода от времени, а также угловой скорости от времени. Допустим, что к элементу, угловая скорость которого равна 0, приложены два момента одновременно: статический (Мс) и вращающий электромагнитный (М=f(w)). Если представить зеркальное отображение статического момента в первом квадранте координатной плоскости, то зависимость динамического момента будет иметь следующий вид (заштрихованная часть).
Рисунок 3. Зависимость динамического момента. Автор24 — интернет-биржа студенческих работ
С увеличением угловой скорости вращения динамический момент уменьшается и при некотором ее значении будет равен 0. Найдем динамический момент: М-Мс. Для этого составляются дифференциальные уравнения, а после их решения строятся динамические характеристики:
Что такое статическая характеристика двигателя
Читайте также
– Статические характеристики (режимы работы САР)
Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида у = F(u, f), в которых отсутствует время… [читать подробнее].
– Статические характеристики двигателей постоянного тока последовательного возбуждения
Можно применить формулы (4) и (5), но магнитный поток зависит от тока (см. рисунок 3.4), т.е. (1); (2); где R=Rя+Rов+Rд Ф=f(I) не имеет точного аналитического выражения, поэтому вводим допущение: кривую 1 заменяем прямой 2. Ф=&… [читать подробнее].
– Статические характеристики двигателей постоянного тока независимого возбуждения
На рисунке 3.1: Rя = rоя + rко + rдп + rщ, где rоя – обмотки якоря; rко – компенсационной обмотки; rдп – добавочных полюсов; rщ – щеточного контакта; R = Rя + Rд – сопротивление якорной цепи Принимаем следующие допущения: 1) реакцией якоря пренебрегаем; 2) момент на валу… [читать подробнее].
– Статические характеристики двигателей постоянного тока последовательного возбуждения
Можно применить формулы (4) и (5), но магнитный поток зависит от тока (см. рисунок 3.4), т.е. (1); (2); где R=Rя+Rов+Rд Ф=f(I) не имеет точного аналитического выражения, поэтому вводим допущение: кривую 1 заменяем прямой 2. Ф=&… [читать подробнее].
Регуляторы давления. Схемы. Регуляторы давления (РД) применяются в пневмосистемах для понижения давления до заданного уровня и его стабилизации с заданной точностью. РД применяются в схемах ИСГ для понижения давления от уровня давления в баллоне до… [читать подробнее].
– Статические характеристики двигателей постоянного тока независимого возбуждения
На рисунке 3.1: Rя = rоя + rко + rдп + rщ, где rоя – обмотки якоря; rко – компенсационной обмотки; rдп – добавочных полюсов; rщ – щеточного контакта; R = Rя + Rд – сопротивление якорной цепи Принимаем следующие допущения: 1) реакцией якоря пренебрегаем; 2) момент на валу… [читать подробнее].
Регуляторы давления. Схемы. Регуляторы давления (РД) применяются в пневмосистемах для понижения давления до заданного уровня и его стабилизации с заданной точностью. РД применяются в схемах ИСГ для понижения давления от уровня давления в баллоне до… [читать подробнее].
– Схемы включения и статические характеристики двигателя
Основная схема включения ДПТ НВ приведена на рис. 4.1 [1; 9; 10; 14]. Рис. 4.1. Схема включения ДПТ НВ В этой схеме: U – напряжение питания якоря; Uв – напряжение питания обмотки возбуждения; I – ток якоря; Iв – ток возбуждения; Rя= Rобмя + Rдп+ Rко + Rщк, сопротивление… [читать подробнее].
– Статические характеристики элементов автоматики
Характеристики, определяющие процессы, протекающие в элементах автоматики в установившемся режиме, называются статическими. Статическими характеристиками являются: – передаточный коэффициент, – абсолютная и относительная погрешность, – область нечувствительности…. [читать подробнее].
– Статические характеристики асинхронного двигателя
Что такое статическая характеристика двигателя
Главное меню
Судовые двигатели
Если необходимо подчеркнуть те или иные взаимосвязи между параметрами, справедливые для установившихся режимов, из всего многообразия взаимосвязей (6) выбирают лишь необходимые и на их основе строят статические характеристики двигателя. Если воспользоваться для этой цели поверхностью

Таким образом, каждая точка любой статической характеристики, т. е. каждая точка, лежащая на поверхности А и определяемая функциональной зависимостью (6), соответствует только одному установившемуся режиму, а каждая статическая характеристика двигателя представляет собой последовательную совокупность установившихся режимов, выраженных определенными параметрами при определенных условиях (например, постоянство того или иного параметра).

Все сказанное о статических характеристиках свидетельствует о том, что их применяют для определения тех или иных статических свойств двигателя. Каждая статическая характеристика иллюстрирует взаимосвязь параметров при установившихся режимах работы двигателя в определенных условиях.
Модель ZIP
Эта модель также называется полиноминальной. Она широко используется как для анализа установившихся режимов, так и переходных процессов[1], [2]. Эта модель представляет собой зависимость потребляемой мощности от напряжения в виде полиномиального уравнения, которое объединяет в себе компоненты постоянного сопротивления (Z), тока (I) и мощности (P):
[math]displaystyle P = P_0 left( a_
где [math]P[/math] и [math]Q[/math] – активная и реактивная мощность, потребляемая нагрузкой при напряжении [math]V[/math] ; [math]P_0[/math] и [math]Q_0[/math] – активная и реактивная мощность, потребляемая нагрузкой при номинальном напряжении [math]V_<ном>[/math] ; [math]a_
статическая характеристика электродвигателя
Смотреть что такое «статическая характеристика электродвигателя» в других словарях:
ДИНАМИКА ПРИВОДОВ — см. также о словаре гидродвигатель гидромашина гидронасос гидроцилиндр … Теория механизмов и машин
ГОСТ Р 50369-92: Электроприводы. Термины и определения — Терминология ГОСТ Р 50369 92: Электроприводы. Термины и определения оригинал документа: 3 (электро) двигатель (электропривода): Электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую.… … Словарь-справочник терминов нормативно-технической документации
ГОСТ 19350-74: Электрооборудование электрического подвижного состава. Термины и определения — Терминология ГОСТ 19350 74: Электрооборудование электрического подвижного состава. Термины и определения оригинал документа: 48. Активное статическое нажатие токоприемника Нажатие токоприемника на контактный провод при медленном увеличении его… … Словарь-справочник терминов нормативно-технической документации
максимальная — максимальная: Максимально возможная длина ЗО, в пределах которой выполняются требования настоящего стандарта и технических условий (ТУ) на извещатели конкретных типов, Источник: ГОСТ Р 52651 2006: И … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 41.13-H-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения — Терминология ГОСТ Р 41.13 H 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1 антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения автоматически … Словарь-справочник терминов нормативно-технической документации
система — 4.48 система (system): Комбинация взаимодействующих элементов, организованных для достижения одной или нескольких поставленных целей. Примечание 1 Система может рассматриваться как продукт или предоставляемые им услуги. Примечание 2 На практике… … Словарь-справочник терминов нормативно-технической документации
Характеристики — К.4. Характеристики Применяют следующие дополнительные характеристики: К.4.3.1.2. Номинальное напряжение изоляции Минимальное значение номинального напряжения изоляции должно быть 250 В. К.4.3.2.1. Условный тепловой ток на открытом воздухе… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 41.13-Н-99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения — Терминология ГОСТ Р 41.13 Н 99: Единообразные предписания, касающиеся официального утверждения легковых автомобилей в отношении торможения: 2.1. антиблокировочная система: Элемент системы рабочего тормоза, который во время торможения… … Словарь-справочник терминов нормативно-технической документации
3.11. Статические характеристики асинхронных двигателей
Для получения выражений статических характеристик с помощью приведенной на рис. 3.27, бупрощенной схемы замещения определим вначале ток фазы ротора как функцию параметров двигателя:
 , (3.73)
, (3.73)
где  — индуктивное сопротивление короткого замыкания.
— индуктивное сопротивление короткого замыкания.
Активная электромагнитная мощность, передаваемая через воздушный зазор ротору двигателя, может быть записана в виде
 (3.74)
(3.74)
или же через электромагнитный момент и скорость поля двигателя:
 (3.75)
(3.75)
Приравнивая (3.74) и (3.75), получаем уравнение статической механической характеристики двигателя в виде зависимости
 . (3.76)
. (3.76)
Анализ функции (3.76) показывает, что она имеет точки экстремума; критическое скольжение, соответствующее экстремуму, может быть определено путем дифференцирования (3.76) по sи последующего приравнивания нулю этой производной:
 . (3.77)
. (3.77)
Подставляя (3.77) в (3.76), получаем выражение критического момента:
 . (3.78)
. (3.78)
С учетом (3.77) и (3.78) уравнение (3.76) может быть после преобразований представлено в форме так называемой уточненной формулы Клосса:
 , (3.79)
, (3.79)
Нетрудно видеть, что при  механическая характеристика близка к линейной зависимости
механическая характеристика близка к линейной зависимости , а в области больших скольжений (
, а в области больших скольжений ( ) имеет гиперболичес-кий характер:
) имеет гиперболичес-кий характер: .Приs=sкмомент принимает максимальные значения, причем в двигательном режиме (sк,дв> 0) соответствующее значение критического моментаMк,дв, как это следует из (3.78), меньше, чемМк,гв генераторном режиме(sк,г 0) ток ротора монотонно возрастает, стремясь при
.Приs=sкмомент принимает максимальные значения, причем в двигательном режиме (sк,дв> 0) соответствующее значение критического моментаMк,дв, как это следует из (3.78), меньше, чемМк,гв генераторном режиме(sк,г 0) ток ротора монотонно возрастает, стремясь при  к асимптоте:
к асимптоте: . В генераторном режиме (s 1), двигатель переходит в тормозной режим противовключения. В этом режиме на естественной характеристике двигателя с фазным ротором поток снижен,
. В генераторном режиме (s 1), двигатель переходит в тормозной режим противовключения. В этом режиме на естественной характеристике двигателя с фазным ротором поток снижен,  весьма мал, поэтому двигатель развивает небольшие значения тормозного момента, потребляя из сети в основном реактивный ток, превышающий номинальный в 5—10 раз. Поэтому режим противовключения на естественной характеристике двигателя с фазным ротором также на практике не используется.
весьма мал, поэтому двигатель развивает небольшие значения тормозного момента, потребляя из сети в основном реактивный ток, превышающий номинальный в 5—10 раз. Поэтому режим противовключения на естественной характеристике двигателя с фазным ротором также на практике не используется.
Область  (s
(s
Номинальном режиме машина насыщена (рис. 3.32), при U1=U1 НОМдопустимо только увеличение частоты , что вызывает
, что вызывает
соответствующее уменьшение потока  . В соответствии с (3.78) увеличениеf1приводит к уменьшению критического момента из-за увеличения
. В соответствии с (3.78) увеличениеf1приводит к уменьшению критического момента из-за увеличения  и повышения реактансов рассеяния
и повышения реактансов рассеяния . Критическое скольжение при этом также уменьшается, а скорость идеального холостого хода увеличивается, как показано на рис. 3.31,г.
. Критическое скольжение при этом также уменьшается, а скорость идеального холостого хода увеличивается, как показано на рис. 3.31,г.
При необходимости уменьшения частоты  снижения скорости
снижения скорости  необходимо дополнительно изменять напряжение питанияU1. Таким образом, чтобы поток поддерживался примерно постоянным. Соответственно наиболее эффективные возможности управления асинхронным двигателем обеспечиваются использованием в качестве управляюще-го воздействия в канале регулирования скорости частотыf1, а в канале регулирования потока напряженияU1.
необходимо дополнительно изменять напряжение питанияU1. Таким образом, чтобы поток поддерживался примерно постоянным. Соответственно наиболее эффективные возможности управления асинхронным двигателем обеспечиваются использованием в качестве управляюще-го воздействия в канале регулирования скорости частотыf1, а в канале регулирования потока напряженияU1.
Приведенный анализ основан на предположении, что при данной механической характерис-тике в любой ее точке параметры двигателя  ,
,  ,
,  ,
,  остаются неизменными. Известно, что это допущение вполне приемлемо в пределах рабочего участка механической характеристики, а приs > sK является в большинстве случаев грубым. При больших токах сказывается насыщение зубцов, что вызывает уменьшение индуктивного сопротивления рассеяния. С возрастанием частоты тока ротора существенно проявляется эффект вытеснения тока, вызывающий увеличение активного сопротивления роторной обмотки
остаются неизменными. Известно, что это допущение вполне приемлемо в пределах рабочего участка механической характеристики, а приs > sK является в большинстве случаев грубым. При больших токах сказывается насыщение зубцов, что вызывает уменьшение индуктивного сопротивления рассеяния. С возрастанием частоты тока ротора существенно проявляется эффект вытеснения тока, вызывающий увеличение активного сопротивления роторной обмотки  . Для двигателя с фазным ротором, которым можно управлять таким образом, чтобы во всех режимах обеспечивалась работа в пределах рабочего участка его характеристик, указанные изменения параметров не имеют существенного значения. В наиболее массовом варианте асинхронного электропривода с короткозамкнутым ротором двигателя влияние изменений параметров весьма существенно и его необходимо иметь в виду.
. Для двигателя с фазным ротором, которым можно управлять таким образом, чтобы во всех режимах обеспечивалась работа в пределах рабочего участка его характеристик, указанные изменения параметров не имеют существенного значения. В наиболее массовом варианте асинхронного электропривода с короткозамкнутым ротором двигателя влияние изменений параметров весьма существенно и его необходимо иметь в виду.
Схема включения асинхронного короткозамкнутого двигателя приведена на рис. 3.33, а,а варианты статических механических характеристик показаны на рис. 3.33,б. Вотличие от двигателя с фазным ротором пуск короткозамкнутого двигателя осуществляется в большинстве практических случаев прямым включением его обмотки статора в сеть, а для торможения используется режим противовключения. Поэтому область механической характеристики приs > sKимеет для такого двигателя важное значение и определяет его пусковые и тормозные возможности. МоментМП, развиваемый двигателем при  (s= 1), является важным показателем, включаемым в число каталожных данных двигателя в виде величиныМП /МНОМ. Практически при оценке пускового момента следует учитывать возможность понижения напряжения сети на 10 % при снижении каталожного значенияМПна 20 %. Кроме того, для короткозамкнутых двигателей в каталогах указывается кратность пускового тока
(s= 1), является важным показателем, включаемым в число каталожных данных двигателя в виде величиныМП /МНОМ. Практически при оценке пускового момента следует учитывать возможность понижения напряжения сети на 10 % при снижении каталожного значенияМПна 20 %. Кроме того, для короткозамкнутых двигателей в каталогах указывается кратность пускового тока .
.
Для сокращения длительности переходных процессов пуска и торможения желательно увеличивать пусковой и тормозной моменты, а для уменьшения нагрузок на сеть полезно ограничивать пусковые и тормозные токи двигателя. Если двигатель имеет ротор с круглыми пазами, то изменения сопротивления роторной обмотки, обусловленные эффектом вытеснения тока, хотя и вызывают отклонения формы механической характеристики от определяемой (3.79), но не обеспечивают значительного увеличения пускового и тормозного моментов и заметного ограничения соответствующих токов (см. кривую 1на рис. 3.33,6).Изготовление двигателя с увеличенным сопротивлением роторной клетки дает модификацию, называемую двигателем с повышенным скольжением (штриховая кривая2на рис. 3.33,б).При этом достигается увеличение пускового и тормозных моментов, но понижается жесткость рабочего участка механической характеристики, снижается номинальная скорость и возрастают потери в роторной цепи двигателя:
 (3.85)
(3.85)
Соотношение (3.85) свидетельствует о том, что потери в роторной цепи при М=constпропорциональны скольжению. Двигатели с повышенным скольжением имеют номинальное скольжение , что в 2—3 раза превышает номинальное скольжение того же двигателя нормального исполнения. Соответственно возрастают номинальные потери двигателя, что вынуждает при прочих равных условиях снижать допустимый по нагреву (т. е. номинальный) момент и номинальную мощность двигателя. Увеличение потерь в роторной
, что в 2—3 раза превышает номинальное скольжение того же двигателя нормального исполнения. Соответственно возрастают номинальные потери двигателя, что вынуждает при прочих равных условиях снижать допустимый по нагреву (т. е. номинальный) момент и номинальную мощность двигателя. Увеличение потерь в роторной
цепи вызывает также снижение КПД двигателя, поэтому обычно двигатели с повышенным скольжением в установках, работающих длительно с номинальной нагрузкой, не используются.
Более сильно зависит от скольжения активное сопротивление двигателей с глубоким пазом (кривая 3) и особенно с двойной беличьей клеткой (кривая4на рис. 3.33,б). Сопротивление роторной обмотки таких двигателей в номинальном режиме невелико, но сильно увеличивается
при возрастании частоты тока ротора в пусковых режимах и режиме противовключения. Подбором параметров двойной клетки удается обеспечить практическое постоянство момента двигателя в переходных процессах и в то же время обеспечить высокую жесткость рабочего
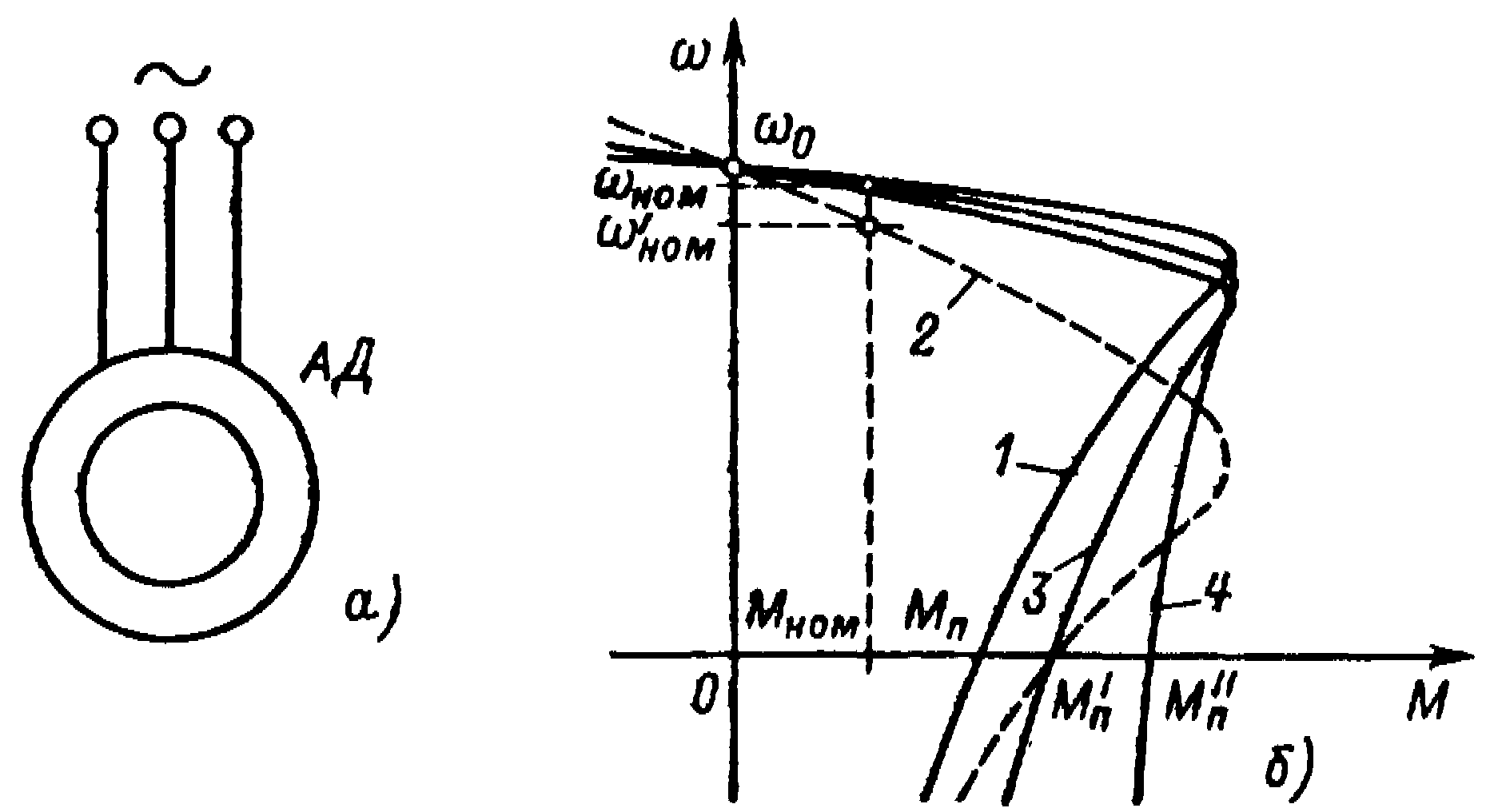
Рис. 3.33. Схема (а) и механические характеристики (б) асинхронного двигателя с короткозамкнутым ротором
участка механической характеристики и значения КПД, близкие к двигателям нормального исполнения. Кроме того, увеличение активного сопротивления двойной беличьей клетки при больших скольжениях ограничивает потребляемый двигателем ток.
Механическая характеристика асинхронного двигателя
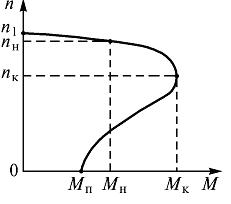
Рис. 1. Механическая характеристика асинхронного двигателя
 Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Пример расчета механической характеристики асинхронного двигателя
Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с напряжением = 380 В при = 50 Гц. Параметры двигателя: P н= 14 кВт, n н= 960 об/мин, cos φн = 0,85, ηн = 0,88, кратность максимального момента k м= 1,8.
Определить: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критический момент, критическое скольжение и построить механическую характеристику двигателя.
Решение. Номинальная мощность, потребляемая из сети
P1 н = P н / ηн = 14 / 0,88 = 16 кВт.
Номинальный ток, потребляемый из сети

p = 60 f / n1 = 60 х 50 / 1000 = 3,
где n1 = 1000 – синхронная частота вращения, ближайшая к номинальной частоте n н= 960 об/мин.
Номинальный момент на валу двигателя
Мк = k м х Мн = 1,8 х 139,3 = 250,7 Н•м.
Критическое скольжение находим подставив М = Мн, s = s н и Мк / Мн = k м.

Для точки пускового режима s п = 1, n = 0 находим
По полученным данным строят механическую характеристику двигателя. Для более точного построения механической характеристики следует увеличить число расчетных точек и для заданных скольжений определить моменты и частоту вращения.

Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:



