iSopromat.ru

Скоростью точки называют кинематическую меру ее движения, равную производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета.
Скорость относительно выбранной системы отсчета это одна из основных характеристик движения точки.
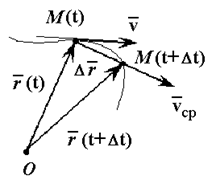
Вектор скорости направлен по касательной к траектории точки в сторону движения.
Рассмотрим перемещение точки за малый промежуток времени Δ t:

средняя скорость точки за промежуток времени D t.
Наш видеоурок по теме:
Скорость точки в данный момент времени
Скорость точки при векторном способе задания движения
Положение движущейся точки М относительно системы отсчета в момент времени t1 определяется радиус-вектором r.
В другой момент времени t1=t+Δt точка займет положение М1 с радиус-вектором r1.
За время Δt радиус-вектор движущейся точки изменится на
Средней скоростью vср называется отношение изменения радиус-вектора Δr к изменению времени Δt.

Скорость точки равна первой производной по времени от ее радиус-вектора.

Скорость точки при координатном способе задания движения
Разложим радиус-вектор и скорость на составляющие, параллельные осям координат. Получим

Проекция скорости точки на какую-либо координатную ось равна первой производной по времени от соответствующей координаты этой точки.
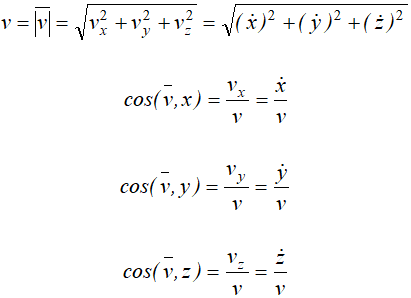
Модуль скорости и направляющие косинусы равны:
Если точка движется в плоскости, то, выбрав оси координат Ox и Oy в этой плоскости, получим:
Для прямолинейного движения точки координатную ось, например ось Ox, направляем по траектории. Тогда
Скорость точки при естественном способе задания движения
Пусть скорость точки задана естественным способом, т.е. заданы траектория точки и закон ее движения по траектории s=f(t).
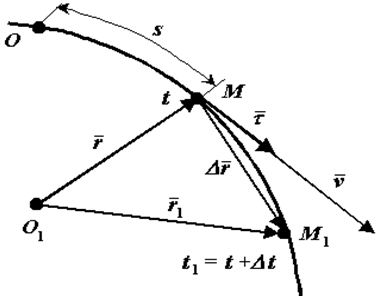
Вычислим скорость точки. Используем радиус-вектор r. движущейся точки, начало которого находится в неподвижной точке O1
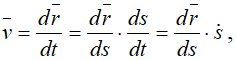

— единичный вектор, направленный по касательной к траектории в сторону возрастающих расстояний.

При ds>0 направления векторов τ и dr совпадают.
Если точка движется в сторону убывающих расстояний, то ds
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Техническая механика
Скорость и ускорение
Скорость точки
В предыдущей статье движение тела или точки определено, как изменение положения в пространстве с течением времени. Для того чтобы более полно охарактеризовать качественные и количественные стороны движения введены понятия скорости и ускорения.
Скорость – это кинематическая мера движения точки, характеризующая быстроту изменения ее положения в пространстве.
Скорость является векторной величиной, т. е. она характеризуется не только модулем (скалярной составляющей), но и направлением в пространстве.

Как известно из физики, при равномерном движении скорость может быть определена длиной пути, пройденного за единицу времени: v = s/t = const (предполагается, что начало отсчета пути и времени совпадают).
При прямолинейном движении скорость постоянна и по модулю, и по направлению, а ее вектор совпадает с траекторией.

Средняя скорость не дает представления об истинной скорости в каждый данный момент времени (истинную скорость иначе называют мгновенной). Очевидно, что чем меньше промежуток времени, за который определяется средняя скорость, тем ближе ее значение будет к мгновенной скорости.
Истинная (мгновенная) скорость есть предел, к которому стремится средняя скорость при Δt, стремящемся к нулю :
Ускорение точки в прямолинейном движении
В общем случае движение точки с изменяющейся во времени скоростью называют ускоренным, при этом считая ускорение, вызывающее уменьшение скорости, отрицательным. Иногда движение, в котором скорость с течением времени уменьшается, называют замедленным.
При прямолинейном движении вектор скорости всегда совпадает с траекторией и поэтому вектор изменения скорости тоже совпадает с траекторией.
Истинное ускорение в прямолинейном движении равно первой производной скорости или второй производной координаты (расстояния от начала отсчета перемещения) по времени.
Ускорение точки в криволинейном движении
При движении точки по криволинейной траектории скорость меняет свое направление, т. е вектор скорости является переменной величиной.

Для нахождения вектора Δv перенесем вектор v1 в точку М и построим треугольник скоростей. Определим вектор среднего ускорения:
Из рисунка 1 видно, что вектор ускорения в криволинейном движении всегда направлен в сторону вогнутости траектории.
Так как векторную производную непосредственно вычислять мы не умеем, то ускорение в криволинейном движении будем определять косвенными методами. Так, например, если движение точки задано естественным способом, то применяется теорема о проекции ускорения на касательную и нормаль. Чтобы понять суть этой теоремы, следует рассмотреть понятие кривизны кривых линий.
Понятие о кривизне кривых линий

Итак, кривизна кривой в данной точке есть величина, обратная радиусу кривизны в данной точке :
Очевидно, что кривизна прямой линии будет равна нулю, а поскольку радиус кривизны такой линии равен бесконечности.
Теорема о проекции ускорения на касательную и нормаль
Проекция ускорения на касательную к траектории называется касательным (тангенциальным) ускорением, а проекция ускорения на нормаль к этой касательной – нормальным ускорением.
Доказательство этой теоремы основывается на геометрических построениях с учетом приведенных ранее зависимостей перемещения, скорости и ускорения от времени. В данной статье доказательство теоремы не приводится; при необходимости, его можно рассмотреть в других источниках информации.
Итак, на основании теоремы об ускорениях, можно записать:
Анализируя формулы касательного и нормального ускорения можно сделать вывод, что касательное ускорение характеризует изменение скорости только по модулю, а нормальное – только по направлению.
Зная величину нормального и касательного ускорения, можно вычислить полное ускорение точки, применив теорему Пифагора:
Часто касательное и нормальное ускорения рассматривают не как проекции, а как составляющие полного ускорения, т. е. как векторные величины.
Виды движения точки в зависимости от ускорения
Анализируя формулы касательного и нормального ускорений, можно выделить следующие виды движения точки:

Теоремы о проекциях скорости и ускорения на координатную ось
Если движение точки задано координатным способом, то путь (перемещение), скорость и ускорение за промежуток времени Δt можно найти, используя проекции этих величин на координатную ось. Очевидно, что приращение любой из координат при Δt стремящемся к нулю тоже стремится к нулю, и предел такого приращения может быть определен из дифференциальных отношений, устанавливаемых теоремами о проекциях скорости и ускорения:
Теорема: проекция скорости на координатную ось равна первой производной от соответствующей координаты по времени :
Теорема: проекция ускорения на координатную ось равна второй производной от соответствующей координаты по времени :
Зная проекции скорости или ускорения на координатные оси, можно определить модуль и направление вектора любой из этих величин, используя теорему Пифагора и тригонометрические соотношения.
iSopromat.ru
Рассмотрим определение скоростей и ускорений точек вращающегося твердого тела: 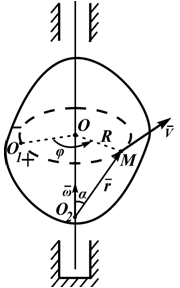
При вращении твердого тела вокруг неподвижной оси каждая точка тела движется по окружности. Радиус окружности R равен расстоянию от точки до оси вращения.
Закон движения точки может быть задан естественным способом (рисунок 2.4): траектория – окружность; начало отсчета точка O1 и положительное направление движения выбраны, длина дуги (дуговая координата) определяется по формуле

Скорости точек
Скорость точки вращающегося твердого тела определяется выражением
где ω — угловая скорость вращения твердого тела.
Скорость направлена по касательной к траектории, поэтому можно написать

Вектор скорости можно получить векторным произведением:
Ускорения точек
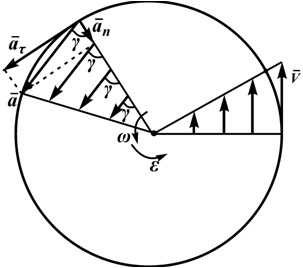
Ускорение точки при естественном способе задания движения определяется как сумма касательного и нормального ускорений (см. вывод формулы (1.10)):
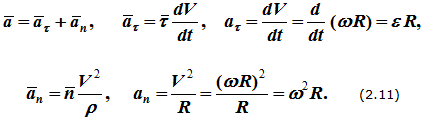
Эти же выражения можно получить, взяв производную от векторного произведения V=ω × r.
Угол, который составляет полное ускорение с радиусом, может быть определен из соотношения (рисунок 2.5)
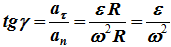
То есть эти углы для всех точек тела одинаковы и не зависят от их расположения на теле. На этом же рисунке представлены законы распределения скоростей и ускорений точек во вращающемся теле в зависимости от расстояния их до оси вращения. Эти законы распределения соответствуют формулам:

Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
iSopromat.ru
Рассмотрим определение величины и направления скоростей и ускорений точек при сложном движении. Кориолисово ускорение, правило векторного произведения и правило Жуковского.
Теоремы о скоростях и ускорениях точек в сложном движении подробно изложены в учебниках по теоретической механике.
Абсолютная скорость точки при сложном движении определяется как геометрическая сумма переносной и относительной скоростей:
Каждое слагаемое в этой формуле определяется независимо друг от друга, исходя из соответствующего закона движения. В примере на рисунке 3.2 относительная скорость Vr определяется с учетом закона движения точки по оси Oy.
Переносная скорость определится как скорость точки M при вращении вместе с квадратом вокруг оси его вращения. Величина абсолютной скорости может быть определена с помощью теоремы косинусов:

Для определения вектора абсолютной скорости можно равенство (3.1) спроецировать на выбранные оси координат, найти проекции абсолютной скорости, её величину и направляющие косинусы, то есть определить углы, которые вектор скорости составляет с выбранными осями.
Ускорение точки при сложном движении определяется как сума трех ускорений: переносного, относительного и кориолисова (поворотного):

Первые два слагаемые этой формулы определяются из соответствующих законов переносного и относительного движений. В случае неравномерных криволинейных движений эта формула имеет вид


Величина этого ускорения
где α — угол между векторами переносной угловой и линейной относительной скоростями.
Направление кориолисова ускорения определяется двумя правилами:
1. Правило векторного произведения при сложном движении
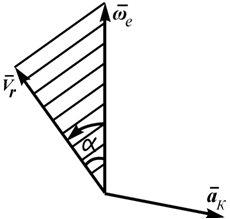
Согласно этому правилу вектор кориолисова ускорения перпендикулярен векторам ωe и Vr (или плоскости, проходящей через эти вектора, проведенные из одной точки). Направлен вектор aK так, что если смотреть ему навстречу, то кратчайший поворот вектора ωe до совмещения с вектором Vr происходит против хода часовой стрелки (рисунок 3.3).
2. Правило Жуковского при сложном движении
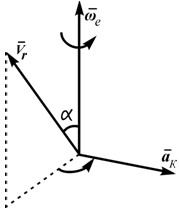
Для определения направления кориолисова ускорения при сложном движении нужно спроецировать вектор относительной скорости в плоскость, перпендикулярную вектору переносной угловой скорости и полученную проекцию повернуть на в сторону переносного вращения (рисунок 3.4).
Из формулы (3.5) видно, что кориолисово ускорение равно нулю, если
Абсолютное ускорение точки при сложном движении определяется по аналогии с определением её скорости. Формула (3.3) проецируется на выбранные оси координат, и находятся проекции абсолютного ускорения на эти оси: ax, ay, az. Величина ускорения определяется по формуле:

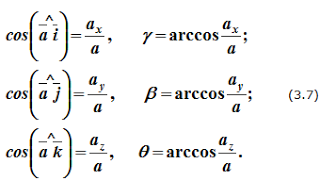
Направление вектора абсолютного ускорения определяется с помощью направляющих косинусов, то есть определяются углы, которые вектор ускорения составляет с осями координат:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Тема 1.6. Основные понятия кинематики
§1. Кинематика точки. Введение в кинематику.
Кинематикой (от греческого «кинема» — движение) называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Для определения положения движущегося тела (или точки) в разные моменты времени с телом, по отношению к которому изучается движение, жестко связывают какую-нибудь систему координат, образующую вместе с этим телом систему отсчета.
Рис.1. Система отчета
Изображать систему отсчета будем в виде трех координатных осей (не показывая тело, с которым они связаны).
Движение тел совершается в пространстве с течением времени. Пространство в механике мы рассматриваем, как трехмерное евклидово пространство.
Время является скалярной, непрерывно изменяющейся величиной. В задачах кинематики время t принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т.е. как функции времени t.
Для решения задач кинематики надо, чтобы изучаемое движение было как-то задано (описано).
Основная задача кинематики точки твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение.
Положение тела можно определить с помощью радиус-вектора или с помощью координат.
Рис.2. Радиус-вектор
Рис.3. Координаты точки М
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом «тело» будем понимать «материальная точка».
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. Вид траектории зависит от выбора системы отсчета.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
где и — радиус-векторы тела в эти моменты времени.Единицы измерения в системе СИ: м (метр).
Модуль перемещения не может быть больше пути: ≤s.
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:
Видео-урок «Механическое движение»
§2. Способы задания движения точки
Для задания движения точки можно применять один из следующих трех способов:
1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки.
Рис.4. Движение точки М
При движении точки М вектор будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t:
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.4), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т.е. знать зависимости
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
3. Естественный способ задания движения точки.
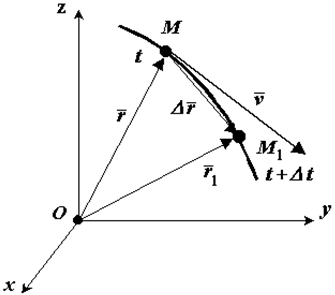
Рис.5. Движение точки М
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.5) Выберем на этой траектории какую-нибудь неподвижную точку О’, которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость s=f(t).
§3. Вектор скорости точки
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Понятие скорости точки в равномерном прямолинейном движении относится к числу элементарных понятий.
Единица измерения скорости – м/с. Часто используют и другие единицы, например, км/ч: 1 км/час=1/3,6 м/с.
Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным.
Для равномерно-прямолинейного движения ∆r=v∆t, где v – постоянный вектор скорости.
Из соотношения видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени.



