Характеристики датчиков.
Датчик должен воспроизводить физическую величину максимально быстро и точно. Хотя чаще всего датчик выбирают исходя из надежности и удобства обслуживания, его точность, стабильность и повторяемость результатов остаются важнейшими факторами. Основой работы управляющего компьютера является входная информация, поэтому точные и надежные измерения — это необходимое условие качества управления.
Большая часть характеристик датчика, которые приводятся в техническом описании, — статические параметры. Эти параметры не показывают, насколько быстро и точно датчик может измерить сигнал, изменяющийся с большой скоростью. Свойства, отражающие работу датчика в условиях изменяющихся входных воздействий, называются динамическими характеристиками. Они существенно влияют на работу системы управления. Идеальный датчик мгновенно реагирует на изменение измеряемой физической величины. На практике любому датчику необходимо некоторое время на отработку нового входного сигнала. Очевидно, что для адекватного отображения реальных изменений наблюдаемой величины время реакции датчика должно быть как можно меньше. Это тот же самый принцип, который применяется ко всей системе управления (компьютеру) процессом реального времени в целом: временные характеристики физического процесса определяют быстродействие системы (производительность компьютера). Однако чаще требуется компромисс между скоростью реакции датчика и его чувствительностью к шуму.
Рассматривая датчики используемые СаиУ необходимо знать характеристики определяющие особенности их работы, при этом различают статические и динамические характеристики, кроме них для датчиков характерны такие параметры, как:
— погрешность (ошибка) измерения.
Точность датчика определяет разницу между измеренной и действительной величиной; она может быть отнесена к датчику в целом или к конкретному его показанию. Точность датчика зависит не только от его аппаратной части, но и от остальных элементов измерительного комплекса.
Погрешность (ошибка) измерения определяется как разница между измеренной и действительной величинами.
Ошибки измерения можно классифицировать и, соответственно, моделировать как детерминированные (или систематические) и случайные (или стохастические). Детерминированные ошибки связаны с неисправностью датчика, нарушением условий его применения или процедуры измерений. Эти ошибки повторяются при каждом измерении. Типичная систематическая ошибка — это смещение показаний или сдвиг. В принципе, систематические ошибки устраняются при поверках. Случайные ошибки имеют самое разное происхождение. В большинстве случаев — это влияние окружающей среды (температуры, влажности, электрических наводок и т. п.). Если причины случайных ошибок известны, то эти ошибки можно компенсировать. Часто влияние возмущений характеризуют количественно такими параметрами, как средняя ошибка, среднеквадратичная ошибка или стандартное отклонениеи разброс либо погрешность.
Динамические характеристики датчиков
Динамические свойства датчика характеризуются целым рядом параметров, которые, однако, довольно редко приводятся в технических описаниях производителей. Динамическую характеристику датчика можно экспериментально получить как реакцию на скачок измеряемой входной величины (рис.2.5).
 |
Параметры, описывающие реакцию датчика, дают представление о его скорости (например, время нарастания, запаздывание, время достижения первого максимума), инерционных свойствах (относительное перерегулирование, время установления) и точности (смещение).
В принципе следует стремиться к минимизации следующих параметров.
· Время прохождения зоны нечувствительности— время между началом изменения физической величины и моментом реакции датчика, т. е. моментом начала изменения выходного сигнала.
· Запаздывание— время, через которое показания датчика первый раз достигают 50 % установившегося значения. В литературе встречаются и другие определения запаздывания.
· Время нарастания— время, за которое выходной сигнал увеличивается от 10 до 90 % установившегося значения. Другое определение времени нарастания — величина, обратная наклону кривой реакции датчика на скачок измеряемой величины в момент достижения 50 % от установившегося значения, умноженная на установившееся значение. Иногда используются другие определения. Малое время нарастания всегда указывает на быструю реакцию.
· Время достижения первого максимума— время достижения первого максимума выходного сигнала (перерегулирования).
· Время переходного процесса, время установления— время, начиная с которого отклонение выхода датчика от установившегося значения становится меньше заданной величины (например, ± 5 %).
· Относительное перерегулирование — разность между максимальным и установившимся значениями, отнесенная к установившемуся значению (в процентах).
· Статическая ошибка — отклонение выходной величины датчика от истинного значения или смещение. Может быть устранена калибровкой датчика.
В реальных условиях некоторые требования к датчикам всегда противоречат друг другу, поэтому все параметры нельзя минимизировать одновременно.
Статические характеристики датчиков
Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение. Важными статическими параметрами являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, рабочий диапазон, повторяемость и воспроизводимость результата.
• Чувствительностьдатчика определяется как отношение величины
выходного сигнала к единичной входной величине (для тонких измерительных технологий определение чувствительности может быть более сложным).
•Разрешение — это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком.
•Линейностьне описывается аналитически, а определяется исходя из
градуировочной кривой датчика. Статическая градуировочная кривая показывает зависимость выходного сигнала от входного при стационарных условиях. Близость этой кривой к прямой линии и определяет степень линейности. Максимальное отклонение от линейной зависимости выражается в процентах.
•Статическое усилениеили усиление по постоянному току
— это коэффициент усиления датчика на очень низких частотах. Большой коэффициент усиления соответствует высокой чувствительности измерительного устройства.
•Дрейфопределяется как отклонение показаний датчика, когда измеряемая
величина остается постоянной в течение длительного времени. Величина дрейфа
может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала. При проверке дрейфа нуля измеряемая величина поддерживается на нулевом уровне или уровне, который соответствует нулевому выходному сигналу, а проверка дрейфа на максимуме выполняется при значении измеряемой величины, соответствующем верхнему пределу рабочего диапазона » датчика. Дрейф датчика вызывается нестабильностью усилителя, изменением окружающих условий (например, температуры, давления, влажности или уровня вибраций), параметров электроснабжения или самого датчика (старение, выработка ресурса, нелинейность и т. д.).
• Рабочий диапазондатчика определяется допустимыми верхним
и нижним пределами значения входной величины или уровня выходного сигнала.
• Повторяемостьхарактеризуется как отклонение между несколькими
последовательными измерениями при заданном значении измеряемой величины в одинаковых условиях, в частности приближение к заданному значению должно происходить всегда и либо как нарастание, либо как убывание. Измерения должны быть выполнены за такой промежуток времени, чтобы не проявлялось влияние дрейфа. Повторяемость обычно выражается в процентах от рабочего диапазона.
• Воспроизводимостьаналогична повторяемости, но требует большего интервала между измерениями. Между проверками на воспроизводимость датчик должен использоваться по назначению и, более того, может быть подвергнут калибровке. Воспроизводимость задается в виде процентов от рабочего диапазона, отнесенных к единице времени (например, месяцу).
Статическая характеристика датчика и вытекающие функциональные показатели
Характеристика передачи
Идеальная или теоретическая зависимость ‘вход – выход’ существует для любого датчика. Если датчик идеально спроектирован и изготовлен идеальным рабочим из идеальных материалов с использованием идеальных инструментов, выходной сигнал такого датчика отображает истинное значение входного воздействия.
Идеальная (теоретическая) зависимость между входом и выходом любого устройства, отображающая состояние установившегося режима, называется функцией передачи устройства, или его статической характеристикой. Функция передачи может быть представлена в виде таблицы значений, графика или математического выражения.
Для датчика эта функция устанавливает зависимость между генерируемым датчиком электрическим сигналом, S, и измеряемым параметром, воздействием s:
S определяется одним из параметров выходного электрического сигнала, тем, что используется устройством сбора данных в качестве выхода датчика. В зависимости от особенностей датчика это могут быть амплитуда, или частота, или фаза…
Функция передачи (статическая характеристика) может быть простой линейной зависимостью или нелинейной функцией.
Одномерная линейная взаимосвязь описывается уравнением:
Реже используется полиномиальная аппроксимация более высокого порядка.
Для нелинейной статической характеристики чувствительность bне имеет постоянного значения, как для линейной зависимости (3.1). Здесь для любого конкретного входного значения, s0, чувствительность может быть определена как
Во многих случаях, нелинейный датчик может рассматриваться как линейный в ограни-ченном диапазоне. В широком диапазоне нелинейная статическая характеристика может быть аппроксимирована несколькими отрезками прямых (кусочно-линейная аппроксима-ция). Возможное отличие фактической характеристики от линейной модели оценивают специальными границами, в рамках которых задан уровень разрешенной (паспортной) погрешности (см. далее).
Диапазон измерения (диапазон входных воздействий полной шкалы)
Динамический диапазон воздействий, которые могут быть преобразованы датчиком, называется рабочим диапазоном или диапазоном полной шкалы – ПШ (FS на рис.3.1 ).
Децибелы. Для датчиков с очень большим диапазоном измерения и нелинейной характеристикой передачи динамический диапазон входных сигналов часто выражается в децибелах, которые являются логарифмической мерой отношения либо мощности, либо напряжения (силы). Следует подчеркнуть, что децибелами измеряются именно отношения, а не абсолютные значения. По определению, децибелы находятся вычислени-ем 10-кратного десятичного логарифма отношения мощностей:
В практике измерений децибелы ещё чаще определяют через отношение не мощностей, а сил, токов, или напряжений
Упражнение для самопроверки: Заполните столбцы таблицы, относящиеся к приведенному значению дБ:
| Отношение мощностей | |
| Отношение напряжений | |
| Децибелы, дБ | 0.1 1.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0 90.0 100.0 |
Выходной сигнал полной шкалы
Выходной сигнал полной шкалы (СПШ) – это алгебраическая разность между выходными электрическими сигналами, измеренными для максимального и минимального входных воздействий.
Например, на рис. 3.2,A СПШ представлен значением SFS, а погрешность приведена к единице входной величины. Из рисунка следует, что данное выше определение СПШ включает и возможные отклонения от идеальной статической характеристики, допустимые для данного датчика.
2. Показатели точности статического режима. Основные виды погрешностей
Термин“точность” применительно к характеристике датчика на самом деле означает НЕточность, или погрешность, которая является важнейшей его характеристикой.
Погрешность обычно оценивается наибольшим отклонением параметра, представляемо-го датчиком, от идеального, или истинного значения. Такое отклонение определяют как разницу между значением входного воздействия, пересчитанным из измеренного выходного напряжения, и фактическим значением воздействия.

(A) (Б)
Рис. 3.2. Функция передачи и возможные погрешности обобщенного датчика
На рис 3.2,А допустимая погрешность представлена коридором +–дельта заглавная
Можно привести пример, в котором задействован некий датчик линейных переме-щений.
. Если повторять эксперимент раз за разом и считать, что в эксперименте отсутствуют случайные ошибки, но фиксируемая ошибка каждый раз имеет место и равна 0,5 мм, можно говорить о том, что данный датчик имеет систематическую погрешность 0,5 мм
в диапазоне 10 мм. В реальной практике всегда присутствует элемент случайности, поэтому систематическая ошибка обычно представлена своими средним либо средне-квадратическим значениями.
На рис. 3.2,A показана идеальная, или теоретическая статическая характеристика. Однако, любой датчик выполняет свою функцию не вполне точно по многим причинам… Все реальные, или измеренные характеристики должны укладываться в гарантированные границы паспортной точности.
Например, (см. анализ точки Z на рис. 3.2,А).
Приводимые в паспорте значения погрешности датчика отражают суммарный эффект, включающий возможные отклонения показаний от образца к образцу, гистерезис, зоны нечувствительности и насыщения, а также погрешности калибровки и повторяемости. Паспортные значения точностных границ даются для худшего из возможных образцов с тем, чтобы в самой неблагоприятной ситуации гарантировать при применении данного типа датчика получение заданных показателей системы в целом.
Значения погрешности датчика можно представить в различных формах:
1. Непосредственно в единицах измеряемой величины (+–дельта)
2. В процентах от диапазона измерения (%ПШ)
3. В единицах параметра выходного сигнала.
Пример: пьезорезистивный датчик давления имеет диапазон измерения 100 кПа и значение выхода полной шкалы 10 Ом. Его погрешность может быть указана как +– 0.5%, +– 500 ПА, или +– 0.05 Oм..
Калибровка
Если допустимая производителем погрешность датчика шире допуска на точность системы в целом, можно воспользоваться калибровкой имеющегося в распоряжении датчика.
Предположим, нам нужно измерять температуру с точностью +–0.5◦C, а доступен датчик, имеющий погрешность +– 1◦C. Означает ли это, что такой датчик не может быть использован в системе? Нет, для калиброванного датчика допустимый диапазон погреш-ности сужается (рис 3.2Б).
В процессе калибровки на основании нескольких калибровочных измерений (число зависит от степени сложности принятой модели датчика) определяются параметры модели имеющегося датчика, т.е. находится его фактическая статическая характеристика, после чего делается вывод о возможности использования в рассматриваемой системе.
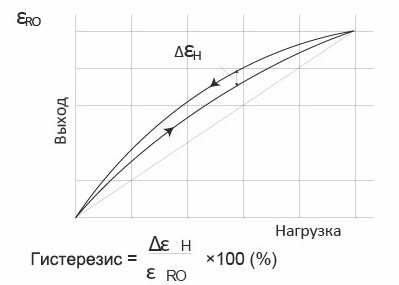
 Рис. 3.3. Статическая характеристика с гистерезисом Рис. 3.3. Статическая характеристика с гистерезисом |  Рис. 3.4. Статическая характеристика с насыщением Рис. 3.4. Статическая характеристика с насыщением |
Насыщение
Если в рабочем диапазоне датчика имеется участок, когда увеличение воздействия не приводит к пропорциональному изменению выходного сигнала, датчик проявляет одну из форм нелинейности – нелинейность конца шкалы, или насыщение (рис. 3.4).
Нелинейность
Погрешность нелинейности обычно указывается для датчиков, статическая характеристика которых может быть аппроксимирована прямой линией (3.1); она характеризуется максимальным отклонением (L) фактической характеристики от аппроксимирующей её прямой.

(А) (Б)
Рис. 3.5. Линейные приближения для нелинейной функции передачи
На рис.3.5,А аппроксимация выполнена: 1- методом секущей по двум крайним точкам диапазона; 2 – методом наименьших квадратов; 3 – методом касательной.
Повторяемость (воспроизводимость результатов)
Рассматриваемый вид погрешности относится к неспособности датчика повторить результаты в одних и тех же условиях. Погрешность воспроизводимости определяют по максимальной разнице между показаниями, полученными в двух разных калибровочных циклах (рис. 3.6).

Рис. 3.6. Погрешность повторяемости и зона нечувствительности
Погрешность воспроизводимости обычно представляют в виде % FS – процентов от полной шкалы. Возможные источники данной погрешности: тепловой шум, накопление заряда, пластичность материала и т.д..
Зона нечувствительности
Разрешение, разрешающая способность
Разрешением, или разрешающей способностью называют наименьшее изменениевходного воздействия, которое может надежно зафиксировать датчик (т.е. воспринять изменение так, чтобы на выходе получился новый по сравнению с предыдущим результат)
“Не чувствовать” очень малые изменения воздействия характерно, например, для прово-лочного потенциометрического преобразователя… Или для инфракрасного детектора присутствия (обнаруживает посторонние объекты), построенного с применением сеточной (с отверстиями) маски. А также для ряда других датчиков, где изменения выходного сигнала наблюдаются только тогда, когда изменяющееся воздействие делает шаг определенной длины. Типичный пример датчика с фиксированным разрешением – цифровой датчик, где цифровой формат (числа) в принципе предполагает ступенчатость представления информации, и одна ступень задает минимально возможное значение измерения.
Как формулируется в паспортных данных характеристика разрешения?
Например, для детектора присутствия с маской это может быть определено следующим образом: “разрешение детектора – обнаруживаемое эквидистантное перемещение объекта на расстоянии 5 метров составляет 20 см.”
3. Электрические характеристики
Выходной импеданс (выходное сопротивление)
Выходной импеданс датчика Zout важно знать для того, чтобы обеспечить наилучшее согласование датчика с интерфейсной электронной схемой, к которой он подсоединен. Выходное сопротивление (импеданс датчика Zout) может быть включено с входным сопротивлением интерфейса Zin либо последовательно (подключение в виде источника напряжения), либо параллельно с ним (токовое соединение). На рис. 2.8 показаны эти два подключения.

(A) (Б)
Рис. 3.7. Подключение датчиков к цепи интерфейса: датчик имеет выход в виде напряжения (A); датчик имеет токовый выход (Б).
Чтобы свести к минимуму искажения выходного сигнала, датчик с токовым выходом (Б) должен иметь как можно более высокое выходное сопротивление, а входной импеданс интерфейса желательно иметь низким. Для датчиков с выходным сигналом в виде напряжения, наоборот, выходное сопротивление датчика должно быть как можно меньше по сравнению с входным сопротивлением устройства обработки.
Датчики: общее описание и терминология

Компания TML является одной из немногих компаний (помимо таких как HBM, Kyowa), производящих свои тензометрические датчики на основе тензорезисторов собственного производства. Этим обусловлено высочайшее качество изделий. Линейка производимых тензометрических датчиков достаточно обширна. это и датчики силы, веса, перемещения, крутящего момента, давления, акселерометры, инклинометры, специализированные датчики для строительного мониторинга, для испытаний автотранспорта и т.п. Каждый из них в свою очередь разделяется по критериям диапазона использования, номинальным значениям, точности и т.д. В связи с этим, иногда, с подбором необходимого датчика возникают сложности, особенно по причине применения различной терминологии при описании характеристик датчиков. Разрешению вопроса различий в применяемой терминологии и посвящен данный раздел.
Общее описание
Компания TML уже более полувека способствует мировому развитию и продвижению тензометрической продукции, имеющей огромное значение для исследований, разработок и конструирования всевозможных измерительных систем. На базе технологических ноу-хау в тензометрии и научно-исследовательских разработок компанией TML налажено производство широкой гаммы всевозможных датчиков – начиная от стандартных и специализированных тензорезисторов, и заканчивая первичными преобразователями веса, ускорения, крутящего момента, деформации, перемещения, давления, уровня, температуры и др. Для комплексного решения задач измерения и анализа, компания предлагает широкую линейку вторичных преобразователей и электронных компонентов: различные регистрирующие устройства, вторичные преобразователи, измерительные усилители, многоканальные коммутаторы, цифровые индикаторы, блоки для радиотелеметрической передачи данных, приборы с высоким быстродействием для регистрации данных в динамике. Наряду с развитием измерительной электроники специалисты компании совершенствуют и палитру программного обеспечения, помогающего производить не только регистрацию данных, но и обеспечивать их визуализацию, обработку и оперативный анализ. Речь в этой статье пойдет про датчики производства TML: их общее описание и используемую терминологию.
Мостовая схема датчика и способ подключения
Мостовая схема датчика и способ подключения приведены ниже, она неприменима к некоторым продуктам.
Если требуется специализированный разъем, об этом необходимо указать в заказе.
Входное/выходное сопротивление датчика
| Сопротивление вход-выход (Ом) | Расположение контактов в разъеме и сопротивление между проводами (Ом) | |||||
|---|---|---|---|---|---|---|
| A-C Кр-Чер | B-D Зел-Бел | A-B Кр-Зел | A-D Кр-Бел | B-C Зел-Чер | C-D Чер-Бел | |
| 120 | 120 | 120 | 90 | 90 | 90 | 90 |
| 350 | 350 | 350 | 263 | 263 | 263 | 263 |
Измерения методом постоянного напряжения и методом постоянного тока
Метод постоянного напряжения
В этом методе напряжение питания моста (напряжение между контактами А и С тензометрического оборудования) сохраняется постоянным. В нашем оборудовании обычно используется этот метод, а наши датчики этим методом чаще калибруются. При удлинении провода, подсоединенного к датчику, необходима корректировка чувствительности (калибровочного коэффициента) датчика.
Метод постоянного тока
В этом методе ток питания моста (ток, идущий между контактами А и С тензометрического оборудования) сохраняется постоянным. Преимущество этого метода в том, что показания датчика не падают даже при удлинении провода датчика. Однако, сопротивление датчика на входе/выходе должно иметь определенную величину (обычно 120 или 350 Ом). Кроме того, чувствительность (калибровочный коэффициент) датчика для методов постоянного напряжения и постоянного тока может отличаться.
Выходной сигнал и величина деформации
Выходной сигнал (номинальное значение) датчика выражается в мВ/В. Это выходное напряжение при максимальной нагрузке на датчик. Оно показывает выходное напряжение, когда подается напряжение 1 В.
Пример:
1.5 мВ/В означает, что на выходе 1.5 мВ при максимально допустимой нагрузке на датчик, при этом на мост подается питание 1 В. Если на мост подается 2 В, то:
1,5 мВ/В x 2 В = 3 мВ
Таким образом, если коэффициент тензочувствительности равен 2.00, то выходное напряжение датчика 3 мВ, а на тензометрическом оборудовании должно отображаться значение, которое можно посчитать по следующей формуле:
Δe = E/4 × K×ɛ ɛ = 4Δe/KE
где Δe: Выходное напряжение датчика
E : Входное напряжение возбуждения
K : Коэффициент тензочувствительности
ɛ : Показание на тензометрическом оборудовании
При K, E и Δe равных 2.00, 2 В, и 3 мВ соответственно, и, учитывая, что 3 мВ = 0,003 В, получим:
При коэффициенте тензочувствительности тензометрического оборудования равном 2,00 и входном напряжении 1 В получим для выходного напряжения следующее:
Пониженная чувствительность из-за длины провода, присоединенного к датчику
Удельное сопротивление провода, подсоединенного к датчику
| Площадь сечения (кв. мм) | Общее удельное сопротивление (Ом/м) |
|---|---|
| 0.005 | 7.2 |
| 0.05 | 0.63 |
| 0.08 | 0.44 |
| 0.09 | 0.4 |
| 0.14 | 0.25 |
| 0.3 | 0.12 |
| 0.35 | 0.11 |
| 0.5 | 0.07 |
| 0.75 | 0.048 |
Поддержка TEDS
Аббревиатура TEDS означает электронную техническую спецификацию датчика. TEDS-совместимый датчик имеет информацию о сенсоре, соответствующую IEEE1451.4 по внутренним электронным данным. Это позволяет автоматический ввод в измерительный прибор информации о сенсоре, включающий чувствительность и серийный номер. Такая автоматизация позволяет избежать неверных настроек, значительно снижает время для настройки и делает работу более эффективной и простой. Для более детального описания TEDS-совместимых датчиков и измерительных приборов можете связаться с нами.
Терминология