GNSS: все, что нужно знать

Введение
Прежде чем мы посмотрим на историю глобальной навигационной спутниковой системы (англ. Global Navigation Satellite System, GNSS, ГНСС; далее как GNSS) или кинематики в реальном времени (RTK или Real Time Kinematic), мы должны рассмотреть исходную технологию, которая положила начало всему этому, известную как спутниковая навигация, ставшая в последствии одной из самых используемых и важных технологий во всем мире. Спутниковая навигационная система (A.K.A. satnav) — это своего рода технология, которая используется для определения местоположения автономных тел, находящихся на поверхности Земли. Для выполнения этой задачи технология спутниковой навигации использует несколько спутников (размещенных в космическом пространстве) для передачи сигнала через канал передатчика и приёмника. Эти сигналы могут использоваться для маркировки местоположения, отслеживания местоположения и многих других целей.
Одна из технологий, на которую часто полагается GNSS, — это кинематика в реальном времени или RTK. Кинематика в реальном времени — это метод глобального спутникового позиционирования, который помогает GNSS повысить достоверность и точность целевых данных. Что касается позиционирования, определения местоположения и максимальной точности, сочетание GNSS с RTK повышает уровень точности, не похожий ни на что другое. RTK усиливает фазовый сигнал, которым обмениваются передатчик и приёмник, обеспечивая, тем самым, точность сантиметрового уровня и корректировку сигнала в реальном времени.

Что такое GNSS или глобальная навигационная спутниковая система?
Глобальные навигационные спутниковые системы были первоначально разработаны ВВС США, тогда технология называлась Global Positioning System или GPS, и её можно было использовать только в вооруженных силах США. Со временем технология GPS стала доступна каждому на этой планете. Теперь, когда каждый смартфон оснащённый GPS находится в лёгком доступе для всех, правительства нескольких стран решили вывести эту технологию на более продвинутый, точный и долгосрочный уровень. Таким образом, появление глобальных навигационных спутниковых систем или GNSS стало официальным явлением для потребителей частного сектора.
В настоящее время, помимо США, ГЛОНАСС России и Галилео Европейского Союза являются двумя основными действующими GNSS, работающими на поверхности нашей планеты. С появлением технологии GNSS начали работать многие вспомогательные технологии, известные как региональные навигационные системы (Regional Navigation Systems). Концепция технологии такая же, как и у GNSS, но охватывает меньше географических областей.
![]()
Как работает глобальная навигационная спутниковая система или GNSS?
Спутники GNSS имеют две несущие волны, зафиксированные в диапазоне L, а именно L1 (1575.42 МГц) и L2 (1227.60 МГц). Основное назначение этих двух диапазонов волн — передавать сигналы с подключенного спутника на поверхность земли. Согласно Techopedia, использование технологии L-диапазона может снизить накладные расходы, обеспечивая при этом надёжное соединение, которое менее подвержено прерываниям. Внедрение L-диапазонов при правильном расположении антенн даёт ряд преимуществ для сельскохозяйственных дронов, морских технологий, удаленного мониторинга и многого другого.
С другой стороны, приёмники GNSS, размещённые на поверхности земли, состоят из антенны и блока обработки. Назначение антенны — принимать кодированные сигналы от подключенных спутников, а задача блока обработки — декодировать сигналы в значимую информацию.

Примечание: для определения положения одного приёмника, GNSS должна собирать данные как минимум с трёх отдельных спутников.
Каждый спутник GNSS вращается вокруг Земли с интервалом 11 часов 58 минут и 2 секунды. Информация о времени, передаваемая спутником, передаётся с помощью кодов, с тем чтобы приёмник мог определить временной интервал, в течение которого передавался код.
Сигналы, передаваемые со спутника, содержат кодированные данные, которые помогают приёмникам точно определять его местоположение, а сам приёмник позиционирует себя точно в соответствии с положением спутника.
IC приёмник вычисляет разницу во времени между временем вещания и временем приёма кодированного сигнала. Как только приёмник позиционируется точно относительно спутника, блок обработки переводит местоположение приёмника с точки зрения широты, долготы и высоты. Вот так на основе этой простой концепции, каждая GNSS работает на поверхности этой планеты.

Применение глобальных навигационных спутниковых услуг
Появление технологии GNSS привело к изменению концепции отслеживания местоположения с высокой степенью точности и широким диапазоном охвата. Существует несколько основных вариантов применения GNSS, которые помогли миру увидеть лучшее будущее.
GNSS для навигации
Среди всех других технологий концепция GNSS оказала большое влияние на навигационные технологии. В последнее время GNSS была включена в автомобильную промышленность, теперь почти каждая автомобильная компания интегрирует технологию GNSS в свои модели автомобилей. Интеграция технологии GNSS помогает водителю легко перемещаться по неизвестным маршрутам, чтобы исследовать дороги мира.

Применение GNSS в навигационной системе не ограничивается только автомобилями, так как теперь эта технология широко используется и в самолётах. Предварительное картирование местности и обновление местности в режиме реального времени по GNSS позволяют пилотам избегать столкновений в воздушном сообщении. Более того, GNSS, используемая в кабинах самолётов, также использует такие технологии, как WAAS или GBAS (LAAS), для повышения точности курса.
Что такое WAAS?
По данным Федерального управления гражданской авиации, в отличие от традиционных наземных навигационных средств, система расширения зоны действия (Wide Area Augmentation System или сокр. WAAS) предоставляет навигационные услуги по всей Национальной системе воздушного пространства (National Airspace System или сокр. NAS). WAAS предоставляет дополнительную информацию приёмникам GPS /WAAS для повышения точности и целостности оценок текущего местоположения.

Что такое GBAS или LAAS?
Исторически сложилось так, что Федеральное управление гражданской авиации (Federal Aviation Administration или сокр. FAA) когда-то упоминало то, что мы теперь называем GBAS, LAAS. Согласно веб-сайту Федерального управления гражданской авиации, наземная система дополнения (Ground-Based Augmentation System или сокр. GBAS) — это система, которая обеспечивает дифференциальные поправки и мониторинг целостности глобальных навигационных спутниковых систем (GNSS).

Помимо широкого спектра применения GNSS в автомобилях и самолётах, GNSS также используется для навигации катеров/яхт и кораблей на поверхности воды.
Примечание: на судах также используется функциональный блок GNSS получивший название «Man Overboard/Человек за бортом» или сокр. MOB. Данная функция позволяет экипажу корабля точно отметить местонахождение человека, упавшего за борт.
GNSS для съёмки и геологического картирования
Геодезическая съёмка и геологическое картирование — ещё одно важное применение GNSS. Большинство приёмников GNSS используют данные сигнала, генерируемые на частоте волны L1, для выполнения геологического картирования. Он оснащён точным кварцевым генератором, который помогает волне уменьшить ошибки часов при картировании. Исследователи могут также проводить высокоточные измерения путем расчёта соответствующего смещения между датчиками GNSS.

Например, если активно деформирующаяся область (скажем вулкан) окружена несколькими приёмными станциями, то GNSS может пригодиться для обнаружения любого вида деформации или движения земли.
Применение GNSS в других отраслях
Помимо вышеуказанных вариантов применения GNSS, к числу важных также можно отнести:

Датчики инерциальных измерительных устройств или системы INS
Инерциальный измерительный блок (Inertial Measurement Unit или инерционный датчик; сокр. IMU) играет жизненно важную роль в глобальных навигационных спутниковых системах. Как уже говорилось выше, система GNSS собирает сигналы данных по крайней мере от трёх из находящихся на орбите спутников, где каждый сигнал, принимаемый приёмниками, является невероятно точен.
Однако, если сигналу препятствуют какие-либо препятствия, такие как деревья, валуны или здания, сигнал больше не может обеспечивать точное позиционирование. Инерциальный измерительный блок — это своего рода инерционный датчик, который вычисляет вращение и ускорение движущегося тела для определения его положения в пространстве.

Немного углубимся в детали
IMU состоит из 6 дополнительных датчиков, расположенных по трём другим ортогональным осям, где каждая из которых также состоит из акселерометра и гироскопа. Задача акселерометра — измерять линейное ускорение движущегося тела, в то время как гироскоп измеряет ускорение вращения. Таким образом, вычисляя значения этих двух сенсоров, система может легко определить точное местоположение движущегося тела.
В тандеме GNSS и IMU предоставляют конечным пользователям более мощные и точные навигационные решения.
Подытожим
Благодаря последним технологическим достижениям, многие концепции и технологии существенно изменили игровое поле для робототехники, спутниковой связи и навигации в том виде, в каком мы их знаем. Глобальная навигационная спутниковая система является ключевым игроком среди инновационных технологий, которые улучшили повседневную жизнь, какой мы знаем её сегодня. Более того, RTK обеспечивает GNSS сантиметровым уровнем точности с возможностью корректировки сигнала в режиме реального времени. Совместное использование GNSS и RTK обеспечивает максимальную точность и высочайшее качество отслеживания, которое вам необходимо. В конце концов, GNSS и RTK составляют самую мощную комбинацию на рынке сегодня.
В этом обзоре мы разобрали все возможные области, касающиеся GNSS, и подробно обсудили её концепции, принципы работы и применение. Надеемся, что представленный материал в полной мере проинформировал вас о технологии GNSS, просветил и вдохновил к достижению поставленных целей. Благодарим за внимание.
Спутниковая система навигации



Спутниковая система навигации — комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты) и времени, а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов.
Содержание
Основные элементы
Основные элементы спутниковой системы навигации:
Принцип работы
Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространяемого радиосигнала каждый спутник навигационной системы излучает сигналы точного времени, используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем, и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
В реальности работа системы происходит значительно сложнее. Ниже перечислены некоторые проблемы, требующие специальных технических приёмов по их решению:
Применение систем навигации
Кроме навигации, координаты, получаемые благодаря спутниковым системам, используются в следующих отраслях:
Современное состояние
В настоящее время работают или готовятся к развёртыванию следующие системы спутниковой навигации:
Принадлежит министерству обороны США. Этот факт, по мнению некоторых государств, является её главным недостатком. Устройства поддерживающие навигацию по GPS являются самыми распространёнными в мире. Также известна под более ранним названием NAVSTAR.
ГЛОНАСС
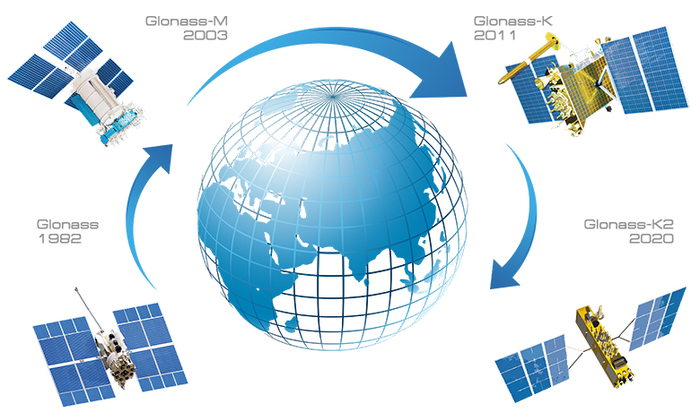
Принадлежит министерству обороны России. Система, по заявлениям разработчиков наземного оборудования, будет обладать некоторыми техническими преимуществами по сравнению с GPS. После 1996 года спутниковая группировка сокращалась и к 2002 году практически полностью пришла в упадок. Была полностью восстановлена только в конце 2011 года. Отмечается малая распространенность клиентского оборудования. К 2025 году предполагается глубокая модернизация системы.
Бэйдоу
Развёртываемая Китаем подсистема GNSS предназначена для использования только в этой стране. Особенность — небольшое количество спутников, находящихся на геостационарной орбите. В настоящий момент выведено на орбиту Земли восемь навигационных спутников. Согласно планам, к 2012 году она сможет покрывать Азиатско-Тихоокеанский регион, а к 2020 году, когда количество спутников будет увеличено до 35, система «Бэйдоу» сможет работать как глобальная. Реализация данной программы началась в 2000 году. Первый спутник вышел на орбиту в 2007-ом.
Galileo
Европейская система, находящаяся на этапе создания спутниковой группировки. Планируется полностью развернуть спутниковую группировку к 2020 году.
IRNSS
Индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в этой стране. Первый спутник был запущен в 2008 году.
Первоначально японская QZSS была задумана в 2002 г. как коммерческая система с набором услуг для подвижной связи, вещания и широкого использования для навигации в Японии и соседних районах Юго-Восточной Азии. Первый запуск спутника для QZSS был запланирован на 2008 г. В марте 2006 японское правительство объявило, что первый спутник не будет предназначен для коммерческого использования и будет запущен целиком на бюджетные средства для отработки принятых решений в интересах обеспечения решения навигационных задач. Только после удачного завершения испытаний первого спутника начнётся второй этап и следующие спутники будут в полной мере обеспечивать запланированный ранее объём услуг.
Основные характеристики систем навигационных спутников
| параметр, способ | СРНС ГЛОНАСС | GPS NAVSTAR | TEN GALILEO |
|---|---|---|---|
| Число НС (резерв) | 24 (3) | 24 (3) | 27 (3) |
| Число орбитальных плоскостей | 3 | 6 | 3 |
| Число НС в орбитальной плоскости | 8 | 4 | 9 |
| Тип орбит | Круговая (e=0±0.01) | Круговая | Круговая |
| Высота орбиты, КМ | 19100 | 20183 | 23224 |
| Наклонение орбиты, градусы | 64.8±0.3 | 56 | |
| Номинальный период обращения по среднему солнечному времени | 11ч 15мин 44±5с | 14 ч 4 мин. и 42 с. | |
| Способ разделения сигналов НС | Частотный | Кодовый | Кодово-частотный |
| Несущие частоты радиосигналов, МГц | L1=1602.5625…1615.5 L2=1246.4375…1256.5 | L1=1575.42 L2=1227.60 L5=1176.45 | E1=1575.42 E5=1191.795 E5A=1176.46 E5B=1207.14 E6=12787.75 |
| период повторения дальномерного кода (или его сегмента) | 1 мс | 1 мс (С/А-код) | нет данных |
| тип дальномерного кода | М-последовательность (СТ-код 511 зн.) | Код Голда (С/А-код 1023 зн.) | М-последовательность |
| тактовая частота дальномерного кода, МГц | 0.511 | 1.023 (С/А-код) 10.23 (P,Y-код) | Е1=1.023 E5=10.23 E6=5.115 |
| Скорость передачи цифровой информации(соответственно СИ- и D- код) | 50 зн/с (50Гц) | 50 зн/с (50Гц) | 25, 50, 125, 500, 100ГЦ |
| Длительность суперкадра, Мин | 2,5 | 12,5 | 5 |
| Число кадров в суперкадре | 5 | 25 | нет данных |
| Число строк в кадре | 15 | 5 | нет данных |
| Система отсчета времени | UTS (SU) | UTS (USNO) | UTS (GST) |
| Система отсчета координат | ПЗ-90/ПЗ90.2 | WGS-84 | ETRF-00 |
| Тип эфемирид | Геоцентрические координаты и их производные | Модифицированные кеплеровы элементы | Модифицированные кеплеровы элементы |
| Сектор излучения от направления на центр земли | ±19 в 0 | L1=±21 в 0 L2=±23.5 в 0 | нет данных |
| Сектор Земли | ±14.1 в 0 | ±13.5 в 0 | нет данных |
Технические детали работы систем
Рассмотрим некоторые особенности основных действующих систем спутниковой навигации (GPS и ГЛОНАСС):
100 м) для гражданского применения и другой высокой точности (
Дифференциальное измерение
Отдельные модели спутниковых приёмников позволяют производить т. н. «дифференциальное измерение» расстояний между двумя точками с большой точностью (сантиметры). Для этого измеряется положение навигатора в двух точках с небольшим промежутком времени. При этом, хотя каждое такое измерение имеет точность порядка 10-15 метров без наземной системы корректировки и 10-50 см с такой системой, измеренное расстояние имеет погрешность намного меньшую, так как факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы в данном месте Земли и т. д.) в этом случае взаимно вычитаются. Кроме того, есть несколько систем, которые посылают уточняющую информацию («дифференциальную поправку к координатам»), позволяющую повысить точность измерения координат приёмника до десяти сантиметров. Дифференциальная поправка пересылается либо с геостационарных спутников, либо с наземных базовых станций, может быть платной (расшифровка сигнала возможна только одним определённым приёмником после оплаты «подписки на услугу») или бесплатной.
В настоящее время (2009 год) существуют бесплатные американская система WAAS, европейская система EGNOS, японская система MSAS основанные на нескольких передающих коррекции геостационарных спутниках, позволяющих получить высокую точность (до 30 см).
Запланировано создание системы коррекции для ГЛОНАСС под названием СДКМ.
См. также
Примечания
Ссылки
Международный форум по спутниковой навигации Мероприятие, посвящённое вопросам спутниковой навигации
Мобильный ГИС для предприятий лесного хозяйства GPS навигация, контроль лесоустроительных данных по спутниковым снимкам, карта лесхоза, таксационное описание в мобильном телефоне.
Система спутниковой навигации GPS – принцип, схема, применение
Спутниковая навигация GPS давно уже является стандартом для создания систем позиционирования и активно применяется в различных трекерах и навигаторах. В проектах Arduino GPS интегрируется с помощью различных модулей, не требующих знания теоретических основ. Но настоящему инженеру должно быть интересно разобраться со принципом и схемой работы GPS, чтобы лучше понимать возможности и ограничения этой технологии.
Схема работы GPS
GPS – это спутниковая навигационная система, разработанная Министерством обороны США, которая определяет точные координаты и время. Работает в любой точке Земли в любых погодных условиях. GPS состоит из трех частей – спутников, станций на Земле и приемников сигнала.
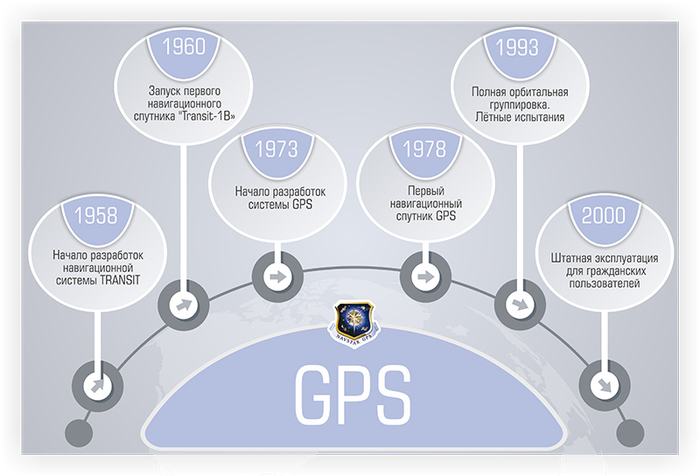
Идея создания спутниковой навигационной системы зародилась еще в 50-е годы прошлого столетия. Американская группа ученых, наблюдающая за запуском советских спутников, заметила, что при приближении спутника частота сигнала увеличивается и уменьшается при его отдалении. Это позволило понять, что возможно измерить положение и скорость спутника, зная свои координаты на Земле, и наоборот. Огромную роль в развитии навигационной системы сыграл запуск спутников на низкую околоземную орбиту. А в 1973 году была создана программа «DNSS» («NavStar»), по этой программе спутники запускались на среднюю околоземную орбиту. Название GPS программа получила в том же 1973 году.
Система GPS на данный момент используется не только в военной области, но и в гражданских целях. Сфер применения GPS много:
Тектоника плит – происходит слежение за колебаниями плит;
Определение сейсмической активности;
Спутниковое отслеживание транспорта – можно проводить мониторинг за положением, скоростью транспорта и контролировать их движение;
Геодезия – определение точных границ земельных участков;
Игры, геотегинт и прочие развлекательные области.
Важнейшим недостатком системы можно считать невозможность получения сигнала при определенных условиях. Рабочие частоты GPS лежат в дециметровом диапазоне волн. Это приводит к тому, что уровень сигнала может снизиться из-за высокой облачности, плотной листвы деревьев. Радиоисточники, глушилки, а в редких случаях даже магнитные бури также могут мешать нормальной передаче сигнала. Точность определения данных будет ухудшаться в приполярных районах, так как спутники невысоко поднимаются над Землей.
Основным конкурентом GPS является российская система ГЛОНАСС (глобальная навигационная спутниковая система). Свою полноценную работу система начала с 2010 года, попытки активно использовать ее предпринимались с 1995 года. Существует несколько отличий между двумя системами:
Разные кодировки – американцы используют CDMA, для российской системы используется FDMA;
Разные габариты устройств – ГЛОНАСС использует более сложную модель, поэтому повышается энергопотребление и размеры устройств;
Расстановка и движение спутников на орбите – российская система обеспечивает более широкий охват территории и более точное определение координат и времени.
Срок службы спутников – американские спутники делаются более качественными, поэтому они служат дольше.
Помимо ГЛОНАСС и GPS существуют и другие менее популярные навигационные системы – европейский Galileo и китайский Beidou.
Принцип работы GPS
Работает система GPS следующим образом – приемник сигнала измеряет задержку распространения сигнала от спутника до приемника. Из полученного сигнала приемник получает данные о местонахождении спутника. Для определения расстояния от спутника до приемника задержка сигнала умножается на скорость света.
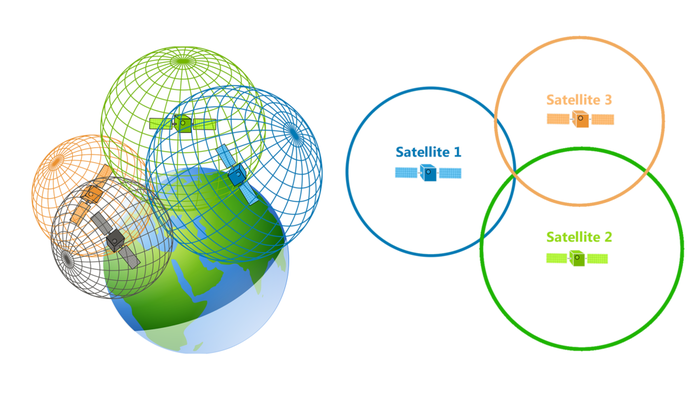
С точки зрения геометрии работу навигационной системы можно проиллюстрировать так: несколько сфер, в середине которых находятся спутники, пересекаются и в них находится пользователь. Радиус каждой из сфер соответственно равен расстоянию до этого видимого спутника. Сигналы от трех спутников позволяют получить данные о широте и долготе, четвертый спутник дает информацию о высоте объекта над поверхностью. Полученные значения можно свести в систему уравнений, из которых можно найти координату пользователя. Таким образом, для получения точного местоположения необходимо провести 4 измерения дальностей до спутника (если исключить неправдоподобные результаты, достаточно трех измерений).
Поправки в полученные уравнения вносит расхождение между расчетным и фактическим положением спутника. Погрешность, которая возникает в результате этого, называется эфемеридной и составляет от 1 до 5 метров. Также свой вклад вносят интерференция, атмосферное давление, влажность, температура, влияние ионосферы и атмосферы. Суммарно совокупность всех ошибок может довести погрешность до 100 метров. Некоторые ошибки можно устранить математически.
Чтобы уменьшить все погрешности, используют дифференциальный режим GPS. В нем приемник получает по радиоканалу все необходимые поправки к координатам от базовой станции. Итоговая точность измерения достигает 1-5 метров. При дифференциальном режиме существует 2 метода корректировки полученных данных – это коррекция самих координат и коррекция навигационных параметров. Первый метод использовать неудобно, так как все пользователи должны работать по одним и тем же спутникам. Во втором случае значительно увеличивается сложность самой аппаратуры для определения местоположения.
Существует новый класс систем, который увеличивает точность измерения до 1 см. Огромное влияние на точность оказывает угол между направлениями на спутники. При большом угле местоположение будет определяться с большей точностью.
Точность измерения может быть искусственно снижена Министерством обороны США. Для этого на устройствах навигации устанавливается специальный режим S/A – ограниченный доступ. Режим разработан в военных целях, чтобы не дать противнику преимущества в определении точных координат. С мая 2000 года режим ограниченного доступа был отменен.
Все источники ошибок можно разделить на несколько групп:
Погрешность в вычислении орбит;
Ошибки, связанные с приемником;
Ошибки, связанные с многократным отражением сигнала от препятствий;
Ионосфера, тропосферные задержки сигнала;
Геометрия расположения спутников.
В систему GPS входит 24 искусственных спутника Земли, сеть наземных станций слежения и навигационные приемники. Станции наблюдения требуются для определения и контроля параметров орбит, вычисления баллистических характеристик, регулировка отклонения от траекторий движения, контроль аппаратуры на бору космических аппаратов.
Характеристики навигационных систем GPS:
Количество спутников – 26, 21 основной, 5 запасных;
Количество орбитальных плоскостей – 6;
Высота орбиты – 20000 км;
Срок эксплуатации спутников – 7,5 лет;
Рабочие частоты – L1=1575,42 МГц; L2=12275,6МГц, мощность 50 Вт и 8 Вт соответственно;
Надежность навигационного определения – 95%.
Навигационные приемники бывают нескольких типов – портативные, стационарные и авиационные. Приемники также характеризуются рядом параметров:
Количество каналов – в современных приемников используется от 12 до 20 каналов;
Наличие картографической поддержки;
Различные технические характеристики – материалы, прочность, защита от влаги, чувствительность, объем памяти и другие.
Принцип действия самого навигатора – в первую очередь устройство пытается связаться с навигационным спутником. Как только связь будет установлена, происходит передача альманаха, то есть информации об орбитах спутников, находящихся в рамках одной навигационной системы. Связи с одним только спутником недостаточно для получения точного местоположения, поэтому оставшиеся спутники передают навигатору свои эфемериды, необходимые для определения отклонений, коэффициентов возмущения и других параметров.
Холодный, теплый и горячий старт GPS навигатора
Включив навигатор впервые или после долгого перерыва, начинается долгое ожидание для получения данных. Долгое время ожидания связано с тем, что в памяти навигатора отсутствуют либо устарели альманах и эфемериды, поэтому устройство должно выполнить ряд действий по получению или обновлению данных. Время ожидания, или так называемое время холодного старта, зависит от различных показателей – качество приемника, состояние атмосферы, шумы, количество спутников в зоне видимости.
Чтобы начать свою работу, навигатор должен:
Найти спутник и установить с ним связь;
Получить альманах и сохранить его в памяти;
Получить эфемериды от спутника и сохранить их;
Найти еще три спутника и установить с ними связь, получить от них эфемериды;
Вычислить координаты при помощи эфемерид и местоположения спутников.
Только пройдя весь этот цикл, устройство начнет работать. Такой запуск и называется холодным стартом.
Горячий старт значительно отличается от холодного. В памяти навигатора уже имеется актуальный на данный момент альманах и эфемериды. Данные для альманаха действительны в течение 30 дней, эфемерид – в течение 30 минут. Из этого следует, что устройство выключалось на непродолжительное время. При горячем старте алгоритм будет проще – устройство устанавливает связь со спутником, при необходимости обновляет эфемериды и вычисляет местоположение.
Существует теплый старт – в этом случае альманах является актуальным, а эфемериды нужно обновить. Времени на это затрачивается немного больше, чем на горячий старт, но значительно меньше, чем на холодный.
Ограничения на покупку и использование самодельных модулей GPS
Российское законодательство требует от производителей уменьшать точность определения приемников. Работать с незагрубленной точностью может производиться только при наличии у пользователя специализированной лицензии.
Под запретом в Российской Федерации находятся специальные технические средства, предназначенные для негласного получения информации (СТС НПИ). К таковым относятся GPS трекеры, которые используются для негласного контроля над перемещением транспорта и прочих объектов. Основной признак незаконного технического средства – его скрытность. Поэтому перед приобретением устройства нужно внимательно изучить его характеристики, внешний вид, на наличие скрытых функций, а также просмотреть необходимые сертификаты соответствия.
Также важно, в каком виде продается устройство. В разобранном виде прибор может не относиться к СТС НПИ. Но при сборе готовое устройство уже может относиться к запрещенным.



