Режимы работы (двигательный, генераторный, торможение) двигателя постоянного тока ДПТ

При работе двигателя без нагрузки ток в цепи якоря Ia0 небольшой. При этом частота вращения n = n0 (точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС Ea = 0 и ток двигателя достигает значения 
Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины — тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е.
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря  (штриховая прямая).
(штриховая прямая).
Если при работе двигателя в режиме х.х. к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЭДС Ea начнут возрастать. Когда ЭДС Ea = U , машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого пограничной частотой вращения nxx
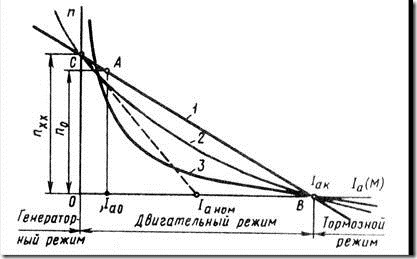
Рис. 29.8. Режимы работы машины постоянного тока:
1 — с параллельным (независимым) возбуждением;
2 — со смешанным возбуждением;
3 — с последовательным возбуждением
При дальнейшем увеличении внешнего момента на валу машины ЭДС Ea станет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторный режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
Основные уравнения двигателя постоянного тока (ДПТ)
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Регулирование частоты вращения двигателя постоянного тока независимого возбуждения ДПТ НВ
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя независимого возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
Дополнительное сопротивление (реостат rд) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления rд в цепь якоря выражение частоты (29.5) принимает вид
где  — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.;
 — изменение частоты вращения, вызванное падением напряжения в цепи якоря.
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением rд возрастает  , что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I 2 a *rД), которые интенсивно растут с увеличением мощности двигателя.
, что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I 2 a *rД), которые интенсивно растут с увеличением мощности двигателя.

Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрег частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя n=f(IВ) при  и
и  .
.
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке  ток якоря достигает значения
ток якоря достигает значения  , т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю
, т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю  . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока
. В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока  частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2 на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)I а , а поэтому потери в регулировочном реостате  невелики.
невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а  от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения ДПТ НВ
Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U = Uимпи ток в ней достигает значения Iamax. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iamax и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
где Т— отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б);  — коэффициент управления.
— коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого  .
.
При импульсном регулировании частота вращения двигателя
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель)  , а частота подачи импульсов равна 200—400 Гц.
, а частота подачи импульсов равна 200—400 Гц.
На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C, шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1C и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи L1C определяется время (с) открытого состояния тиристора:  . Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
. Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения Uср регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей независимого возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
Краткие теоретические сведения. Уравнение электрического состояния для двигателя постоянного тока (ДПТ) с параллельным возбуждением (рис




![]()
![]()
Отсюда  ,
,
где U – напряжение сети;
E = cenФ – противо-ЭДС, индуктируемая
в обмотке якоря при его вращении;
Iя – ток в обмотке якоря;
ce – конструктивный параметр;
n – частота вращения якоря;
Ф – магнитный поток;
Rя – сопротивление обмотки якоря.
 В момент пуска, когда якорь неподвижен, противо-ЭДС равна нулю. Так как сопротивление якоря обычно очень мало, то пусковой ток IяП = U/Rя будет во много раз превосходить номинальный. Это недопустимо, так как увеличение тока приводит к перегреву обмотки и повышенному искрению под щётками, что может привести к выходу коллектора из строя. Для ограничения пускового тока необходимо уменьшить напряжение, подводимое к якорю. Обычно для этой цели применяют пусковые реостаты – регулируемые резисторы, включаемые последовательно обмотке якоря. Сопротивление пускового реостата выбирается таким образом, чтобы пусковой ток не превышал кратковременно допустимого значения (2 ¸ 2,5)Iн.
В момент пуска, когда якорь неподвижен, противо-ЭДС равна нулю. Так как сопротивление якоря обычно очень мало, то пусковой ток IяП = U/Rя будет во много раз превосходить номинальный. Это недопустимо, так как увеличение тока приводит к перегреву обмотки и повышенному искрению под щётками, что может привести к выходу коллектора из строя. Для ограничения пускового тока необходимо уменьшить напряжение, подводимое к якорю. Обычно для этой цели применяют пусковые реостаты – регулируемые резисторы, включаемые последовательно обмотке якоря. Сопротивление пускового реостата выбирается таким образом, чтобы пусковой ток не превышал кратковременно допустимого значения (2 ¸ 2,5)Iн.
На рис. 2 показана схема подключения ДПТ параллельного возбуждения с использованием пускового реостата Rд и регулятора тока возбуждения Rв. При включении двигателя цепь возбуждения должна находиться под полным напряжением сети, что обеспечивается предварительной установкой минимального сопротивления Rв. Одновременно устанавливают сопротивление Rд максимальным. Это обеспечивает достаточно большой пусковой момент Mп = смIяпФ при относительно малом пусковом токе, см = 30се/p. При отключении двигателя от сети цепь обмотки возбуждения не разрывается, а остаётся замкнутой на обмотку якоря, этим исключаются опасные перенапряжения, способные привести к пробою изоляции обмотки возбуждения.
Пуск непосредственным включением (без пускового реостата) применяется только для ДПТ малой мощности (до 1 кВт), имеющих сравнительно большое сопротивление якоря.
Важное значение имеет механическая характеристика двигателя – зависимость частоты вращения двигателя от момента сопротивления n=f(М) при неизменных напряжении сети U и токе возбуждения Iв. Для двигателя параллельного возбуждения эта зависимость выражается следующей формулой:
 ,
,
где Rд – добавочное сопротивление, включенное последовательно якорю.
 Механическая характеристика двигателя параллельного возбуждения без учёта размагничивающего действия реакции якоря представляет собой прямую (рис. 3). Частота вращения n0, соответствующая моменту M = 0 (Iя = 0) называется пограничной или частотой вращения идеального холостого хода. Наклон механической характеристики определяет степень зависимости частоты вращения от статического момента сопротивления. Если при изменении момента сопротивления частота вращения изменяется мало, то характеристика считается жёсткой.
Механическая характеристика двигателя параллельного возбуждения без учёта размагничивающего действия реакции якоря представляет собой прямую (рис. 3). Частота вращения n0, соответствующая моменту M = 0 (Iя = 0) называется пограничной или частотой вращения идеального холостого хода. Наклон механической характеристики определяет степень зависимости частоты вращения от статического момента сопротивления. Если при изменении момента сопротивления частота вращения изменяется мало, то характеристика считается жёсткой.
Механическая характеристика при отсутствии добавочного сопротивления в цепи якоря (Rд = 0) и номинальном напряжении UН называется естественной механической характеристикой. Механические характеристики при других условиях называются искусственными.
Механическая характеристика снимается следующим образом. Устанавливается номинальный режим (U = Uн, I = Iн, n = nн), затем двигатель разгружается. Ток возбуждения поддерживается неизменным. В процессе опыта измеряется частота вращения при различных значениях момента сопротивления.
На рис. 4 представлено семейство механических характеристик двигателя параллельного возбуждения для различных значений добавочного сопротивления Rд при неизменном напряжении сети и токе возбуждения Iв = const. Из рисунка видно, что одному и тому же статическому моменту сопротивления Мст при различных значениях Rд соответствуют различные значения частоты вращения двигателя. Таким образом, изменением сопротивления в цепи якоря можно регулировать частоту вращения.
 Процесс изменения частоты вращения двигателя при изменении сопротивления в цепи якоря протекает следующим образом. Предположим, что режим работы двигателя определяется точкой 1 на естественной (а) механической характеристике. Добавочное сопротивление Rд = 0. При моменте сопротивления, равном МСТ, двигатель вращается с частотой n1. В цепь якоря вводится добавочное сопротивление Rд1, которому соответствует искусственная (б) механическая характеристика. Так как вращающиеся части машины обладают инерцией, то при изменении сопротивления цепи якоря скорость вращения не может измениться мгновенно. Следовательно, в первый момент после изменения сопротивления сохранится частота вращения n1. Но при такой частоте вращения двигатель теперь развивает момент М2. Этот момент меньше статического момента сопротивления Mст. Вращение станет замедленным. Частота вращения будет понижаться до тех пор, пока вращающий момент, развиваемый двигателем, не станет равным моменту сопротивления. Равновесие будет достигнуто при частоте вращения n2, соответствующей точке 3 на характеристике (б). Если теперь уменьшить добавочное сопротивление до значения Rд2
Процесс изменения частоты вращения двигателя при изменении сопротивления в цепи якоря протекает следующим образом. Предположим, что режим работы двигателя определяется точкой 1 на естественной (а) механической характеристике. Добавочное сопротивление Rд = 0. При моменте сопротивления, равном МСТ, двигатель вращается с частотой n1. В цепь якоря вводится добавочное сопротивление Rд1, которому соответствует искусственная (б) механическая характеристика. Так как вращающиеся части машины обладают инерцией, то при изменении сопротивления цепи якоря скорость вращения не может измениться мгновенно. Следовательно, в первый момент после изменения сопротивления сохранится частота вращения n1. Но при такой частоте вращения двигатель теперь развивает момент М2. Этот момент меньше статического момента сопротивления Mст. Вращение станет замедленным. Частота вращения будет понижаться до тех пор, пока вращающий момент, развиваемый двигателем, не станет равным моменту сопротивления. Равновесие будет достигнуто при частоте вращения n2, соответствующей точке 3 на характеристике (б). Если теперь уменьшить добавочное сопротивление до значения Rд2 
Регулировать частоту вращения двигателя изменением сопротивления цепи якоря можно только в пределах от номинальной частоты вращения до нуля. Регулирование может быть плавным или ступенчатым. Регулировочный реостат, в отличие от пускового, должен рассчитываться на длительный режим работы.
Рассмотренный способ регулирования скорости вращения является неэкономичным, так как сопряжён со значительными потерями на добавочном сопротивлении.
Регулировать скорость вращения n двигателя параллельного возбуждения можно и изменением магнитного потока Ф. Семейство механических характеристик двигателя параллельного возбуждения для различных значений магнитного потока представлено на рис. 5. Пусть режим работы характеризуется точкой 1 естественной (а) механической характеристики. Моменту сопротивления МСТ соответствует частота вращения n1. Если теперь увеличить сопротивление реостата Rв в цепи возбуждения (рис. 2), то ток возбуждения Iв и магнитный поток Ф уменьшатся. Пусть новому значению потока соответствует искусственная механическая характеристика (б). При частоте вращения n1 двигатель будет развивать момент М2 (точка 2). Так как этот момент больше статического момента сопротивления, то вращение двигателя станет ускоренным. Частота вращения повысится до значения n2 (точка 3), при котором момент, развиваемый двигателем, будет равен моменту сопротивления.
 Так как в номинальном режиме магнитная система машины близка к насыщению, то регулирование частоты вращения изменением магнитного потока (полюсное регулирование) обычно ведётся только вверх от номинальной, то есть от n = nн до n = nmax. Максимальное значение частоты вращения ограничивается условиями коммутации и механической прочностью якоря и коллектора. Для двигателей нормального исполнения обычно допускается превышение частоты вращения на 20 % от номинальной.
Так как в номинальном режиме магнитная система машины близка к насыщению, то регулирование частоты вращения изменением магнитного потока (полюсное регулирование) обычно ведётся только вверх от номинальной, то есть от n = nн до n = nmax. Максимальное значение частоты вращения ограничивается условиями коммутации и механической прочностью якоря и коллектора. Для двигателей нормального исполнения обычно допускается превышение частоты вращения на 20 % от номинальной.
При полюсном регулировании необходимо помнить, что при неизменном моменте сопротивления уменьшение магнитного потока приводит к возрастанию тока якоря. При длительной работе ток якоря не должен превышать номинального Iя £ Iян. Полюсное регулирование двигателей параллельного возбуждения широко распространено. Этот способ регулирования прост и экономичен.
Рабочие характеристики дают представление о свойствах двигателя. Рабочими характеристиками называют зависимости потребляемой мощности P1, потребляемого тока I, частоты вращения n, момента М, тока якоря Iя и КПД h от мощности на валу двигателя P2 при неизменных напряжении U = const и токе возбуждения Iв = const. На рис. 6 представлены примерные графики этих зависимостей.
Для реверсирования двигателя необходимо изменить направление тока якоря, оставив неизменным направление магнитодвижущей силы (МДС) обмотки возбуждения, или изменить направление МДС обмотки возбуждения, оставив прежним направление тока в якорной обмотке.



