Что такое векторные величины в физике? Все векторные величины
Содержание:
Физические величины служат для численного выражения различных характеристик материальных предметов и физических явлений. Все физические величины разделены на два вида. Векторные величины в физике – это те, которые кроме численного выражения обязательно характеризуются направлением. А вот обычные величины называют скалярными. Примерами таких величин могут служить:
Что такое векторная величина
Векторные величины в физике, список которых приведен ниже, широко известны:
Чтобы досконально разобраться в их смысле, попробуем рассмотреть простой пример. Каждый из нас неоднократно бросал или подбрасывал какой-либо предмет. Пусть это будет теннисный мячик. Сделать это можно разными способами:
В нашем эксперименте будем предполагать, что все три раза мячик бросает один и тот же человек, а сила броска всегда примерно одинакова. Какие результаты будут в итоге? Догадаться довольно просто: в каждом из случаев результат будет разным, потому что три раза мячик бросали в разном направлении. Таким образом мы увидели, что векторная величина это в физике одновременно две характеристики какого-либо физического процесса или состояния.
Действия над векторными величинами
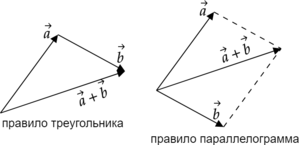
Теперь, когда мы установили, что такое векторная величина в физике, настало время подумать о действиях над такими величинами. Их можно складывать, вычитать, умножать, но важно помнить, что определяющим фактором будет их направление. Действия над такими величинами производят с использованием правил, принятых в математике. Например, сложение векторов производят с использованием правил треугольника или параллелограмма.
Что значит векторная величина в обычной жизни
В повседневной жизни мы зачастую даже не задумываемся, что значит векторная величина, и не замечем, что пользуемся векторами. Допустим, что два друга собрались поехать на рыбалку и договорились о встрече с утра за 100 м от автобусной остановки. Согласитесь, что намеченное мероприятие может оказаться под угрозой из-за того, что не было указано в каком конкретно направлении от остановки следует двигаться на указанное расстояние.
Другой пример из всем известной басни. Речь про лебедя, рака и щуку, которые дружно собрались потянуть тяжелый воз. Тяговую силу каждый из них приложил в своем направлении, не согласовав его с другими. В итоге воз не тронулся с места. Говоря языком физики, все векторные величины силы математически сложились так, что их равнодействующая оказалась равной нулю.
Ну и в заключительной части вспомним о том, что векторы в виде указующих стрелок принято использовать на дорожных знаках и различных табличках, информирующих о направлении движения в непредвиденных ситуациях либо помогающих найти соответствующий объект.
Что такое вектор в физике 9 класс кратко
1. Какая величина называется векторной (или просто вектором)?
Физическая величина, которая характеризуется не только числовым значением (модулем), но и направлением, называется векторной величиной (или просто вектором).
Для векторной величины одинаково важны числовое значение (модуль) и направление.
Примеры векторных величин:
— скорость,
— перемещение,
— сила.
2. Какая величина называются скалярной (или просто скаляром)?
Величины, которые не имеют направления и задаются только числом, называются скалярными величинами или скалярами.
Примеры скалярных величин:
3. Как изображают векторную величину?

Векторную величину изображают в виде стрелки, которая начинается в некоторой точке и заканчивается острием, указывающим направление..
Такой отрезок-стрелка называется вектором.
Длина стрелки в выбранном масштабе выражает модуль векторной величины.
Векторы обозначают буквами со стрелкой над ними.
Такой же буквой, но без стрелки обозначают модуль вектора.
4. Если два вектора равны друг другу по модулю, но направления векторов различны, то можно ли сказать, что эти векторы равны друг другу?
Нет, нельзя.
Равными считаются векторы, у которых одинаковы и модули, и направления.
5. Чем отличается векториая величина от скалярной?
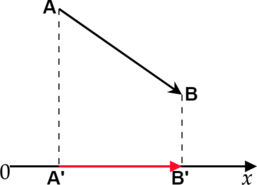
Проекция вектора на координатную ось
1. Как построить проекцию вектора на координатную ось?

Есть вектор а.
Опустим из точки А (начало вектора) и точки В (конец вектора) перпендикуляры на ось ОX.
Получим на оси точки ха и хв — это проекции точек А и В на ось ОX.
Длину отрезка ха-хв между проекциями начала и конца вектора называют проекцией вектора а на ось ОX и обозначают, как ах.
Проекцию вектора на ось обозначают той же буквой, что и вектор, но без стрелки и с индексом оси.
Проекция вектора — величина скалярная.
2. Если вектор перемещения параллелен координатной оси, то чему равен модуль проекции вектора на эту ось?
Если вектор параллелен оси координат, то модуль его проекции ( |ax| ) равен модулю ( a ) самого вектора.
3. Что называют проекцией вектора на координатную ось?
Длину отрезка на координатной оси между проекциями начала и конца вектора, взятую со знаком « + » или « —», называют проекцией вектора а на координатную ось.
Проекция вектора на координатную ось может быть, как положительной, так и отрицательной.

Проекция вектора на ось считается положительной, если вектор сонаправлен с этой осью.
Проекция вектора на ось считается отрицательной, если вектор направлен противоположно оси.
Если вектор перпендикулярен координатной оси, то при любом направлении вектора его проекция на ось равна нулю.
Векторы в физике
Закрепленный вектор — упорядоченная пара точек (направленный отрезок, имеющий начало и конец).
Длина вектора — расстояние между началом и концом вектора.
Если задана прямоугольная система координат, и координаты начала и конца вектора заданы в ней парами \(A=(x_1,y_1)\) и \(B=(x_2,y_2)\) соответственно, тогда координаты вектора можно задать \[\overrightarrow
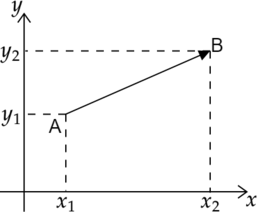
Тогда длина вектора \(\overrightarrow
Рассмотрим ситуацию, когда брусок движется по наклонной плоскости:
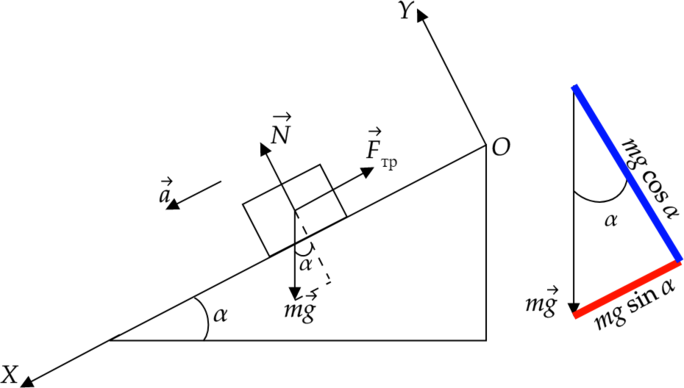
Исходя из рисунка мы можем записать II закон Ньютона в векторной форме: \[\vec
Запишем теперь проекции на оси:
Посмотрим, как получили два вышеприведенных равенства. Направим оси, как на рисунке, тогда по оси \(OY\) ускорение и сила трения на тело не действуют, так как они направлены перпендикулярно этой оси, а проекции сил, перпендикулярных оси, равны нулю.
Сложение векторов можно производить по правилу треугольника или по правилу параллелограмма, рассмотрим на примере.
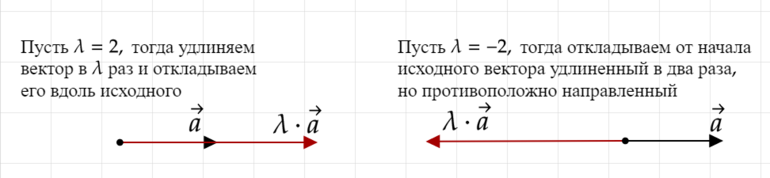
Рассмотрим различные варианты произведения вектора \(\vec\) на какое-то вещественное число \(\lambda\) :
При умножении на нулевое число получается нулевой вектор (вектор нулевой длины);
При умножении на положительное число получается вектор, сонапаравленный исходному вектору (происходит просто “удлинение” или “укорачивание” нашего вектора, направление не меняется);
При умножении на отрицательное число получается вектор, противоположно направленный исходному вектору (происходит “разворот” вектора на 180 градусов и изменение его длины одновременно).
Скалярным произведением векторов называют число, равное произведению длин этих векторов на косинус угла между ними.
Физический смысл скалярного произведения
Вектор (основные понятия физика)
ЧТО ТАКОЕ ВЕКТОРЫ (ОПРЕДЕЛЕНИЕ)
 Вектор или векторы — это величины, складываемые геометрическим способом. Они называются «векторами» потому, что их можно охарактеризовать, проведя отрезок прямой, показывающий как величину вектора (в некотором масштабе), так и его направление.
Вектор или векторы — это величины, складываемые геометрическим способом. Они называются «векторами» потому, что их можно охарактеризовать, проведя отрезок прямой, показывающий как величину вектора (в некотором масштабе), так и его направление.
Правило сложения двух векторов
Геометрическое сложение описывается следующим правилом. (Согласно определению векторов, оно автоматически применимо к ним.)
Чтобы сложить два вектора, выбирают подходящий масштаб и вычерчивают их в этом масштабе из одной точки, а затем строят на складываемых векторах параллелограмм. Тогда сумма векторов будет изображаться диагональю параллелограмма, соединяющей исходную точку с противолежащей вершиной.
Рис. Сложение векторов путем построения многоугольника
При таком способе сложения сумма нескольких векторов определяется как единственный вектор, который может заменить первоначальные векторы, или производит такой же физический эффект.
Подобно тому как векторы А и В дают при сложении сумму R2 (фиг. 45), можно сложить векторы А и В и С, прибавив С к
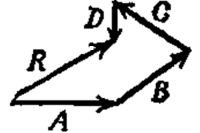
R2, в результате чего получим вектор R3. Прибавляя далее вектор D, получаем R4 и т. д. Или, проще говоря, любое количество векторов можно складывать, проводя следующий прибавляемый вектор из конца предыдущего, как показано на рис., и их сумма будет изображаться вектором, соединяющим исходную точку с конечной.
Какие величины относятся к векторам? Иначе говоря, какие величины складываются геометрически по правилу параллелограмма? Векторами являются перемещения, или, если называть их более строго, «направленные расстояния» или «смещения». Раз перемещения — векторы, то достаточно разделить их на промежуток времени, за который происходит перемещение, чтобы увидеть, что скорости — тоже векторы. Продолжая этот подход, мы видим, что ускорения — тоже векторы.
Нам встретятся и другие век торы, другие величины, которые нужно измерять с помощью приборов и которые подчиняются правилу геометрического сложения, Здесь возникает важный вопрос: являются ли силы векторами, т.е. подчиняются ли они правилам геометрического сложения? На этот вопрос нельзя ответить, просто подумав. Ответ не очевиден и требует предварительного изучения.
Скаляры
Физические величины, которые имеют только величину и которым нельзя приписать никакого направления, называются скалярами; хорошими примерами скалярных величин служат объем и температура. Существуют и такие вещи, которые не являются ни векторами, ни скалярами, скажем доброта, а также некоторые величины, этакие «сверхвекторы», называемые тензорами.
Примером тензоров могут служить напряжения в деформированном твердом теле: давление, перпендикулярное к любой площадке образца, и срезающие усилия, действующие вдоль нее. Более сложные примеры встречаются в математической теории относительности.
Например, мы будем рассматривать количество движения т v как вектор с тремя компонентами: т v х, т v у, т v z, а кинетическую энергию — как скаляр. Эйнштейн, придерживаясь обобщенного представления о пространстве-времени, предпочитал объединять количество движения и кинетическую энергию в «четырехвектор», т. е. с четырьмя компонентами: три для количества движения и одна для кинетической энергии.
Сложение нескольких векторов
Два вектора складываются по правилу параллелограмма. Сложение A + B=R (знаки + и =, напечатанные жирным шрифтом, обозначают геометрическое сложение). Исходя из этого определения, мы можем прийти к более примитивным способам сложения «одного перемещения, а потом другого». Это простейший способ сложения нескольких векторов. Если нам нужно сложить векторы А, В, С, D, то можно было бы складывать их, применяя последовательное построение параллелограмма: получить сумму A+B, прибавить ее к С, а затем прибавить новую сумму к D.
Однако такое построение утомительно, и если выполнить все его этапы на одном чертеже, получится изрядная путаница. Вместо этого сложим А и В по правилам многоугольника, проведя В из конца А, затем прибавим С к их сумме, проведя С из конца этой суммы, затем прибавим D. Можно опустить промежуточные суммы и найти общую сумму R, соединив начало первого вектора с концом последнего.
Проведение параллельных прямых
 Чтобы переместить вектор с одного места на листе бумаги в другое, нужно начертить на новом месте отрезок прямой, имеющий ту же длину и то же направление, что и прежний отрезок, т. е. новый отрезок должен быть параллелен первому. Существуют геометрические методы и приспособления, позволяющие провести прямую, параллельную другой прямой. Мы покажем вам
Чтобы переместить вектор с одного места на листе бумаги в другое, нужно начертить на новом месте отрезок прямой, имеющий ту же длину и то же направление, что и прежний отрезок, т. е. новый отрезок должен быть параллелен первому. Существуют геометрические методы и приспособления, позволяющие провести прямую, параллельную другой прямой. Мы покажем вам
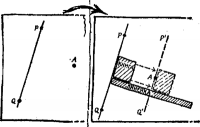
Рис. 2. Простой способ проведения параллельных прямых
хотя бы один способ построения параллельных прямых. Для этого не требуется сложного построения углов.
На рис. 1 показан простой способ проведения параллельных прямых при помощи линейки или обложки книги (или любого прямоугольника или треугольника). Чтобы провести через точку А прямую P’Q’, параллельную прямой Р Q, расположите один край книги вдоль прямой PQ.
Приложите к другому краю книги линейку. Прижав линейку к бумаге, перемещайте вдоль нее книгу до тех пор, пока та сторона книги, которую вы совместили с прямой PQ, не пройдет через точку А. Теперь проведите по этой стороне требуемую прямую P’Q’ через точку А.
Похожие страницы:
Понравилась статья поделись ей
ВЕКТОР
ВЕКТОР. В физике и математике вектор – это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким, как масса, объем, давление, температура и плотность, которые можно описать обычным числом, и называются они «скалярами».

Векторная запись используется при работе с величинами, которые невозможно задать полностью с помощью обычных чисел. Например, мы хотим описать положение предмета относительно некоторой точки. Мы можем сказать, сколько километров от точки до предмета, но не можем полностью определить его местоположение, пока не узнаем направление, в котором он находится. Таким образом, местонахождение предмета характеризуется численным значением (расстоянием в километрах) и направлением.
Графически векторы изображаются в виде направленных отрезков прямой определенной длины, как  на рис. 1. Например, для того чтобы представить графически силу в пять килограммов, надо нарисовать отрезок прямой длиной в пять единиц в направлении действия силы. Стрелка указывает, что сила действует от A к B; если бы сила действовала от B к A, то мы бы записали
на рис. 1. Например, для того чтобы представить графически силу в пять килограммов, надо нарисовать отрезок прямой длиной в пять единиц в направлении действия силы. Стрелка указывает, что сила действует от A к B; если бы сила действовала от B к A, то мы бы записали  или
или  . Для удобства векторы обычно обозначаются полужирными прописными буквами (A, B, C и так далее); векторы A и –A имеют равные численные значения, но противоположны по направлению. Численное значение вектора А называется модулем или длиной и обозначается A или |A|. Это величина, конечно, скаляр. Вектор, начало и конец которого совпадают, называется нулевым и обозначается O.
. Для удобства векторы обычно обозначаются полужирными прописными буквами (A, B, C и так далее); векторы A и –A имеют равные численные значения, но противоположны по направлению. Численное значение вектора А называется модулем или длиной и обозначается A или |A|. Это величина, конечно, скаляр. Вектор, начало и конец которого совпадают, называется нулевым и обозначается O.
Два вектора называются равными (или свободными), если их модули и направления совпадают. В механике и физике этим определением, однако, надо пользоваться с осторожностью, так как две равных силы, приложенные к различным точкам тела в общем случае будут приводить к различным результатам. В связи с этим векторы подразделяются на «связанные» или «скользящие», следующим образом:
Связанные векторы имеют фиксированные точки приложения. Например, радиус-вектор указывает положение точки относительно некоторого фиксированного начала координат. Связанные векторы считаются равными, если у них совпадают не только модули и направления, но они имеют и общую точку приложения.
Скользящими векторами называются равные между собой векторы, расположенные на одной прямой.
Сложение векторов.
Идея сложения векторов возникла из того, что мы можем найти единственный вектор, который оказывает то же воздействие, что и два других вектора вместе. Если для того, чтобы попасть в некоторую точку, нам надо пройти сначала A километров в одном направлении и затем B километров в другом направлении, то мы могли бы достичь нашей конечной точки пройдя C километров в третьем направлении (рис. 2). В этом смысле можно сказать, что
Вектор C называется «результирующим вектором» A и B, он задается построением, показанным на рисунке; на векторах A и B как на сторонах построен параллелограмм, а C – диагональ, соединяющая начало А и конец В. Из рис. 2 видно, что сложение векторов «коммутативно», т.е.
Аналогичным образом можно сложить несколько векторов, последовательно соединяя их «непрерывной цепочкой», как показано на рис. 3 для трех векторов D, E и F. Из рис. 3 также видно, что
т.е. сложение векторов ассоциативно. Суммировать можно любое число векторов, причем векторы необязательно должны лежать в одной плоскости. Вычитание векторов представляется как сложение с отрицательным вектором. Например,
где, как определялось ранее, –B – вектор, равный В по модулю, но противоположный по направлению.
Это правило сложения может теперь использоваться как реальный критерий проверки, является ли некоторая величина вектором или нет. Перемещения обычно подчиняются условиям этого правила; то же можно сказать и о скоростях; силы складываются таким же образом, как можно было видеть из «треугольника сил». Однако, некоторые величины, обладающие как численными значениями так и направлениями, не подчиняются этому правилу, поэтому не могут рассматриваться как векторы. Примером являются конечные вращения.
Умножение вектора на скаляр.
Произведение mA или Am, где m (m № 0) – скаляр, а A – ненулевой вектор, определяется как другой вектор, который в m раз длиннее A и имеет тоже направление что и A, если число m положительно, и противоположное, если m отрицательно, как показано на рис. 4, где m равно 2 и –1/2 соответственно. Кроме того, 1A = A, т.е. при умножении на 1 вектор не изменяется. Величина –1A – вектор, равный A по длине, но противоположный по направлению, обычно записывается как –A. Если А – нулевой вектор и(или) m = 0, то mA – нулевой вектор. Умножение дистрибутивно, т.е.
Мы можем складывать любое число векторов, причем порядок слагаемых не влияет на результат. Верно и обратное: любой вектор раскладывается на две или более «компоненты», т.е. на два вектора или более, которые, будучи сложенными, в качестве результирующего дадут исходный вектор. Например, на рис. 2, A и B – компоненты C.
Многие математические действия с векторами упрощаются, если разложить вектор на три компоненты по трем взаимно перпендикулярным направлениям. Выберем правую систему декартовых координат с осями Ox, Oy и Oz как показано на рис. 5. Под правой системой координат мы подразумеваем, что оси x, y и z располагаются так, как могут быть расположены соответственно большой, указательный и средний пальцы правой руки. Из одной правой системы координат всегда можно получить другую правую систему координат соответствующим вращением. На рис. 5, показано разложение вектор A на три компоненты  и
и  . Они в сумме составляют вектор A, так как
. Они в сумме составляют вектор A, так как


Можно было бы также сначала сложить  и получить
и получить  , а затем к прибавить
, а затем к прибавить  .
.
Проекции вектора А на три координатные оси, обозначенные Ax, Ay и Az называются «скалярными компонентами» вектора A:

Два вектора равны тогда и только тогда, когда равны их соответствующие скалярные компоненты. Таким образом, A = B тогда и только тогда, когда Ax = Bx, Ay = By, Az = Bz.
Два вектора можно сложить, складывая их компоненты:

Кроме того, по теореме Пифагора:
Линейные функции.
Выражение aA + bB, где a и b – скаляры, называется линейной функцией векторов A и B. Это вектор, находящийся в той же плоскости, что A и B; если A и B не параллельны, то при изменении a и b вектор aA + bB будет перемещаться по всей плоскости (рис. 6). Если A, B и C не все лежат в одной плоскости, то вектор aA + bB + cC (a, b и c изменяются) перемещается по всему пространству. Предположим, что A, B и C – единичные векторы i, j и k. Вектор ai лежит на оси x; вектор ai + bj может перемещаться по всей плоскости xy; вектор ai + bj + ck может перемещаться по всему пространству.
Можно было бы выбрать четыре взаимно перпендикулярных вектора i, j, k и l и определить четырехмерный вектор как величину
а можно было бы продолжать до пяти, шести или любого числа измерений. Хотя визуально такой вектор представить невозможно, никаких математических трудностей здесь не возникает. Такая запись часто бывает полезна; например, состояние движущейся частицы описывается шестимерным вектором P (x, y, z, px, py, pz), компоненты которого – ее положение в пространстве (x, y, z) и импульс (px, py, pz). Такое пространство называется «фазовым пространством»; если мы рассматриваем две частицы, то фазовое пространство 12-мерное, если три, то 18-ти и так далее. Число размерностей можно неограниченно увеличивать; при этом величины, с которыми мы будем иметь дело, ведут себя во многом также, как те, которые мы рассмотрим в оставшейся части этой статьи, а именно, трехмерные векторы.
Умножение двух векторов.
Правило сложения векторов было получено путем изучения поведения величин, представленных векторами. Нет никаких видимых причин, по которым два вектора нельзя было бы каким-либо образом перемножить, однако это умножение будет иметь смысл только в том случае, если можно показать его математическую состоятельность; кроме того, желательно, чтобы произведение имело определенный физический смысл.
Существуют два способа умножения векторов, которые соответствуют этим условиям. Результатом одного из них является скаляр, такое произведение называется «скалярным произведением» или «внутренним произведением» двух векторов и записывается A Ч B или (A, B). Результатом другого умножения является вектор, называемый «векторным произведением» или «внешним произведением» и записывается A ґ B или [A, B]. Скалярные произведения имеют физический смысл для одного-, двух- или трех измерений, тогда как векторные произведения определены только для трех измерений.
Скалярные произведения.
Это – пример физического обоснования скалярного произведения, определенного для любых двух векторов A, B посредством формулы
Так как все величины правой части уравнения – скаляры, то
следовательно, скалярное умножение коммутативно.
Скалярное умножение также обладает свойством дистрибутивности:
Если векторы A и B перпендикулярны, то cos б A, B с равен нулю, и, поэтому, A Ч B = 0, даже если ни A, ни B не равны нулю. Именно поэтому мы не можем делить на вектор. Допустим, что мы разделили обе части уравнения A Ч B = A Ч C на A. Это дало бы B = C, и, если бы можно было бы выполнить деление, то это равенство стало бы единственным возможным результатом. Однако, если мы перепишем уравнение A Ч B = A Ч C в виде A Ч (B – C) = 0 и вспомним, что (B – C) – вектор, то ясно, что (B – C) необязательно равен нулю и, следовательно, B не должен быть равным C. Эти противоречивые результаты показывают, что векторное деление невозможно.
Скалярное произведение дает еще один способ записи численного значения (модуля) вектора:

Скалярное произведение можно записать и другим способом. Для этого вспомним, что:

Поскольку последнее уравнение содержит x, y и z в качестве нижних индексов, уравнение, казалось бы, зависит от выбранной конкретной системы координат. Однако это не так, что видно из определения, которое не зависит от выбранных координатных осей.
Векторные произведения.
Векторным или внешним произведением векторов называется вектор, модуль которого равен произведению их модулей на синус угла, перпендикулярный исходным векторам и составляющий вместе с ними правую тройку. Это произведение легче всего ввести, рассматривая соотношение между скоростью и угловой скоростью. Первая – вектор; мы теперь покажем, что последнюю также можно интерпретировать как вектор.
Угловая скорость вращающегося тела определяется следующим образом: выберем любую точку на теле и проведем перпендикуляр из этой точки до оси вращения. Тогда угловая скорость тела – это число радиан, на которые эта линия повернулась за единицу времени.
Если угловая скорость – вектор, она должна иметь численное значение и направление. Численное значение выражается в радианах в секунду, направление можно выбрать вдоль оси вращения, можно его определить, направив вектор в том направлении, в котором двигался бы правосторонний винт при вращении вместе с телом.
Рассмотрим вращение тела вокруг фиксированной оси. Если установить эту ось внутри кольца, которое в свою очередь закреплено на оси, вставленной внутрь другого кольца, мы можем придать вращение телу внутри первого кольца с угловой скоростью w 1 и затем заставить внутреннее кольцо (и тело) вращаться с угловой скоростью w 2. Рисунок 7 поясняет суть дела; круговые стрелки показывают направления вращения. Данное тело – это твердая сфера с центром О и радиусом r.

Это расстояние равно нулю, если

Чему равна угловая скорость сферы? Выберем для простоты точку A, в которой ось w 1 пересекает поверхность. В момент времени, который мы рассматриваем, она перемещается за время D t на расстояние

по кругу радиуса r sin w 1. По определению, угловая скорость
Из этой формулы и соотношения (1) мы получим

Другими словами, если записать численное значение и выбрать направление угловой скорости так, как это описано выше, то эти величины складываются как векторы и могут быть рассмотрены как таковые.
Вектор скорости V является касательным к окружности и указывает в направлении, показанном на рис. 8.
Это уравнение дает зависимость скорости V точки от комбинации двух векторов w и r. Используем это соотношение, чтобы определить новый вид произведения, и запишем:
Так как результатом такого умножения является вектор, это произведение названо векторным. Для любых двух векторов A и B, если
и направление вектора C таково, что он перпендикулярен плоскости, проходящей через А и B и указывает в направлении, совпадающем с направлением движения правовращающегося винта, если он параллелен C и вращается от A к B. Другими словами, мы можем сказать, что A, B и C, расположенные в таком порядке, образуют правый набор координатных осей. Векторное произведение антикоммутативно; вектор B ґ A имеет тот же модуль, что и A ґ B, но направлен в противоположную сторону:
Это произведение дистрибутивно, но не ассоциативно; можно доказать, что
Посмотрим, как записывается векторное произведение в терминах компонент и единичных векторов. Прежде всего, для любого вектора A,
Следовательно, в случае единичных векторов,

Это равенство также можно записать в виде определителя:
Если A ґ B = 0, то либо A или B равно 0, либо A и B коллинеарны. Таким образом, как и в случае скалярного произведения, деление на вектор невозможно. Величина A ґ B равна площади параллелограмма со сторонами A и B. Это легко видеть, так как B sin б A, B с – его высота и A – основание.
Существует много других физических величин, которые являются векторными произведениями. Одно из наиболее важных векторных произведений появляется в теории электромагнетизма и называется вектором Пойтинга P. Этот вектор задается следующим образом:
где E и H – векторы электрического и магнитного полей соответственно. Вектор P можно рассматривать как заданный поток энергии в ваттах на квадратный метр в любой точке. Приведем еще несколько примеров: момент силы F (крутящий момент) относительно начала координат, действующей на точку, радиус-вектор которой r, определяется как r ґ F; частица, находящаяся в точке r, массой m и скоростью V, имеет угловой момент mr ґ V относительно начала координат; сила, действующая на частицу, несущую электрический заряд q через магнитное поле B со скоростью V, есть qV ґ B.
Тройные произведения.
Из трех векторов мы можем сформировать следующие тройные произведения: вектор (A Ч B) ґ C; вектор (A ґ B) ґ C; скаляр (A ґ B) Ч C.
Первый тип – произведение вектора C и скаляра A Ч B; о таких произведениях мы уже говорили. Второй тип называется двойным векторным произведением; вектор A ґ B перпендикулярен к плоскости, где лежат A и B, и поэтому (A ґ B) ґ C – вектор, лежащий в плоскости A и B и перпендикулярный C. Следовательно, в общем случае, (A ґ B) ґ C № A ґ (B ґ C). Записав A, B и C через их координаты (компоненты) по осям x, y и z и умножив, можно показать, что A ґ (B ґ C) = B ґ (A Ч C) – C ґ (A Ч B). Третий тип произведения, который возникает при расчетах решетки в физике твердого тела, численно равен объему параллелепипеда с ребрами A, B, C. Так как (A ґ B) Ч C = A Ч (B ґ C), знаки скалярного и векторного умножений можно менять местами, и произведение часто записывается как (A B C). Это произведение равно определителю
Заметим, что (A B C) = 0, если все три вектора лежат в одной и той же плоскости или, если А = 0 или (и) В = 0 или (и) С = 0.
ДИФФЕРЕНЦИРОВАНИЕ ВЕКТОРА
Предположим, что вектор U является функцией одной скалярной переменной t. Например, U может быть радиус-вектором, проведенным из начала координат до перемещающейся точки, а t – временем. Пусть t изменится на небольшую величину D t, что приведет к изменению U на величину D U. Это показано на рис. 9. Отношение D U/ D t – вектор, направленный в том же направлении, что и D U. Мы можем определить производную U по t, как
при условии, что такой предел существует. С другой стороны, можно представить U как сумму компонент по трем осям и записать
Если U – радиус-вектор r, то dr/dt – скорость точки, выраженная как функция времени. Продифференцировав по времени еще раз, мы получим ускорение. Предположим, что точка перемещается вдоль кривой, показанной на рис. 10. Пусть s – расстояние, пройденное точкой вдоль кривой. В течение малого интервала времени D t точка пройдет расстояние D s вдоль кривой; положение радиус-вектора изменится на D r. Следовательно D r/ D s – вектор направленный как D r. Далее

есть единичный вектор, касательный к кривой. Это видно из того, что при приближении точки Q к точке P, PQ приближается к касательной и D r приближается к D s.
Формулы для дифференцирования произведения подобны формулам для дифференцирования произведения скалярных функций; однако, так как векторное произведение антикоммутативно, порядок умножения должен быть сохранен. Поэтому,
Таким образом, мы видим, что, если вектор является функцией одной скалярной переменной, то мы можем представить производную почти также, как в случае скалярной функции.
Вектор и скалярные поля.
Градиент.
Простые частные производные, такие, как ¶ U/ ¶ x и ¶f / ¶ y, нас не устраивают, потому что они зависят от конкретно выбранных координатных осей. Однако можно ввести векторный дифференциальный оператор, независимый от выбора осей координат; этот оператор называется «градиентом».
где точками обозначены члены более высоких порядков. Это выражение можно записать в виде скалярного произведения
Разделим правую и левую части этого равенства на D s, и пусть D s стремится к нулю; тогда
где dr/ds – единичный вектор в выбранном направлении. Выражение в круглых скобках – вектор, зависящий от выбранной точки. Таким образом, d f /ds имеет максимальное значение, когда dr/ds указывает в том же направлении, выражение, стоящее в скобках, является градиентом. Таким образом,
– вектор, равный по величине и совпадающий по направлению с максимальной скоростью изменения f относительно координат. Градиент f часто записывается в виде
Это означает, что оператор С существует сам по себе. Во многих случаях он ведет себя, как вектор, и фактически является «векторным дифференциальным оператором» – одним из наиболее важных дифференциальных операторов в физике. Несмотря на то, что С содержит единичные векторы i, j и k, его физический смысл не зависит от выбранной системы координат.

Если q – величина (например масса, заряд), перемещенная на D r, то работа, выполненная при перемещении q на D r равна
Допустим, что U создается точечным электрическим зарядом в q кулонов, помещенным в начало координат. Значение U в точке P (x, y, z) с радиус-вектором r задается формулой

где e 0 – диэлектрическая постоянная свободного пространства. Поэтому
откуда следует, что E действует в направлении r и его величина равна q/(4 pe 0r 3 ).
Зная скалярное поле, можно определить связанное с ним векторное поле. Также возможно и обратное. С точки зрения математической обработки скалярными полями оперировать легче, чем векторными, так как они задаются одной функцией координат, в то время как векторное поле требует три функции, соответствующие компонентам вектора в трех направлениях. Таким образом, возникает вопрос: дано векторное поле, может ли мы записать связанное с ним скалярное поле?
Дивергенция и ротор.
Мы видели результат действия С на скалярную функцию. Что произойдет, если С применить к вектору? Имеются две возможности: пусть U (x, y, z) – вектор; тогда мы можем образовать векторное и скалярное произведения следующим образом:
Первое из этих выражений – скаляр, называемый дивергенцией U (обозначается divU); второе – вектор, названный ротор U (обозначается rotU).
Эти дифференциальные функции, дивергенция и ротор, широко используются в математической физике.
Представьте, что U – некоторый вектор и что он и его первые производные непрерывны в некоторой области. Пусть P – точка в этой области, окруженная малой замкнутой поверхностью S, ограничивающей объем D V. Пусть n – единичный вектор, перпендикулярный к этой поверхности в каждой точке (n меняет направление при движении вокруг поверхности, но всегда имеет единичную длину); пусть n направлен наружу. Покажем, что


Здесь S указывает, что эти интегралы берутся по всей поверхности, da – элемент поверхности S.
Для простоты мы выберем удобную для нас форму S в виде небольшого параллелепипеда (как показано на рис. 12) со сторонами D x, D y и D z; точка P – центр параллелепипеда. Вычислим интеграл из уравнения (4) сначала по одной грани параллелепипеда. Для передней грани n = i (единичный вектор параллелен оси x); D a = D y D z. Вклад в интеграл от передней грани равен

На противоположной грани n = –i; эта грань дает вклад в интеграл
Используя теорему Тейлора, получим общий вклад от двух граней

Заметим, что D x D y D z = D V. Аналогичным образом можно вычислить вклад от двух других пар граней. Полный интеграл равен

и если мы положим D V ® 0, то члены более высокого порядка исчезнут. По формуле (2) выражение в скобках – это divU, что доказывает равенство (4).
Равенство (5) можно доказать таким же образом. Воспользуемся снова рис. 12; тогда вклад от передней грани в интеграл будет равен

и, используя теорему Тейлора, получим, что суммарный вклад в интеграл от двух граней имеет вид
т.е. это два члена из выражения для rotU в уравнении (3). Другие четыре члена получатся после учета вкладов от других четырех граней.
Что, в сущности, означают эти соотношения? Рассмотрим равенство (4). Предположим, что U – скорость (жидкости, например). Тогда n Ч U da = Un da, где Unявляется нормальной компонентой вектора U к поверхности. Поэтому, Un da – это объем жидкости, протекающей через da в единицу времени, а – это объем жидкости, вытекающей через S в единицу времени. Следовательно,
– это объем жидкости, вытекающей через S в единицу времени. Следовательно,

– скорость расширения единицы объема вокруг точки P. Отсюда дивергенция получила свое название; она показывает скорость, с которой жидкость расширяется из (т.е. расходится от) P.
Чтобы объяснить физическое значение ротора U, рассмотрим другой поверхностный интеграл по маленькому цилиндрическому объему высотой h, окружающему точку P; плоско-параллельные поверхности могут быть ориентированы в любом направлении, которое мы выбираем. Пусть k –единичный вектор перпендикулярный к каждой поверхности, и пусть площадь каждой поверхности D A; тогда полный объем D V = h D A (рис. 13). Рассмотрим теперь интеграл
Подынтегральное выражение – уже упоминавшееся ранее тройное скалярное произведение. Это произведение будет равно нулю на плоских поверхностях, где k и n параллельны. На кривой поверхности

где ds – элемент кривой как показано на рис. 13. Сравнивая эти равенства с соотношением (5), получаем, что

Мы по-прежнему предполагаем, что U – скорость. Чему в таком случае будет равна средняя угловая скорость жидкости вокруг k? Очевидно, что

если D A ® 0. Это выражение максимально, когда k и rotU указывают в одном и том же направлении; это означает, что rotU – вектор, равный удвоенной угловой скорости жидкости в точке P. Если жидкость вращается относительно P, то rotU № 0, и векторы U будут вращаться вокруг P. Отсюда и возникло название ротора.
Теорема дивергенции (теорема Остроградского – Гаусса)
Теорема дивергенции (теорема Остроградского – Гаусса) является обобщением формулы (4) для конечных объемов. Она утверждает, что для некоторого объема V, ограниченного замкнутой поверхностью S,

и справедлива для всех непрерывных векторных функций U, имеющих непрерывные первые производные всюду в V и на S. Мы не будем приводить здесь доказательство этой теоремы, но ее справедливость можно понять интуитивно, представляя объем V разделенным на ячейки. Поток U через поверхность, общую для двух ячеек обращается в нуль, и только ячейки, находящиеся на границе S внесут вклад в поверхностный интеграл.
Теорема Стокса
является обобщением уравнения (6) для конечных поверхностей. Она утверждает, что

где C – замкнутая кривая и S – любая поверхность, ограниченная этой кривой. U и ее первые производные должны быть непрерывны всюду на S и C.
Александров П.С. Лекции по аналитической геометрии. М., 1968
Погорелов А.В. Аналитическая геометрия, 3 изд. М., 1968



