Кинематика

Механика — это раздел физики, изучающий механическое движение тел.
Кинематика — это раздел механики, в котором изучается механическое движение тел без учета причин, вызывающих это движение.
Материальная точка — тело, обладающее массой, размерами которого в данной задаче можно пренебречь, если
Система отсчета — это тело отсчета, связанная с ним система координат и прибор для измерения времени.
Траектория — это линия, которую описывает тело при своем движении.
Путь — это скалярная величина, равная длине траектории.
Перемещение — это вектор, соединяющий начальное положение тела с его конечным положением за данный промежуток времени.
Важно!
В процессе движения путь может только увеличиваться, а перемещение как увеличиваться, так и уменьшаться, например, когда тело поворачивает обратно.
При прямолинейном движении в одном направлении путь равен модулю перемещения, а при криволинейном — путь больше перемещения.
Перемещение на замкнутой траектории равно нулю.
Основная задача механики — определить положение тела в пространстве в любой момент времени.
Механическое движение и его виды
Механическое движение — это изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение может быть:
1. по характеру движения
2. по виду траектории
Относительность механического движения
Относительность движения — это зависимость характеристик механического движения от выбора системы отсчета.
Правило сложения перемещений
Перемещение тела относительно неподвижной системы отсчета равно векторной сумме перемещения тела относительно подвижной системы отсчета и перемещения подвижной системы отсчета относительно неподвижной системы отсчета:
где \( S \) — перемещение тела относительно неподвижной системы отсчета;
\( S_1 \) — перемещение тела относительно подвижной системы отсчета;
\( S_2 \) — перемещение подвижной системы отсчета относительно неподвижной системы отсчета.
Правило сложения скоростей
Скорость тела относительно неподвижной системы отсчета равна векторной сумме скорости тела относительно подвижной системы отсчета и скорости подвижной системы отсчета относительно неподвижной системы отсчета:
где \( v \) — скорость тела относительно неподвижной системы отсчета;
\( v_1 \) — скорость тела относительно подвижной системы отсчета;
\( v_2 \) — скорость подвижной системы отсчета относительно неподвижной системы отсчета.
Относительная скорость
Важно! Чтобы определить скорость одного тела относительно другого, надо мысленно остановить то тело, которое мы принимаем за тело отсчета, а к скорости оставшегося тела прибавить скорость остановленного, изменив направление его скорости на противоположное.
Пусть \( v_1 \) — скорость первого тела, а \( v_2 \) — скорость второго тела.
Определим скорость первого тела относительно второго \( v_ <12>\) :

Определим скорость второго тела относительно первого \( v_ <21>\) :

Следует помнить, что траектория движения тела и пройденный путь тоже относительны.
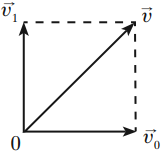
Если скорости направлены перпендикулярно друг к другу, то относительная скорость рассчитывается по теореме Пифагора:
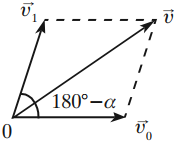
Если скорости направлены под углом \( \alpha \) друг к другу, то относительная скорость рассчитывается по теореме косинусов:

Скорость
Скорость — это векторная величина, характеризующая изменение перемещения данного тела относительно тела отсчета с течением времени.
Обозначение — \( v \) , единицы измерения — м/с (км/ч).

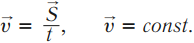
Средняя скорость — это векторная величина, равная отношению всего перемещения к промежутку времени, за которое это перемещение произошло:

Средняя путевая скорость — это скалярная величина, равная отношению всего пути, пройденного телом, к промежутку времени, за которое этот путь пройден:

Важно! Чтобы определить среднюю скорость на всем участке пути, надо время разделить на отдельные промежутки и все время представить в виде суммы этих промежутков.
Чтобы определить среднюю скорость за все время движения, надо путь разделить на отдельные участки и весь путь представить как сумму этих участков.
Мгновенная скорость — это скорость тела в данный момент времени или в данной точке траектории.
Мгновенная скорость направлена по касательной к траектории движения.
Ускорение
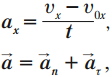
Ускорение – это векторная физическая величина, характеризующая быстроту изменения скорости.

где \( v \) – конечная скорость; \( v_0 \) – начальная скорость;
\( t \) – промежуток времени, за который произошло изменение скорости.
В проекциях на ось ОХ:
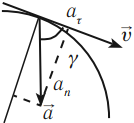
где \( a_n \) – нормальное ускорение, \( a_ <\tau>\) – тангенциальное ускорение.
Тангенциальное ускорение сонаправлено с вектором линейной скорости, а значит, направлено вдоль касательной к кривой:

Нормальное ускорение перпендикулярно направлению вектора линейной скорости, а значит, и касательной к кривой:

Ускорение характеризует быстроту изменения скорости, а скорость – векторная величина, которая имеет модуль (числовое значение) и направление.
Важно!
Тангенциальное ускорение характеризует быстроту изменения модуля скорости. Нормальное ускорение характеризует быстроту изменения направления скорости.
Если \( a_ <\tau>\) ≠ 0, \( a_n \) = 0, то тело движется по прямой;
если \( a_ <\tau>\) = 0, \( a_n \) = 0, \( v \) ≠ 0, то тело движется равномерно по прямой;
если \( a_ <\tau>\) = 0, \( a_n \) ≠ 0, тело движется равномерно по кривой;
если \( a_ <\tau>\) = 0, \( a_n \) = const, то тело движется равномерно по окружности;
если \( a_ <\tau>\) ≠ 0, \( a_n \) ≠ 0, то тело движется неравномерно по окружности.
Равномерное движение
Равномерное движение – это движение, при котором тело за любые равные промежутки времени совершает равные перемещения.
Скорость при равномерном движении – величина, равная отношению перемещения к промежутку времени, за которое это перемещение произошло:
Проекция вектора скорости на ось ОХ:
Проекция вектора скорости на координатную ось равна быстроте изменения данной координаты:
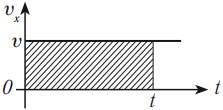
График скорости (проекции скорости)
График скорости (проекции скорости) представляет собой зависимость скорости от времени:
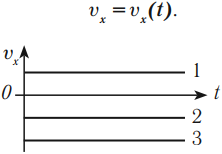
График скорости при равномерном движении – прямая, параллельная оси времени.
График 1 лежит над осью \( t \) , тело движется по направлению оси ОХ.
Графики 2 и 3 лежат под осью \( t \) , тело движется против оси ОХ.
Перемещение при равномерном движении – это величина, равная произведению скорости на время:

Проекция вектора перемещения на ось ОХ:

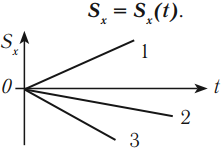
График перемещения (проекции перемещения)
График перемещения (проекции перемещения) представляет собой зависимость перемещения от времени:
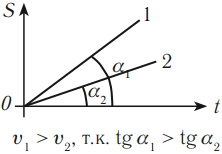
Координата тела при равномерном движении рассчитывается по формуле:
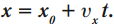
График координаты представляет собой зависимость координаты от времени: \( x=x(t) \) .
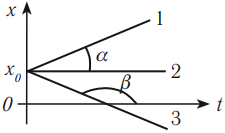
График координаты при равномерном движении – прямая.
График 1 направлен вверх, тело движется по направлению оси ОХ:

График 2 параллелен оси ОХ, тело покоится.
График 3 направлен вниз, тело движется против оси ОХ:

Прямолинейное равноускоренное движение
Прямолинейное равноускоренное движение – это движение по прямой, при котором тело движется с постоянным ускорением:

При движении с ускорением скорость может как увеличиваться, так и уменьшаться.
Скорость тела при равноускоренном движении рассчитывается по формуле:
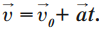
При разгоне (в проекциях на ось ОХ):

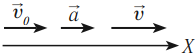
При торможении (в проекциях на ось ОХ):

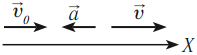
График ускорения (проекции ускорения) при равноускоренном движении представляет собой зависимость ускорения от времени:
График ускорения при равноускоренном движении – прямая, параллельная оси времени.
График 1 лежит над осью t, тело разгоняется, \( a_x \) > 0.
График 2 лежит под осью t, тело тормозит, \( a_x \) \( v_ <0x>\) > 0, \( a_x \) > 0.

График 2 направлен вниз, тело движется равнозамедленно в положительном направлении оси ОХ, \( v_ <0x>\) > 0, \( a_x \) \( v_ <0x>\) \( a_x \) \( t_2-t_1 \) . Для этого необходимо определить площадь фигуры под графиком (заштрихованной фигуры).
Перемещение при равноускоренном движении рассчитывается по формулам:
Перемещение в \( n \) -ую секунду при равноускоренном движении рассчитывается по формуле:
Координата тела при равноускоренном движении рассчитывается по формуле:
Свободное падение (ускорение свободного падения)
Свободное падение – это движение тела в безвоздушном пространстве под действием только силы тяжести.
Все тела при свободном падении независимо от массы падают с одинаковым ускорением, называемым ускорением свободного падения.
Ускорение свободного падения всегда направлено к центру Земли (вертикально вниз).
Движение тела по вертикали
Тело падает вниз, вектор скорости направлен в одну сторону с вектором ускорения свободного падения:

Если тело падает вниз без начальной скорости, то \( v_0 \) = 0.
Время падения рассчитывается по формуле:

Тело брошено вверх:

Если брошенное вверх тело достигло максимальной высоты, то \( v \) = 0.
Время подъема рассчитывается по формуле:

Движение тела, брошенного горизонтально
Движение тела, брошенного горизонтально, можно представить как суперпозицию двух движений:
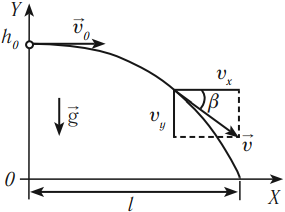


Скорость тела в любой момент времени:
Угол между вектором скорости и осью ОХ:
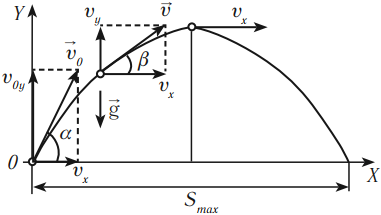
Движение тела, брошенного под углом к горизонту (баллистическое движение)
Движение тела, брошенного под углом к горизонту, можно представить как суперпозицию двух движений:

Скорость тела в любой момент времени:
Угол между вектором скорости и осью ОХ:
Время подъема на максимальную высоту:

Максимальная высота подъема:
Максимальная дальность полета:
Важно!
При движении вверх вертикальная составляющая скорости будет уменьшаться, т. е. тело вдоль вертикальной оси движется равнозамедленно.
При движении вниз вертикальная составляющая скорости будет увеличиваться, т. е. тело вдоль вертикальной оси движется равноускоренно.
Скорость \( v_0 \) , с которой тело брошено с Земли, будет равна скорости, с которой оно упадет на Землю. Угол \( \alpha \) , под которым тело брошено, будет равен углу, под которым оно упадет.
При решении задач на движение тела, брошенного под углом к горизонту, важно помнить, что в точке максимального подъема проекция скорости на ось ОУ равна нулю:

Это облегчает решение задач:

Движение по окружности с постоянной по модулю скоростью
Движение по окружности с постоянной по модулю скоростью – простейший вид криволинейного движения.
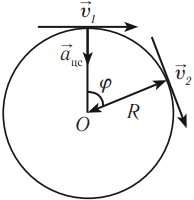
Траектория движения – окружность. Вектор скорости направлен по касательной к окружности.
Модуль скорости тела с течением времени не изменяется, а ее направление при движении по окружности в каждой точке изменяется, поэтому движение по окружности – это движение с ускорением.
Ускорение, которое изменяет направление скорости, называется центростремительным.
Центростремительное ускорение направлено по радиусу окружности к ее центру.

Движение тела по окружности с постоянной по модулю скоростью является периодическим движением, т. е. его координата повторяется через равные промежутки времени.
Период – это время, за которое тело совершает один полный оборот.
Обозначение – \( T \) , единицы измерения – с.

где \( N \) – количество оборотов, \( t \) – время, за которое эти обороты совершены.
Частота вращения – это число оборотов за единицу времени.
Обозначение – \( \nu \) , единицы измерения – с –1 (Гц).

Период и частота – взаимно обратные величины:
Линейная скорость – это скорость, с которой тело движется по окружности.
Обозначение – \( v \) , единицы измерения – м/с.
Линейная скорость направлена по касательной к окружности:


Направление угловой скорости можно определить по правилу правого винта (буравчика).
Если вращательное движение винта совпадает с направлением движения тела по окружности, то поступательное движение винта совпадает с направлением угловой скорости.
Связь различных величин, характеризующих движение по окружности с постоянной по модулю скоростью:

Важно!
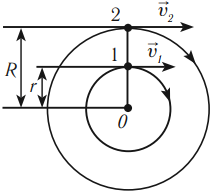
При равномерном движении тела по окружности точки, лежащие на радиусе, движутся с одинаковой угловой скоростью, т. к. радиус за одинаковое время поворачивается на одинаковый угол. А вот линейная скорость разных точек радиуса различна в зависимости от того, насколько близко или далеко от центра они располагаются:

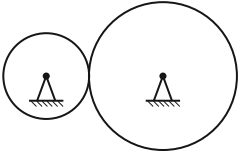
Если рассматривать равномерное движение двух сцепленных тел, то в этом случае одинаковыми будут линейные скорости, а угловые скорости тел будут различны в зависимости от радиуса тела:

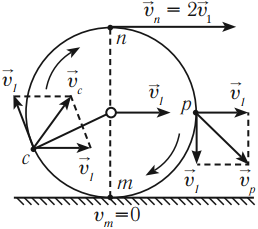
Мгновенная скорость нижней точки \( (m) \) равна нулю, мгновенная скорость в верхней точке \( (n) \) равна удвоенной скорости \( v_1 \) , мгновенная скорость точки \( (p) \) , лежащей на горизонтальном радиусе, рассчитывается по теореме Пифагора, а мгновенная скорость в любой другой точке \( (c) \) – по теореме косинусов.
2.7. Движение тела, брошенного под углом к горизонту

Рис. 2.16. Движение тела, брошенного под углом к горизонту
Вывод уравнений движения материальной точки в поле силы тяжести
Напишем уравнение движения (уравнение второго закона Ньютона):

Как уже было сказано, мы учитываем только силу тяжести  .
.
Масса тела в уравнении движения сокращается

это означает, что тела — материальные точки — любых масс при одних и тех же начальных условиях будут двигаться в однородном поле тяжести одинаково. Спроектируем уравнение (2.7.2) на оси декартовой системы координат. Горизонтальная ось ОХ показана на рис. 13 пунктиром, ось OY проведем через точку О вертикально вверх, а горизонтальную ось OZ, также проходящую через точку О, направим перпендикулярно вектору  на нас. Получаем:
на нас. Получаем:
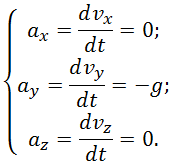
Вертикальным направлением, по определению, называется направление вектора  , поэтому его проекции на горизонтальные оси OX и OY равны нулю. Во втором уравнении учтено, что вектор направлен вниз, а ось OY — вверх.
, поэтому его проекции на горизонтальные оси OX и OY равны нулю. Во втором уравнении учтено, что вектор направлен вниз, а ось OY — вверх.
.png)
Рис. 2.17. Движение тела, брошенного под углом к горизонту.
Добавим к уравнениям движения начальные условия, которые определяют положение и скорость тела в начальный момент времени t0, пусть t0 = 0. Тогда, согласно рис. 2.7.4
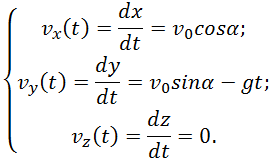
Или в проекциях на оси координат:
Если производная некоторой функции равна нулю, то функция постоянна, соответственно из первого и третьего уравнений (2.7.3) получаем:
Константы находятся из начальных условий, а именно: из первого и третьего уравнений (2.7.5) следует, что в любой момент времени
Во втором уравнении (2.7.3) производная равна константе, откуда следует, что функция зависит от своего аргумента линейно, то есть

Эта константа также находится из начальных условий. Подставляя в (2.7.8) t = 0 и сравнивая результат (vy(0) = const) cо вторым уравнением в (2.7.5) получаем

Объединяя (2.7.7) и (2.7.9), получаем окончательные выражения для зависимостей проекций скорости на оси координат от времени:
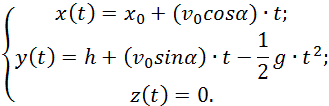
Для определения зависимостей от времени координат тела необходимо выполнить еще одно интегрирование — проинтегрировать по времени уравнения (2.7.10) с учетом начальных условий (2.7.5). Используя ту же логику: если производная равна нулю, то функция постоянна, если производная постоянна, то функция зависит от своего аргумента линейно, и подбирая константы так, чтобы удовлетворить начальные условия, можно получить следующий результат:
Третье уравнение (2.7.11) показывает, что траектория тела плоская, целиком лежит в плоскости XOY, это вертикальная плоскость, определяемая векторами и . Очевидно, что последнее утверждение общее: как бы ни были выбраны направления осей координат, траектория тела брошенного под углом к горизонту плоская, она всегда лежит в плоскости, определяемой вектором начальной скорости и вектором ускорения свободного падения .
Если три уравнения (2.7.10) умножить на орты осей  ,
,  , и
, и  и сложить, а потом то же самое проделать с тремя уравнениями (2.7.11), то мы получим зависимости от времени вектора скорости частицы и её радиус вектора. С учетом начальных условий имеем:
и сложить, а потом то же самое проделать с тремя уравнениями (2.7.11), то мы получим зависимости от времени вектора скорости частицы и её радиус вектора. С учетом начальных условий имеем:

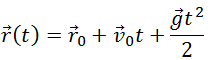
Формулы (2.7.12) и (2.7.13) можно было получить сразу, непосредственно из (2.7.2), если учесть, что ускорение свободного падения есть постоянный вектор. Если ускорение — производная от вектора скорости — постоянно, то вектор скорости зависит от времени линейно, а радиус-вектор, производная по времени от которого и есть линейно зависящий от времени вектор скорости, зависит от времени квадратично. Это и записано в соотношениях (2.7.12) и (2.7.13) с константами — постоянными векторами — подобранными соответственно начальным условиям в форме (2.7.4).
Из (2.7.13) в частности видно, что радиус-вектор является суммой трех векторов, складывающихся по обычным правилам, что наглядно показано на рис. 2.18.

Рис. 2.18. Представление радиус-вектора r(t) в произвольный момент времени t в виде суммы трех векторов
Эти векторы представляют собой:
Здесь отчетливо проявляется принцип независимости движений, известный в других областях физики как принцип суперпозиции (наложения). Вообще говоря, согласно принципу суперпозиции результирующий эффект нескольких воздействий представляет собой сумму эффектов от каждого воздействия в отдельности. Он является следствием линейности уравнений движения.
Видео 2.3. Независимость горизонтального и вертикального перемещений при движении в поле тяжести.
Поместим начало отсчета в точку бросания. Теперь  =0, оси, как и ранее, развернем так, чтобы ось 0x была горизонтальной, ось 0у — вертикальной, а начальная скорость
=0, оси, как и ранее, развернем так, чтобы ось 0x была горизонтальной, ось 0у — вертикальной, а начальная скорость  лежала в плоскости х0у (рис. 2.19).
лежала в плоскости х0у (рис. 2.19).

Рис. 2.19. Проекции начальной скорости на координатные оси
Спроецируем  на оси координат (см.(2.7.11)):
на оси координат (см.(2.7.11)):


Траектория полета. Если из системы полученных уравнений исключить время t, то получим уравнение траектории:
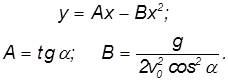
Это уравнение параболы, ветви которой направлены вниз.
Дальность полета при стрельбе с высоты h. В момент падения тела  (снаряд попадает в цель, находящуюся на поверхности моря). Расстояние по горизонтали от пушки до цели равно при этом
(снаряд попадает в цель, находящуюся на поверхности моря). Расстояние по горизонтали от пушки до цели равно при этом  . Подставляя ;
. Подставляя ;  в уравнение траектории, получаем квадратное уравнение для дальности полета
в уравнение траектории, получаем квадратное уравнение для дальности полета  :
:
У квадратного уравнения имеется два решения (в данном случае — положительное и отрицательное). Нам нужно положительное решение. Стандартное выражение для корня квадратного уравнения нашей задачи может быть приведено к виду:
При  отсюда получается известная формула школьного курса физики
отсюда получается известная формула школьного курса физики
Из нее следует, в частности, что максимальная дальность полета

достигается при  , если h = 0.
, если h = 0.
Максимальная дальность полета. При выстреле с горы высотой  это уже не так. Найдем угол
это уже не так. Найдем угол  , при котором достигается максимальная дальность полета. Зависимость дальности полета
, при котором достигается максимальная дальность полета. Зависимость дальности полета  от угла
от угла  достаточно сложна, и вместо дифференцирования для нахождения максимума мы поступим следующим образом. Представим себе, что мы увеличиваем начальный угол . Сначала дальность полета растет (см. формулу (2.7.15)), достигает максимального значения
достаточно сложна, и вместо дифференцирования для нахождения максимума мы поступим следующим образом. Представим себе, что мы увеличиваем начальный угол . Сначала дальность полета растет (см. формулу (2.7.15)), достигает максимального значения  и снова начинает падать (до нуля при выстреле вертикально вверх). Таким образом, для каждой дальности полета, кроме максимальной, соответсвует два направления начальной скорости.
и снова начинает падать (до нуля при выстреле вертикально вверх). Таким образом, для каждой дальности полета, кроме максимальной, соответсвует два направления начальной скорости.
Обратимся снова к квадратному уравнению относительности дальности полета и рассмотрим его как уравнение для угла  . Учитывая, что
. Учитывая, что
перепишем его в виде:
Мы снова получили квадратное уравнение, на этот раз — для неизвестной величины  . Уравнение имеет два корня, что соответствует двум углам, при которых дальность полета равна
. Уравнение имеет два корня, что соответствует двум углам, при которых дальность полета равна  . Но когда
. Но когда  , оба корня должны совпасть. Это означает, что равен нулю дискриминант квадратного уравнения:
, оба корня должны совпасть. Это означает, что равен нулю дискриминант квадратного уравнения:
откуда следует результат
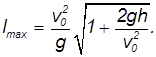
При  этот результат воспроизводит формулу (2.7.16)
этот результат воспроизводит формулу (2.7.16)

Обычно высота  много меньше дальности полета
много меньше дальности полета  на равнине. При
на равнине. При  квадратный корень может быть аппроксимирован первыми членами разложения в ряд Тейлора и мы получаем приближенное выражение
квадратный корень может быть аппроксимирован первыми членами разложения в ряд Тейлора и мы получаем приближенное выражение

то есть дальность выстрела увеличивается примерно на высоту подъема пушки.
Когда l = lmax, и a = amax, как уже отмечалось, дискриминант квадратного уравнения равен нулю, соответственно, его решение имеет вид:
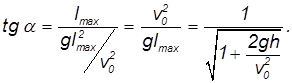
Поскольку тангенс меньше единицы, угол, при котором достигается максимальная дальность полета, меньше  .
.
Максимальная высота подъёма над начальной точкой. Эта величина может быть определена из равенства нулю вертикальной составляющей скорости в верхней точке траектории
При этом горизонтальная составляющая скорости  не равна нулю, поэтому
не равна нулю, поэтому

Дифференцируя ранее полученное уравнение траектории, приходим к уравнению:
что при подстановке в уравнение траектории полета приводит к формуле:
Продолжительность полета. Поскольку горизонтальная составляющая скорости не меняется, то продолжительность полета  определяется как отношение дальности полета к горизонтальной составляющей начальной скорости, то есть
определяется как отношение дальности полета к горизонтальной составляющей начальной скорости, то есть

При  получаем
получаем
При  (пушка стреляет в горизонтальном направлении) время полета
(пушка стреляет в горизонтальном направлении) время полета

равно времени падения тела с высоты  . Дальность полета при этом
. Дальность полета при этом
Путь, пройденный телом. За время t тело проходит путь

Интеграл берется в элементарных функциях, но из-за громоздкости ответа мы не выписываем здесь соответствующее выражение.
Расстояние от места выстрела. К моменту времени t расстояние от места выстрела определяется модулем радиус-вектора:

Радиус кривизны траектории в заданной точке. В отсутствие сопротивления воздуха тело движется с постоянным ускорением силы тяжести  , которое и является полным ускорением.
, которое и является полным ускорением.
Тангенциальная компонента ускорения, характеризующая быстроту изменения модуля скорости, равна
Нормальная компонента ускорения, изменяющая направление скорости тела, определяется соотношением:

Используя связь нормальной компоненты ускорения с радиусом кривизны, находим  :
:
В числителе этого выражения в степени 3/2 стоит модуль скорости. Поэтому, даже не вычисляя производной, мы можем ответить на вопрос, в какой точке траектории кривизна максимальна, а радиус кривизны C = 1/R минимален. Радиус кривизны R достигает минимума там, где минимальна скорость, а это имеет место в верхней точке траектории, в которой вертикальная компонента скорости равна нулю:

Еще раз напомним, что горизонтальная компонента скорости, всюду имеет одно и то же значение. В верхней точке модуль скорости равен горизонтальной составляющей скорости
Для сравнения: радиус кривизны  в начальный момент
в начальный момент  равен
равен
Положение центра кривизны (для высшей точки траектории). По определению радиуса кривизны центр кривизны для высшей точки траектории находится прямо под этой точкой на высоте

Напомним, что мы отсчитываем вертикальные расстояния от уровня пушки, а не от уровня моря.

эта координата отрицательна, то есть центр кривизны находится ниже пушки. Максимально высокое положение центр кривизны занимает при  :
:
что совпадает с верхней точкой траектории. Тогда радиус кривизны равен нулю. Это значит, что кривизна в этой точке бесконечна, в чем легко убедиться, представив себе траекторию при вертикальном движении снаряда.



