Посадочный модуль (космический корабль)
Посадочный модуль (космический корабль)



Посадочный модуль — космический аппарат, предназначенный для посадки на поверхности астрономического объекта. Частным случаем посадочного модуля может являться спускаемый аппарат — отделяющаяся часть другого космического аппарата.
Содержание
Модули для посадки на кометы и астероиды
В рамках программы космического аппарата «Розетта», стартовавшего 2 марта 2004 г, планируется высадка в 2014 г. посадочного модуля на комету 67P/Чурюмова-Герасименко. Из-за крайне слабой гравитации подобных тел, посадочный модуль оснащен гарпуном, который должен закрепить на поверхности трос, по которому потом притянется модуль.
Посадка на подобном малом теле, астероиде 433 Эрос, была проведена зондом NEAR Shumaker, несмотря на тот факт, что NEAR не разрабатывался для посадки.
Космический аппарат «Хаябуса» сделал несколько попыток посадки на астероид 25143 Итокава с переменным успехом, включая неудавшуюся высадку вездехода.
Зонд исследования плотных слоев атмосферы Юпитера
Космический аппарат «Галилео» сбросил небольшой зонд в плотные слои атмосферы Юпитера, но поскольку Юпитер — газовый гигант, у которого нет понятия поверхность, до сих пор идут споры о том, можно ли это называть посадкой.
Лунные посадочные модули
Исторический обзор
Большое количество Лунных посадочных модулей по советской программе «Луна» и американской «Рейнджер» садидись без управляемого спуска и не предусматривали передачу полезной информации после посадки.
Советский космический аппарат «Луна-9» был первым, совершившим мягкую посадку и передавшим фотоизображения на Землю. Американская программа «Сервейер» разрабатывалась для определения мест безопасной посадки космических кораблей серии «Аполлон». Поэтому необходима была мягкая посадка для взятия образцов грунта и определения толщины пылевого слоя, которая была неизвестна до Сервейеров.
Лунные спускаемые модули Аполлонов и Луноходов использовали ракетные тормозные системы для мягкой посадки астронавтов и везедеходов на поверхность Луны.
Что планируется
Космический корабль «Альтаир», прежде называвшийся «Lunar Surface Access Module» or «LSAM», планируется использовать в качестве посадочногоь модуля в проекте «Созвездие». Согласно плану проекта «Созвездие» НАСА планирует провести высадку на Луну где-то в 2020 г.
Посадочный модуль на Титан
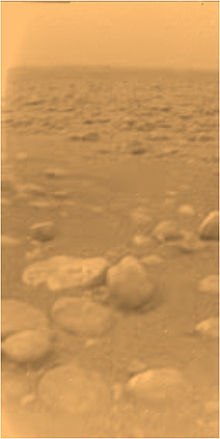
Зонд Гюйгенс, который нес на себе космический аппарат Кассини, специально был разработан для посадки как на твердую, так и на жидкую поверхность. Его тщательно тестировали, проводя тестовые сбросы, чтобы быть уверенным, что он сможет пережить посадку и функционировать по меньшей мере 3 минуты. Однако посадка оказалась не такой жесткой, как планировалось и зонд проработал более двух часов после посадки.
Посадочные модули для планет земного типа
Планеты земного типа часто являются целью миссий с использованием посадочных модулей. Пока не предпринималось попыток посадки на Меркурий, но Марс и Венера были исследованы.
Венера
Во время советской программы «Венера» использовалось много посадочных модулей. Часть посадок закончилась крушением модулей во время спуска, часть благополучно достигла поверхности. Во время советской программы «Вега» в атмосферы планеты были запущены два воздушниых шара.
Модуль «Марс-2» запущенный Советским Союзом был первым рукотворным объектом, достигшим поверхности Марса в 1973 г., однако связь с ним была потеряна через минуту после посадки. Причиной потери связи была самая крупная пылевая буря с начала астрономических наблюдений красной плантеты. Три других модуля, «Марс-3», «Марс-5» и «Марс-6» или потерпели крушение при посадке или вышли из строя еще до входа в атмосферу во время окна с 1973 по по 1975/76 г. Все четыре модуля были построены на базе модуля «Луна-9», дополнительно оборудованому теплозащитной скорлупой для защиты при входе в атмосферу.
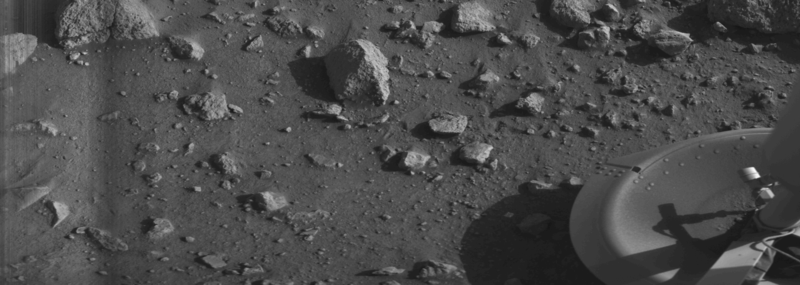
«Викинг-1» и «Викинг-2» были запущены соответственно в августе и сентябре 1975, каждый состоял из орбитального корабля и спускаемого модуля. «Викинг-1» приземлился в июле 1976, а «Викинг-2» в сентябре 1976. Программа Викингов закончилась в 1983 г., после того как оба аппарата перестали функционировать.
«Mars Pathfinder» был запущен в декабре 1996 и выпустил первый в истории планетоход на Марсе, названный «Sojourner», в июле 1997 г. В сентябре 1997 г. он перестал функционировать, вероятно в результате выхода из строя радиоэлектронного оборудования из-за низкой температуры.
Европейский модуль «Бигль-2» успешно отделился от космического корабля «Марс Экспресс», но сигнал подтверждающий посадку, который должен был поступить 25 декабря 2003 г. не был получен. По причине отсутствия связи «Бигль-2» 6 февраля 2004 г. был объявлен потерянным.

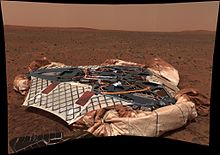
Исследовательские марсоходы «Спирит» и «Оппортьюнити» стартовали в июне и июле (соответственно) 2003 г. Они достигли марсианской поверхности в январе 2004 и использовали парашюты и надувные подушки для мягкого приземления. По состоянию на июнь 2008 оба вездехода функционировали, показывая удивительную живучесть более четырех лет, в то время как их запланированный срок жизни был 3 месяца.
Космический аппарат «Феникс» успешно произвел мягкую посадку на поверхности Марса 25 мая 2008, используя для снижения комбинацию ракетных двигателей и парашютов.
Посадочный модуль



Посадочный модуль — космический аппарат, предназначенный для посадки на поверхности астрономического объекта. Частным случаем посадочного модуля может являться спускаемый аппарат — отделяющаяся часть другого космического аппарата.
Содержание
Модули для посадки на кометы и астероиды
В рамках программы космического аппарата «Розетта», стартовавшего 2 марта 2004 г, планируется высадка в 2014 г. посадочного модуля на комету 67P/Чурюмова-Герасименко. Из-за крайне слабой гравитации подобных тел, посадочный модуль оснащен гарпуном, который должен закрепить на поверхности трос, по которому потом притянется модуль.
Посадка на подобном малом теле, астероиде 433 Эрос, была проведена зондом NEAR Shumaker, несмотря на тот факт, что NEAR не разрабатывался для посадки.
Космический аппарат «Хаябуса» сделал несколько попыток посадки на астероид 25143 Итокава с переменным успехом, включая неудавшуюся высадку вездехода.
Зонд исследования плотных слоев атмосферы Юпитера
Космический аппарат «Галилео» сбросил небольшой зонд в плотные слои атмосферы Юпитера, но поскольку Юпитер — газовый гигант, у которого нет понятия поверхность, до сих пор идут споры о том, можно ли это называть посадкой.
Лунные посадочные модули
Исторический обзор
Большое количество Лунных посадочных модулей по советской программе «Луна» и американской «Рейнджер» садились без управляемого спуска и не предусматривали передачу полезной информации после посадки.
Советский космический аппарат «Луна-9» был первым, совершившим мягкую посадку и передавшим фотоизображения на Землю. Американская программа «Сервейер» разрабатывалась для определения мест безопасной посадки космических кораблей серии «Аполлон». Поэтому необходима была мягкая посадка для взятия образцов грунта и определения толщины пылевого слоя, которая была неизвестна до Сервейеров.
Лунные спускаемые модули Аполлонов и Луноходов использовали ракетные тормозные системы для мягкой посадки астронавтов и везедеходов на поверхность Луны.
Что планируется
Космический корабль «Альтаир», прежде называвшийся «Lunar Surface Access Module» or «LSAM», планируется использовать в качестве посадочного модуля в проекте «Созвездие». Согласно плану проекта «Созвездие» НАСА планирует провести высадку на Луну где-то в 2020 г.
Посадочный модуль на Титан
Зонд Гюйгенс, который нес на себе космический аппарат Кассини, специально был разработан для посадки как на твердую, так и на жидкую поверхность. Его тщательно тестировали, проводя тестовые сбросы, чтобы быть уверенным, что он сможет пережить посадку и функционировать по меньшей мере 3 минуты. Однако посадка оказалась не такой жесткой, как планировалось и зонд проработал более двух часов после посадки.
Посадочные модули для планет земного типа
Венера
Во время советской программы «Венера» использовалось много посадочных модулей. Часть посадок закончилась крушением модулей во время спуска, часть благополучно достигла поверхности. Во время советской программы «Вега» в атмосферы планеты были запущены два воздушных шара.
Модуль «Марс-2» запущенный Советским Союзом был первым рукотворным объектом, достигшим поверхности Марса в 1973 г., однако связь с ним была потеряна через минуту после посадки. Причиной потери связи была самая крупная пылевая буря с начала астрономических наблюдений красной плантеты. Три других модуля, «Марс-3», «Марс-5» и «Марс-6» или потерпели крушение при посадке или вышли из строя еще до входа в атмосферу во время окна с 1973 по 1975/76 г. Все четыре модуля были построены на базе модуля «Луна-9», дополнительно оборудованому теплозащитной скорлупой для защиты при входе в атмосферу.
«Викинг-1» и «Викинг-2» были запущены соответственно в августе и сентябре 1975, каждый состоял из орбитального корабля и спускаемого модуля. «Викинг-1» приземлился в июле 1976, а «Викинг-2» в сентябре 1976. Программа Викингов закончилась в 1983 г., после того как оба аппарата перестали функционировать.
«Mars Pathfinder» был запущен в декабре 1996 и выпустил первый в истории планетоход на Марсе, названный «Sojourner», в июле 1997 г. В сентябре 1997 г. он перестал функционировать, вероятно в результате выхода из строя радиоэлектронного оборудования из-за низкой температуры.
Европейский модуль «Бигль-2» успешно отделился от космического корабля «Марс Экспресс», но сигнал подтверждающий посадку, который должен был поступить 25 декабря 2003 г. не был получен. По причине отсутствия связи «Бигль-2» 6 февраля 2004 г. был объявлен потерянным.

Исследовательские марсоходы «Спирит» и «Оппортьюнити» стартовали в июне и июле (соответственно) 2003 г. Они достигли марсианской поверхности в январе 2004 и использовали парашюты и надувные подушки для мягкого приземления. По состоянию на июнь 2008 оба вездехода функционировали, показывая удивительную живучесть более четырех лет, в то время как их запланированный срок жизни был 3 месяца.
Космический аппарат «Феникс» успешно произвел мягкую посадку на поверхности Марса 25 мая 2008, используя для снижения комбинацию ракетных двигателей и парашютов.
Лунный модуль
Из Википедии — свободной энциклопедии

Лунный модуль корабля «Аполлон» (LM, также известный как LEM (Lunar Excursion Module), — посадочный модуль, часть корабля «Аполлон», построенный для американской программы «Аполлон» компанией Grumman Corporation для экипажа из двух человек с целью доставки с лунной орбиты на поверхность Луны и обратно. Шесть таких модулей совершили успешную посадку на Луну в 1969—1972 годах.
В каком-то смысле это был первый в мире истинно космический корабль, поскольку он был способен перемещаться только в космосе, не был конструктивно и аэродинамически приспособлен к полёту в атмосфере Земли.
Его разработка сталкивалась с несколькими препятствиями, что задержало его первый беспилотный полёт на срок около десяти месяцев, а его первый пилотируемый полёт примерно на три месяца. Несмотря на это, в конце концов данный модуль стал самым надёжным компонентом системы «Аполлон»/«Сатурн» и значительно превышал её проектные требования, что было задействовано для поддержания жизнеобеспечения и двигательных ресурсов, позволив спасти астронавтов после взрыва и отказа систем служебного модуля в полёте «Аполлона-13».
Модуль состоит из двух ступеней. Посадочная ступень, оборудованная самостоятельной двигательной установкой и шасси, используется для снижения лунного корабля с орбиты Луны и мягкой посадки на лунную поверхность, и также служит стартовой площадкой для взлётной ступени. Взлётная ступень, с герметичной кабиной для экипажа и самостоятельной двигательной установкой, после завершения исследований стартует с поверхности Луны и на орбите стыкуется с командным отсеком. Разделение ступеней осуществляется при помощи пиротехнических устройств.
Для тренировки экипажа по ручному управлению модулем был разработан тренажёр, способный на Земле создать условия пребывания в поле тяготения Луны.


СОДЕРЖАНИЕ
Landers
Лунный


В 1966 году советская « Луна-9» стала первым космическим кораблем, совершившим мягкую посадку на Луну и передавшим фотографические данные на Землю. Программа American Surveyor (1966–1968) была разработана, чтобы определить, где Apollo может безопасно приземлиться. В результате эти роботизированные миссии требовали, чтобы мягкие спускаемые аппараты отбирали лунный грунт и определяли толщину слоя пыли, которая была неизвестна Surveyor.
Лунные модули Аполлона (1969–1972) с экипажем из США с марсоходами (1971–1972) и позднесоветские большие роботизированные посадочные устройства (1969–1969), Луноходы (1970–1973) и миссии по возврату образцов (1970–1976) использовали ракетный спускаемый двигатель. для мягкой посадки космонавтов и луноходов на Луну.
У России есть планы на миссию Luna-Grunt, чтобы вернуть образцы с Луны к 2021 году.
Венера
Советский Союз планировал тяжелую миссию Marsokhod Mars 4NM в 1973 году и миссию Mars 5NM с возвращением образцов на Марс в 1975 году, но ни то, ни другое не произошло из-за необходимости в супер-пусковой установке N1, которая так и не была успешно запущена. Двойной запуск советской миссии по возврату образцов » Марс 5М» (Марс-79) планировался на 1979 год, но был отменен из-за сложности и технических проблем.
Марс 96 был первой сложной постсоветской российской миссией с орбитальным аппаратом, посадочным модулем и пенетраторами. Запланированный на 1996 год, он провалился при запуске. Запланированное повторение этой миссии, Марс 98, было отменено из-за отсутствия финансирования.
Посадочный модуль European Beagle 2 успешно развернулся с космического корабля Mars Express, но сигнала, подтверждающего посадку, которая должна была произойти 25 декабря 2003 года, получено не было. Связь так и не была установлена, и 6 февраля 2004 года « Бигл-2» был объявлен потерянным. Предложенная в 2009 г. миссия посадочного модуля « Бигль-3 » по поиску жизни, прошлого или настоящего, не была принята.
Американские марсоходы Mars Exploration Rovers Spirit и Opportunity были запущены в июне и июле 2003 года. Они достигли поверхности Марса в январе 2004 года с помощью спускаемых аппаратов с подушками безопасности и парашютами для смягчения ударов. Spirit прекратил работу в 2010 году, более чем на пять лет после расчетного срока службы. По состоянию на 13 февраля 2017 года Opportunity был объявлен практически мертвым, так как его трехмесячный проектный срок службы превысил более чем на десять лет.
Американский космический корабль « Феникс» 25 мая 2008 года успешно приземлился на поверхность Марса с использованием парашютов и ракетных двигателей.
Китай запустил миссию Tianwen-1 23 июля 2020 года. В ее состав входят орбитальный аппарат, посадочный модуль и 240-килограммовый вездеход. Орбитальный аппарат был выведен на орбиту 10 февраля 2021 года. Чжуронг успешно приземлился 14 мая 2021 года, был развернут 22 мая 2021 года и сбросил удаленную камеру на Марс 1 июня 2021 года.
Исследование Марса, в том числе с помощью спускаемых аппаратов, продолжается и по сей день. Среди них Россия запланировала миссию по возвращению образцов с Марса Mars-Grunt примерно на 2026 год.

Марсианские луны
Exploration Японское агентство аэрокосмических (JAXA) планирует запустить Марсианский Спутники Exploration миссии (MMX) в 2024 году, образец возвращения миссии ориентации Фобоса. MMX будет приземляться и собирать образцы с Фобоса несколько раз, а также развернет марсоход, совместно разработанный CNES и Немецким аэрокосмическим центром (DLR). Используя механизм отбора проб, космический аппарат стремится получить минимум 10 г проб. MMX вернется на Землю в 2029 году.
Россия планирует повторить миссию Фобос-Грунт примерно в 2024 году.
Титан
В рамках предлагаемой американской миссии Titan Mare Explorer (TiME) рассматривался спускаемый аппарат, который будет приводиться в воду в озере в северном полушарии Титана и плавать на поверхности озера в течение нескольких месяцев. Предлагаемая в Испании миссия с двигателем для отбора проб на озере Титан (TALISE) аналогична спускаемому аппарату TiME, но имеет собственную силовую установку для управления судоходством.
Кометы и астероиды
Отмененная миссия НАСА » Рандеву кометы и облет астероида» рассматривала запуск в 1995 году и посадку пенетраторов на ядро кометы в 2001 году.
Первая посадка на небольшое тело Солнечной системы (объект в Солнечной системе, который не является луной, планетой или карликовой планетой) была совершена в 2001 году зондом NEAR Shoemaker на астероиде 433 Эрос, несмотря на то, что NEAR изначально не проектировался. быть способным приземлиться.
Япония ( JAXA ) запустила космический зонд на астероиде Hayabusa2 в 2014 году, чтобы доставить несколько частей для посадки (включая посадочные устройства Minerva II и German Mobile Asteroid Surface Scout (MASCOT) и пенетратор Small Carry-on Impactor (SCI)) в 2018–2019 годах для возврата образцов на Землю к 2020 году.
Меркурий
Спутники Юпитера

Несколько зондов Юпитера предоставляют множество изображений и других данных о его спутниках. Некоторые предложенные миссии с посадкой на спутники Юпитера были отменены или не приняты. Небольшой посадочный модуль Europa с ядерной установкой был предложен в рамках миссии NASA Jupiter Icy Moons Orbiter (JIMO), которая была отменена в 2006 году.
Импакторы

Глубокий космос 2
Существенное воздействие
Зонд лунного удара
LCROSS
МЕССЕНДЖЕР
Миссия НАСА MESSENGER (поверхность Меркурия, космическая среда, геохимия и дальность) к Меркурию стартовала 3 августа 2004 года и вышла на орбиту вокруг планеты 18 марта 2011 года. После картографической миссии MESSENGER получил указание столкнуться с поверхностью Меркурия 30 апреля 2015 года. Столкновение космического корабля с Меркурием произошло около 15:26 по восточному времени 30 апреля 2015 года, в результате чего образовался кратер диаметром 16 м.
Спускаемый аппарат

Спуска́емый аппара́т (СА) — космический аппарат, предназначенный для спуска людей, подопытных животных и/или аппаратуры с околопланетной орбиты или с межпланетной траектории и мягкой посадки на поверхность планеты. СА входит в состав космического аппарата, совершающего орбитальный или межпланетный космический полёт (например, орбитального аппарата или орбитальной станции, от которого СА отделяется перед спуском.
Содержание
Главная техническая проблема мягкой посадки состоит в том, чтобы уменьшить скорость движения аппарата от космической (иногда, десятки километров в секунду) практически до нуля. Эта проблема решается разными способами, причём часто для одного и того же аппарата на разных участках спуска используются разные способы.
Спуск с помощью ракетного двигателя
Также применяется термин «моторная посадка». Для обеспечения торможения и спуска этот способ требует наличия на борту аппарата примерно такого же запаса топлива, как для вывода на орбиту этого аппарата с поверхности планеты. Поэтому этот способ используется на всей траектории спуска (как единственно возможный) лишь при посадке на поверхность небесного тела, лишённого атмосферы, (например, Луны). При наличии на планете атмосферы ракетные двигатели используются только на начальной стадии спуска — для перехода с космической орбиты (траектории) на траекторию спуска, до входа в атмосферу, а также на заключительном этапе, перед самым касанием поверхости, для гашения остаточной скорости падения.
Аэродинамическое торможение

При быстром движении аппарата в атмосфере возникает сила сопротивления среды — аэродинамическая, которая используется для его торможения.
Поскольку аэродинамическое торможение не требует затрат топлива, этот способ используется всегда при спуске на планету, обладающую атмосферой. При аэродинамическом торможении кинетическая энергия аппарата превращается в тепло, сообщаемое воздуху и поверхности аппарата. Общее количество тепла, выделяемого, например, при аэродинамическом спуске с околоземной орбиты составляет свыше 30 мегаджоулей в расчёте на 1 кг массы аппарата. Бо́льшая часть этой теплоты уносится потоком воздуха, но и лобовая поверхность СА может нагреваться до температуры в несколько тысяч градусов, поэтому он должен иметь соответствующую тепловую защиту.
Аэродинамическое торможение особенно эффективно на сверхзвуковых скоростях, поэтому используется для торможения от космических до скоростей порядка сотен м/с. На более низких скоростях используются парашюты.
Возможны разные траектории снижения аппарата при аэродинамическом торможении. Рассматриваются обычно два случая: баллистический спуск и планирование.
Баллистический спуск
При баллистическом спуске вектор равнодействующей аэродинамических сил направлен прямо противоположно вектору скорости движения аппарата. Спуск по баллистической траектории не требует управления.
Недостатком этого способа является большая крутизна траектории, и, как следствие, вхождение аппарата в плотные слои атмосферы на большой скорости, что приводит к сильному аэродинамическому нагреву аппарата и к перегрузкам, иногда превышающим 10g — близким к предельно-допустимым значениям для человека.
Планирование

Альтернативой баллистическому спуску является планирование. Внешний корпус аппарата в этом случае имеет, как правило, коническую форму, причём ось конуса составляет некоторый угол (угол атаки) с вектором скорости аппарата, за счёт чего равнодействующая аэродинамических сил имеет составляющую, перпендикулярную к вектору скорости аппарата — подъёмную силу. Благодаря подъёмной силе, аппарат снижается медленнее, траектория его спуска становится более пологой, при этом участок торможения растягивается и по длине и во времени, а максимальные перегрузки и интенсивность аэродинамического нагрева могут быть снижены в несколько раз, по сравнению с баллистическим торможением, что делает планирующий спуск для людей более безопасным и комфортным.
Угол атаки при спуске меняется в зависимости от скорости полёта и текущей плотности воздуха. В верхних, разреженных слоях атмосферы он может достигать 40°, постепенно уменьшаясь со снижением аппарата. Это требует наличия на СА системы управления планирующим полётом, что усложняет и утяжеляет аппарат, и в случаях, когда он служит для спуска только аппаратуры, которая способна выдерживать более высокие перегрузки, чем человек, используется, как правило, баллистическое торможение.
Орбитер космического «челнока» Спейс Шаттл, при возврате на Землю выполняющий функцию спускаемого аппарата, планирует на всём участке спуска от входа в атмосферу до касания шасси посадочной полосы, после чего выпускается тормозной парашют.



