время дифференцирования
время предварения
время дифференцирования
Время, в течение которого входной сигнал, изменяющийся с постоянной скоростью, достигнет значения выходного сигнала, изменяющегося с той же скоростью, в момент начала отсчета.
[ГОСТ 9988-84]
derivative action time
for a derivative element the same as the derivative action coefficient, if its input and output variables have the same unit
Note 1 – Then the derivative action time is given by TD = KD, where KD is the derivative action coefficient.
Note 2 – The derivative action time can also be given as the duration of the time interval that a rampwise variation of the input variable needs to reach the same value as the stepwise varying output variable.
[IEV ref 351-28-26]
constante de temps de dérivation
pour un élément à action par dérivation, la constante de temps de dérivation est égale au coefficient d’action par dérivation, si ses variables d’entrée et de sortie sont dans la même unité
Note 1 – La constante de temps de dérivation est alors donnée par TD = KD, où KD est le coefficient d’action par dérivation.
Note 2 – La constante de temps de dérivation peut également être donnée comme la durée de l’intervalle de temps nécessaire pour qu’une variation en rampe de la variable d’entrée atteigne la même valeur que la variable de sortie correspondante.
[IEV ref 351-28-26]
ПИД-регулятор своими руками
I. Постановка задачи
II. Теоретическая вводная
Как получается ПИД-регулятор? Берём разницу между текущей температурой и нужной, умножаем на настраиваемый коэффициент, получаем мощность, которую надо выдать в данный момент. Это пропорциональная составляющая, она работает в момент появления рассогласования — то есть моментально откликается как на изменение уставки, так и на поведение объекта. Начал подогреваться? Мощность начинает спадать. Перегрелся? Выключилось, или даже дали сигнал охлаждения. Всё хорошо, вот только в реальной жизни эффект от воздействия проявляется с запаздыванием, а на объект воздействуем не только мы, но еще и окружающая среда: разогретый реактор не только внутри горячий, но еще и остывает, отдавая тепло комнате, а потому как только выключаем мощность, он сразу начинает остывать. Поэтому чистый пропорциональный регулятор колеблется вокруг точки поддержания, и тем сильнее колеблется, чем выше воздействие окружающей среды / содержимого реактора.
Чтобы компенсировать «внешние» воздействия на реактор, в цепь добавляют интегральную составляющую. Всё рассогласование, которое было в системе, идёт на интегратор (соответственно, как только мы перегрели — сумма уменьшается, пока недогрето — сумма увеличивается). И накопленный интеграл, со своим коэффициентом, даёт свою прибавку-убавку к мощности. В результате такого подхода, при стационарном процессе, через некоторое время интеграл подбирает такой вклад в сумму с мощностью, который компенсирует потери окружающей среды, и колебания исчезают — интеграл становится стабильным, поэтому величина выдаваемой мощности становится постоянной. Причем так как при этом держится нужная температура, рассогласование отсутствует, пропорциональная составляющая не работает вообще.
Для компенсации влияния задержек между воздействием и реакцией системы, в систему добавляют дифференциальную составляющую. Просто пропорциональный регулятор даёт мощность всё время, пока температура не достигнет нужной точки, пропорционально-дифференциальный начинает снижать подаваемую мощность раньше, чем догрелся до нужной точки — так как рассогласование уменьшается, имеется наличие отрицательной производной, уменьшающей воздействие. Это позволяет минимизировать перегрев при больших переходах.
Итак, с физическим смыслом разобрались, перейдём к основым вопросам реализации.
III. Кому пользоваться регулятором?
Что из этого следует? Из этого следует, что техники понимают физическую составляющую, и имеют опыт настройки аппаратных пид регуляторов. А значит, программная реализация должна исходить из удобства настройки техниками — повторяя физическую модель. И это крайне важно! Очень часто в угоду упрощения кода коэффициенты меняют, например, на обратные — чтобы избавиться от деления. В результате, настройка превращается в ад и кошмар, и требуется опыт настройки данного конкретного регулятора, вместо понимания процесса. Отсюда получаем, что наши коэффициенты — постоянная интегрирования и постоянная дифференцирования — должны иметь размерность времени, то есть задаваться в секундах, а никак не в «1/с», как это любят делать.
IV. Область функционирования.
1200°C, управляется только подача мощности.
Точность управления определяется во-1х точностью измерения: градуировочные таблицы даны через 0.1 градуса; линейность внутри таблиц в принципе достойная, поэтому точность ограничена в первую очередь усилителем и измерителем тока. В моём случае, хотелось добиться точности поддержания 0.1 градуса, поэтому измеритель настроен на 1/32 градуса: это даёт
V. Диапазон настраиваемости.
Для управления микрореактором с мощной силовой установкой может оказаться что для нагрева на 10 градусов достаточно 1% мощности, в то время как для большой инертной печи для того чтобы подогреть на градус едва-едва хватает 100% мощности подогрева. (В реальной жизни, это выглядит так — есть несколько подогревателей с ручным управлением — они включаются отдельным рубильником и производят начальный нагрев, в дальнейшем поддержание рабочей точки обеспечивает терморегулятор, управляя еще одним подогревателем, который на полной мощности выдаёт максимум +10°C к тому, что нагрели постоянно включенные). Исходя из этого, предельным коэффициентом пропорциональности логично предположить 100% мощности на 1 градус. Больше не имеет смысла, так как мы хотим получить управляемость в 0.1 градуса. Минимальный, для простоты, я взял инверсным — 1% мощности на 100 градусов.
Диапазоны временных коэффициентов вычисляются просто исходя из наших условий работы регулятора. Так как мы управляем через мощностью симистор путём вычисления задержки момента включения после прохождения через 0, предельная частота работы регулятора — 50Гц. Если мы уверены, что управляем мощностью которой пофиг плюс или минус, мы можем работать на 100Гц, но это не всегда так, и потому лучше каждый раз дозировать равное количество как положительной так и отрицательной полуволны. Для упрощения жизни, я снизил время работы до 25Гц, тем самым любое вычисленное воздействие будет действовать в течение 4 полуволн, и за это время у меня будет возможность рассчитать новое воздействие.
Таким образом, постоянные времени задаются через 1/25 сек, от 0 до
2000 сек (2000*25 = 50000, как раз в 16бит влазит).
Ну и еще у нас есть ограничение мощности минимальное и максимальное, от 0 до 100%.
VI. Управление мощностью.
Начиная с этого момента все теоретические выкладки заканчиваются, начинается горькая практика, привязанная к конкретной реализации.
Итак, мы уже решили что управляем задержкой открывания симистора после прохождения через 0. Таким образом, задержка в 0 означает 100% мощность, бесконечная задержка = 0% мощности.
Вопрос: с какой точностью мы можем управлять мощностью? Вообще, с точностью отсчета времени нашего таймера. С другой стороны, какая нужна мощность? Мы вычисляем какой % мощности нужно подать на 0.04сек. В принципе, по опыту, управления мощностью даже с точностью в 1% на частоте в 0.1сек хватает для поддержания температуры в 1 градус. У нас управление 0.04сек (в 2.5раза быстрее). Поэтому было принято решение рассчитать таблицу мощности через 1/250 от максимума (с шагом в 0.4%). Это позволяет таблицу иметь не сильно большую (500 байт), и при этом иметь точность выше 1%. Если ваш случай требует бОльшей точности — пересчитать не так сложно.
Теперь поговорим о расчете этой самой таблицы. Во-1х следует учесть, что есть момент срабатывания сигнала прохождения через ноль. В моем случае — 12В. То есть когда входное напряжение упадёт ниже 12В, я получу сигнал прохождения через 0.
Это означает, что для 100% мощности время запуска = времени прохождения 12В.
Процессор у меня работает на частоте 32786, PLL настроен на 384/2, полуволна имеет 100Гц, откуда получаем, что код для загрузки константы в таймер для времени T имеет вид:
Нам нужно рассчитать время задержки, дающее равномерное увеличение площади включенной части синусоиды. То есть нам нужно иметь отсчеты времени, дающие равномерное увеличение мощности. Полная мощность, которую мы выдаём — это интеграл по всей синусоиде. [кто знает, как на хабре формулы вставлять? никак? пишу в maple-нотации тогда].
Таким образом, нам нужно пройтись по всем Q с заданной точностью, и для каждой из них найти T.
Я для себя это решил вот таким тупым способом:
Всё, на выходе мы получили табличку в 250 значений, соответствующих константам загрузки таймера до момента поджига после получения сигнала о прохождении через 0 (точнее, через 12В, как я говорил выше).
VII. Измерение входных данных
Я пропускаю этот вопрос, потому как он достоен отдельной большой статьи. О том, как я решал вопрос с термосопротивлением, можно найти в архиве почившего в бозе моего блога.
Главное что нам надо знать, это что мы измеряем данные с нужной нам частотой (в данном случае — 25Гц), и нужной точностью (на выходе — число от 0 до 2048 градусов кельвина через 1/32 градуса). Данные предполагаются уже нормализованные для всех дальнейших расчетов.
Если будет кому интересно — пишите в комментах, распишу в следующий раз как это делается для термопар.
VIII. Вычисление воздействия
И вот свершилось: у нас есть все данные для того, чтобы наконец-то произвести то, ради чего мы всё затевали: вычислить какую же мощность следует подать на управляющий элемент.
Вспомним еще раз формулу ПИД регулятора:
U = K * ( Err + (1/Ti)*Int + Td*dErr )
Мы снова пришли к вопросу, который поднимался в разделе III: этим будут пользоваться техники. Поэтомоу крайне важно не допустить классической ошибки всех реализаций — «размерности коэффициентов как получится». Мы делаем прибор для управления физическим процессом, а значит, модель должна соответствовать.
Вот теперь хорошо видно, зачем выносится за скобки пропорциональный коэффициент — это позволяет оставить диф и инт коэффициенты просто постоянными времени, в результате оператор при настройке оперирует простыми и понятными числами — процентом на градус для пропорциональной и секундами для интегральной и дифференциальной коэффициентами.
А благодаря удобному подбору положения точек и размерностей времени, как мы сейчас увидим, все расчеты производятся практически «в лоб».
Кроме одного — у нас есть величина Ti, а для расчета требуется 1/Ti. Операция деления большой разрядности — очень дорогая. Операция умножения в разы дешевле, поэтому воспользуемся отличной статьёй Division by Invariant Integers using Multiplication. У нас ведь K / Ti / Td меняются крайне редко, а потому мы можем себе позволить как угодно извращаться с ними после их изменения, главное чтобы основной цикл расчетов работал быстро.
Таким образом, вместо Ti для расчетов мы раскладываем в набор Ti_m, Ti_sh1, Ti_sh2; и на каждом цикле производим вычисление:
При всех расчетах положение точки вплоть до 7го шага остаётся на 5м справа месте. В последний момент происходит интересный финт ушами. K задаётся через 1/256, соответственно, после умножения точка сдвигается влево до 5+8=13 места, поэтому мы должны у результата отбросить младшие 8 бит. И самый нижний байт результата — нужная нам мощность через 2/5%. Это — еще одна причина, по которой мощность выровнена по шагам в 1/250 — это позволяет результат уложить в один байт и получить легко по таблице нужный результат.
Дальше, помним, что нас интересует мощность только от 0 до 250 — поэтому 7й шаг вычислений идёт очень просто, как только мы получаем отрицательное число — сразу складываем uMin. Как только выяснили что любой старший байт не ноль — сразу складываем uMax. И только если мощность складывается в диапазоне — производим проверку на меньше uMin или больше uMax.
Если вдруг кому интересно:
IX. Применение воздействия.
Итак, у нас есть рассчитанное воздействие, и наша задача — применить его. Для этого работает общий цикл работы с частотой 50Гц. На четном цикле — производится измерение и вычисление, на нечетном — применение воздействия. Таким образом, общая схема получается: выставлена мощность, через одну синусоиду производится измерение и вычисление, еще через одну — применение новой.
X. Подводные камни.
ПИД-регулятор. Методика настройки
2020-07-10  Промышленное
Промышленное  12 комментариев
12 комментариев
ПИД-регулятор (пропорционально-интегрально-дифференциальный) — устройство, с обратной связью, применяемое в автоматических системах управления для поддержания заданного значения параметра. Благодаря своей универсальности они широко применяются в различных технологических процессах.

Выходной сигнал регулятора определяется по следующей формуле:
u (t) = P + I + D = Kp e (t) + Ki ∫e (t) dt + Kd de (t)/dt
u (t) – выходной сигнал регулятора;
P – пропорциональная составляющая;
I – интегрирующая составляющая;
D – дифференцирующая составляющая;
Ki — интегральный коэффициент
Kd – дифференциальный коэффициент
e (t) – ошибка рассогласования
Задачи ПИД-регулятора в системах АСУ ТП
Основная задача ПИД регулятора состоит в поддержании определенного значения параметра технологического процесса на заданном уровне. То есть говоря простым языком, задача ПИД-регулятора заключается в том, чтобы учитывая полученные значения с датчиков (обратная связь) воздействовать на объект управления, плавно подводя регулируемое значение к заданным уставкам. Применение ПИД регуляторов целесообразно, а зачастую и единственно возможно в процессах, где необходима высокая точность переходных процессов, непрерывный контроль и регулирование заданных параметров, недопустимы значительные колебания в системе.
Сравнение ПИД –регулятора с позиционным регулированием
В системах АСУ ТП наибольшее распространение получили два типа регуляторов – двухпозиционный и ПИД.
Двухпозиционный регулятор наиболее простой в использовании и широко распространенный.
Данный тип регулятора сравнивает значение входной величины с заданным параметром уставки. Если значение измеренной величины ниже заданного значения уставки, регулятор включает исполнительное устройство, при превышении заданного значения, исполнительное устройство выключается. Для предотвращения слишком частого срабатывания устройства, в следствии колебаний системы и следовательно изменении значений, задается минимальный и максимальный порог срабатывания — гистерезис, или по другому зона нечувствительности, мертвая зона, дифференциал. Например, нам необходимо поддерживать температуру в 15°С. Если гистерезис задан 2°, то регулятор будет включать нагрев при 14°С и отключать соответственно при 16°С.
Так или иначе, при таком типе регулирования происходят незатухающие колебания, частота и амплитуда которых зависит от параметров системы. Поэтому данный метод обеспечивает хороший результат в системах, обладающих инерционностью и малым запаздыванием. В частности, такой метод широко применяется при регулировании температуры в нагревательных печах.
В отличии от двухпозиционного с помощью ПИД-регулятора удается свести колебания системы к минимуму, благодаря тому, что при таком методе регулирования учитываются различные значения системы — фактическая величина, заданное значение, разность, скорость. Это позволяет стабилизировать систему и добиться повышения точности в десятки раз по сравнению с двухпозиционным методом. Конечно, здесь многое зависит от правильно подобранных коэффициентов ПИД регулятора.
Составляющие ПИД-регулятора
В стандартном ПИД-регуляторе есть три составляющие и каждая из них по своему воздействует на управление.
Пропорциональная — P (t) = Kp * e (t)
Учитывает величину рассогласования заданного значения и фактического. Чем больше отклонения значения, тем больше будет выходной сигнал, то есть пропорциональная составляющая пытается компенсировать эту разницу.
Однако пропорциональный регулятор не способен компенсировать полностью ошибку рассогласования. Всегда будет присутствовать так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. При увеличении коэффициента пропорциональности Kp статическая ошибка уменьшается, но могут возникнуть автоколебания и снижение устойчивости системы.
Интегральная – I (t) = Ki ∫e (t) dt
Интегральная составляющая используется для устранения статической ошибки. Она складывает значение предыдущих ошибок рассогласования и компенсирует их, можно сказать, что учится на предыдущих ошибках. То есть ошибка рассогласования умножается на коэффициент интегрирования и прибавляется к предыдущему значению интегрирующего звена. При выходе системы на заданный режим, интегральная составляющая перестает изменяться и не оказывает какого-либо серьезного воздействия на систему. Физически интегральная составляющая представляет задержку реакции регулятора на изменение величины рассогласования, внося в систему некоторую инерционность, что может быть полезно для управления объектами c большой чувствительностью.
Дифференциальная – D (t) = Kd de (t)/dt
Дифференциальная составляющая учитывает скорость изменения регулируемой величины, противодействуя предполагаемым отклонениям, вызванными возмущениями системы или запаздыванием. И чем больше будет величина отклоняться от заданной, тем сильнее будет противодействие, оказываемое дифференциальной составляющей. То есть она предугадывает поведение системы в будущем. При достижении величины рассогласования постоянного значения дифференциальная составляющая перестает оказывать воздействие на управляющий сигнал.
На практике какая-либо из составляющих может не использоваться (чаще всего Д-дифференциальная) и тогда мы получаем П-регулятор, ПИ-регулятор.
Методика настройки ПИД-регулятора
Выбор алгоритма управления и его настройка является основной задачей в процессе проектирования и последующего удовлетворительного запуска агрегата в промышленную или иную эксплуатацию.
В основе методики лежит закон Циглера-Никольса, являющийся эмпирическим и основанным на использовании данных, полученных экспериментально на реальном объекте.
В результате ознакомления с методикой, а также при близком рассмотрении объектов регулирования, были выбраны формулы и коэффициенты ближе всего подходящие к реальному объекту регулирования.
Объект регулирования – камерная электрическая печь. Число зон регулирования от 24 до 40. Каждая зона есть набор электронагревателей. Материал нагревателей нихром. Тип — проволочные, навитые на керамические трубки.
Требования: поддержание температуры по зонам печи +/- 5С.
МЕТОДИКА:
Настройка пропорциональной компоненты (Xp)

Тο — начальная температура в системе;
Тsp — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Система должна находится в постоянном колебательном процессе, притом колебательный процесс незатухающий, где ∆T– характеристика колебания равная значению величины рассогласования (±10С, или как по заданию). Колебания должны быть одинаковы от Тsp.
После получения данной кривой на нашем объекте, засекаем время периода колебаний ʌt – полный период. Данное время есть характеристика системы, оборудования.
3. Используя полученные параметры рассчитываем Ти и Тд.
| Зона пропорциональности | Коэффициент передачи | Постоянная времени интегрирования | Постоянная времени дифференцирования | |
| П-регулятор | 2*PBs | 0.5*Xp | ||
| ПИ-регулятор | 2.2*PBs | 0.45*Xp | 0.83*ʌТ | |
| ПИД-регулятор | 1.67*PBs | 0.6*Xp | 0.5*ʌТ | 0.125*ʌТ |
Цифры в формулах для расчета коэффициентов ПИД-регулирования скорректированы на основе запуска камерной электрической печи в опытно-промышленную эксплуатацию. И конечно в зависимости от типа объекта регулирования могут незначительно меняться.
Вывод
Благодаря достаточно высоким получаемым результатам ПИД-регуляторы нашли широкое применение в системах автоматического управления.
При этом важно подчеркнуть, что настройка ПИД-регулятора является процессом довольно трудоемким и требует определенных знаний и индивидуального подхода для различных объектов управления.
Большая Энциклопедия Нефти и Газа
Постоянные времени дифференцирования и интегрирования регулируются сопротивлениями У. [3]
Постоянную времени дифференцирования Гд определим как время опережения выходной координатой приведенной входной координаты ( Юсвх) в установившемся режиме. [4]
Обычно постоянная времени дифференцирования Г42 значительно превосходит Ти, а также Г2в в случае интегратора или TOZ в случае сумматора, поэтому частотная погрешность в режиме дифференцирования оказывается наибольшей. [6]
Если постоянная времени дифференцирования выбирается такой, чтобы й) Кр7п4, то угол опережения регулятора будет составлять 77, а критическая частота будет еще выше. Однако фактический коэффициент усиления будет примерно 4 / Ср, так как максимальное значение КР в этом случае должно быть меньше, чем раньше. Желательно, чтобы регулятор имел большие значения / Ср, так как при этом уменьшается остаточная неравномерность и увеличивается быстродействие системы регулирования. [8]
Влияние постоянной времени дифференцирования на критическую частоту и максимальный коэффициент усиления для случая типового объекта рассматривается в следующем примере. Отметим, что в этом примере объект описывается уравнением четвертого порядка ( четыре постоянные времени), так как теоретически система с объектом третьего порядка ( три постоянные времени) может быть сделана абсолютно устойчивой, если постоянная времени дифференцирования больше наименьшей постоянной времени. [9]
Максимальная постоянная времени дифференцирования 1000 сек. [12]
Методика настройки цифрового ПИД-регулятора
Методика настройки цифрового ПИД-регулятора
Обычно, при использовании пропорционально-интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю. Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP – это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
| Рис. 4 |
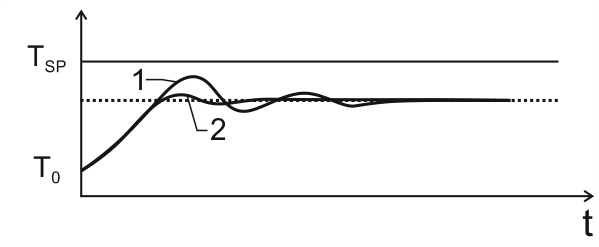 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти )
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.



