
Содержание
Свойства нелинейных систем
Некоторые свойства нелинейных динамических систем
Анализ и управление нелинейными системами
Существует несколько хорошо разработанных методик анализа нелинейных систем обратной связи:
Также существуют методы проектирования управления для нелинейных систем. Их можно разделить на методы, которые пытаются рассматривать систему как линейную в ограниченном диапазоне операций и используют (хорошо известные) методы линейного проектирования для каждого региона:
Те, которые пытаются ввести вспомогательную нелинейную обратную связь таким образом, чтобы систему можно было рассматривать как линейную для целей проектирования управления:
И методы на основе Ляпунова :
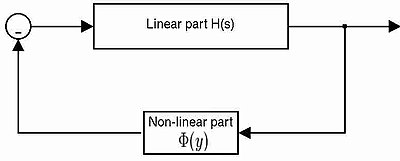
Проблема абсолютной устойчивости
Теоретические результаты в нелинейном управлении
Теорема Фробениуса
Икс ˙ знак равно ∑ я знак равно 1 k ж я ( Икс ) ты я ( т ) <\ displaystyle <\ dot 
ETS 2 «Фикс управления с клавиатуры»
Описание автора :
Версия игры:1.4.х
Автор:Bricklayer
Описание:
1. Увеличена в 2 раза скорость возврата руля в центральное положение.
2. Чуствительность руля теперь зависит от скорости движения. Чем больше скорость, тем меньше чуствительность. Теперь без напряжения можно удержать трак на скорости в своей полосе, избегая виляния по дороге.
3. Реалистичное раскачивание кабины.
4. Уменьшины сопротивление ветра и сила трения, чем увеличен накат трака на любых скоростях. (Частично использованы материалы мода «transmission kabina.scs». Автор: Russell).
5. Уменьшено время «раздумий» трака при нажатии на газ (клавиша «W»).
6. Уменьшено время срабатывания тормозов, можно мягко подтормаживать (кратковременное нажатие клавиши «S») и на малых скоростях.
7. Несколько уменьшены повреждения трака и перевозимого груза.
8. Скорость движения трака ограничена до 110 км/час. На больших скоростях не тестировал, но не исключаю, что на скорости более 115 км/час трак может терять управление, а может и нет.
9. Увеличен угол поворота передних колес. Теперь легче парковать трак с грузом.
Установка:
Поместить файл zzzzzzzzzzzzzFix_keyboard_for_ETS-2_1_4_x.scs в \Мои Документы\Euro Truck Simulator 2\mod.
ВАЖНО: Фикс должен располагаться в самом низу папки mod. Быть последним в списке.
ВАЖНО: Установите настройки игры согласно скриншотам.
Что такое нелинейность управления


Euro Truck Simulator 2





Стандартный интерфейс настройки управления представляет собой привычный вид выбора контроллера и назначения клавиш. Однако, разработчиками заложен расширенный функционал по тонкой и индивидуальной настройке всех возможных параметров, который доступен при ручном редактировании конфигурационного файла профиля:
Обновление параметров, без выхода из игры, работает через смену профиля в меню и повторной его загрузкой.
Изменение конкретного значения переменной производится в строке «MIX» с привязкой к идентификатору устройства с которого планируется управление. Микс определяет выражение, которое используется для вычисления значения одного игрового сигнала управления. Игра может использовать это значение как аналоговую переменную (например, угол вращения рулевого колеса) или как логическое значение (например, переключатель фар). Интерпретация и дополнительная настройка отдельных миксов (в каких ситуациях они применяются) жестко закодированы в игре, и в настоящее время невозможно создать дополнительные миксы в файле конфигурации. В простейшей форме выражение возвращает значение одного параметра, но более сложные формулы могут использовать несколько математических и логических функций для получения результатов из более чем одного входного сигнала управления.
Dsteerleft и dsteerright – функции руления налево/направо.
Работает, но при движении мыши будет происходит соответствующее отклонение камеры, которое тут абсолютно не нужно. Убираем его изменением микса «camlr» при помощи добавления оператора исключения – (! mouse.button_right?0)
Тут оператор добавления сработал некорректно, разработчики рекомендовали заменить его на арифметическое умножение. И не забываем оставить константу чувствительности мыши:
Идеальный результат и очень комфортное управление, рекомендую попробовать всем, кто привык рулить на клавиатуре и постоянно крутить камеру, любуясь проносящимися за окном красотами. Но в тоже время всегда мечтал, откинувшись в кресле на длинном перегоне, слегка подруливать мышью.
Данным инструментарием вы можете расширить стандартный функционал любого вашего устройства, указав соответствующий идентификатор «device» в качестве прификса аргумента.
Нелинейное управление
Нелинейное управление — подраздел теории управления, имеющий дело с нелинейными системами. Поведение нелинейных систем не может быть описано линейными функциями состояния или линейными дифференциальными уравнениями. Для линейных систем существует мощный и удобный математический аппарат, позволяющий проводить их анализ и синтез, однако все эти методы неприменимы или ограниченно применимы для нелинейных систем. Динамика нелинейных систем описывается нелинейными дифференциальными или разностными уравнениями.
Содержание
Свойства нелинейных систем
Анализ и управление нелинейными системами
Существует несколько хорошо проработанных методов анализа нелинейных систем:
Методы синтеза нелинейных систем управления включают:
Ссылки
См. также
Полезное
Смотреть что такое «Нелинейное управление» в других словарях:
нелинейное управление — Управление, при котором хотя бы одно управляющее воздействие вырабатывается посредством нелинейных преобразований координат системы управления. [Сборник рекомендуемых терминов. Выпуск 107. Теория управления. Академия наук СССР. Комитет научно… … Справочник технического переводчика
нелинейное управление — netiesinis valdymas statusas T sritis automatika atitikmenys: angl. nonlinear control vok. nichtlineare Steuerung, f rus. нелинейное управление, n pranc. régulation non linéaire, f … Automatikos terminų žodynas
нелинейное управление — Управление, при котором хотя бы одно управляющее воздействие вырабатывается посредством нелинейных преобразований координат системы управления … Политехнический терминологический толковый словарь
Теория управления — Теория управления наука о принципах и методах управления различными системами, процессами и объектами. Основами теории управления являются кибернетика и теория информации. Суть теории управления состоит в построении математической модели на … Википедия
Нелинейная система — Нелинейная система динамическая система, в которой протекают процессы, описываемые нелинейными дифференциальными уравнениями. Свойства и характеристики нелинейных систем зависят от их состояния. Некоторые виды нелинейных звеньев: звено… … Википедия
Искусственный интеллект — Запрос «ИИ» перенаправляется сюда; см. также другие значения. Искусственный интеллект (ИИ, англ. Artificial intelligence, AI) наука и технология создания интеллектуальных машин, особенно интеллектуальных компьютерных программ. ИИ… … Википедия
Линеаризация обратной связью — заключается в том, чтобы систему вида привести к виду где некоторое внешнее управление. В этом случае нелинейная система становится линейной, а внешнее управление предусмотрено для стабилизации и управления оставшейся линейной частью системы.… … Википедия
ИИ — Искусственный интеллект (ИИ) (англ. Artificial intelligence, AI) это наука и разработка интеллектуальных машин и систем, особенно интеллектуальных компьютерных программ, направленных на то, чтобы понять человеческий интеллект. При этом… … Википедия
Искусственный Интеллект — (ИИ) (англ. Artificial intelligence, AI) это наука и разработка интеллектуальных машин и систем, особенно интеллектуальных компьютерных программ, направленных на то, чтобы понять человеческий интеллект. При этом используемые методы не обязаны… … Википедия
Подходы к пониманию проблемы искусственного интеллекта — Искусственный интеллект (ИИ) (англ. Artificial intelligence, AI) это наука и разработка интеллектуальных машин и систем, особенно интеллектуальных компьютерных программ, направленных на то, чтобы понять человеческий интеллект. При этом… … Википедия
Нелинейные системы управления.
Во всех предыдущих разделах мы изучали свойства систем, элементы которых с достаточной точностью описываются линейными математическими моделями. Однако системы, которые принято считать линейными, являются таковыми только в определенном диапазоне изменения входных сигналов и при изменении условий работы могут стать нелинейными.
Ужесточение требований к качеству работы физических систем автоматики приводит к появлению все более сложных математических моделей, которые все-таки никогда не будут полностью адекватны реальному объекту. Кроме того, характеристики некоторых элементов имеют настолько существенный нелинейный характер, что вообще не могут быть линеаризованы (например, реле с гистерезисом). Таким образом, в ряде ситуаций наиболее точным оказывается описание системы с помощью нелинейных математических моделей.
Почему многие ученые проявляют в настоящее время интерес к совершенствованию и пратическому приложению технологий нелинейного управления?
· Повышение качества существующих систем управления.
Методы с применением линейных законов управления основаны на предположении о малом диапазоне функционирования объекта управления, таком диапазоне, в котором правомерна линеаризованная модель объекта управления. Если требуемый рабочий диапазон является большим, то линейные управляющие устройства работают плохо или приводят к неустойчивости системы вследствие того, что эти устройства не могут компенсировать присущие объекту нелинейности.
Нелинейные управляющие устройства позволяют в широком рабочем диапазоне непосредственно решать проблемы, связанные с нелинейностми. Например, перевернутый маятник.
· Анализ «жестких» нелинейностей
Одно из предположений, связанных с применением линейных управляющих устройств, заключается в том, что нелинейности реально линеаризуемы. Однако системы управления содержат нелинейности разрывного характера, которые в принципе не позволяют осуществить линейную аппроксимацию.
Например, сухое трение, люфт.
· Простота проектирования
Качественное проектирование нелинейных законов управления может быть более простым и интуитивно понятным по сравнению с их линейными аналогами.
· Борьба с неопределенностями модели
Обычно при пректировании линейныхуправляющих устройств предполагают, что параметры объекта управления неизменны и известны. Однако во многих задачах управления приходиться иметь дело с неопределенностями в модели объекта управления. Нелинейности могут быть намеренно включены в управляющее устройство системы управления, так что неопределенности модели могут быть терпимыми.
Два класса нелинейных управляющих устройств используется с этой целью, а именно, робастные управляющие устройства и адаптивные управляющие устройства.
В этом разделе мы дадим некоторые принятые определения нелинейных систем, обсудим способы их описания и отметим основные отличительные особенности по сравнению с линейными моделями.



