Виды запаздываний объектов управления. Звено чистого запаздывания.
Запаздывание процесса в объекте, которое может существенно мешать работе САР, во многих случаях поддается изменению. Например, САР трубы-сушилки значительно лучше работает, если вместо дозировочного стола под бункером и ленточного конвейера для подачи сырого угля применить ленточный питатель с регулируемой скоростью движения. При такой системе регулирования подачи сырого угля достигается за счет изменения скорости движения ленты. Транспортное запаздывание резко снижается.
Запаздывание процесса нейтрализации под действием CaS04 объясняется тем, что CaS04 заполняет пористое пространство породы, сокращая поверхность контакта между НС1 и карбонатными породами.
Запаздывание процесса перемагничивания стали от изменения тока в намагничивающей катушке называется магнитным гистерезисом. Рассмотренные кривые- называются петлей гистерезиса. Явление гистерезиса используется, в частности, в электротехнике, в машинах постоянного тока.
Корневой годограф для системы из четырех статических звеньев. Время запаздывания процесса характеризуется промежутком времени между мгновениями образования возмущения и начала соответствующего ему изменения регулируемого параметра в месте установки датчика регулятора. Например, при увеличении теплоотдачи каким-либо телом, находившимся в установившемся тепловом режиме, снижение температуры в месте установки термометра начинается с опозданием и с пониженной скоростью, не соответствующей образовавшемуся возмущению.
Время запаздывания процесса характеризуется промежутком времени между мгновениями образования возмущения и начала соответствующего ему изменения регулируемого параметра в месте установки чувствительного органа регулятора.
Эффекты запаздывания процесса выпучивания оболочек и пластинок при динамическом нагружении А.С. Вольмир объясняет влиянием сил инерции, соответствующих перемещениям при выпучивании.
Было выявлено запаздывание процессов понижения давления в блоке по сравнению с таким же процессом в трещине. Характерное время запаздывания процесса восстановления давления определяется на основе данных исследований скважин методом прослеживания за восстановлением забойного давления после ее закрытия, а также результатов, полученных методом установившихся отборов. Для этого необходимо решить обратную задачу теории упругого режима фильтрации в трещиноватой породе, для чего проще всего воспользоваться преобразованием Лапласа.Отставанием называют неиз бежное запаздывание процесса резки в нижних слоях металла по сравнению с верхними.Отставанием называют неиз бежное запаздывание процесса резки в нижних слоях металла по сравнению с верхними.
Если учесть, что запаздывание процесса регулирования по температуре значительно больше, чем в случае регулирования постоянного количества флегмы, то станет очевидным, что достигнуть хорошего качества регулирования последним способом значительно проще.
Переходным ( емкостным) запаздыванием процесса регулирования называется запаздывание, зависящее от тепловых, гидравлических и других сопротивлений между емкостями объекта и определяется как промежуток времени от момента возмущения до начала изменения регулируемой величины в результате преодоления указанных межъемкостных сопротивлений.
Переходным ( емкостным) запаздыванием процесса регулирования называется запаздывание, зависящее от тепловых, гидравлических и других сопротивлений между емкостями объекта. Переходное запаздывание определяется как промежуток времени от момента возмущения до начала изменения регулируемой величины в результате преодоления указанных межъемкостных сопротивлений. Переходное запаздывание практически характеризуется тем временем, которое потребуется на преодоление межъемкостных сопротивлений. Переходное запаздывание отрицательно сказывается на качестве регулирования.
Различают три понятия: время запаздывания процесса, время запаздывания регулятора и транспортное ( передаточное) запаздывание. Можно различать три понятия: время запаздывания процесса, время запаздывания регулятора и транспортное ( передаточное) запаздывание.Предиктор Смита эффективен в случаях, когда запаздывание процесса больше постоянной времени этого процесса.
Поэтому, в отличие от рассмотренных выше запаздываний процесса и регулятора, транспортное запаздывание зависит от нагрузки объекта: с ее увеличением оно уменьшается.
Одним из важнейших характеристик объектов являются емкость объекта и запаздывание процесса регулирования.
Звено чистого запаздывания
 .
.
Упрощения: 1) пусть волна идет только в сторону возрастания r;
2) если r = 0, то  ;
;
если r = l, то  .
.
Передаточная функция:  .
.
В качестве примера звена чистого запаздывания может служить транспортер:
Другим примером являются длинные линии.
Ввиду важности звена тиристорного преобразователя в системах автоматического управления электроприводами звено чистого запаздывания имеет несколько видов аппроксимации.
1)  .
.
 — коэффициент передачи тиристорного преобразователя.
— коэффициент передачи тиристорного преобразователя.
 — информационная постоянная времени системы управления (постоянная входного фильтра).
— информационная постоянная времени системы управления (постоянная входного фильтра).
Если первая гармоника входного сигнала одного порядка с частотой питающего напряжения, то сильно сказывается свойство полууправляемости тиристоров и чистое запаздывание необходимо принимать в рассмотрение. Данный эффект имеет место при наличии на входе системы высокочастотных помех. Заканчивается в течение периода питающего напряжения тиристорного преобразователя.
2)  где
где  . Получается в результате разложения
. Получается в результате разложения  в ряд Тейлора:
в ряд Тейлора:  . Если учесть только один член разложения, тогда
. Если учесть только один член разложения, тогда  .
.
3)  — тиристорный преобразователь представляется пропорциональным звеном.
— тиристорный преобразователь представляется пропорциональным звеном.
 Решение уравнения
Решение уравнения  дает бесконечное число нулей и полюсов.
дает бесконечное число нулей и полюсов.
Получили первый признак неминимальной фазовости – нули оказались в правой полуплоскости.
Рассмотрим частотные характеристики звена чистого запаздывания.

 ;
;  ;
;  ;
;  .
.

Рассмотрим очень медленный процесс. Переходная характеристика
Весовая функция  .
.

114. Техническое задание на проектирование.
Задание на проектирование устройств контроля и управления должно быть увязано с особенностями технологических процессов. Поэтому в задании должно быть дано четкое общее описание всех технологических процессов, по которым должны быть разработаны автоматические системы регулирования, защиты, блокировки, контроля и сигнализации с приложением поясняющих схем и перечней.
В задании указываются решения, принятые (или желательные) по следующим вопросам:
по общей организации управления проектируемого технологического объекта;
по использованию (или отказу от применения) информационных и управляющих вычислительных машин для централизованного контроля, расчетов технико-экономических показателей или управления технологическими процессами и агрегатами;
о степени автоматизации процессов пуска и останова производственных механизмов;
о местах измерений, характере применяемых приборов и местах расположения их по всем цехам, объектам и технологическим линиям;
об использовании новых, нетрадиционных средств контроля и управления.
Задание на проектирование дополняется:
технологическими чертежами (технологическими и тепловыми схемами, планами и разрезами цехов);
технической документацией на технологическое оборудование (паспортными данными и основными характеристиками оборудования станции);
прочими материалами, характеризующими объекты электростанции (по электрической части собственных нужд, по системам топливоснабжения и т. п.).
Технологические чертежи и другие материалы, дополняющие задание, должны давать общее представление об объектах, подлежащих оснащению устройствами контроля и управления. Чертежи должны позволить определять расстояние от мест расположения первичных измерительных приборов и регулирующих органов до постов управления и до других элементов аппаратуры. На чертежах производственных помещений должны быть намечены места предполагаемого расположения постов управления.
В составлении задания на проектирование автоматизации технологических объектов обычно принимает участие проектная организация, выполняющая технический или технорабочий проект
Задание содержит следующие сведения:
наименование предприятия и задачу проекта;
основание для проектирования (приказ, план выполнения работ, инициатива);
перечень производств, цехов, агрегатов, установок, для которых выполняется проект систем автоматизации с указанием особых условий (например, взрыво- и пожарoопасность, агрессивная, влажная, запыленная окружающая среда и т.п.);
планируемый уровень капитальных затрат на автоматизацию и примерных затрат на НИР, ОКР и проектирование с указанием источника финансирования;
cроки строительства и очередность ввода в действие производственных подразделений и технологических узлов;
предложения по структуре управления, объему и уровню автоматизации;
предложения по размещению пунктов управления, щитов и пультов, выбор средств автоматизации;
Исходные данные для проектирования
Технологические схемы с характеристиками оборудования и трубопроводов.
Перечни контролируемых и регулируемых параметров с необходимыми требованиями и характеристиками (номинальное значение, диапазон изменения, метрологические характеристики и т.д.)
Чертежи производственных помещений с указанием рекомендуемых мест установки щитов и пультов управления.
Схемы управления электродвигателями, типы пусковой аппаратуры и станций управления.
Данные, необходимые для расчета сужающих устройств, датчиков и регулирующих органов.
Требования к надежности и живучести систем автоматизации.
УПРАВЛЕНИЕ ОБЪЕКТАМИ С БОЛЬШИМ ЗАПАЗДЫВАНИЕМ




![]()
![]()
Временные задержки (или запаздывания) довольно часто наблюдаются в промышленных процессах, связанных с транспортировкой, перемешиванием, горением веществ. Они приводят к тому, что информация о ходе процесса поступает к регулятору позже, чем это требуется, что может привести к неустойчивости замкнутой системы. Сложность управления объектами с временными задержками характеризуется отношением величины запаздывания к постоянной времени объекта: чем оно больше – тем труднее добиться требуемого качества регулирования.
Повысить качество управления такими объектами можно двумя способами:
· уменьшением запаздывания в объекте путем внесения конструктивных изменений;
· применением более сложной структуры системы управления, позволяющей уменьшить негативное влияние запаздывания.
Одной из структур, предназначенных для управления объектами с запаздыванием, является предиктор Смита. Его рекомендуют применять при соотношении величины запаздывания к постоянной времени объекта, описываемом следующим соотношением [1]:
 , (1)
, (1)
где:  — время запаздывания,
— время запаздывания,  — постоянная времени объекта.
— постоянная времени объекта.
Структурная схема замкнутой системы автоматического регулирования (САР) с предиктором Смита приведена на рис. 1, а [2]. Она содержит дополнительный внутренний контур обратной связи с модельным блоком, в котором содержится модель объекта c запаздыванием, а также модель объекта без запаздывания. Дополнительный контур обратной связи формирует сигнал, идентичный такому, который со временем появится на выходе системы, и подает его на вход регулятора до тех пор, пока не появится сигнал от главной цепи обратной связи. По мере его возрастания сигнал с выхода модельного блока уменьшается.
Также для управления объектами с запаздываниями применяется ППИ (предиктивный пропорционально-интегрирующий) регулятор, который является модификацией предиктора Смита [3]. Его структурная схема изображена на рис. 1, б.
 а)
а)
Рис. 1. Структурные схемы САР: а) с предиктором Смита; б) с ППИ – регулятором
На рисунке 1 приняты следующие обозначения:
 — заданное значение регулируемой величины;
— заданное значение регулируемой величины;
 — возмущение;
— возмущение;
 — текущее значение регулируемой величины;
— текущее значение регулируемой величины;
 — сигнал рассогласования;
— сигнал рассогласования;
 — управляющий сигнал;
— управляющий сигнал;
 — сигнал с выхода модельного блока;
— сигнал с выхода модельного блока;
 — передаточная функция объекта регулирования;
— передаточная функция объекта регулирования;
 — передаточная функция регулятора (используется ПИ-регулятор);
— передаточная функция регулятора (используется ПИ-регулятор);
 — передаточная функция модели объекта;
— передаточная функция модели объекта;
 — передаточная функция части модели объекта без запаздывания;
— передаточная функция части модели объекта без запаздывания;
 — величина запаздывания модели объекта;
— величина запаздывания модели объекта;
 — инерционная составляющая ППИ – регулятора.
— инерционная составляющая ППИ – регулятора.
По сравнению с предиктором Смита, ППИ – регулятор медленнее отрабатывает воздействие по заданию или возмущению. В то же время он является более устойчивым и легче в настройке, т. к. настройке подлежат только 3 параметра, а не 5 (как в предикторе Смита).
Кроме ППИ – регулятора, известно много других модификаций предиктора Смита; однако, они не получили широкого распространения.
Поэтому исследования были направлены на нахождение алгоритма оптимального параметрического синтеза (ОПС) для настройки значений параметров САР с предиктором Смита и ППИ-регулятором. Были созданы программы, позволяющие провести оптимизацию значений параметров САР с предиктором Смита и ППИ-регулятором. В качестве метода оптимизации использован метод Хука-Дживса [4] с небольшим дополнением. Оно заключаются в том, что если в текущем цикле оптимизации уменьшение критерия оптимизации было достигнуто при шаге в строну уменьшения значения параметра, то на следующем шаге в первую очередь делается шаг в том же направлении, и наоборот.

В качестве критериев оптимизации использовались интегральные критерии, которые в общем виде описывает выражение (2).
 , (2)
, (2)
где:  — пределы интегрирования;
— пределы интегрирования;
 — функция цели;
— функция цели;
 — сигнал ошибки;
— сигнал ошибки;
 — время;
— время;
 — постоянные числовые коэффициенты;
— постоянные числовые коэффициенты;  ;
;  ;
;
 — вектор параметров САР, которые подлежат оптимизации.
— вектор параметров САР, которые подлежат оптимизации.
Большинство объектов в промышленности можно упрощенно описать в виде комбинации апериодического звена первого порядка и звена запаздывания. Поэтому в исследованиях использовались такие типы объектов, передаточная функция которых имеет вид (3).
 . (3)
. (3)
где:  — коэффициент усиления объекта;
— коэффициент усиления объекта;
 — постоянная времени объекта;
— постоянная времени объекта;
 — время запаздывания объекта.
— время запаздывания объекта.
Так как в предикторе Смита необходимо подстраивать параметры ПИ-регулятора и модели объекта, то для него, прежде всего, были проведены исследования по нахождению наилучшей последовательности оптимизации. Проводилась как последовательная оптимизация параметров указанных выше элементов САР, так и одновременная.
Исследования проводились в следующих двух случаях:
1) Когда известны достаточно точные значения параметров объекта. В этом случае можно сразу задать значение параметров модели объекта близкими к самому объекту. Поэтому оптимизируется только ПИ-регулятор. Пример оптимизации в этом случае приведен на рис. 2, а и рис. 3, а.
2) Когда неизвестные приближены значение параметров объекта. Это может быть как при начальной настройке системы, так и в процессе эксплуатации системы, когда наблюдается дрейф параметров объекта. Поэтому оптимизируется как модель объекта, так и ПИ-регулятор. Пример оптимизации в этом случае приведен на рис. 2, б и рис. 3, б.
Графики, отображающие пример оптимизации значений параметров, приведены на рис. 2 и 3.
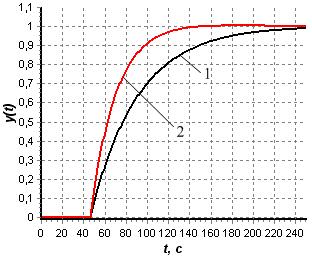
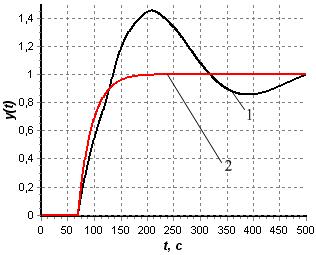
Рис. 2. Кривые переходных процессов в САР с предиктором Смита до оптимизации параметров (кривая 1) и после (кривая 2).
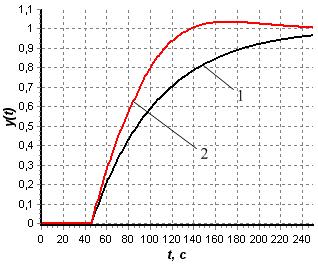
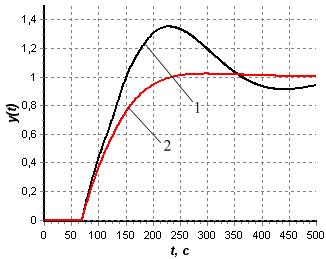
Рис. 3. Кривые переходных процессов в САР с ППИ – регулятором до оптимизации параметров (кривая 1) и после (кривая 2)
Как видим из приведенных выше иллюстраций, проведение ОПС значений параметров САР позволяет улучшить качество управления (увеличить скорость установления процесса, уменьшить динамический заброс, избавится от колебаний).
Наилучшие показатели качества переходного процесса при наименьшем количестве шагов в результате оптимального параметрического синтеза достигаются при одновременной оптимизации параметров ПИ-регулятора и модели объекта в случае предиктора Смита. В случае ППИ-регулятора оптимизируются одновременно 3 параметра:  .
.
В большинстве случаев наилучшие результаты (наименьшую динамическую ошибку, время регуляции и степень затухания) были получены при параметрах критерия  . При увеличении значения
. При увеличении значения  увеличивается количество шагов оптимизации, увеличивается перерегулирование и уменьшается степень затухания, а при уменьшении – увеличивается время регуляции без существенного увеличения шагов оптимизации.
увеличивается количество шагов оптимизации, увеличивается перерегулирование и уменьшается степень затухания, а при уменьшении – увеличивается время регуляции без существенного увеличения шагов оптимизации.



