Встроенные электродвигатели и электродвигатели специальных конструкций
Органическое слияние электрической и механической частей станка — основная тенденция современного станкостроения — приводит к тому, что в современных станках механическое и электрическое оборудование настолько тесно связано друг с другом, что иногда почти невозможно различить, где кончается электрооборудование и начинается механическая часть станка.
Для станкостроения создан ряд электродвигателей специальных исполнений по способу монтажа, а именно: фланцевых (с фланцем на щите, с фланцем на станине), для вертикальной и горизонтальной установок, с фланцем и лапами, встроенных и других. Применение в станках фланцевых двигателей в ряде случаев позволяет осуществлять привод более компактно и совершенно.
Фланцевые двигатели применяют в первую очередь для привода рабочих органов с вертикальной осью (вертикально-сверлильные, резьбонарезные, плоскошлифовальные и крутлошлифовальные станки, продольно-фрезерные станки крупных размеров и др.). Применение вертикально-фланцевого двигателя, ось которого параллельна оси шпинделя станка, значительно упрощает конструкцию станков за счет изъятия конических колес, служащих для изменения направления вращения. При непосредственном соединении вала электродвигателя со шпинделем станка наиболее простое и рациональное конструктивное решение достигается при применении фланцевых электродвигателей.
 Встроенные двигатели, состоящие из пакета железа статора с обмоткой, короткозамкнутого ротора и вентилятора, не имеют станины, щитов, подшипников и вала, они являются наиболее совершенной формой органического соединения двигателя со станком. Встроенный двигатель собирают на станке. На вал станка насаживают ротор и вентилятор, статор же укрепляют в точно обработанной расточке станины станка и после посадки заштифтовывают. Установлено, что при применении встроенных двигателей достигается наивысшая компактность установки. Применение встроенных двигателей особенно удобно и целесообразно при соединении ротора двигателя с приводным механизмом станка без промежуточных передач.
Встроенные двигатели, состоящие из пакета железа статора с обмоткой, короткозамкнутого ротора и вентилятора, не имеют станины, щитов, подшипников и вала, они являются наиболее совершенной формой органического соединения двигателя со станком. Встроенный двигатель собирают на станке. На вал станка насаживают ротор и вентилятор, статор же укрепляют в точно обработанной расточке станины станка и после посадки заштифтовывают. Установлено, что при применении встроенных двигателей достигается наивысшая компактность установки. Применение встроенных двигателей особенно удобно и целесообразно при соединении ротора двигателя с приводным механизмом станка без промежуточных передач.
 Мотор-редукторы находят свое применение практически во всех областях промышленности. Мотор-редукторы по своей конструкции являются универсальными механизмами, которые используются при необходимости увеличить или уменьшить обороты, либо увеличить или уменьшить мощность. Мотор-редукторы состоят из редуктора и электродвигателя. Мотор-редукторы особенно хороши тем, что дают возможность использовать нужное расположение выходного вала и не нуждаются в соединительных муфтах между двигателем и редуктором, так как в мотор-редукторе двигатель крепится непосредственно к самому редуктору.
Мотор-редукторы находят свое применение практически во всех областях промышленности. Мотор-редукторы по своей конструкции являются универсальными механизмами, которые используются при необходимости увеличить или уменьшить обороты, либо увеличить или уменьшить мощность. Мотор-редукторы состоят из редуктора и электродвигателя. Мотор-редукторы особенно хороши тем, что дают возможность использовать нужное расположение выходного вала и не нуждаются в соединительных муфтах между двигателем и редуктором, так как в мотор-редукторе двигатель крепится непосредственно к самому редуктору.
 Применение мотор-редукторов позволяет значительно упростить и удишевить конструкцию привода, а также существенно снизиь затраты на его эксплуатацию и обслуживание. Обычно, все мотор-редукторы комплектуются стандартными электродвигателями, которые, в случае поломки, могут быть легко демонтированы и заменены. Мотор-редукторы также комплектуются двигателями постоянного тока небольшой мощности.
Применение мотор-редукторов позволяет значительно упростить и удишевить конструкцию привода, а также существенно снизиь затраты на его эксплуатацию и обслуживание. Обычно, все мотор-редукторы комплектуются стандартными электродвигателями, которые, в случае поломки, могут быть легко демонтированы и заменены. Мотор-редукторы также комплектуются двигателями постоянного тока небольшой мощности.
Электрошпиндель фирмы Faemat типа FA 80 HSLB с частотой вращения до 40 об/мин в минуту.
Асинхронные машины специального назначения




![]()
![]()
К асинхронным машинам специального назначения относят (рис. ):
1) Индукционный регулятор напряжения (ИР) (рис. 57, а) – представляет собой асинхронную машину с фазным ротором, предназначенную для плавного регулирования напряжения. Обмотки статора и ротора ИР имеют автотрансформаторную связь, поэтому его иногда называют поворотным автотрансформатором. Напряжение сети подводится к обмотке ротора, при этом ротор создаёт вращающееся магнитное поле, наводящее в обмотке статора ЭДС E2. При изменении угла поворота ротора от 0 до 180˚, напряжение в обмотке статора изменится от U2 min = U1-E2 до U2 max = U1+E2.
Рис. 57. Схема индукционного регулятора напряжения (ИР) (а) и фазорегулятора (ФР) (б).
2) Фазорегулятор (ФР) (рис. 57,б)- представляет собой асинхронную машину с фазным ротором, предназначенную для изменения фазы вторичного напряжения относительно первичного при неизменном вторичном напряжении. Обмотки статора и ротора ФР электрически не соединены друг с другом, т. е. имеют трансформаторную связь, поэтому ФР иногда называют поворотным трансформатором. ФР применяются в устройствах автоматики (для фазового управления) и в измерительной технике (для поверки ваттметров и счётчиков).
3) Сельсины – представляют собой небольшие одно – или трёхфазные асинхронные машины, предназначенные для работы в системах передачи угла (синхронного поворота) в системах дистанционного управления или контроля положения в пространстве каких-либо устройств (рис. 58). Простейшая синхронная передача, называемая индикаторной, содержит два сельсина: сельсин-датчик (СД) и сельсин-приёмник (СП). При включении обмоток возбуждения сельсинов в сеть в каждом из них создаётся магнитный поток возбуждения. Если роторы СД и СП занимают одинаковое положение относительно своих статоров, то система находится в равновесии, если же ротор СД повернуть на некоторый угол, то в цепи синхронизации потечёт электрический ток. Этот ток (ток синхронизации) взаимодействуя с магнитным потоком возбуждения СП создаст электромагнитный момент, который повернёт ротор СП на тот же угол, на который был повёрнут ротор СД.
Рис. 58. Синхронная индикаторная передача на сельсинах: СД – сельсин-датчик; СП – сельсин-приёмник.
4) Асинхронные исполнительные двигатели (ИД) (рис. 59) – представляют собой небольшие асинхронные электродвигатели. На статоре ИД расположена двухфазная обмотка; одна из обмоток – обмотка возбуждения (ОВ) – постоянно включена в сеть, а на другую – обмотку управления (ОУ) – подаётся напряжение (сигнал управления) лишь при необходимости включения двигателя. С помощью этих двигателей осуществляется преобразование электрического сигнала в механическое перемещение – вращение вала.
Рис.59. Схема асинхронного исполнительного двигателя: ОУ – обмотка управления; ОВ – обмотка возбуждения.
5) Линейные асинхронные двигатели (рис. 60) – это электродвигатели, подвижная часть которых совершает поступательное движение. Поэтому их применение для привода рабочих машин с поступательным движением рабочего органа позволяет упростить кинематику механизмов, уменьшить потери в передачах и повысить надёжность механизмов в целом. Если статор асинхронного двигателя с вращающимся ротором мысленно «разрезать» и «развернуть» в плоскость, то получим асинхронный линейный двигатель. Развёрнутый в плоскость статор двигателя (индуктор) создаёт бегущее магнитное поле и подвижная часть двигателя с короткозамкнутой обмоткой или без неё (вторичный элемент) перемещается вдоль своей оси. Подвижной частью может быть как индуктор, так и вторичный элемент. Возможны линейные двигатели четырёх видов: электромагнитные (соленоидные), магнитоэлектрические (с применением постоянного магнита), электродинамические и асинхронные (индукционные). Наибольшее применение получили асинхронные линейные двигатели благодаря простоте конструкции и высокой надёжности. Линейные асинхронные двигатели применяют на транспорте в качестве тяговых двигателей, в приводах конвейеров, заслонок, подъёмно-транспортных механизмов.
Рис. 60. Схема асинхронного двигателя с вращающимся ротором (а), с дуговым статором (б) и линейного асинхронного двигателя (в).
Раздел 4. Химические преобразователи электрической энергии
Электродвигатели специального назначения

Современный автоматизированный электропривод представляет собой сложную электромеханическую систему, содержащую различные по своей природе и назначению элементы: электрические машины, преобразователи электрической энергии, усилители, коммутационные аппараты и различные механические устройства.
Основным элементом электропривода является электрический двигатель, поэтому основные его свойства — надежность и срок службы, энергетические показатели, удобство управления, быстродействие и т. д. — во многом характеризуют электропривод в целом.
В настоящем разделе рассмотрены некоторые специальные двигатели, используемые в промышленности, транспорте и сельском хозяйстве. Применение таких двигателей позволяет создавать совершенные системы электропривода, наиболее полно удовлетворяющие условиям работы производственных механизмов, обеспечивающие интенсивное и качественное выполнение технологических операций и, как следствие этого, повышение производительности труда и качества выпускаемой продукции.
Развитие и совершенствование электрических двигателей идут по нескольким взаимосвязанным направлениям.
Одно из них состоит в разработке и применении новых, более качественных материалов, используемых при изготовлении двигателей. Новые виды изоляции обмоток двигателей позволяют повысить его рабочую температуру до 160°С и выше, что улучшает использование двигателя. Применение сплавов с улучшенными магнитными свойствами снижает расход металла и тем самым массу и габариты двигателя. Использование новых материалов, в частности пластмасс, повышает надежность и срок службы некоторых вспомогательных узлов и деталей двигателя.
Другое направление развития двигателей связано с совершенствованием конструкции и узлов известных «традиционных» видов электродвигателей, широко выпускаемых нашей электропромышленностью. Это связано с развитием научных методов расчета и конструирования двигателя в целом и отдельных его узлов па базе применения новых материалов и прогрессивной технологии.
И, наконец, относительно новое направление связано с созданием и выпуском электродвигателей, конструкция которых отличается от традиционной. Такие двигатели приобретают определенные специфические свойства и характеристики, делающие их применение особенно эффективным для механизмов и устройств, где такие свойства приводных двигателей весьма желательны. Иными словами, такие двигатели — условно назовем их специальными — наилучшим образом способны обеспечить специфические режимы работы этих механизмов и устройств, а конкретнее, специфическое движение их рабочих органов.
Какие же характерные виды движения рабочих органов, требующих применения специальных типов двигателей, могут иметь место на практике?
Очень часто от рабочих органов механизмов и устройств требуются быстрое изменение величины и направления скорости их движения или их быстрый разгон и останов. К таким механизмам и устройствам относятся металлорежущие станки копировальные и с программным управлением, различные системы автоматического регулирования, прокатные станы и т. д. Для обеспечения такого движения двигатель должен иметь минимально возможную механическую и электромагнитную инерцию и развивать значительный вращающий момент. Результатом разработок двигателей, отличающихся такими свойствами, стало появление двигателей с малоинерционными роторами (полыми цилиндрическими или дисковыми), с гладким якорем и с удлиненным ротором малого диаметра.
Повсеместным в практике электропривода является переход на использование в первую очередь бесконтактных элементов и устройств. Эта тенденция характерна и для развития электрических машин и выразилась, в частности, в появлении так называемых бесконтактных двигателей постоянного тока.
В некоторых механических устройствах, например механизмах подач металлорежущих станков, лентопротяжных механизмах киносъемочной и звуковой аппаратуры, нажимных устройствах валков прокатных станов и некоторых других, их рабочие органы при выполнении технологических операций должны совершать дискретные, шаговые перемещения. В принципе такое движение можно получить с помощью обычных двигателей и специальных схем управления ими, однако целесообразнее использовать так называемые шаговые электродвигатели, которые по принципу действия более просто и с лучшими показателями обеспечат такое движение.
В подавляющем большинстве систем электрического привода для согласования движения двигателя и производственного механизма применяются различные механические устройства (редукторы). Обычно они используются для снижения (редуцирования) частоты вращения вала двигателя, а в некоторых случаях и для преобразования вращательного движения двигателя в поступательное движение рабочего органа производственного механизма.
Очевидно, что весьма перспективным является создание такого двигателя, который имел бы небольшую собственную частоту вращения и мог бы непосредственно (без механической передачи) сочленяться с производственным механизмом. Результатом разработок в этом направлении явилось создание тихоходных редукторных двигателей, двигателей с катящимся ротором и волновых двигателей. Эти двигатели обеспечивают низкую частоту вращения выходного вала электропривода без применения редуктора или с использованием только небольших легких редукторов.
Для производственных механизмов с поступательным движением рабочего органа разработаны так называемые линейные электродвигатели с прямолинейным движением ротора, применение которых оказывается наиболее эффективным и перспективным в подъемно-транспортных механизмах и машинах.
Для повышения производительности многих механизмов важно обеспечить быстрое их торможение (останов) после завершения ими определенных технологических операций.
В электроприводе рабочих машин помимо описанных выше двигателей специального назначения находят применение и некоторые другие виды. Рассмотрим коротко их основные свойства и характеристики.
Высокомоментные двигатели постоянного тока способны развивать на валу значительные моменты как при вращении якоря, так и при его неподвижном состоянии, причем момент при неподвижном якоре может даже превышать момент при вращении двигателя. Тем самым использование таких двигателей позволяет зачастую исключить механическую передачу от двигателя к исполнительному органу и обеспечить регулирование скорости его движения в самых широких пределах. Кроме того, высокомоментные двигатели допускают значительную (до 10 крат) кратковременную перегрузку по моменту, что позволяет обеспечить высокое быстродействие исполнительного органа рабочей машины. Обычно возбуждение высокомоментных двигателей осуществляется от высокоэнергетических постоянных магнитов, а их охлаждение бывает естественным или независимым. В основном двигатели этого типа предназначены для привода металлорежущих станков, в том числе с числовым программным управлением. Отечественная электротехническая промышленность выпускает высокомоментные двигатели серии ПВ с вращающими моментами от 7 до 175 Н-м.
Гистерезисный двигатель является синхронным двигателем, ротор которого представляет собой массивный цилиндр без обмотки, выполненный из магнитотвердого материала. Вращающий момент такого двигателя складывается из двух составляющих — момента, создаваемого взаимодействием вращающегося магнитного поля двигателя с вихревыми токами ротора, и момента, создаваемого за счет явления гистерезиса при перемагничивании материала ротора (гистерезисный момент).
Достоинствами гистерезисного двигателя является простота конструкции, надежность в работе, отсутствие приспособлений для пуска. Двигатели этого типа выпускаются на мощности до 200 Вт и имеют довольно высокий КПД-—до 80%. Они применяются в приводах приборного типа, радиолах, электропроигрывателях, гироскопических устройствах. В последнем случае, когда требуются высокие (до 30 000 об/мин) частоты вращения, гистерезисные двигатели обычно выполняются по обращенной конструкции, при которой ротор охватывает неподвижный статор.
Однокоординатный линейный шаговый двигатель обычно имеет цилиндрический якорь и индуктор и по виду основных деталей мало отличается от вращающихся шаговых двигателей (ШД) индукторного типа. Двигатели этого типа серии ДШЛ имеют единичный шаг 1,25-10-3 м, частоту приемистости до 350 Гц и обеспечивают максимальное усилие до 300 Н при ходе до 40- 10-3 м.
Подобные двигатели предназначены для привода насосов, вытеснителей, дозаторов поступательного действия и особенно выгодны в устройствах, где требуется гибкое регулирование хода и скорости перемещения поршня. Дополнительное преимущество они приобретают в устройствах, где перемещение рабочего органа происходит в необычных условиях (жидкая среда, газ под высоким или низким давлением, агрессивная среда и др.) и где выгодно двигатель помещать непосредственно в эти условия, избегая необходимости герметизировать место установки привода.
На базе цилиндрических Линейных ШД созданы двухкоординатные линейно-поворотные двигатели, суммирующие на общем валу два независимых движения — поворотное и поступательное. Линейно-поворотное ШД типа ДШЛ-8 и ДШЛ-9 обеспечивают шаг поворота в 1 град и шаг поступательного перемещения от 0,011 до 1,25- 10-3 м, перемещения до 50- 10-3 м, моменты до 0,16 Н-м и усилия до 36 Н. Двигатели такого рода предназначены для манипуляторов и роботов, привода инструмента в станках, например в станках для автоматической притирки клапанов автомобильных двигателей.
Наиболее распространенными многокоординатными ШД являются двухкоординатные ШД, осуществляющие перемещения в плоскости по координатам X и У, а также сочетания этих ШД с ранее описанными линейно-поворотными двигателями (Z, ф-ШД). Характеристики одного из таких четырехкоординатных следующие: ход по координатам X и У —0,6 м, Z — 0,015 м; шаг соответственно 10 и 5 мкм, максимальное усилие до 80 Н. Двигатели такого рода, отличаясь высокой точностью и скоростью позиционирования, используются в приводах манипуляторов и в автоматических системах технологических линий. Многокоординатные опоры их выполняются, как правило, аэростатическими.
В стадии разработки находятся сферические ШД, обеспечивающие движение исполнительного органа в сферической системе координат.
Новые возможности в области электропривода малой мощности открываются с появлением так называемых пьезоэлектрических двигателей, в которых преобразование электрической энергии в механическую осуществляется за счет пьезоэлектрического или пьезо- магнитного эффекта, наблюдаемого в сегнетоэлекгрических или ферромагнитных материалах. Достоинства таких двигателей заключаются в отсутствии обмоток и простоте технологии изготовления, высоком КПД, широком диапазоне регулирования скорости и момента. В настоящее время планируется серийный выпуск пьезопривода для электропроигрывающего устройства и ведущего узла видеомагнитофона.
Структура обозначения электродвигателей
Основной блок
1 — Название серии
2 — Модификации
3 — Габарит, высота оси вращения (мм)
63, 71, 80, 90, 100, 112, 132, 160, 180
4 — Установочный размер по длине станины
5 — Длина сердечника статора
6 — Число полюсов
7 — Признак модификации
8 — Климатическое исполнение и категория размещения по ГОСТ 15150. Двигатели имеют исполнения для эксплуатации:
определяемые категориями размещения:
Выписка из ГОСТ 15150
| Климатическое исполнение | Категория размещения | Рабочая температура | |
| Верхнее значение | Нижнее значение | ||
| У | 1,2 | +40 | -45 |
| У | 3 | +40 | -45 |
| У | 5 | +35 | -5 |
| Т | 1,2 | +50 | -10 |
| Т | 3,4 | +45 | +1 |
| Т | 5 | +35 | +1 |
| УХЛ | 1,2,3 | +40 | -60 |
| УХЛ | 4 | +35 | +1 |
| УХЛ | 5 | +35 | -10 |
| ОМ | 1,2,3,5 | +45 | -40 |
| ОМ | 4 | +45 | -10 |
Дополнительный блок
9 — Номинальное напряжение, В.
Если напряжение не оговаривается в заказе, двигатель изготавливается на 380В, 50 Гц.
10 — Частота питающей сети, Гц.
11 — Конструктивное исполнение по способу монтажа по ГОСТ 2479:
По требованию заказчика двигатели изготавливаются с двумя выходными концами вала (IM 1082;
IM 2082; IM 3082; IM 2182; IM 3682).
12 — Степень защиты по ГОСТ IEC 60034-5
В стандартном исполнении двигатели изготавливаются со степенью защиты IP 54, IР 55
По согласованию электродвигатели могут быть выполнены со степенью защиты IP 56.
13 — Изоляция класса нагревостойкости по ГОСТ 8865
F; Н; С (на двигатели для системы дымоудаления)
1. Электродвигатели асинхронные с обслуживаемыми подшипниковыми узлами для комплектации механизмов повышенной надежности
Электродвигатели асинхронные с обслуживаемыми подшипниковыми узлами для комплектации механизмов повышенной надежности.
Основные параметры
Основные размеры, мм
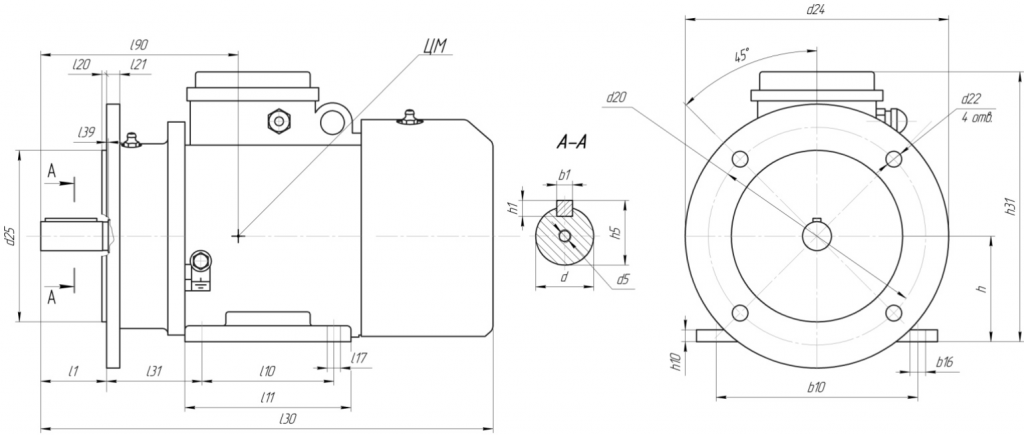
Установочные, присоединительные
| Тип | По валу | По лапам | По фланцу | ||||||||||||||||
| l1 | l90 | d | h1 | h5 | b1 | l31 | l10 | l11 | l17 | b10 | b16 | l20 | l21 | d20 | d22 | d24 | d25 | d5* | |
| РАДМ 80 | 50 | 150 | 22 | 6 | 24,5 | 6 | 72,5 | 100 | 126 | 10 | 125 | 12 | 3,5 | 10 | 165 | 12 | 200 | 130 | М8 |
| РАДМ 100 | 60 | 175 | 28 | 7 | 31,0 | 8 | 64,5 | 112 | 147 | 12 | 160 | 16 | 4,0 | 14 | 215 | 15 | 250 | 180 | М10 |
Габаритные
Размер l39 равен нулю, т.к. ступень выходного конца вала находится на одном уровне с поверхностью фланца.
* Резьбовые отверстия выполняются по требованию заказчика.
2. Электродвигатели для привода осевых вентиляторов с выносной коробкой выводов и с особыми требованиями
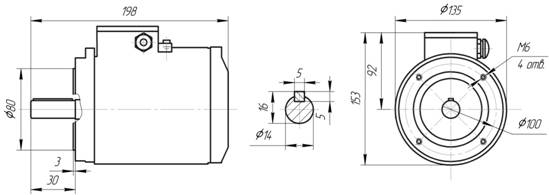
Электродвигатели для привода осевых вентиляторов с выносной коробкой выводов и с особыми требованиями.
Основные технические характеристики
| Типоразмер двигателя | Мощность, кВт | Ток, I н,А при 380В | КПД, % | Коэффициент мощности | Скольжение, % | Масса, кг | ||||
| Синхронная частота вращения 1500 об/мин | ||||||||||
| АДМПО 100SA4 | 1,1 | 2,4 | 79 | 0,85 | 5 | 1,4 | 1,2 | 2 | 5 | 21,3 |
Основные размеры, мм
3. Электродвигатели для привода радиальных вентиляторов с глухим щитом
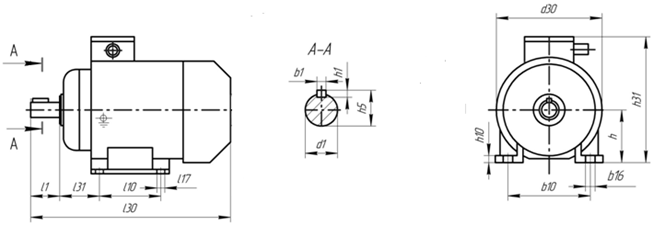
Электродвигатели для привода радиальных вентиляторов с глухим щитом.
Основные технические характеристики
| Типоразмер двигателя | Мощность, кВт | Ток, Iн, А при 380В | Момент, Мн, кГм | КПД, % | Коэффициент мощности | Скольжение, % | Масса, кг | ||||
| Синхронная частота вращения 1500 об/мин | |||||||||||
| 2АДМЦ1П63В2 | 0,12 | 0,38 | 0,04 | 60,0 | 0,79 | 5,0 | 1,2 | 2,0 | 1,0 | 4,5 | 4,9 |
Габаритные, установочные и присоединительные размеры, мм.
4. Транспортные электродвигатели
Электродвигатели серии АДМТ 63-АДМТ 132 выпускаются серийно по ТУ 3355-003-71952997-2008.
Климатические исполнения и категории размещения: У2; У1; УХЛ2; УХЛ1; Т2; Т; О2; О1 по ГОСТ 15150.
Номинальный режим работы по ГОСТ IЕС 60034-1:
Для двигателей АДМТ –S1.
Для двигателей c повышенным скольжением АДМТC – S3.
Двигатели допускают повторно-кратковременный режим работы с ПВ от 0% до 100%. Допускается работа с ПВ от 50% до 100% в течении двух часов, но не чаще одного раза за 3 часа эксплуатации. Среднее количество пусков электродвигателя не более 30 в час.
Класс изоляции Н по ГОСТ 8865.
Степень защиты IР54, IР55 по ГОСТ IEC 60034-5.
Группа механического воздействия по стойкости к воздействию механических внешних воздействующих факторов — М25-М29 по ГОСТ 17516.1.
Двигатели могут быть выполнены со встроенным датчиком температурной защиты.
В настоящее время сертифицированы в системе ССФЖТ следующие типы двигателей:
АДМТ 80А2 УХЛ1, IM108,1 IР54, 220/380В, 50Гц ;
IMMТ1П 100 LB4/2 УХЛ1, IM1081, IР55, 380В, 50Гц ;
АДМТС 112М2 У2, IM1081, IР54, 220/380В, 50Гц ;
АДМТС 112М2 У1, IM1081, IР54, 220/380В, 50Гц ;
АДМТС 132S4 У1, IM1081, IР54, 220/380В, 50Гц ;
IMMТ 132SB2 УХЛ1, IM2031, IР55, 456В, 60Гц;
АДМТ 90L4/2 УХЛ1, IM2131, IР55, 380В, 50Гц.
Не сертифицированы и могут быть изготовлены следующие типы двигателей:
IММТ112SA4 УХЛ1, IM2081, IР54, 380В, 100Гц ;
IММТ112LS4 УХЛ1, IM2081, IР54, 380В, 100Гц ;
АДМТ80А4 УХЛ1, IM2081, IM3081, IР54, 380В, 100Гц
Основные технические характеристики двигателей f=50Гц
| Типоразмер двигателя | Мощность, кВт | КПД, % | Коэффициент мощности | Скольжение, % | Mпуск/Mном | Mmax/Mном | Mmin/Mном | Iпуск/Iном | Масса, кг |
| Синхронная частота вращения 3000 об/мин | |||||||||
| АДМТ80А2 | 1,50 | 79,0 | 0,82 | 5,0 | 2,1 | 2,2 | 1,6 | 7,0 | 12,7 |
| АДМТС112М2 | 8,00 | 84,0 | 0,86 | 5,0 | 2,3 | 2,4 | 1,6 | 7,0 | 34,9 |
| Синхронная частота вращения 1500/3000 об/мин | |||||||||
| IMMT1П100LB4/2 | 0,75/3,0 | 75,0/79,0 | 0,77/0,85 | 3,0/5,0 | 2,5/1,7 | 3,5/2,2 | 2,5/1,3 | 7,0/5,0 | 23,8 |
| АДМТ90 L4/2 | 0,25/2,0 | 68,0/74,0 | 0,67/0,82 | 2,0/4,0 | 1,6/1,73 | 3,6/2,5 | 1,6/1,6 | 6,0/5,0 | 19,7 |
| Синхронная частота вращения 1500 об/мин | |||||||||
| АДМТС132S4 | 11,0 | 84,0 | 0,89 | 5,3 | 2,0 | 2,4 | 1,6 | 7,5 | 47,7 |
Данные на двигатели типа АДМТС даны при значении ПВ=40%.
Основные технические характеристики двигателей f=60Гц
| Типоразмер двигателя | Мощность, кВт | КПД, % | Коэффициент мощности | Скольжение, % | Mпуск/Mном | Mmax/Mном | Mmin/Mном | Iпуск/Iном | Масса, кг |
| Синхронная частота вращения 3600 об/мин | |||||||||
| IMMT132SB2 | 9,0 | 87,0 | 0,872 | 2,7 | 2,0 | 2,2 | 1,6 | 8,0 | 41,9 |
Основные технические характеристики двигателей f=100Гц
| Типоразмер двигателя | Мощность, кВт | КПД, % | Коэффициент мощности | Скольжение, % | Mпуск/Mном | Mmax/Mном | Mmin/Mном | Iпуск/Iном | Масса, кг |
| Синхронная частота вращения 3000 об/мин | |||||||||
| АДМТ80А4* | 1,1 | 80,0 | 0,76 | 2,3 | 2,2 | 2,2 | 1,6 | 6,0 | 12,5 |
| IММТ112SA4* | 2,2 | 84,0 | 0,84 | 1,8 | 2,0 | 2,6 | 1,8 | 7,0 | 26,0 |
| IММТ112LS4* | 5,5 | 86,0 | 0,83 | 2,0 | 2,0 | 2,6 | 1,8 | 7,0 | 31 |
| *Двигатели находятся в процессе постановки на производство | |||||||||
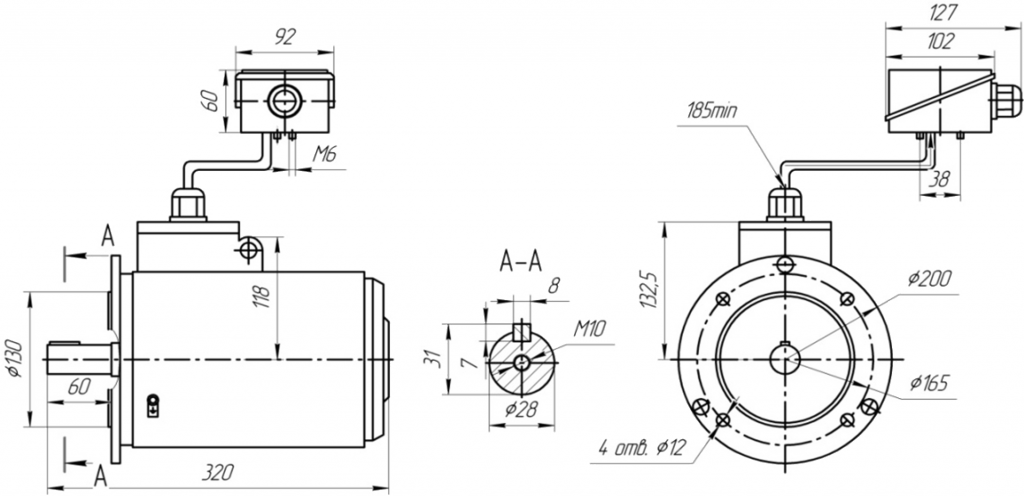
Габаритные, установочные и присоединительные размеры.
IM1081
IM2081, IM2181, IM2081, IM3081

| Обозначение размера | Типоразмер двигателя | |||||||
| АДМТ 80А | IMMТ1П 100LB4/2 | АДМТС 112M | АДМТС 132S | АДМТ90 L4/2 | IMMT 132SB2 | IMMT 112SB4 | IMMT 112LS4 | |
| l1 | 50 | 60 | 80 | 80 | 50 | 80 | 60 | |
| l10 | 100 | 140 | 140 | 140 | 125 | 140 | 140 | |
| l17 | 10 | 12 | 12,5 | 12,5 | 10 | 12,5 | 12 | |
| l30 | 295 | 320 | 445 | 485 | 340 | 445 | 391 | |
| b1 | 6 | 8 | 10 | 10 | 8,0 | 10,0 | 8 | |
| b10 | 125 | 160 | 190 | 216 | 140 | 216 | 190 | |
| b16 | 12 | 16 | 16 | 16 | 12 | 16 | 16 | |
| h | 80 | 100 | 112 | 132 | 90 | 132 | 112 | |
| h1 | 6 | 7 | 8 | 8 | 7,0 | 8,0 | 7 | |
| h5 | 24,5 | 31 | 35 | 41,0 | 27 | 41 | 31 | |
| h10 | 9 | 12 | 14 | 16 | 10 | 16 | 12 | |
| h31 | 205 | 243 | 275 | 295 | 224 | 295 | 255 | |
| d1 | 22 | 28 | 32 | 38 | 24 | 38 | 22 | |
| d30 | 180 | 226 | 252 | 252 | 200 | 252 | 226 | |
| l20 | 3,5 | 4,0 | 4,0 | 5,0 | 3,0 | 4,0 | 4,0 | |
| l21 | 10 | 14 | 14 | 14 | 10 | 14 | 14 | |
| l39 | ||||||||
| d20 | 165 | 215 | 265 | 300 | 115 | 265 | 215 | |
| d22 | 12 | 15 | 14 | 19 | М8 | 14 | 15 | |
| d24 | 200 | 250 | 300 | 350 | 140 | 300 | 250 | |
| d25 | 130 | 180 | 230 | 250 | 95 | 230 | 180 | |
| h37 | 125 | 134 | 163 | 163 | — | — | 143 | |
В двигателях IMMT 1П 100 вентилятор и кожух отсутствуют.
5. Электродвигатели переменного тока предназначены для эксплуатации в составе вентилятора охлаждения тягового электродвигателя электровоза с возможностью питания от частотно-регулируемого преобразователя
Электродвигатели переменного тока предназначены для эксплуатации в составе вентилятора охлаждения тягового электродвигателя электровоза с возможностью питания от частотно-регулируемого преобразователя.
Электродвигатели АДМТ(ВL) 180М2 выпускаются по ТУ3355-024-05758017-2012.
Номинальный режим работы S1 по ГОСТ IЕС 60034-1.
Класс изоляции Н по ГОСТ 8865.
Степень защиты IР55 по ГОСТ IEC 60034-5.
Конструктивное исполнение по способу монтажа — IM3911 по ГОСТ 2479.
Группа механического воздействия по стойкости к воздействию механических внешних воздействующих факторов — М 25 по ГОСТ 17516.1.
Максимально допустимое значение виброскорости не более 1,8 мм/с для условий жесткого крепления по ГОСТ IEC 60034-14.
Основные технические характеристики
| Типоразмер двигателя | Мощность кВт | КПД, % | Коэффициент мощности | Скольжение, % | ||||||
| Синхронная частота вращения 3000 об/мин | ||||||||||
| 22,0 | 380 | 90,0 | 0,90 | 2,0 | 2,0 | 2,3 | 1,8 | 7,5 | 190 | |
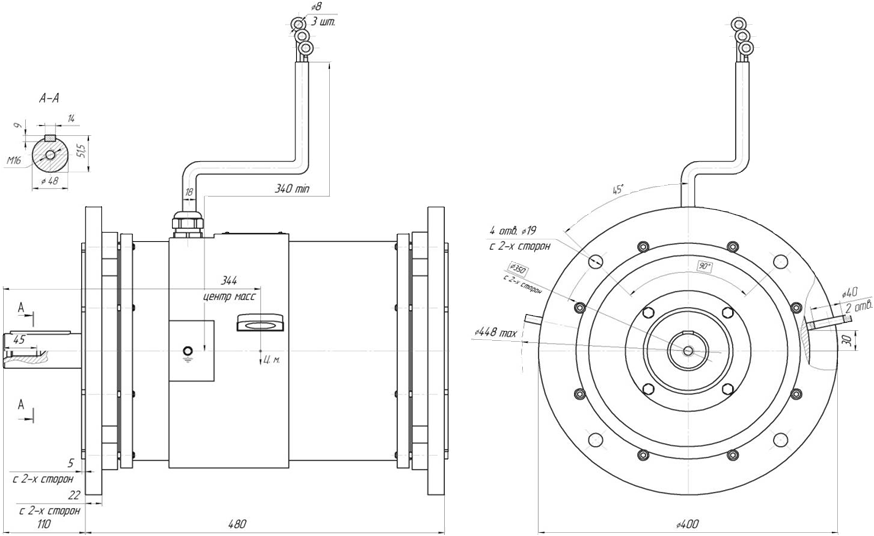
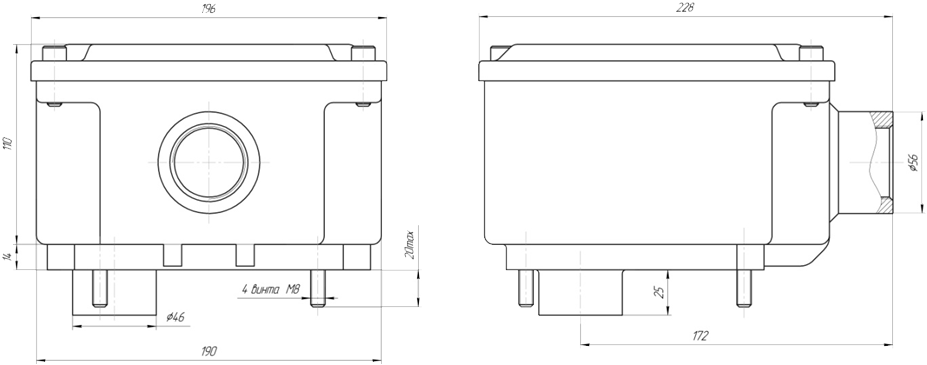
Габаритные, присоединительные размеры выносной коробки выводов, мм
6. Электродвигатели для привода герметичных хладоновых компрессоров и масляных насосов
Электродвигатели для привода герметичных хладоновых компрессоров и масляных насосов
Двигатели соответствуют требованиям ГОСТ РВ 20.39.301, ГОСТ РВ 20.39.308 для группы 2.3.2, ГОСТ 31606 и «Условиям поставки…. № 01-1874-62».
Двигатели изготавливаются на напряжение 220В и 380В частотой 50Гц, схема соединений обмоток статора – звезда.
В лобовую часть обмотки статора вмонтированы датчики температурной защиты.
Режим работы двигателей продолжительный.
Двигатели допускают не более 10 пусков подряд с интервалом 2 минуты.
Климатическое исполнение и категория размещения – ОМ4 по ГОСТ 15150.
Конструктивное исполнение по способу монтажа — IM5010 по ГОСТ 2479.
Двигатели в составе механизма обеспечивают надежную работу в следующих условиях:



