ОБЩИЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ АВТОМАТИКИ
2.1. Основные понятия и определения
Каждый из элементов характеризуется какими-либо свойствами, которые определяются соответствующими характеристиками. Некоторые из этих характеристик являются общими для большинства элементов.
Главной общей характеристикой элементов является коэффициент преобразования (или коэффициент передачи), представляющий собой отношение выходной величины элемента у к входной величине х, или отношение приращения выходной величины Δу или dy (см. рис. 1.3) к приращению входной величины Δх или dx. В первом случае K = у/х называется статическим коэффициентом преобразования, а во втором случае K’ = Δy/Δx ≈ dy/dx при Δx → 0 — динамическим коэффициентом преобразования. Связь между значениями x и у определяется функциональной зависимостью; значения коэффициентов K и K’ зависят от формы характеристики элемента или вида функции у =f(x), а также от того, при каких значениях величин подсчитываются K и K’. В большинстве случаев выходная величина изменяется пропорционально входной, и коэффициенты преобразования равны между собой, т.е. K= K’ = const.
Статический и динамический коэффициенты преобразования характеризуются величинами, имеющими размерность. Например, если размерность входной величины °C, а выходной а, то размерность коэффициента преобразования будет а/°С. Коэффициенты K и K’ могут быть также выражены в относительных (безразмерных) величинах при условии, что входная и выходная величины имеют одинаковую размерность.
Величина, представляющая собой отношение относительного приращения выходной величины Δу/у к относительному приращению входной величины Δх/х, называется относительным коэффициентом преобразования


Например, если изменение входной величины на 2 % вызывает изменение выходной величины на 3 %, то относительный коэффициент преобразования ηΔ = 1,5. Из последней формулы видно, что относительный коэффициент преобразования равен отношению динамического коэффициента преобразования к статическому. Следовательно, относительный коэффициент преобразования ηΔ размерности не имеет. Для преобразователя с пропорциональной характеристикой ηΔ = η = 1.
Применительно к различным элементам автоматики коэффициенты преобразования K’, K, ηΔи η имеют определенный физический смысл и свое название. Например, применительно к датчику коэффициент преобразования называется чувствительностью (статической, динамической, относительной); желательно, чтобы она была как можно больше. Для усилителей коэффициент преобразования принято называть коэффициентом усиления; желательно, чтобы он был также как можно больше. Для большинства усилителей (в том числе и электрических) величины x и y являются однородными, и поэтому коэффициент усиления представляет собой безразмерную величину.

При работе элементов выходная величина у может отклоняться от требуемого значения за счет изменения их внутренних свойств (износа, старения материалов и т.п.) или за счет изменения внешних факторов (колебания напряжения питания, окружающей температуры и др.), при этом происходит изменение характеристики элемента (кривая y’ на рис. 2.1). Это отклонение называется погрешностью, которая может быть абсолютной и относительной.
Относительной погрешностью называется отношение абсолютной погрешности Δу к номинальному (расчетному) значению выходной величины у. В процентах относительная погрешность определяется как y = Δy •100/у.
В зависимости от причин, вызывающих отклонение, различают температурную, частотную, токовую и другие погрешности.
Иногда пользуются приведенной погрешностью, под которой понимается отношение абсолютной погрешности к наибольшему значению выходной величины. В процентах приведенная погрешность

Если абсолютная погрешность постоянна, то приведенная погрешность также постоянна.
Погрешность, вызванная изменением характеристик элемента со временем, называется нестабильностью элемента.
Порогом чувствительности называется минимальная величина на входе элемента, которая вызывает изменение выходной величины (т.е. уверенно обнаруживается с помощью данного датчика). Появление порога чувствительности вызывают как внешние, так и внутренние факторы (трение, люфты, гистерезис, внутренние шумы, помехи и др.).

На рис. 2.2, а показана характеристика элемента при наличии «мертвого» хода. Из характеристики видно, что когда входная величина x изменяется в пределах от x1 до x2, выходная величина у не изменяется и равна нулю. Значения х1 и х2 называются порогами чувствительности, а расстояние между х1 и х2, равное Δх, — зоной нечувствительности. При наличии релейных свойств характеристика элемента может приобретать реверсивный характер (рис. 2.2, б). В этом случае она также обладает порогом чувствительности и зоной нечувствительности.
Основные понятия. Основные понятия и определения




![]()
![]()
ОБЩИЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ АВТОМАТИКИ
Основные понятия и определения
ТИПОВЫЕ ЭЛЕМЕНТЫ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
АВТОМАТИЗАЦИЯ
Современный научно-технический прогресс тесно связан с широким развитием автоматики.
Автоматизация — это отрасль науки и техники, охватывающая теорию и принципы построения систем управления техническими объектами и процессами, действующих без непосредственного участия человека.
Пример: система управления инжекторного ДВС.
Технический объект (станок, двигатель, летательный аппарат, поточная линия, автоматизированный участок, цех и т.д.), нуждающийся в автоматическом или автоматизированном управлении, называется объектом управления (ОУ).
Совокупность ОУ и автоматического управляющего устройства называется системой автоматического управления (САУ) или автоматизированной системой управления (АСУ).
Пр: контроллер + датчики – автоматическое управляющее устройство.
Автоматическое управляющее устройство представляет собой комплекс отдельных конструктивных или схемных элементов, каждый из которых выполняет задачу по преобразованию энергии, полученной от предыдущего элемента или окружающей среды, и передаче ее последующему элементу.
Автоматическое управляющее устройство состоит из элементов автоматики.
Пр: датчик положения дроссельной заслонки, Датчик температуры, датчик кислорода и др., контроллер (микропроцессор), устройство поворота дроссельной заслонки (исполнительный элемент), электромагнитный клапан форсунки и др.
В системах автоматического управления (САУ) в качестве сигналов обычно используются электрические и механические величины (например, постоянный ток, напряжение, давление сжатого газа или жидкости, усилие и т.п.), так как они позволяют легко осуществлять преобразование, сравнение, передачу на расстояние и хранение информации. В одних случаях сигналы возникают непосредственно вследствие протекающих при управлении процессов (изменения тока, напряжения, температуры, давления, наличия механических перемещений и т.д.), в других случаях они вырабатываются чувствительными элементами или датчиками.
Элементами автоматики называются конструктивно законченные устройства, выполняющие определенные самостоятельные функции преобразования сигнала (информации) в системах автоматического управления.
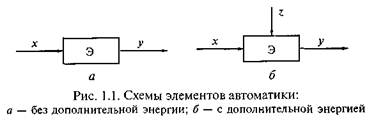
На рис. 1.1, а схематически изображен элемент Э. На его вход подается энергия х, после преобразования ее по значению на выходе возникает энергия у.(Пр: педаль акселератора). Иногда необходимо, чтобы энергия у на выходе была больше, чем энергия х на входе; в этом случае в элемент вводится дополнительная энергия вида z (рис. 1.1, б). Очевидно, при наличии дополнительной энергии возможно усиление небольшой входной энергии х до большой выходной энергии у (Пр.гидроусилитель руля).Здесь неэлектрические элементы: гидравлические, пневматические, механические и др
Чаще всего применяют электрические элементы, т. е. те, у которых величины х или у являются электрическими (например, напряжение, ток, сопротивление). Величины х и у могут быть электрическими и неэлектрическими (например, давление, перемещение).
Элементы автоматики обладают совокупностью характеристик:
Динамическая характеристика используется для оценки работы элемента в динамическом режиме, т.е. при быстром изменении входного сигнала. Статический и динамический характеризуются величинами, имеющими размерность. Например, если размерность входной величины °C, а выходной а, то размерность коэффициента преобразования будет а/°С. Коэффициенты K и K’ могут быть также выражены в относительных (безразмерных) величинах при условии, что входная и выходная величины имеют одинаковую размерность.
Коэффициенты преобразования (передачи) определяется по статической характеристике. Бывает: статический, динамический и относительный.

Статический коэффициент преобразования представляет собой отношение выходной величины элемента у к входной величине х,( K = у/х) или отношение приращения выходной величины Δу или dy (см. рис. 1.3) к приращению входной величины Δх или dx.

Динамический коэффициент преобразования определяется для элементов с нелинейной характеристикой K’= Δy/Δx ≈ dy/dx при Δx → 0.
Величина, представляющая собой отношение относительного приращения выходной величины Δу/у к относительному приращению входной величины Δх/х, называется относительным коэффициентом передачи ηΔ
Например, если изменение входной величины на 2 % вызывает изменение выходной величины на 3 %, то относительный коэффициент преобразования ηΔ = 1,5. Применительно к различным элементам автоматики коэффициенты преобразования K’, K, ηΔ и η имеют определенный физический смысл и свое название. Например, применительно к датчику коэффициент преобразования называется чувствительностью (статической, динамической, относительной); желательно, чтобы она была как можно больше. Для усилителей коэффициент преобразования принято называть коэффициентом усиления; желательно, чтобы он был также как можно больше.
При работе элементов выходная величина у может отклоняться от требуемого значения за счет изменения их внутренних свойств (износа, старения материалов и т.п.) или за счет изменения внешних факторов (колебания напряжения питания, окружающей температуры и др.), при этом происходит изменение характеристики элемента (кривая y’ на рис. 2.1). Это отклонение называется погрешностью, которая может быть абсолютной и относительной.

Относительной погрешностью называется отношение абсолютной погрешности Δу к номинальному (расчетному) значению выходной величины у. В процентах относительная погрешность определяется как y = Δy • 100/у.
В зависимости от причин, вызывающих отклонение, различают температурную, частотную, токовую и другие погрешности.
Порогом чувствительности называется минимальная величина на входе элемента, которая вызывает изменение выходной величины (т.е. уверенно обнаруживается с помощью данного датчика). Появление порога чувствительности вызывают как внешние, так и внутренние факторы (трение, люфты, гистерезис, внутренние шумы, помехи и др.).
Элементы автоматических систем
Воспринимающие элементы или первичные преобразователи (датчики) измеряют управляемые величины технологических процессов и преобразовывают их из одной физической формы в другую (например, термоэлектрический термометр преобразует разность температур в термоЭДС).
Задающие элементы автоматики (элементы настройки) служат для задания требуемого значения регулируемой величины Хо. Именно этому значению должно соответствовать ее действительное значение. Примеры задающих устройств: механические задатчики, электрические задатчики, например, резисторы с переменным сопротивлением, переменные индуктивности и переключатели.
Сравнивающие элементы автоматики сопоставляют заданное, значение, управляемой величины Х0 с действительным значением X. Получаемый на выходе, сравнивающего элемента сигнал рассогласования Δ Х = Хо — X передается либо через усилитель, либо непосредственно на исполнительный элемент.

Преобразующие элементы осуществляют необходимые преобразования сигнала и его усиление в магнитных, электронных, полупроводниковых и других усилителях, когда мощность сигналов недостаточна для дальнейшего использования.
Исполнительные элементы создают управляющие воздействия на объект управления. Они изменяют количество энергии или вещества, подводимой к объекту управления или отводимой от него, для того чтобы управляемая величина соответствовала заданному значению.
Корректирующие элементы служат для улучшения качества процесса управления.
Все элементы автоматики независимо от их назначения обладают определенной совокупностью характеристик и параметров которые определяют их эксплуатационные и технологические особенности.

Динамическая характеристика используется для оценки работы элемента в динамическом режиме, т. е. при быстрых изменениях входной величины. Ее задают переходной характеристикой, передаточной функцией, частотными характеристиками. Переходная характеристика представляет собой зависимость выходной величины Хвых от времени τ : Хвых = f ( τ ) — при скачкообразном изменении входного сигнала Хвх.
Коэффициент передачи можно определить по статической характеристике элемента. Различают три вида коэффициентов передачи: статический, динамический (дифференциальный) и относительный.
Статический коэффициент передачи K ст представляет собой отношение выходной величины Хвых к входной Хвх, т. е. Кст = Хвых/Хвх. Коэффициент передачи иногда называют коэффициентом преобразования. Применительно к конкретным конструктивным элементам статический коэффициент передачи называют также коэффициентом усиления (в усилителях), коэффициентом редукции (в редукторах), коэффициентом трансформации (в трансформаторах) и т. д.
Для элементов с нелинейной характеристикой используют динамический (дифференциальный) коэффициент передачи Кд, т. е. Кд = Δ Хвых/ Δ Хвх.
Относительный коэффициент передачи Кот равен отношению относительного изменения выходной величины элемента ΔХвых/Хвых. н к относительному изменению входной величины ΔХвх/Хвх. н,
Кот = (ΔХвых/Хвых. н)/ ΔХвх/Хвх. н,
где Хвых. н и Хвх. н — номинальные значения выходной и входной величин. Этот коэффициент является безразмерной величиной и удобен при сравнении элементов, различных по конструкции и принципу действия.

Порог чувствительности — наименьшее значение входной величины, при которой происходит заметное изменение выходной величины. Он вызывается наличием в конструкциях элементов трения без смазывающих материалов, зазоров и люфтов в соединениях.
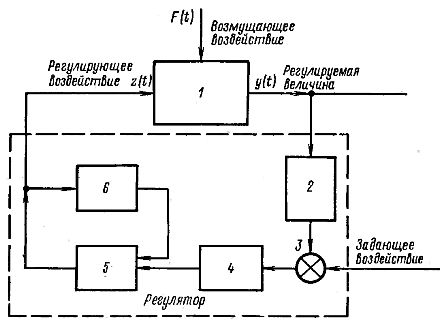
Особенностью автоматических замкнутых систем, в которых используется принцип управления по отклонению, является наличие обратной связи. Принцип действия обратной связи рассмотрим на примере системы управления температуры электрической нагревательной печи. Чтобы поддерживать температуру в заданных пределах, поступающее на объект управляющее воздействие, т. е. напряжение, подводимое, к нагревательным элементам, формируется с учетом значения температуры.
При помощи первичного преобразователя температуры выход системы соединяется с ее входом. Такое соединение, т. е. канал, информация по которому передается в обратном направлении по сравнению с управляющим воздействием, называют обратной связью.
Обратная связь бывает положительной и отрицательной, жесткой и гибкой, главной и дополнительной.
Если передаваемое воздействие зависит только от значения регулируемого параметра, т. е. не зависит от времени, то такую связь считают жесткой. Жесткая обратная связь действует как в установившемся, так и в переходном режимах. Гибкой обратной связью называют связь, действующую только в переходном режиме. Гибкая обратная связь характеризуется передачей по ней на вход первой или второй производной от изменения управляемой величины по времени. У гибкой обратной связи сигнал на выходе существует только тогда, когда управляемая величина изменяется во времени.
Главная обратная связь соединяет выход системы управления с ее входом, т. е. связывает управляемую величину с задающим устройством. Остальные обратные связи считают дополнительными или местными. Дополнительные обратные связи передают сигнал воздействия с выхода какого-либо звена системы на вход любого предыдущего звена. Они используются для улучшения свойств и характеристик отдельных элементов.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Основные характеристики элементов систем автоматики
Системы автоматики состоят из ряда связанных между собой элементов. Каждый элемент имеет свои физические свойства, которые определяются рядом характеристик и параметров.
В зависимости от характеристик элементов вся система также будет обладать своей характеристикой. Поэтому, зная характеристики отдельных элементов системы, мы сможем представить, как будет работать данная система.
Режим работы элемента (системы) при постоянных во времени входной x и выходной y величинах называют статическим (установившимся) режимом, т.е. в этом режиме:
x(t) = const; y(t) = const (1.1)
Функциональная зависимость x от y в установившемся режиме называется статической характеристикой:
y = f (x) (1.2)
Для элементов автоматики основным является режим работы, при котором x и y не остаются постоянными. Такой режим работы называется динамическим.
Процесс перехода из одного установившегося состояния в другое установившееся состояние называется переходным процессом. Он является частным случаем динамического режима.
Для оценки работы системы автоматики в переходом процессе служат динамические характеристики:
Эта характеристика дает возможность определить, как поведет себя система автоматики (элемент) при любом воздействии на ее вход.
Передаточная характеристика показывает зависимость изменения во времени выходной величины (y) от входной величины (x) в переходном режиме принулевых начальных условиях. Нулевые начальные условия – перед началом работы все параметры системы равны нулю.
y (t) = f (x (t)) (1.3)
Частотные характеристики– показывает изменение выходной величины y при изменении частоты входного сигнала x. Различают амплитудно-частотную и фазо-частотную характеристики.
y = f (ω) (1.4)
Коэффициент передачи элемента – представляет собой отношение выходной величины y элемента к входной величине x. В зависимости от режима работы, в котором определяется коэффициент передачи элемента, различают:
а) Статический коэффициент преобразования
Кст = y / x (1.5)
б) Динамический коэффициент преобразования – показывает во сколько раз приращение выходного сигнала Δ y увеличится или уменьшится при приращении входного сигнала Δ x
Кдин = Δ x / Δ y (1.6)
в) Относительный коэффициент преобразования показывает отношение относительного приращения выходного сигнала y к относительному приращению входного сигнала x:
Котн = (Δ y / y) / (Δ x / x) (1.7)
Порог чувствительности это наименьшее (по абсолютному значению) значение входного сигнала, способное вызвать изменение выходного сигнала. Появление порога чувствительности вызывают как внешние так и внутренние факторы (трение, люфты, внутренние шумы, помехи и т.д.).Интервал между значением входного сигнала, не оказывающего воздействия на значение выходного сигнала, и значением входного сигнала, оказывающего воздействие на значение выходного сигнала, называется зоной чувствительности.
Основные элементы систем автоматики
Рассмотрим некоторые основные элементы, наиболее часто применяемые в автоматике, разделяя их по выполняемым функциям.
Датчики
В системах автоматики датчик (измерительный преобразователь, чувствительный элемент) — устройство, предназначенное для того, чтобы информацию, поступающую на его вход в виде некоторой физической величины, функционально преобразовать в другую физическую величину на выходе, более удобную для воздействия на последующие элементы (блоки). Большинство датчиков преобразуют неэлектрическую контролируемую величину х в электрическую (например, температура преобразуется при помощи термопары в электродвижущую силу (ЭДС); механическое перемещение, связанное с изменением положения якоря электромагнита, изменяет индуктивность его обмотки и т.д.).
Поэтому датчики нередко называют первичными преобразователями.
Датчики являются наиболее широко распространенными элементами любой системы автоматики.
Условия работы датчиков, как правило, более тяжелые, чем у остальных элементов, т.к. они расположены непосредственно на объекте управления и подвергаются воздействию агрессивных сред, ударов, вибрации и т.п. В этих условиях к датчикам предъявляются жесткие требования по точности и стабильности преобразования.
Основной характеристикой датчика является зависимость его выходной величины у от входной х, т.е. у =f(x). На рис. 1.2 изображены некоторые распространенные виды зависимости выход-вход датчиков. Как видно из рисунка, функциональная связь может подчиняться любой закономерности, но желательно, чтобы характеристика датчика была линейной.

Классификация датчиков
В зависимости от принципа действия датчики делятся на:
По виду входного сигнала различают датчики:
По виду входного сигнала датчики могут быть:
В зависимости от вида контролируемой неэлектрической величины:
Параметрические (модуляторы) – это такие датчики, у которых изменение входной величины датчика вызывает изменение какого – либо параметра самого датчика (К ним относятся: контактные, реостатные, тензодатчики, потенциометрические, терморезисторы, ёмкостные,индуктивные, электронные, фоторезисторные и др.)
Генераторными называются такие датчики, у которых изменение входной величины датчика вызывает генерацию (появление, создание) электрического сигнала на его выходе. Эти датчики не требуют вспомогательного источника энергии. (К ним относят: термоэлектрические (термопары), индукционные, пъезоэлектрические, вентильные фотоэлементы).
Аналоговые датчики это такие датчики, у которых либо входной сигнал, либо сигнал на выходе, либо оба сигнала являются аналоговым.
У дискретных датчиков оба сигнала, или хотя бы один сигнал на входе или на выходе является дискретным (импульсным, цифровым и т.п.)
Линейные датчики – выходная величина изменяется пропорционально изменению входной величины.
Нелинейные датчики – выходная величина изменяется нелинейно относительно изменению входной величины.
Часто применяются электрические датчики с промежуточным преобразованием, т.е. механический датчик объединяют с электрическим. Преобразование контролируемой величины в таких датчиках происходит по схеме: измеряемая величина — механическое перемещение — электрическая величина.
Элемент, преобразующий измеряемую величину в перемещение, называется первичным преобразователем или первичным измерителем (ПИ). Например, давление преобразуется в перемещение стрелки манометра ПИ, которое затем преобразуется в изменение активного сопротивления (проволочный, резистивный (или реостатный) датчики и др.).
2. Усилитель— элемент автоматики, осуществляющий количественное преобразование (чаще всего усиление) поступающей на его вход физической величины (тока, мощности, напряжения, давления и т.п.). Усилитель обязательно должен иметь дополнительный источник энергии. Основной характеристикой усилителя является зависимость y = f(x); при этом обычно стремятся к получению линейной или близкой к ней характеристики на рабочем участке. Величины на входе и выходе усилителя имеют одинаковую физическую природу. На рис. 1.3 изображены различные виды характеристики усилителей.

Рисунок 1.3 Виды характеристики усилителей
По принципу действия усилители разделяются на: электронные, полупроводниковые, магнитные, электромашинные, пневматические, гидравлические.
3. Стабилизатор— элемент автоматики, обеспечивающий постоянство выходной величины у при колебаниях входной величины х в определенных пределах. Эффект стабилизации достигается за счет изменения параметров элементов, входящих в схему стабилизатора; при этом вид энергии на его входе и выходе должен быть один и тот же.
Характеристики стабилизаторов показаны на рис. 1.4.
 Рисунок 1.4 Виды основной характеристики стабилизаторов Рисунок 1.4 Виды основной характеристики стабилизаторов | Характеристика 1 обеспечивает меньшую стабилизацию выходной величины у, чем характеристика 2. В случае, если кривая не имеет в заданном диапазоне горизонтального участка, а имеет максимум (кривая 3) или минимум, то точность стабилизации будет больше, чем в случае, характеризуемом кривой 1. |
В зависимости от вида стабилизируемой величины различают стабилизаторы напряжения и тока, обеспечивающие постоянство напряжения или тока в нагрузке при колебаниях входного напряжения и сопротивления нагрузки.
4. Реле — элемент автоматики, в котором при достижении входной величины х определенного значения выходная величина у изменяется скачком. Зависимость у = f(x) реле неоднозначна и имеет форму петли (рис. 1.5). При изменении входной величины от 0 до х2 выходная величина у изменяется незначительно (или остается постоянной и равной у1). При достижении входной величины х значения х2, т.е. х = х2, выходная величина изменяется скачком от значения у1 до у2. Впоследствии при увеличении х выходная величина изменяется незначительно или остается постоянной (имеет установившееся значение). Когда входная величина уменьшается до значения х1 выходная величина сначала остается также неизменной и почти равной у2. В тот момент, когда х = х1 выходная величина скачком уменьшается до значения ух и сохраняется приблизительно неизменной при уменьшении х до нуля.

Рисунок 1.5 Основная характеристика реле
Скачкообразное изменение выходной величины у в момент, когда х = х2, называется величиной срабатывания (например, ток срабатывания, напряжение срабатывания для электрических реле). Скачкообразное изменение выходной величины у в момент, когда х = х1 называется величиной отпускания (ток отпускания, напряжение отпускания). Отношение величины хх к величине срабатывания х2 называется коэффициентом возврата, т.е. Kв = х1/х2. Так как обычно х1


Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам.

ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала.

ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между.

Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.).
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:



